
Chaos-Enhanced Adaptive Hybrid Butterfly Particle Swarm Optimization Algorithm for Passive Target Localization


Abstract
:1. Introduction
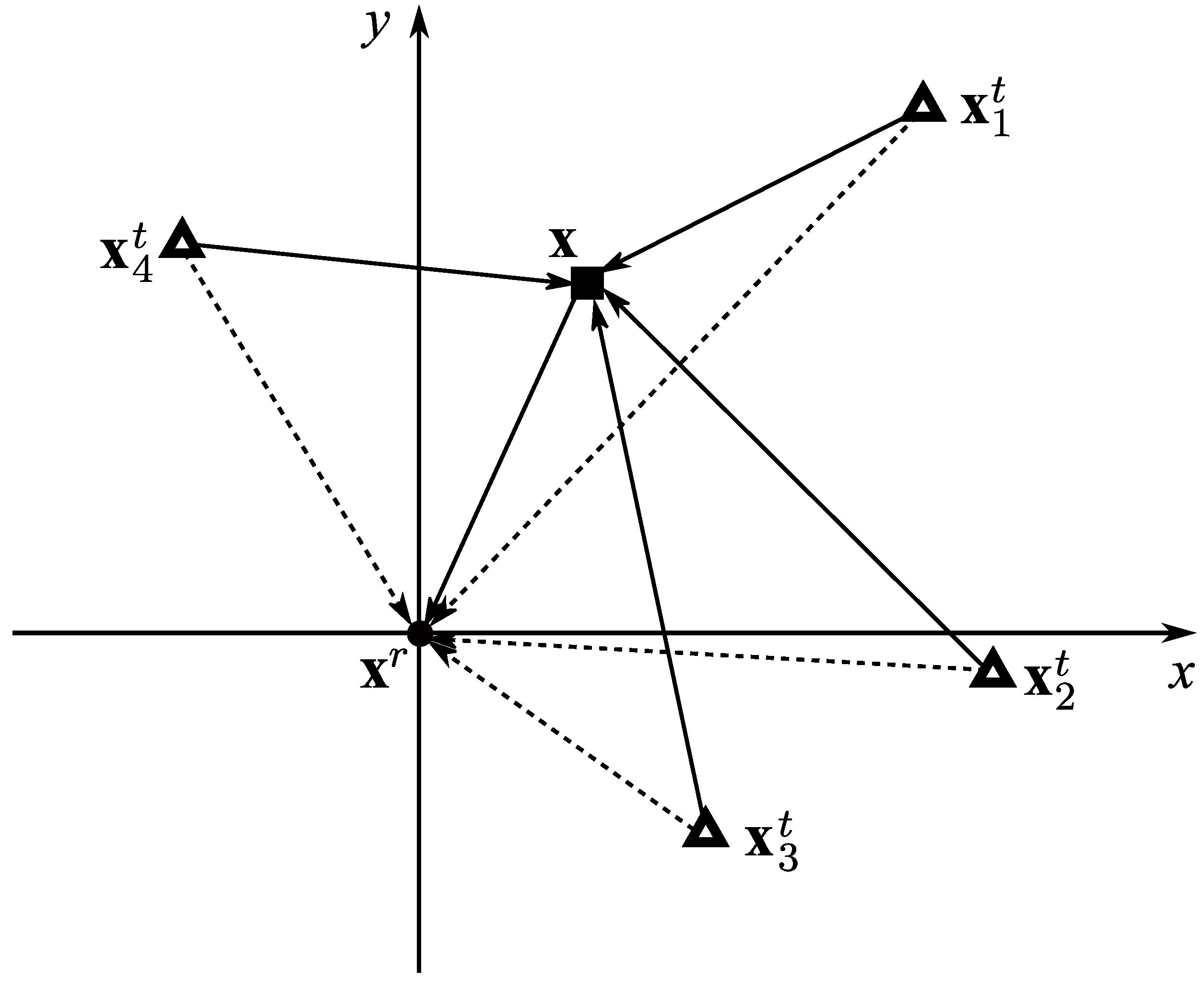
- The problem of localization of a passive target is formulated using noisy TDOA measurements obtained from a set of transmitters and a single receiver, for the case of LOS conditions. Due to the highly nonlinear and non-convex nature of the ML estimation problem that has been formulated for the consideration localization problem, sophisticated optimization algorithms are proposed to address this complex optimization problem.
- By converting the considered multimodal optimization problem to a problem with distinct single extremum, the SDP method, as a convex method, is employed to effectively address the ML estimation problem.
