
Validation of a Sensor-Based Dynamic Ski Deflection Measurement in the Lab and Proof-of-Concept Field Investigation

 ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Further Developed PyzoFlex® Prototype for the Detection of the Local Ski Bending Curvature
2.2. Reliability and Validity Assessment in the Laboratory
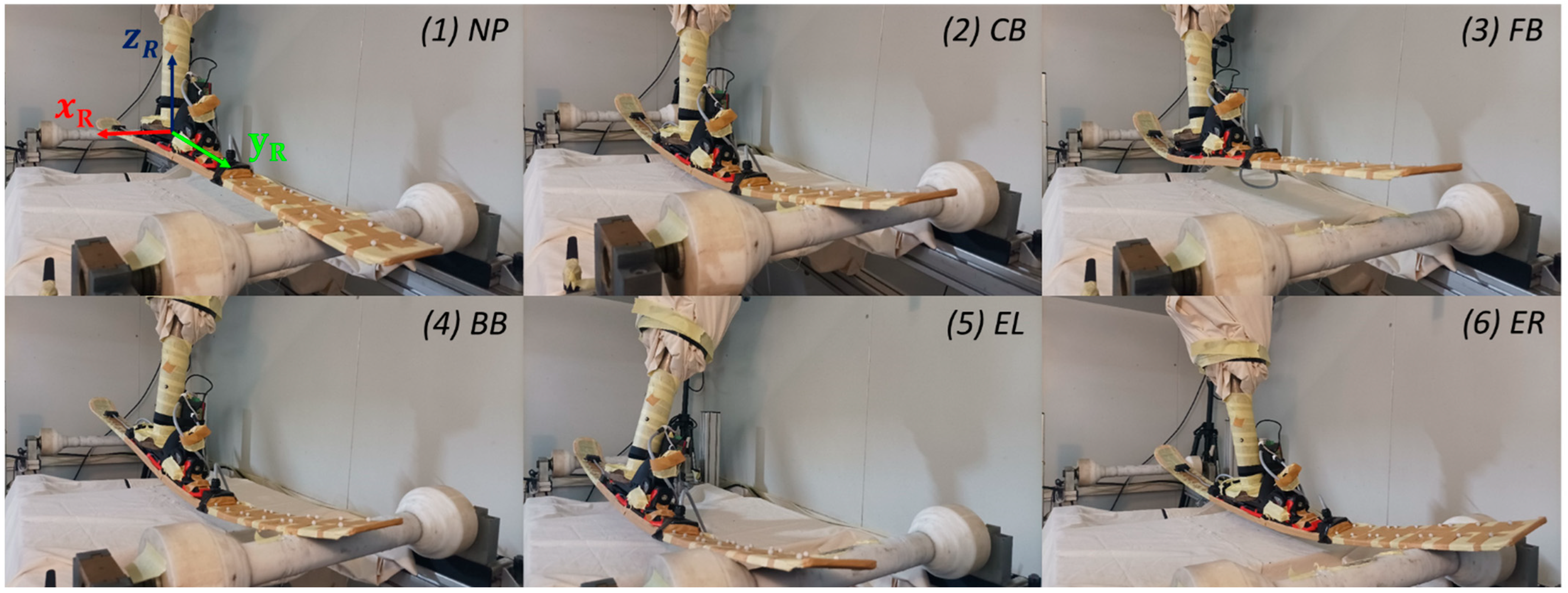
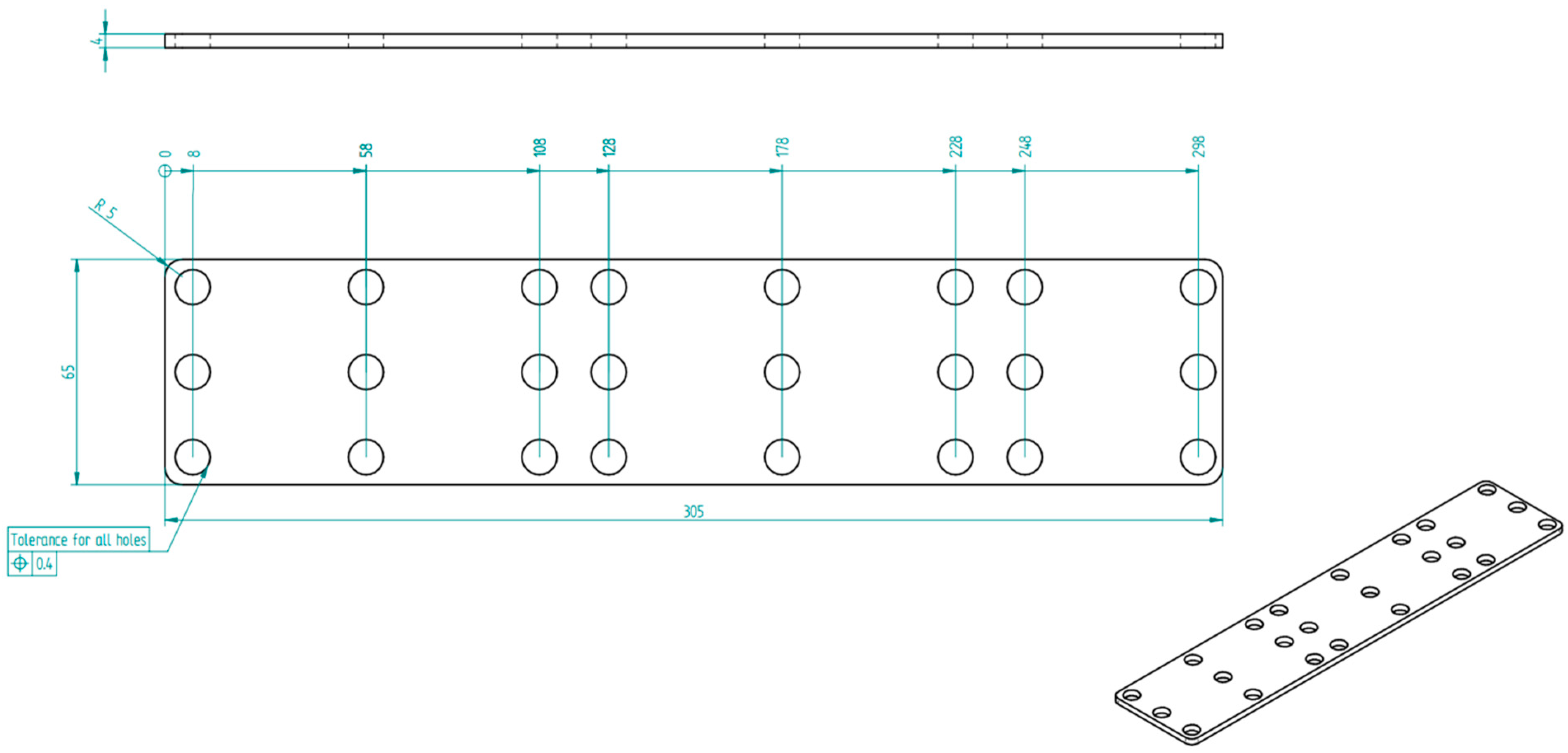
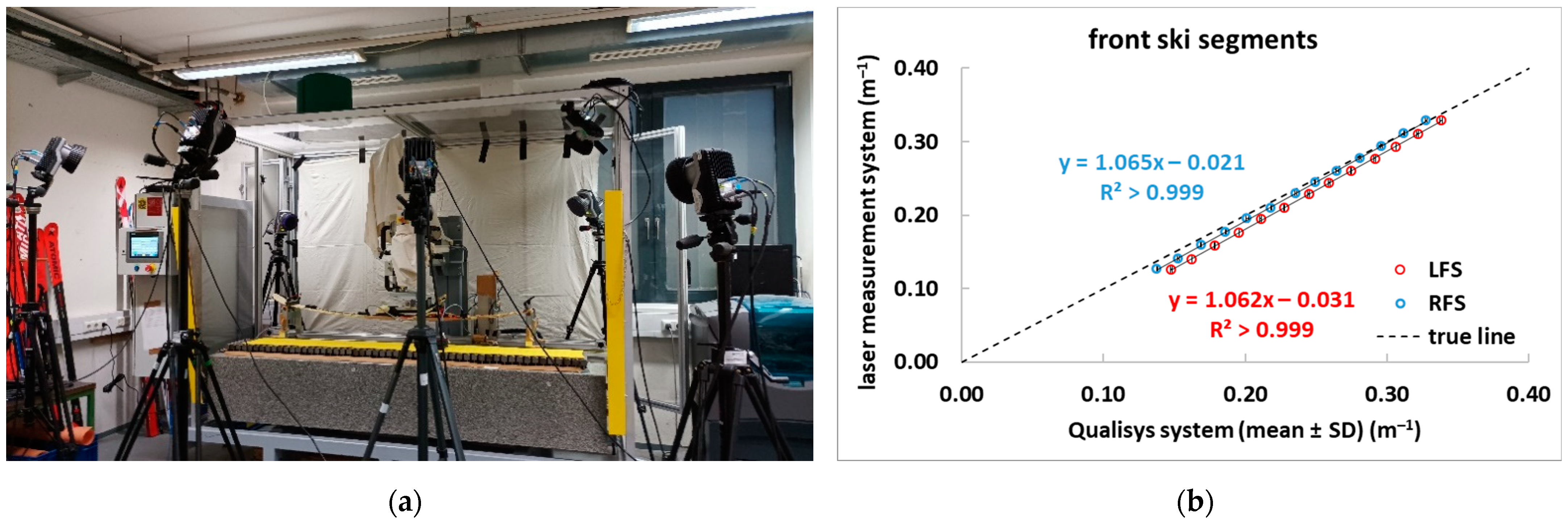
2.2.1. Experimental Setup
2.2.2. Data Processing–Motion Capture System
2.2.3. Data Processing—PyzoFlex® Sensor System
2.2.4. Statistical Analysis
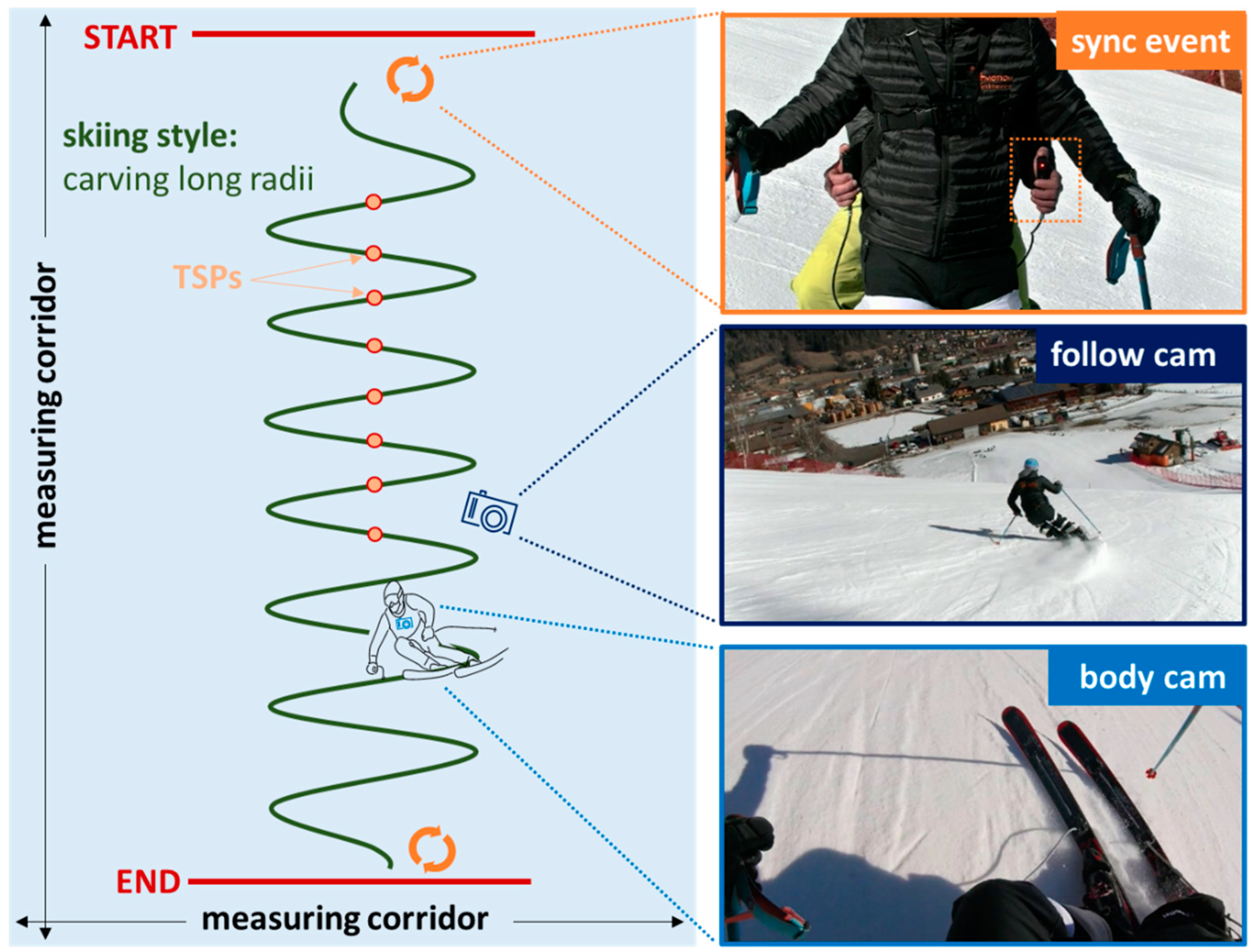
2.3. Proof-of-Concept Field Measurement
3. Results
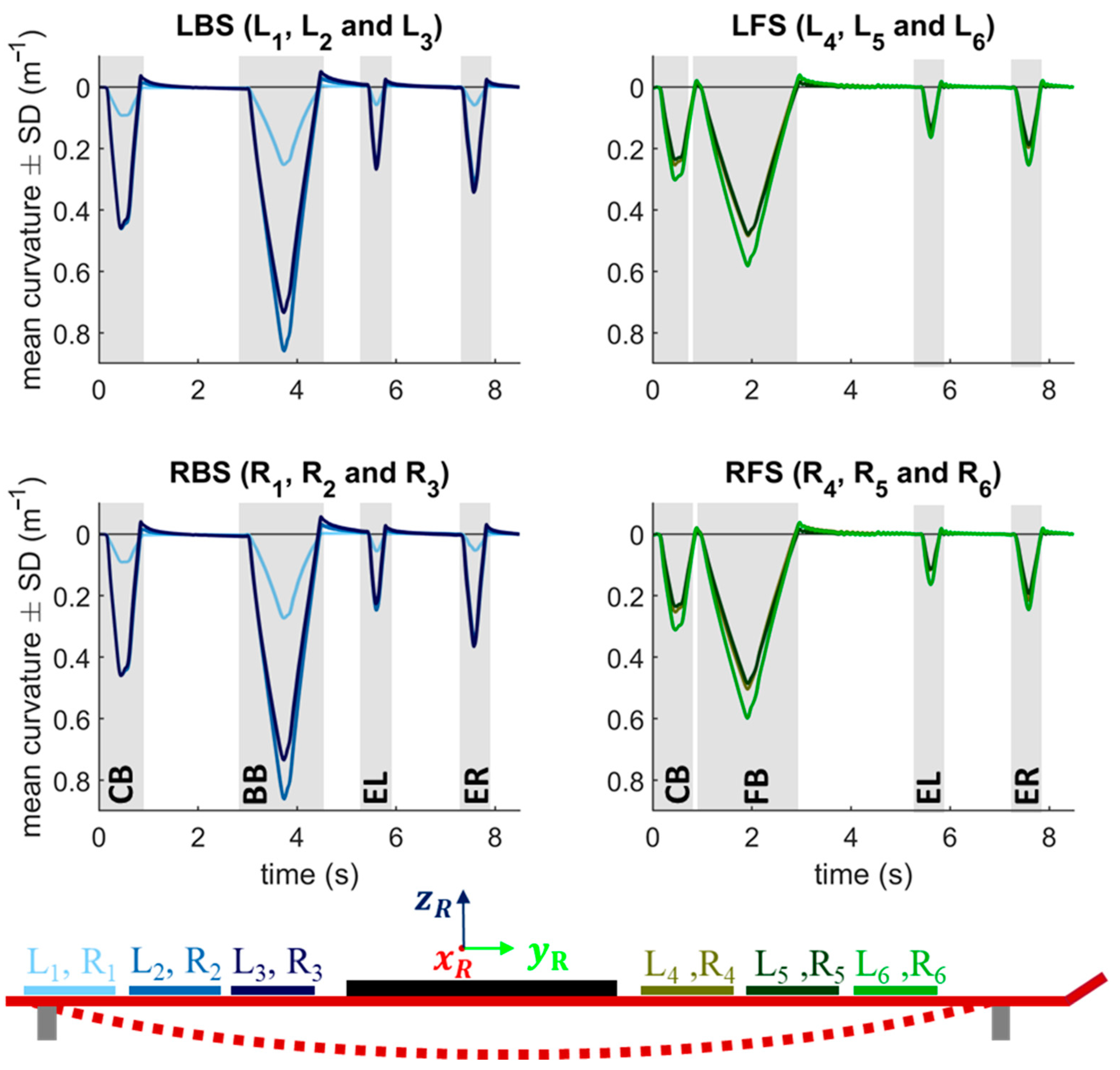
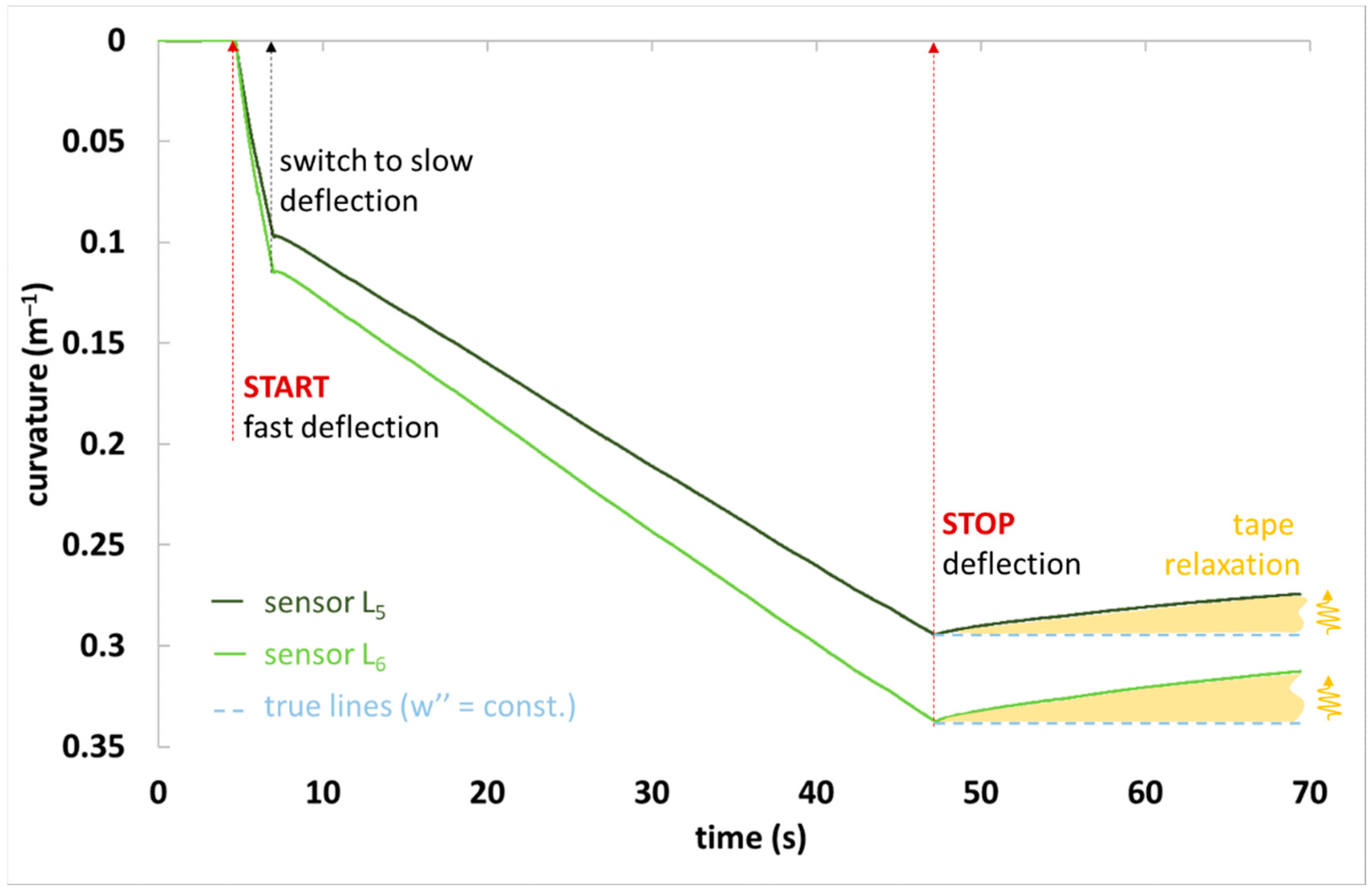
3.1. Descriptive Report of Lab Data
3.2. Instrument Reliability and Accuracy
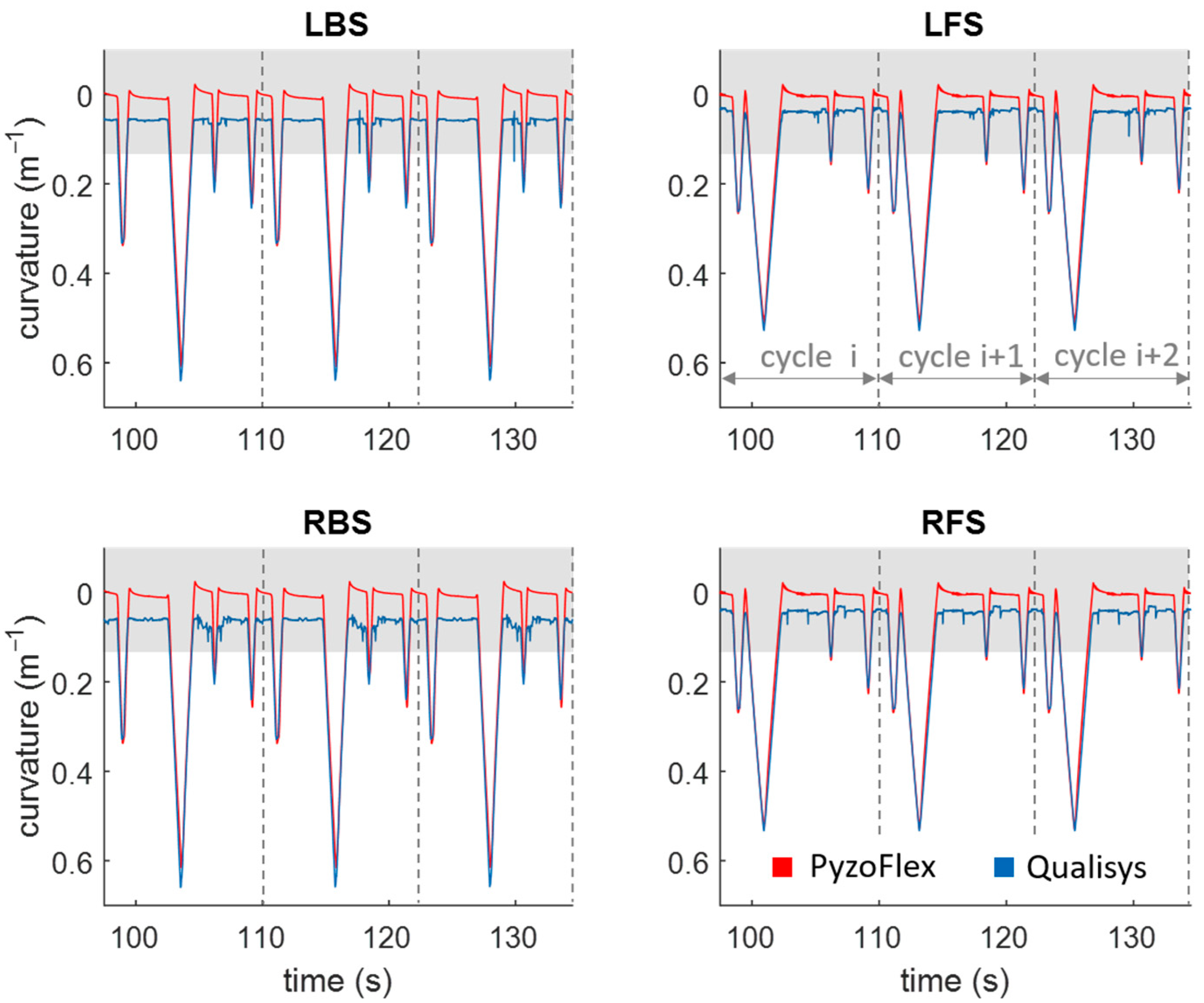
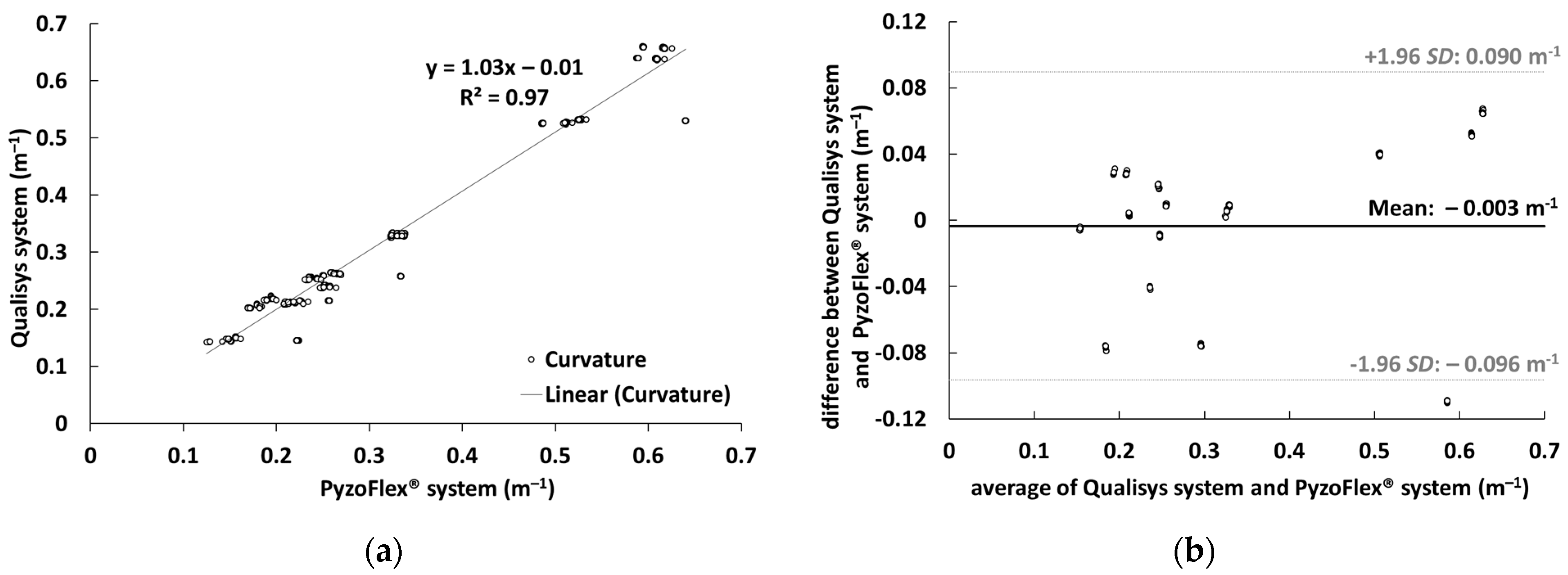
3.3. Criterion Validity
3.4. Proof-of-Concept Field Measurement
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A



References
- Lieu, D.; Mote, C. Mechanics of the turning snow ski. In Skiing Trauma and Safety: Fifth International Symposium; Johnson, R.J., Mote, C.D., Eds.; ASTM International: Philadelphia, PA, USA, 1985; Volume 1, pp. 117–140. [Google Scholar]
- Renshaw, A.A.; Mote, C., Jr. A model for the turning snow ski. Int. J. Mech. Sci. 1989, 31, 721–736. [Google Scholar] [CrossRef]
