
Optical Fiber Vibration Signal Recognition Based on the Fusion of Multi–Scale Features

Abstract
:1. Introduction
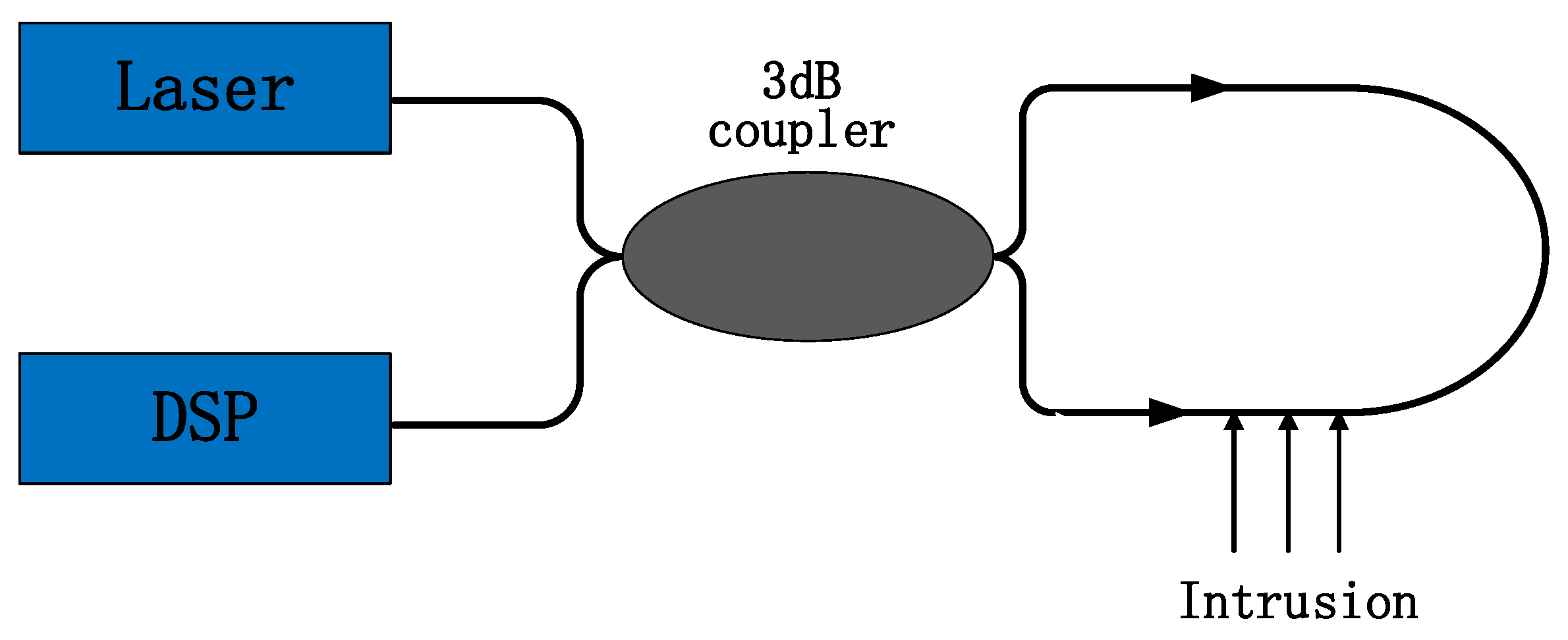
2. Distributed Sagnac Interferometer Fiber Sensing Technology
3. The Proposed Construction Method
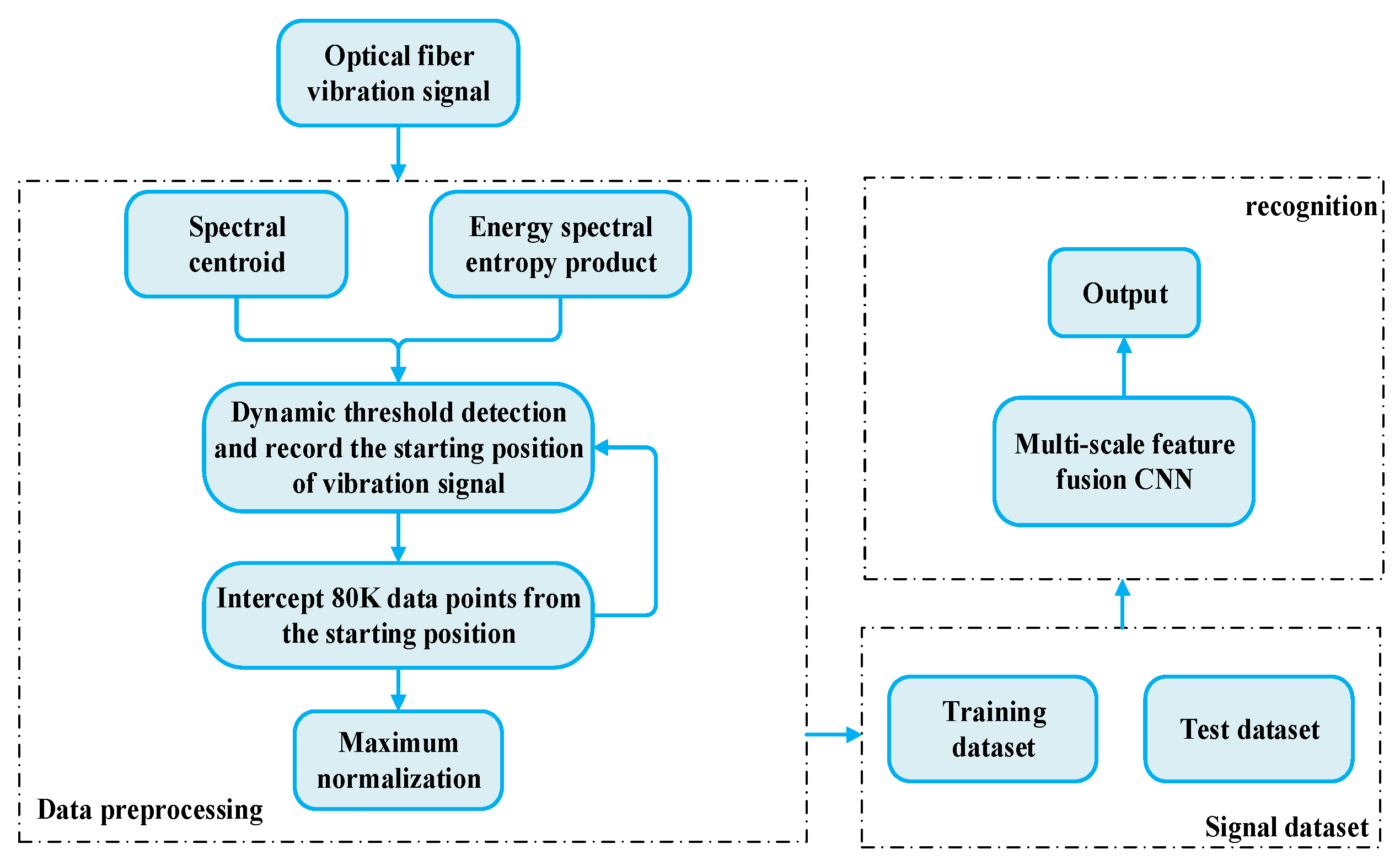
3.1. Data Preprocessing
- (1)
- Framing the vibration signal. Since the signal after framing has the problem of energy leakage, in order to reduce the energy leakage, the framed part is windowed, and the Hamming window can be used to effectively reduce the energy leakage.
- (2)
- Calculate the spectral centroid of each frame of signal. The spectral centroid is the center of gravity of the spectrum. This feature is used to measure the position of the spectrum. Let the spectral centroid of the i–th frame be , and the calculation formula of the obtained spectral centroid feature is:where is the discrete Fourier transform of the i–th frame and N is the frame length.