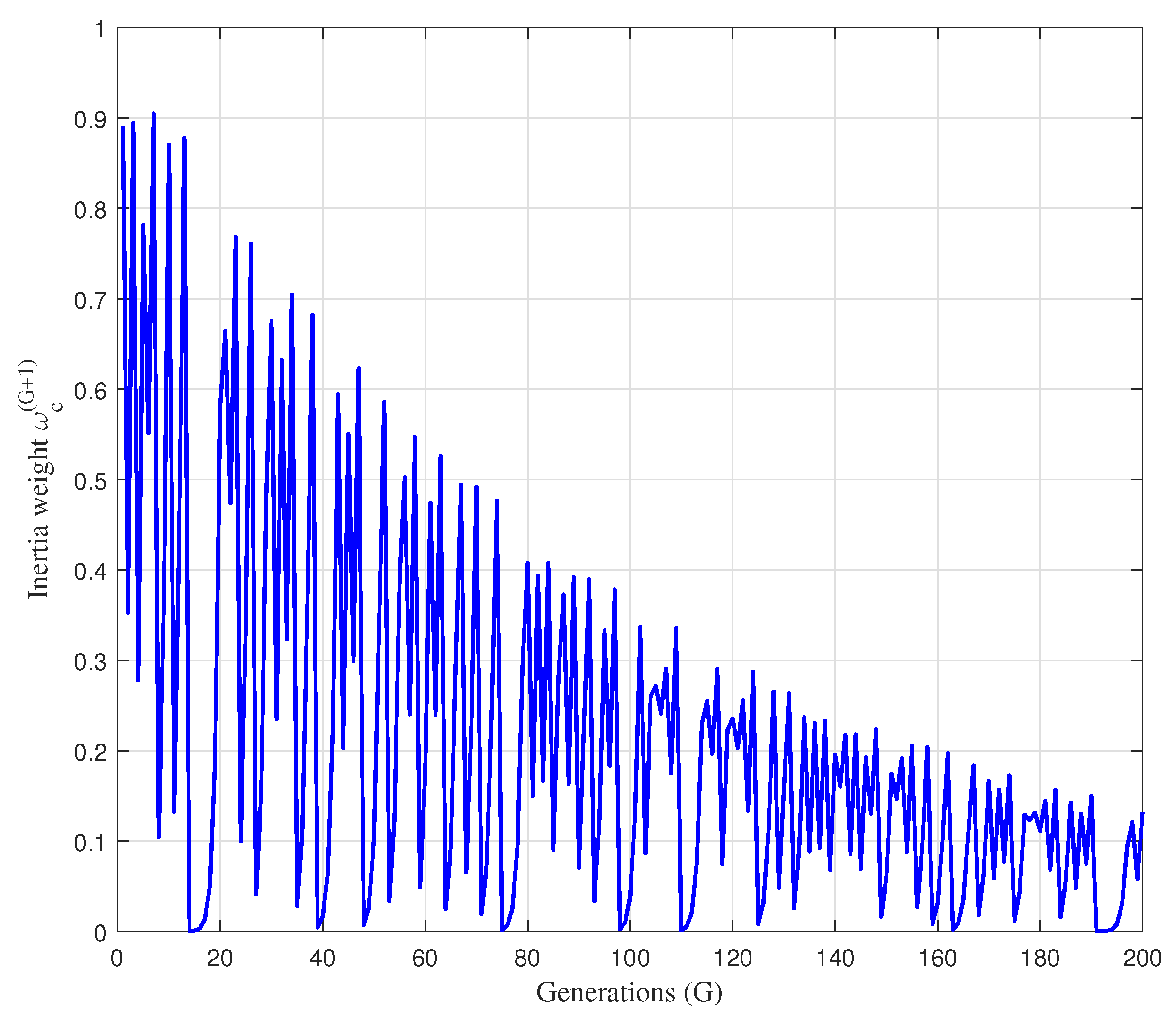
- The enhanced CAHBPSO algorithm—a hybridization of the BOA and the PSO algorithms—is proposed, to precisely estimate the position of the passive target. To improve convergence and maintain population diversity the global and local search phases of the BOA algorithm are incorporated into the velocity update equation of the PSO algorithm. In addition, instead of fixed-switch probability, an adaptive parameter is employed to effectively maintain a trade-off between global and local search abilities throughout the iteration process. Furthermore, the sensory fragrance of the BOA algorithm