- Reid, R.C.; Haugen, P.; Gilgien, M.; Kipp, R.W.; Smith, G.A. Alpine Ski Motion Characteristics in Slalom. Front. Sports Act. Living 2020, 2, 25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brown, C.; Outwater, J.O. On the skiability of snow. In Skiing Trauma and Safety: Seventh International Symposium, ASTM STP 1022; Johnson, R., Mote, C., Binet, M., Eds.; ASTM International: Philadelphia, PA, USA, 1989; Volume 1, pp. 329–336. [Google Scholar]
- Federolf, P.; Roos, M.; Lüthi, A.; Dual, J. Finite element simulation of the ski–snow interaction of an alpine ski in a carved turn. Sports Eng. 2010, 12, 123–133. [Google Scholar] [CrossRef]
- Adelsberger, R.; Aufdenblatten, S.; Gilgien, M.; Tröster, G. On bending characteristics of skis in use. Procedia Eng. 2014, 72, 362–367. [Google Scholar] [CrossRef] [Green Version]
- Thorwartl, C.; Kröll, J.; Tschepp, A.; Schäffner, P.; Holzer, H.; Stöggl, T. A novel sensor foil to measure ski deflections: Development and validation of a curvature model. Sensors 2021, 21, 4848. [Google Scholar] [CrossRef]
- Nachbauer, W.; Rainer, F.; Schindelwig, K. Effects of ski stiffness on ski performance. In Proceedings of the Engineering of Sport 5, Winfield, IL, USA, 13–16 September 2004; pp. 472–478. [Google Scholar]