- (3)
- Calculate the short–term energy of each frame of signal, set the short–term energy of the i–th frame as , and the short–term energy calculation formula is:where is the signal of the i–th frame and N is the frame length. Calculate the spectral entropy of each frame of signal, set the spectral entropy of the i–th frame to be , and the spectral entropy calculation formula is:
- (4)
- Median filtering is performed for the two feature sequences and a threshold is dynamically estimated, the histogram of each feature sequence is calculated and smoothed, and the local maximum value of the histogram is detected. Let and be the local maximum and sub–local maximum, respectively, and is the parameter estimated by the threshold, then the calculation formula of the threshold is:
- (5)
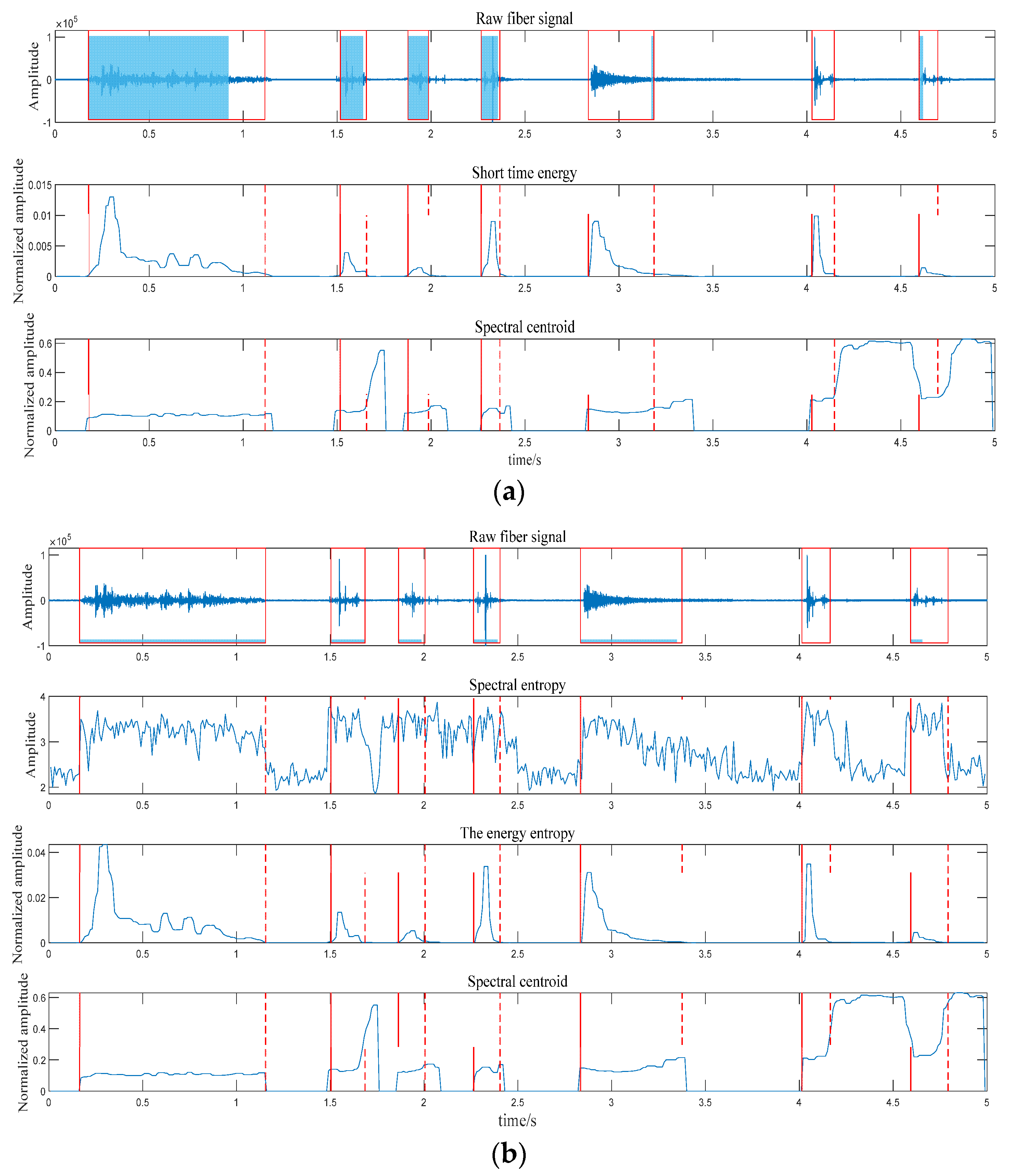
- Use the thresholds of the two feature sequences to perform threshold judgment on each frame of signal. Suppose the spectral centroid threshold of the frame signal and the energy spectrum entropy product thresholds are, respectively, greater than the estimated feature sequence thresholds; the segment of the signal is considered to be a valid signal. According to the relationship between the frame and the frameshift, the position of the frame in the original signal is obtained. The comparison chart of different endpoint detection is shown in Figure 4; where (a) is the endpoint detection method of ordinary spectral entropy and short–term energy; and (b) is the endpoint detection method based on the combination of spectral centroid and energy spectral entropy product. Experiments show that the endpoint detection algorithm combining spectral centroid and energy spectral entropy product combines their respective advantages, reduces false alarms, and can effectively detect weak vibration signals to achieve accurate endpoint detection for various vibration signals.