is adaptively updated and logistic chaos map is incorporated into the expression for the inertia weight parameter of the PSO algorithm.
- The Wilcoxon signed-rank test and Friedman test are employed for statistical performance comparison between CAHBPSO algorithm with several widely applied EAs on a set of CEC2014 problems. Analyzing the optimization performance, according to the statistical analysis’s findings the modifications and hybridization proposed in this paper successfully enhance the CAHBPSO algorithm.
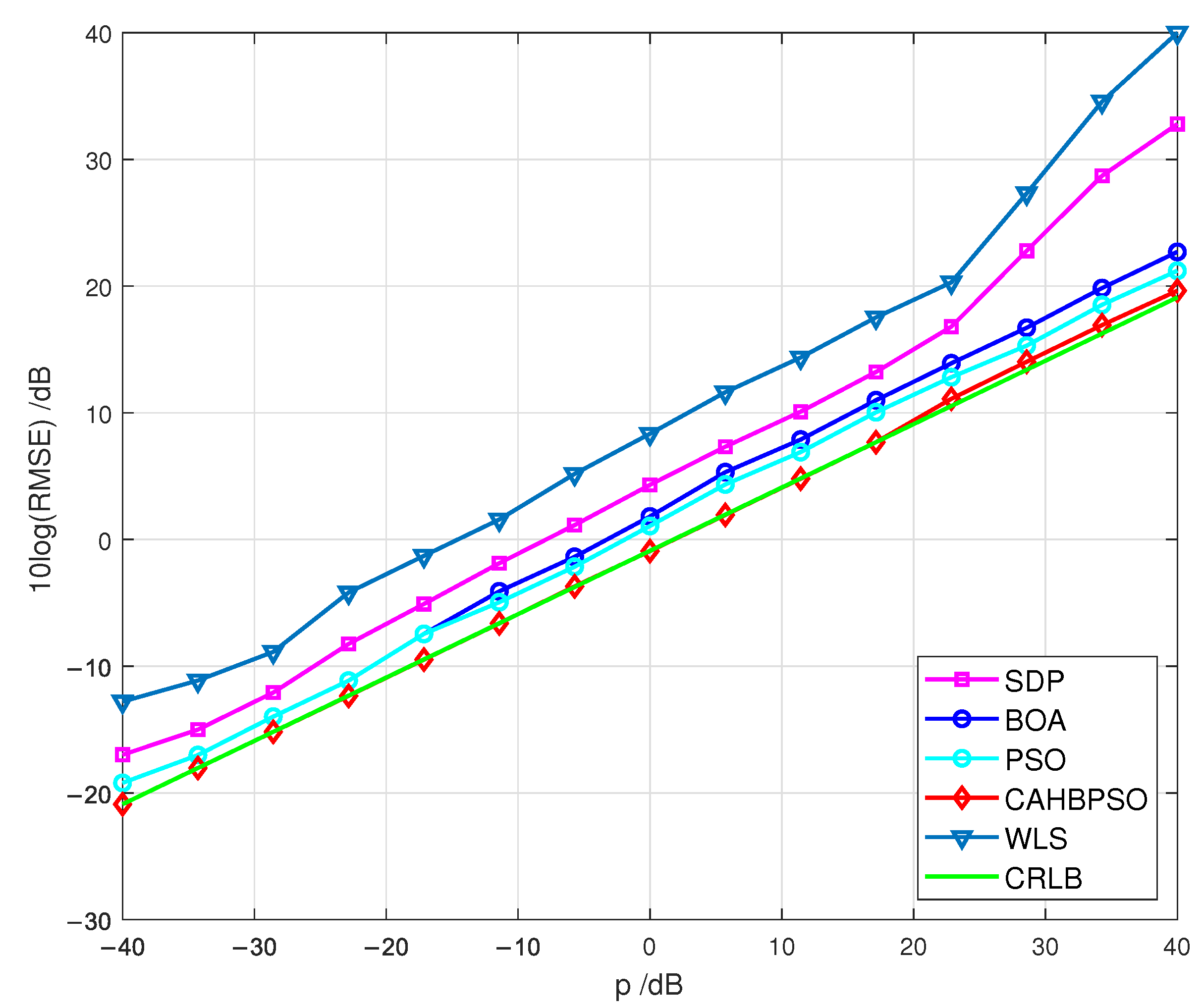
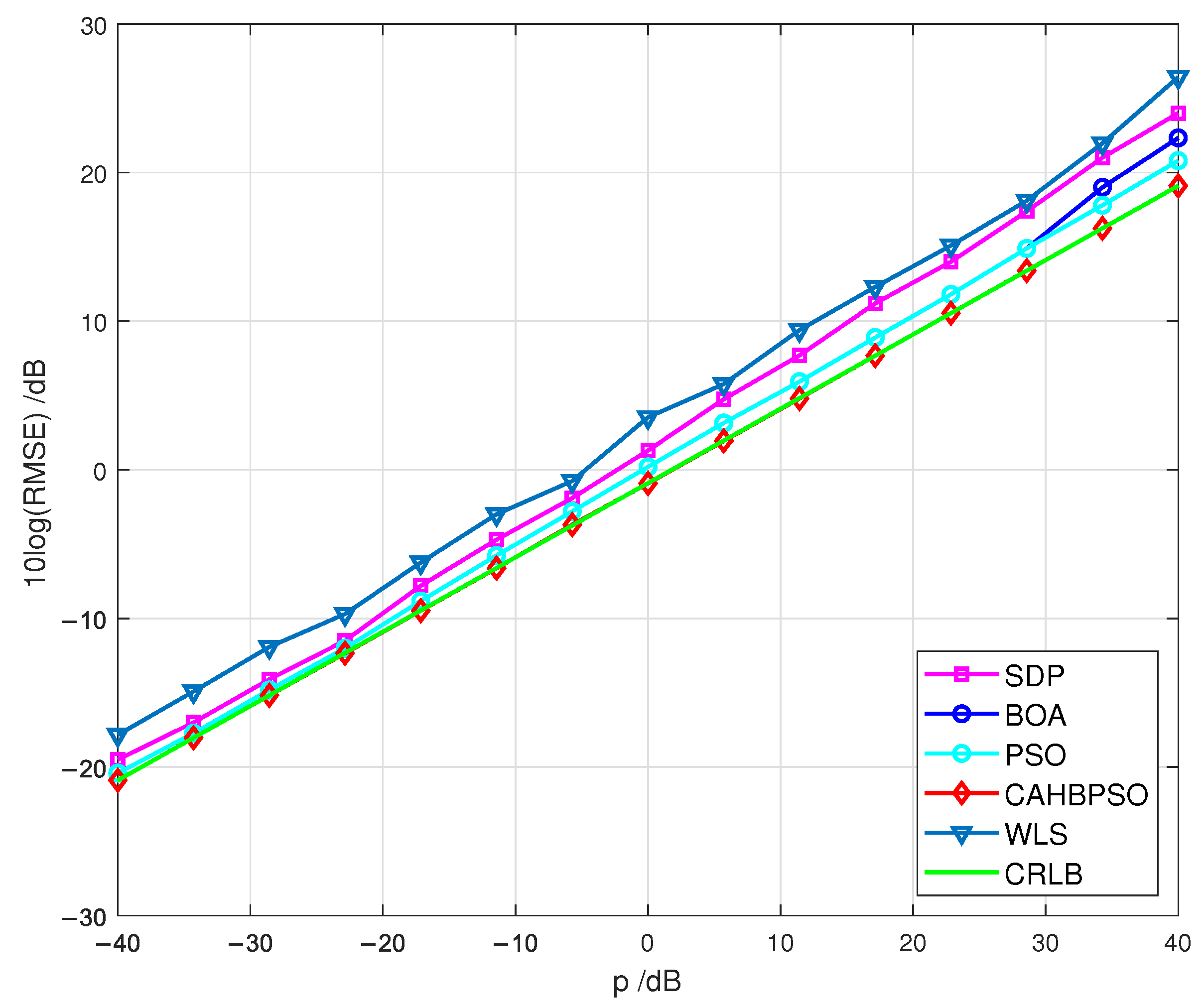
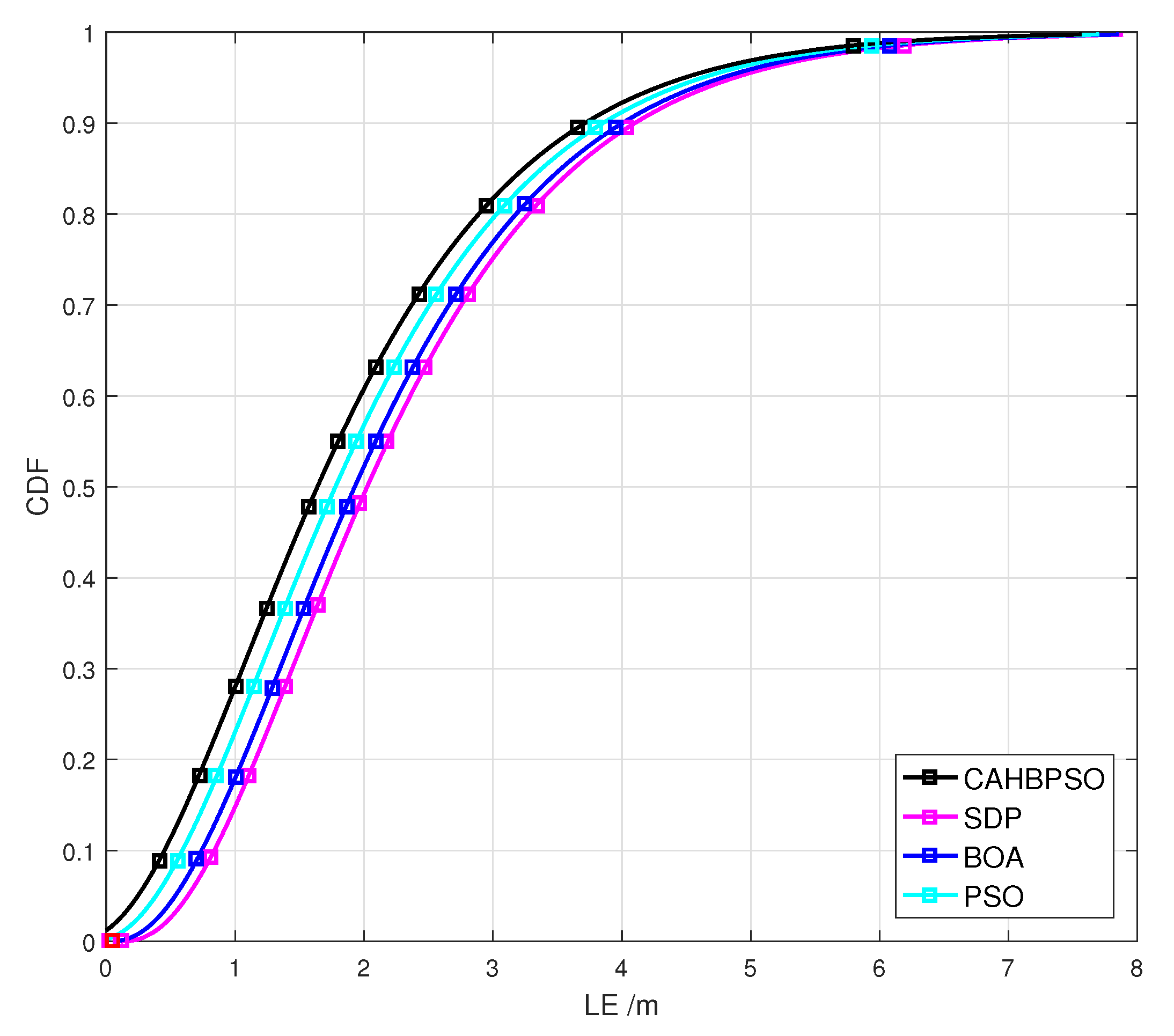