- Rainer, F.; Nachbauer, W.; Schindelwig, K.; Kaps, P. On the measurement of the stiffness of skis. In Science and Skiing III; Müller, E., Bacharach, D., Klika, R., Eds.; Meyer & Meyer Sport: Aachen, Germany, 2005; Volume 1, pp. 136–147. [Google Scholar]
- Deak, A.; Jorgensen, J.; Vagners, J. The engineering characteristics of snow skis—part 1: Static bending and torsional characteristics. J. Eng. Ind. 1975, 97, 131–137. [Google Scholar] [CrossRef]
- Lüthi, A.; Federolf, P.; Fauve, M.; Rhyner, H. Effect of bindings and plates on ski mechanical properties and carving performance. In The Engineering of Sport 6; Hubbard, M., Metha, R.D., Pallis, J.M., Eds.; Springer: Winfield, IL, USA, 2006; Volume 1, pp. 299–304. [Google Scholar]
- De Gobbi, M.; Petrone, N. Structural behaviour of slalom skis in bending and torsion (P269). In The Engineering of Sport 7; Estivalet, M., Brisson, P., Eds.; Springer: Paris, France, 2008; Volume 2, pp. 643–652. [Google Scholar]
- Truong, J.; Brousseau, C.; Desbiens, A.L. A Method for Measuring the Bending and Torsional Stiffness Distributions of Alpine Skis. Procedia Eng. 2016, 147, 394–400. [Google Scholar] [CrossRef] [Green Version]
- Clifton, P.; Subic, A.; Mouritz, A. Snowboard stiffness prediction model for any composite sandwich construction. Procedia Eng. 2010, 2, 3163–3169. [Google Scholar] [CrossRef] [Green Version]
- Kagawa, H.; Yoneyama, T.; Tatsuno, D.; Scott, N.; Osada, K. Development of a Measuring System on Ski Deflection and Contacting Snow Pressure in Turns. In Science and Skiing IV; Müller, E., Lindinger, S., Stöggl, T., Eds.; Meyer & Meyer Sport: Aachen, Germany, 2009; Volume 1, pp. 281–291. [Google Scholar]
- Yoneyama, T.; Kitade, M.; Osada, K. Investigation on the ski-snow interaction in a carved turn based on the actual measurement. Procedia Eng. 2010, 2, 2901–2906. [Google Scholar] [CrossRef] [Green Version]
- Tatsuno, D.; Yoneyama, T.; Kagawa, H.; Scott, N.; Osada, K. Measurement of Ski Deflection and Ski-Snow Contacting Pressure in an Actual Ski Turn on the Snow Surface. In Science and Skiing IV; Müller, E., Lindinger, S., Stöggl, T., Eds.; Meyer & Meyer Sport: Aachen, Germany, 2009; Volume 1, pp. 505–515. [Google Scholar]
- Yoneyama, T.; Scott, N.; Kagawa, H.; Osada, K. Ski deflection measurement during skiing and estimation of ski direction and edge angle. Sports Eng. 2008, 11, 3–13. [Google Scholar] [CrossRef]
- Schindelwig, K.; Hellberg, F.; Nachbauer, W.; Schretter, H. Measuring dynamic ski behavior with strain gauges. In Proceedings of the XXIV International Symposium on Biomechanics in Sports, Salzburg, Austria, 14–18 July 2006. [Google Scholar]
- Fauve, M.; Auer, M.; Lüthi, A.; Rhyner, H.; Meier, J. Measurement of Dynamical Ski Behavior during Alpine Skiing. In Science and Skiing IV; Müller, E., Lindinger, S., Stöggl, T., Eds.; Meyer & Meyer Sport: Aachen, Germany, 2009; Volume 1, pp. 195–206. [Google Scholar]