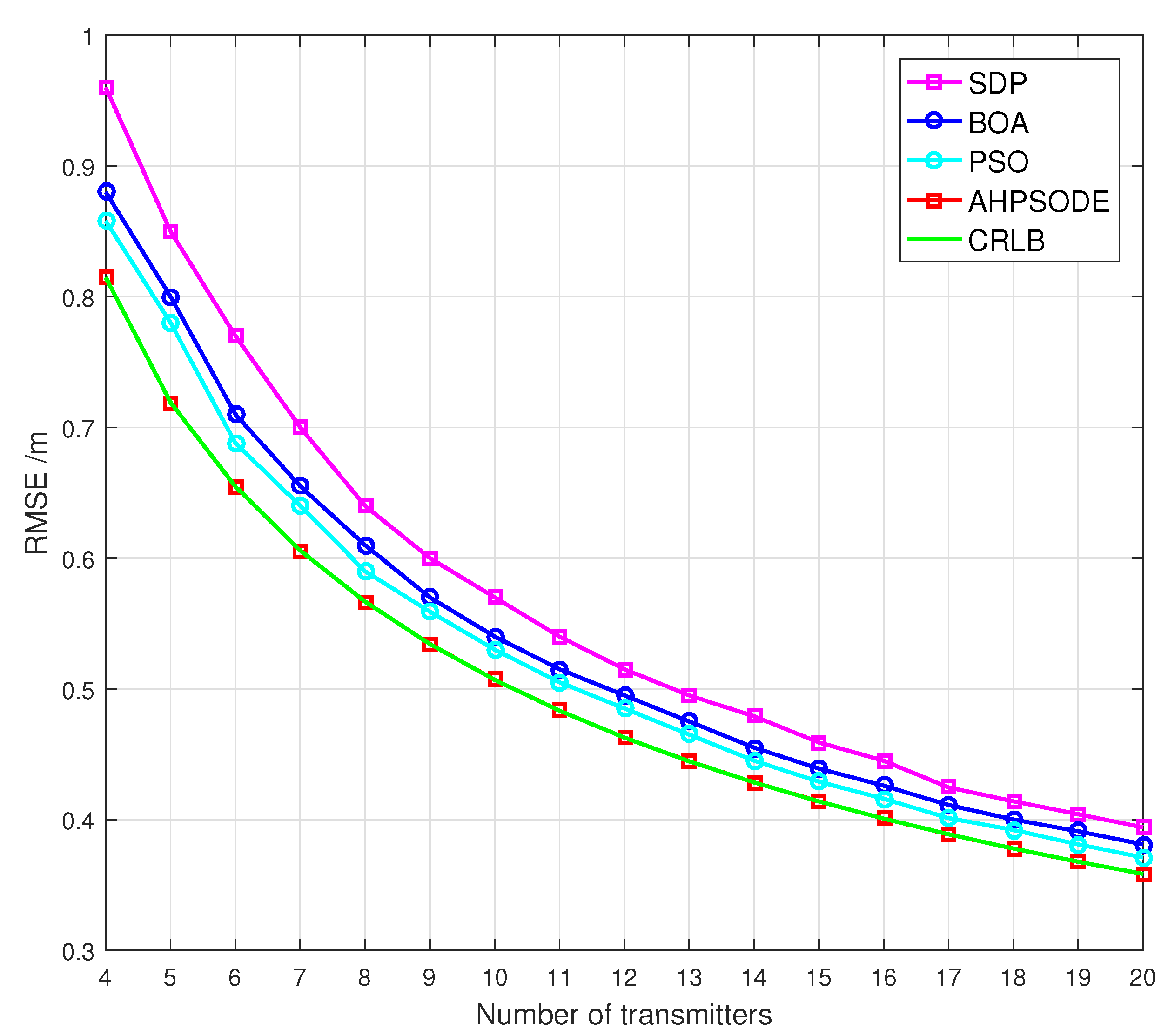
- The results of the numerical simulation demonstrate that the proposed CAHBPSO method outperforms SDP, BOA, and PSO algorithms in terms of localization performance and CRLB accuracy. Furthermore, according to the simulation findings, the CAHBPSO method performs the best when there is a high level of measurement noise and it is not sensitive to changes in network layout. In terms of computational complexity, the simulation results showed that the proposed algorithm provides a proper balance between localization accuracy and complexity compared to other considered algorithms.