- Kos, A.; Umek, A. Smart sport equipment: SmartSki prototype for biofeedback applications in skiing. Pers. Ubiquitous Comput. 2018, 22, 535–544. [Google Scholar] [CrossRef]
- Umek, A.; Kos, A. Smart equipment design challenges for real time feedback support in sport. Facta Universitatis. Ser. Mech. Eng. 2018, 16, 389–403. [Google Scholar] [CrossRef] [Green Version]
- Yoneyama, T.; Kagawa, H.; Tatsuno, D.; Kitade, M.; Osada, K.; Shigehara, S. Effect of flexural stiffness distribution of a ski on the ski–snow contact pressure in a carved turn. Sports Eng. 2021, 24, 2. [Google Scholar] [CrossRef]
- Thorwartl, C.; Holzer, H.; Kröll, J.; Tschepp, A.; Stöggl, T. Sensor-Based Curvature Detection of Alpine Skis. In Proceedings of the 24th International Congress on Snow Sport Trauma and Safety—37th Congress of the International Society for Snowsports Medicine, Mônetier-les-Bains, France, 21–27 March 2021; p. 58. [Google Scholar]
- Corazza, S.; Mündermann, L.; Gambaretto, E.; Ferrigno, G.; Andriacchi, T.P. Markerless motion capture through visual hull, articulated icp and subject specific model generation. Int. J. Comput. Vis. 2010, 87, 156. [Google Scholar] [CrossRef]
- van der Kruk, E.; Reijne, M.M. Accuracy of human motion capture systems for sport applications; state-of-the-art review. Eur. J. Sport Sci. 2018, 18, 806–819. [Google Scholar] [CrossRef]
- Windolf, M.; Götzen, N.; Morlock, M. Systematic accuracy and precision analysis of video motion capturing systems—exemplified on the Vicon-460 system. J. Biomech. 2008, 41, 2776–2780. [Google Scholar] [CrossRef]
- Monnet, T.; Samson, M.; Bernard, A.; David, L.; Lacouture, P. Measurement of three-dimensional hand kinematics during swimming with a motion capture system: A feasibility study. Sports Eng. 2014, 17, 171–181. [Google Scholar] [CrossRef]
- Gilgien, M.; Spörri, J.; Limpach, P.; Geiger, A.; Müller, E. The effect of different global navigation satellite system methods on positioning accuracy in elite alpine skiing. Sensors 2014, 14, 18433–18453. [Google Scholar] [CrossRef] [Green Version]
- Van der Kruk, E. Modelling and Measuring 3D Movements of a Speed Skater. Master’s Thesis, TU Delft, Delft, The Netherlands, 2013. [Google Scholar]
- Maletsky, L.P.; Sun, J.; Morton, N.A. Accuracy of an optical active-marker system to track the relative motion of rigid bodies. J. Biomech. 2007, 40, 682–685. [Google Scholar] [CrossRef]
- Liu, H.; Holt, C.; Evans, S. Accuracy and repeatability of an optical motion analysis system for measuring small deformations of biological tissues. J. Biomech. 2007, 40, 210–214. [Google Scholar] [CrossRef] [PubMed]