2. Background and Related Work
3. Localization Problem
4. Maximum Likelihood Estimator
5. Semidefinite Programming Method
6. Butterfly Optimization Algorithm and the Proposed Improved Version
6.1. Conventional BOA Algorithm
- All butterflies are said to release some fragrance in order to attract one another.
- Each butterfly either moves randomly or towards the butterfly with the strongest fragrance (i.e., the best butterfly in the current generation)
- The stimulus intensity of a butterfly is proportional to the objective function value.
6.2. Improved BOA Algorithm
7. Particle Swarm Optimization and the Proposed Improved Version
7.1. Conventional PSO Algorithm
7.2. Chaos Enhanced PSO Algorithm
Chaotic Dynamic Inertia Weight
8. Chaos Enhanced Adaptive Hybrid Butterfly Particle Swarm Optimization Algorithm
| Algorithm 1 Position update of the ith butterfly of the proposed hybrid CAHBPSO algorithm. |
| if then |
| if then |
| else |
| end if |
| else if then |
| if then |
| else |
| end if |
| end if |
| Algorithm 2 Pseudo-code of the proposed CAHBPSO algorithm. |
| Generate initial population |
| Determine stimulus intensity |
| Set the value of parameters , , a, , , |
| Initialize values of and |
| while stopping criteria not met do |
| Calculate adaptive sensory modality function according to Equation (39) |
| for each butterfly i in the population do |
| Calculate fragrance |
| end for |
| Find the best butterfly |
| Calculate chaotic inertia weight according to Equation (45) |
| for each butterfly i in the population do |
| if then |
| if then |
| else |
| end if |
| else if then |
| if then |
| else |
| end if |
| end if |
| end for |
| Find the global best solution |
| Determine the personal best solution according to: |
| end while |
9. Cramer–Rao Lower Bound
10. Experimental Study
10.1. Statistical Evaluation of CAHBPSO Method against the CEC2014 Benchmark
- unimodal optimization problems;
- simple multimodal objective functions;
- hybrid objective functions, in which variables are subdivided and various basic functions are applied to each subset;
- composition functions, which provide continuity around the optimal solution and merge the properties of sub-functions.
10.2. Localization Performance of the Proposed CAHBPSO Algorithm
Computational Complexity of the Considered Algorithms
11. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Sachs, J. Handbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, Applications; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Chalise, B.K.; Zhang, Y.D.; Amin, M.G.; Himed, B. Target localization in a multi-static passive radar system through convex optimization. Signal Process. 2014, 102, 207–215. [Google Scholar] [CrossRef]
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localisation systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Shen, L.; Zhang, Q.; Pang, J.; Xu, H.; Li, P.; Xue, D. ANTspin: Efficient Absolute Localization Method of RFID Tags via Spinning Antenna. Sensors 2019, 19, 2194. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.H.; Ra, W.S.; Park, S.Y.; Park, J.B. Robust least squares approach to passive target localization using ultrasonic receiver array. IEEE Trans. Ind. Electron. 2014, 61, 1993–2002. [Google Scholar] [CrossRef]
- Noroozi, A.; Sebt, M.A. Target localization from bistatic range measurements in multi-transmitter multi-receiver passive radar. IEEE Signal Process. Lett. 2015, 22, 2445–2449. [Google Scholar] [CrossRef]
- Wang, G.; Li, Y.; Ansari, N. A semidefinite relaxation method for source localization using TDOA and FDOA measurements. IEEE Trans. Veh. Technol. 2013, 62, 853–862. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, L.; Yang, X.S.; Dai, Y. A novel hybrid firefly algorithm for global optimization. PLoS ONE 2016, 11, e0163230. [Google Scholar] [CrossRef] [Green Version]
- Yue, Y.; Cao, L.; Hu, J.; Cai, S.; Hang, B.; Wu, H. A Novel Hybrid Location Algorithm Based on Chaotic Particle Swarm Optimization for Mobile Position Estimation. IEEE Access 2019, 7, 58541–58552. [Google Scholar] [CrossRef]
- Mohamed, A.W.; Almazyad, A.S. Differential evolution with novel mutation and adaptive crossover strategies for solving large scale global optimization problems. Appl. Comput. Intell. Soft Comput. 2017, 2017, 7974218. [Google Scholar] [CrossRef]
- Kuila, P.; Gupta, S.K.; Jana, P.K. A novel evolutionary approach for load balanced clustering problem for wireless sensor networks. Swarm Evol. Comput. 2013, 12, 48–56. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Ji, G. A comprehensive survey on particle swarm optimization algorithm and its applications. Math. Probl. Eng. 2015, 2015, 931256. [Google Scholar] [CrossRef] [Green Version]
- Arora, S.; Singh, S. Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Cheng, J.; Xia, L. An effective Cuckoo search algorithm for node localization in wireless sensor network. Sensors 2016, 16, 1390. [Google Scholar] [CrossRef] [Green Version]
- Arora, S.; Singh, S. An Effective Hybrid Butterfly Optimization Algorithm with Artificial Bee Colony for Numerical Optimization. Int. J. Interact. Multimed. Artif. Intell. 2017, 4, 14–21. [Google Scholar] [CrossRef] [Green Version]
- Wu, P.; Su, S.; Zuo, Z.; Guo, X.; Sun, B.; Wen, X. Time Difference of Arrival (TDoA) Localization Combining Weighted Least Squares and Firefly Algorithm. Sensors 2019, 19, 2554. [Google Scholar] [CrossRef] [Green Version]
- Arora, S.; Singh, S. Node localization in wireless sensor networks using butterfly optimization algorithm. Arab. J. Sci. Eng. 2017, 42, 3325–3335. [Google Scholar] [CrossRef]
- Arora, S.; Anand, P. Binary butterfly optimization approaches for feature selection. Expert Syst. Appl. 2019, 116, 147–160. [Google Scholar] [CrossRef]
- Fan, Y.; Shao, J.; Sun, G.; Shao, X. A self-adaption butterfly optimization algorithm for numerical optimization problems. IEEE Access 2020, 8, 88026–88041. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. An improved butterfly optimization algorithm with chaos. J. Intell. Fuzzy Syst. 2017, 32, 1079–1088. [Google Scholar] [CrossRef]
- Li, G.; Shuang, F.; Zhao, P.; Le, C. An improved butterfly optimization algorithm for engineering design problems using the cross-entropy method. Symmetry 2019, 11, 1049. [Google Scholar] [CrossRef] [Green Version]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar] [CrossRef]
- Tanweer, M.R.; Suresh, S.; Sundararajan, N. Dynamic mentoring and self-regulation based particle swarm optimization algorithm for solving complex real-world optimization problems. Inf. Sci. 2016, 326, 1–24. [Google Scholar] [CrossRef]
- Su, P.; Cai, C.; Song, Y.; Ma, J.; Tan, Q. A Hybrid Diffractive Optical Element Design Algorithm Combining Particle Swarm Optimization and a Simulated Annealing Algorithm. Appl. Sci. 2020, 10, 5485. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, H.; Li, K.; Lin, Z.; Yang, J.; Shen, X.L. A hybrid particle swarm optimization algorithm using adaptive learning strategy. Inf. Sci. 2018, 436, 162–177. [Google Scholar] [CrossRef]
- Harrison, K.R.; Engelbrecht, A.P.; Ombuki-Berman, B.M. Self-adaptive particle swarm optimization: A review and analysis of convergence. Swarm Intell. 2018, 12, 187–226. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Wang, Z.; Liu, X.; Zeng, N.; Bell, D. A novel particle swarm optimization approach for patient clustering from emergency departments. IEEE Trans. Evol. Comput. 2018, 23, 632–644. [Google Scholar] [CrossRef] [Green Version]
- Tian, D.; Zhao, X.; Shi, Z. Chaotic particle swarm optimization with sigmoid-based acceleration coefficients for numerical function optimization. Swarm Evol. Comput. 2019, 51, 100573. [Google Scholar] [CrossRef]
- Yang, D.; Li, G.; Cheng, G. On the efficiency of chaos optimization algorithms for global optimization. Chaos Solitons Fractals 2007, 34, 1366–1375. [Google Scholar] [CrossRef]
- Thompson, J.M.T.; Stewart, H.B. Nonlinear Dynamics and Chaos; John Wiley & Sons: Hoboken, NJ, USA, 2002. [Google Scholar]
- Tavazoei, M.S.; Haeri, M. Comparison of different one-dimensional maps as chaotic search pattern in chaos optimization algorithms. Appl. Math. Comput. 2007, 187, 1076–1085. [Google Scholar] [CrossRef]
- Zhang, M.; Long, D.; Qin, T.; Yang, J. A Chaotic Hybrid Butterfly Optimization Algorithm with Particle Swarm Optimization for High-Dimensional Optimization Problems. Symmetry 2020, 12, 1800. [Google Scholar] [CrossRef]
- Aydilek, I.B. A hybrid firefly and particle swarm optimization algorithm for computationally expensive numerical problems. Appl. Soft Comput. 2018, 66, 232–249. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, G.; Wang, X.; Ni, P.; Zhang, J. A hybrid identification method on butterfly optimization and differential evolution algorithm. Smart Struct. Syst. 2020, 26, 345–360. [Google Scholar]
- Zhang, X.; Guo, P.; Zhang, H.; Yao, J. Hybrid Particle Swarm Optimization Algorithm for Process Planning. Mathematics 2020, 8, 1745. [Google Scholar] [CrossRef]
- Li, W.; Wei, P.; Xiao, X. A robust TDOA-based location method and its performance analysis. Sci. China Ser. Inf. Sci. 2009, 52, 876–882. [Google Scholar] [CrossRef]
- Shen, J.; Molisch, A.F.; Salmi, J. Accurate passive location estimation using TOA measurements. IEEE Trans. Wirel. Commun. 2012, 11, 2182–2192. [Google Scholar] [CrossRef]
- Bishop, A.N.; Fidan, B.; Anderson, B.D.; Doğançay, K.; Pathirana, P.N. Optimality analysis of sensor-target localization geometries. Automatica 2010, 46, 479–492. [Google Scholar] [CrossRef]
- Hu, Y.; Leus, G. Robust differential received signal strength-based localization. IEEE Trans. Signal Process. 2017, 65, 3261–3276. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Doğançay, K. Optimal sensor placement for 3-D angle-of-arrival target localization. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1196–1211. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R.; Bernardo, L. On target localization using combined RSS and AoA measurements. Sensors 2018, 18, 1266. [Google Scholar] [CrossRef] [Green Version]
- Jin, B.; Xu, X.; Zhang, T. Robust time-difference-of-arrival (TDOA) localization using weighted least squares with cone tangent plane constraint. Sensors 2018, 18, 778. [Google Scholar] [CrossRef] [Green Version]
- Han, G.; Jiang, J.; Zhang, C.; Duong, T.Q.; Guizani, M.; Karagiannidis, G.K. A survey on mobile anchor node assisted localization in wireless sensor networks. IEEE Commun. Surv. Tutor. 2016, 18, 2220–2243. [Google Scholar] [CrossRef]
- Xiao, H.; Zhang, H.; Wang, Z.; Gulliver, T.A. An RSSI based DV-hop algorithm for wireless sensor networks. In Proceedings of the 2017 IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (PACRIM), Victoria, BC, Canada, 21–23 August 2017; pp. 1–6. [Google Scholar]