- Thorwartl, C.; Stöggl, T.; Teufl, W.; Holzer, H.; Kröll, J. Curvature Detection with an Optoelectronic Measurement System Using a Self-Made Calibration Profile. Sensors 2022, 22, 51. [Google Scholar] [CrossRef] [PubMed]
- Koo, T.K.; Li, M.Y. A guideline of selecting and reporting intraclass correlation coefficients for reliability research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hopkins, W.G. Spreadsheets for analysis of validity and reliability. Sportscience 2017, 21, 36–44. [Google Scholar]
- Bland, J.M.; Altman, D.G. Measuring agreement in method comparison studies. Stat. Methods Med. Res. 1999, 8, 135–160. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| p (t-Test) | CIM (%, 95% CI) | CV (%, 95% CI) | ICC 3.1 (95% CI) | ||
|---|---|---|---|---|---|
| vslow | cycle 1 vs. 10 | 0.010 | 0.09 (0.00–0.18) | 0.26 (0.22–0.31) | 0.999 (0.999–0.999) |
| cycle 10 vs. 20 | n.s. | 0.01 (−0.06–0.08) | 0.21 (0.18–0.26) | 0.999 (0.999–0.999) | |
| vmedium | cycle 1 vs. 10 | 0.016 | 0.14 (0.05–0.24) | 0.28 (0.24–0.34) | 0.999 (0.999–0.999) |
| cycle 10 vs. 20 | n.s. | −0.01 (-0.08–0.07) | 0.22 (0.19–0.26) | 0.999 (0.999–0.999) | |
| vfast | cycle 1 vs. 10 | <0.001 | 0.24 (0.17–0.31) | 0.21 (0.18–0.25) | 0.999 (0.999–0.999) |
| cycle 10 vs. 20 | <0.001 | −0.69 (-0.75–0.63) | 0.17 (0.15–0.21) | 0.999 (0.999–0.999) |