- Shen, J.; Wang, A.; Wang, C.; Hung, P.C.; Lai, C.F. An efficient centroid-based routing protocol for energy management in WSN-assisted IoT. IEEE Access 2017, 5, 18469–18479. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Yao, M.; Qiu, Z. VN-APIT: Virtual nodes-based range-free APIT localization scheme for WSN. Wirel. Netw. 2016, 22, 867–878. [Google Scholar] [CrossRef]
- Halder, S.; Ghosal, A. A survey on mobile anchor assisted localization techniques in wireless sensor networks. Wirel. Netw. 2016, 22, 2317–2336. [Google Scholar] [CrossRef]
- Zekavat, R.; Buehrer, R.M. Handbook of Position Location: Theory, Practice and Advances; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 27. [Google Scholar] [CrossRef]
- Noroozi, A.; Sebt, M.A. Weighted least squares target location estimation in multi-transmitter multi-receiver passive radar using bistatic range measurements. IET Radar Sonar Navig. 2016, 10, 1088–1097. [Google Scholar] [CrossRef]
- Kaur, R.; Arora, S. Nature inspired range based wireless sensor node localization algorithms. Int. J. Interact. Multimed. Artif. Intell. 2017, 4, 7–17. [Google Scholar] [CrossRef] [Green Version]
- Rao, S.S. Engineering Optimization: Theory and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Destino, G.; Abreu, G. On the maximum likelihood approach for source and network localization. IEEE Trans. Signal Process. 2011, 59, 4954–4970. [Google Scholar] [CrossRef]
- Kocuk, B.; Dey, S.; Sun, X. Strong SOCP relaxations for the optimal power flow problem. Oper. Res. 2016, 64, 1177–1196. [Google Scholar] [CrossRef] [Green Version]
- Biswas, P.; Liang, T.C.; Toh, K.C.; Ye, Y.; Wang, T.C. Semidefinite programming approaches for sensor network localization with noisy distance measurements. IEEE Trans. Autom. Sci. Eng. 2006, 3, 360–371. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Liu, M.; Chen, T.; Gao, L. TDOA Passive Location Based on Cuckoo Search Algorithm. J. Shanghai Jiaotong Univ. Sci. 2018, 23, 368–375. [Google Scholar] [CrossRef]
- Cakir, O.; Kaya, I.; Yazgan, A.; Cakir, O.; Tugcu, E. Emitter location finding using particle swarm optimization. Radioengineering 2014, 23, 252–258. [Google Scholar]
- Meng, Y.; Zhi, Q.; Zhang, Q.; Yao, N. A Two-Stage Particle Swarm Optimization Algorithm for Wireless Sensor Nodes Localization in Concave Regions. Information 2020, 11, 488. [Google Scholar] [CrossRef]
- Gumaida, B.F.; Luo, J. A hybrid particle swarm optimization with a variable neighborhood search for the localization enhancement in wireless sensor networks. Appl. Intell. 2019, 49, 3539–3557. [Google Scholar] [CrossRef]
- Harikrishnan, R.; Kumar, V.J.S.; Ponmalar, P.S. A Comparative Analysis of Intelligent Algorithms for Localization in Wireless Sensor Networks. Wirel. Pers. Commun. 2016, 87, 1057–1069. [Google Scholar] [CrossRef]
- Qu, X.; Xie, L. An efficient convex constrained weighted least squares source localization algorithm based on TDOA measurements. Signal Process. 2016, 119, 142–152. [Google Scholar] [CrossRef]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Zhao, Q.; Li, C.; Zhu, D.; Xie, C. Coverage Optimization of Wireless Sensor Networks Using Combinations of PSO and Chaos Optimization. Electronics 2022, 11, 853. [Google Scholar] [CrossRef]
- Tian, D.; Shi, Z. MPSO: Modified particle swarm optimization and its applications. Swarm Evol. Comput. 2018, 41, 49–68. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Z.; Yuan, Y.; Zeng, N.; Hone, K.; Liu, X. A novel sigmoid-function-based adaptive weighted particle swarm optimizer. IEEE Trans. Cybern. 2019, 51, 1085–1093. [Google Scholar] [CrossRef]
- Tanabe, R.; Fukunaga, A. Success-history based parameter adaptation for differential evolution. In Proceedings of the 2013 IEEE Congress on Evolutionary Computation, Cancun, Mexico, 20–23 June 2013; pp. 71–78. [Google Scholar]
- Liang, J.J.; Qu, B.Y.; Suganthan, P.N. Problem Definitions and Evaluation Criteria for the CEC 2014 Special Session and Competition on Single Objective Real-Parameter Numerical Optimization; Technical Report 201311, Computational Intelligence Laboratory, Zhengzhou University, Zhengzhou China and Technical Report; Nanyang Technological University: Singapore, 2013; Volume 635, p. 490. [Google Scholar]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Assiri, A.S. On the performance improvement of Butterfly Optimization approaches for global optimization and Feature Selection. PLoS ONE 2021, 16, e0242612. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CAHBPSO | SHADE | FA | BOA | PSO | HPSOBOA | ||
|---|---|---|---|---|---|---|---|
| Mean (STD) Sign | |||||||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | − | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | + | ||
| 30 | ≈ | + | + | − | − | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | − | ||
| 30 | + | + | + | + | − | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | − | ||
| 30 | + | + | + | + | − | ||
| 50 | + | + | + | ≈ | − | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | − | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | + | − | ||
| 100 | + | + | + | + | + | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | − | ||
| 50 | + | + | + | + | − | ||
| 100 | + | + | + | + | + | ||
| 10 | + | + | + | + | − | ||
| 30 | + | + | + | + | − | ||
| 50 | + | + | + | + | − | ||
| 100 | + | + | + | + | + | ||
| 10 | + | + | + | + | − | ||
| 30 | + | + | + | + | − | ||
| 50 | + | + | + | + | − | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | − | ||
| 30 | + | + | + | ≈ | − | ||
| 50 | + | + | + | ≈ | − | ||
| 100 | + | + | + | − | − | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | ≈ | − | ||
| 50 | + | + | + | − | − | ||
| 100 | + | + | + | − | − | ||
| 10 | + | + | + | ≈ | − | ||
| 30 | + | + | + | − | − | ||
| 50 | + | + | + | ≈ | − | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | − | ||
| 30 | + | + | + | + | − | ||
| 50 | + | + | + | + | − | ||
| 100 | + | + | + | + | − | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | + | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | ≈ | + | ||
| 50 | + | + | + | − | + | ||
| 100 | + | + | + | − | + | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | + | ||
| 10 | − | + | − | ≈ | + | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | + | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | + | ||
| 50 | ≈ | + | + | ≈ | + | ||
| 100 | + | + | + | + | + | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | + | ||
| 10 | + | + | + | + | + | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | + | + | ||
| 100 | + | + | + | + | + | ||
| 10 | + | + | + | + | − | ||
| 30 | + | + | + | + | + | ||
| 50 | + | + | + | ≈ | + | ||
| 100 | + | + | + | − | + | ||
| 10 | − | −+ | −+ | −− | −+ | −+ | |
| 30 | − | −+ | −+ | −− | −+ | −− | |
| 50 | − | −+ | −+ | −− | −+ | −− | |
| 100 | − | −+ | + | −− | −+ | −− | |
| 10 | − | −+ | −+ | −+ | −+ | −+ | |
| 30 | − | −+ | −+ | −− | −− | −− | |
| 50 | − | −+ | −+ | −− | −− | −− | |
| 100 | − | −+ | −+ | −− | −− | −− | |
| 10 | − | −+ | −+ | −≈ | −≈ | −+ | |
| 30 | − | −+ | −+ | −− | −+ | −− | |
| 50 | − | −+ | −+ | −− | −+ | −− | |
| 100 | − | −+ | + | −− | −− | −− | |
| 10 | − | −+ | −+ | −+ | −− | −− | |
| 30 | − | −+ | −+ | −+ | −≈ | −+ | |
| 50 | − | −− | −+ | −− | −≈ | −+ | |
| 100 | − | −+ | −+ | −− | −− | −− | |
| 10 | − | −≈ | −+ | −− | −≈ | −− | |
| 30 | − | −+ | −+ | −− | −− | −− | |
| 50 | − | −+ | −+ | −− | −− | −− | |
| 100 | − | −+ | −+ | −− | −≈ | −− | |
| 10 | − | −≈ | −+ | −≈ | −≈ | −− | |
| 30 | − | −+ | −+ | −+ | −− | −− | |
| 50 | − | −+ | −+ | −+ | −≈ | −− | |
| 100 | − | −+ | −+ | −+ | −+ | −− | |
| 10 | − | −+ | −+ | −≈ | −≈ | −+ | |
| 30 | − | −+ | −+ | −− | −+ | −+ | |
| 50 | − | −+ | −+ | −− | −+ | −+ | |
| 100 | − | −+ | −+ | −− | −+ | −+ | |
| 10 | − | −+ | −+ | −+ | −+ | −+ | |
| 30 | − | −+ | −+ | −− | −+ | −− | |
| 50 | − | −+ | −+ | −− | −+ | −− | |
| 100 | − | −+ | −+ | −− | −+ | −− | |
| D | Algorithms | p Value | + | ≈ | − | Dec. | ||
|---|---|---|---|---|---|---|---|---|
| 10 | CAHBPSO versus SHADE | 392 | 73 | 27 | 2 | 1 | + | |
| CAHBPSO versus FA | 465 | 0 | 30 | 0 | 0 | + | ||
| CAHBPSO versus BOA | 376 | 89 | 24 | 3 | 3 | + | ||
| CAHBPSO versus PSO | 419 | 46 | 23 | 6 | 1 | + | ||
| CAHBPSO versus HPSOBOA | 330 | 153 | 18 | 12 | 0 | + | ||
| 30 | CAHBPSO versus SHADE | 457 | 8 | 29 | 1 | 0 | + | |
| CAHBPSO versus FA | 465 | 0 | 30 | 0 | 0 | + | ||
| CAHBPSO versus BOA | 396 | 69 | 24 | 0 | 6 | + | ||
| CAHBPSO versus PSO | 424 | 41 | 22 | 5 | 3 | + | ||
| CAHBPSO versus HPSOBOA | 234 | 231 | 13 | 17 | 0 | ≈ | ||
| 50 | CAHBPSO versus SHADE | 441 | 24 | 29 | 1 | 0 | + | |
| CAHBPSO versus FA | 465 | 0 | 30 | 0 | 0 | + | ||
| CAHBPSO versus BOA | 387 | 78 | 24 | 0 | 6 | + | ||
| CAHBPSO versus PSO | 391 | 74 | 20 | 7 | 3 | + | ||
| CAHBPSO versus HPSOBOA | 184 | 181 | 15 | 15 | 0 | ≈ | ||
| 100 | CAHBPSO versus SHADE | 465 | 0 | 30 | 0 | 0 | + | |
| CAHBPSO versus FA | 465 | 0 | 30 | 0 | 0 | + | ||
| CAHBPSO versus BOA | 389 | 76 | 23 | 1 | 6 | + | ||
| CAHBPSO versus PSO | 398 | 67 | 22 | 1 | 7 | + | ||
| CAHBPSO versus HPSOBOA | 238 | 227 | 13 | 17 | 0 | ≈ |
| Algorithm | Mean Ranking | Rank | ||||
|---|---|---|---|---|---|---|
| CAHBPSO | 1.77 | 2.07 | 1.97 | 2.07 | 1.97 | 1 |
| HPSOBOA | 3.40 | 2.57 | 3.00 | 2.47 | 2.86 | 2 |
| PSO | 2.97 | 2.97 | 2.87 | 3.00 | 2.95 | 3 |
| BOA | 3.30 | 3.60 | 3.50 | 3.57 | 3.49 | 4 |
| SHADE | 3.83 | 4.03 | 3.97 | 4.07 | 3.98 | 5 |
| FA | 5.73 | 5.77 | 5.70 | 5.83 | 5.76 | 6 |
| Friedman p value |
| SDP | PSO | BOA | CAHBPSO | |
|---|---|---|---|---|
| Scenario 1 | ||||
| Scenario 2 | ||||
| Scenario 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosić, M.; Sedak, M.; Simić, M.; Pejović, P. Chaos-Enhanced Adaptive Hybrid Butterfly Particle Swarm Optimization Algorithm for Passive Target Localization. Sensors 2022, 22, 5739. https://doi.org/10.3390/s22155739
Rosić M, Sedak M, Simić M, Pejović P. Chaos-Enhanced Adaptive Hybrid Butterfly Particle Swarm Optimization Algorithm for Passive Target Localization. Sensors. 2022; 22(15):5739. https://doi.org/10.3390/s22155739
Chicago/Turabian StyleRosić, Maja, Miloš Sedak, Mirjana Simić, and Predrag Pejović. 2022. "Chaos-Enhanced Adaptive Hybrid Butterfly Particle Swarm Optimization Algorithm for Passive Target Localization" Sensors 22, no. 15: 5739. https://doi.org/10.3390/s22155739
APA StyleRosić, M., Sedak, M., Simić, M., & Pejović, P. (2022). Chaos-Enhanced Adaptive Hybrid Butterfly Particle Swarm Optimization Algorithm for Passive Target Localization. Sensors, 22(15), 5739. https://doi.org/10.3390/s22155739