| p (t-Test) | CIM (%, 95% CI) | CV (%, 95% CI) | ICC 3.1 (95% CI) | ||
|---|---|---|---|---|---|
| Cycle 1, 10 and 20 | vslow vs. vmedium | <0.001 | 1.84 (1.25–2.43) | 3.05 (2.74–3.38) | 0.997 (0.996–0.998) |
| vslow vs. vfast | <0.001 | 3.03 (2.61–3.46) | 2.18 (1.99–2.41) | 0.999 (0.998–0.999) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thorwartl, C.; Kröll, J.; Tschepp, A.; Holzer, H.; Teufl, W.; Stöggl, T. Validation of a Sensor-Based Dynamic Ski Deflection Measurement in the Lab and Proof-of-Concept Field Investigation. Sensors 2022, 22, 5768. https://doi.org/10.3390/s22155768
Thorwartl C, Kröll J, Tschepp A, Holzer H, Teufl W, Stöggl T. Validation of a Sensor-Based Dynamic Ski Deflection Measurement in the Lab and Proof-of-Concept Field Investigation. Sensors. 2022; 22(15):5768. https://doi.org/10.3390/s22155768
Chicago/Turabian StyleThorwartl, Christoph, Josef Kröll, Andreas Tschepp, Helmut Holzer, Wolfgang Teufl, and Thomas Stöggl. 2022. "Validation of a Sensor-Based Dynamic Ski Deflection Measurement in the Lab and Proof-of-Concept Field Investigation" Sensors 22, no. 15: 5768. https://doi.org/10.3390/s22155768
APA StyleThorwartl, C., Kröll, J., Tschepp, A., Holzer, H., Teufl, W., & Stöggl, T. (2022). Validation of a Sensor-Based Dynamic Ski Deflection Measurement in the Lab and Proof-of-Concept Field Investigation. Sensors, 22(15), 5768. https://doi.org/10.3390/s22155768