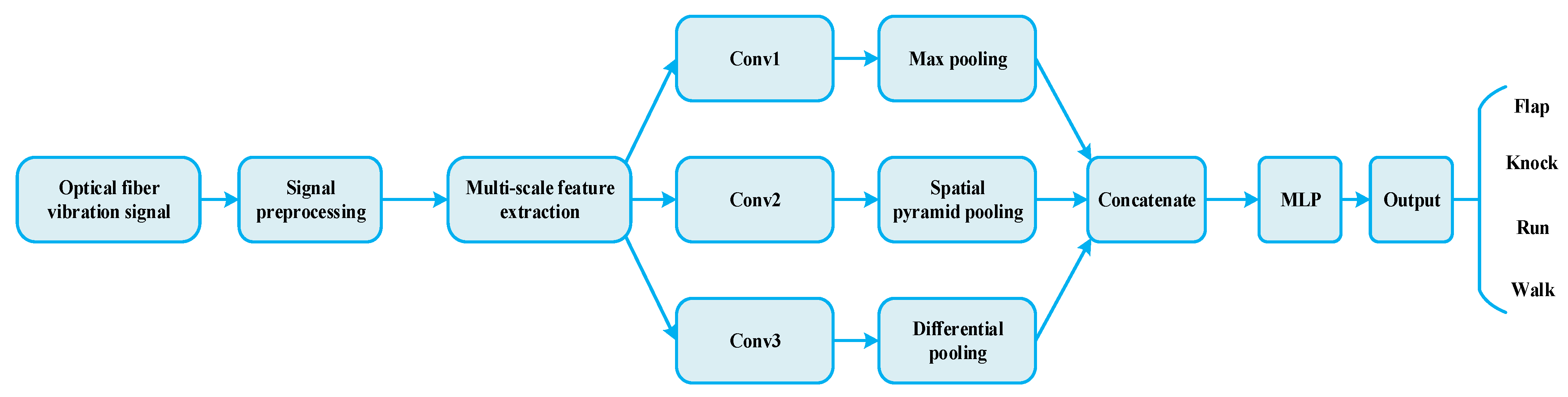
3.2. Network Construction
3.2.1. Multiscale Feature Extraction
3.2.2. Differential Pooling Structure
4. Experiment and Analysis
4.1. Network Training and Testing
4.2. Experimental Comparison and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xue, X.; Sun, Q.; Ma, Q.; Wang, J. A Versatile Model for Describing Energy Harvesting Characteristics of Composite-Laminated Piezoelectric Cantilever Patches. Sensors 2022, 22, 4457. [Google Scholar] [CrossRef] [PubMed]
- Hornman, J.C. Field Trial of Seismic Recording Using Distributed Acoustic Sensing with Broadside Sensitive Fibre-Optic Cables: Field Trial of Seismic Recording. Geophys. Prospect. 2017, 65, 35–46. [Google Scholar] [CrossRef]
- Min, R.; Liu, Z.; Pereira, L.; Yang, C.; Sui, Q.; Marques, C. Optical Fiber Sensing for Marine Environment and Marine Structural Health Monitoring: A Review. Opt. Laser Technol. 2021, 140, 107082. [Google Scholar] [CrossRef]
- Wang, N.; Fang, N.; Wang, L. Intrusion Recognition Method Based on Echo State Network for Optical Fiber Perimeter Security Systems. Opt. Commun. 2019, 451, 301–306. [Google Scholar] [CrossRef]
- Bi, F.; Feng, C.; Qu, H.; Zheng, T.; Wang, C. Harmful Intrusion Detection Algorithm of Optical Fiber Pre-Warning System Based on Correlation of Orthogonal Polarization Signals. Photonic. Sens. 2017, 7, 226–233. [Google Scholar] [CrossRef]
- Meng, H.; Wang, S.; Gao, C.; Liu, F. Research on Recognition Method of Railway Perimeter Intrusions Based on Φ-OTDR Optical Fiber Sensing Technology. IEEE Sens. J. 2021, 21, 9852–9859. [Google Scholar] [CrossRef]
- Lyu, C.; Huo, Z.; Liu, Y.; Cheng, X.; Jiang, J.; Alimasi, A.; Yang, J.; Su, H. Robust Intrusion Events Recognition Methodology for Distributed Optical Fiber Sensing Perimeter Security System. IEEE Trans. Instrum. Meas. 2021, 70, 9505109. [Google Scholar] [CrossRef]
- Ruan, S.; Mo, J.; Xu, L.; Zhou, G.; Liu, Y.; Zhang, X. Use AF-CNN for End-to-End Fiber Vibration Signal Recognition. IEEE Access 2021, 9, 6713–6720. [Google Scholar] [CrossRef]
- Wang, B.; Sun, Q.; Pi, S.; Wu, W. Research on the Feature Extraction and Pattern Recognition of the Distributed Optical Fiber Sensing Signal. Proc. SPIE 2014, 9193, 63–74. [Google Scholar] [CrossRef]
- Qian, H.; Luo, B.; He, H.; Zhou, Y.; Hu, C.; Zou, X.; Pan, W.; Yan, L. Fading-Free Φ-OTDR With Multi-Frequency Decomposition. IEEE Sens. J. 2022, 22, 2160–2166. [Google Scholar] [CrossRef]
- Liu, K.; Tian, M.; Liu, T.; Jiang, J.; Ding, Z.; Chen, Q.; Ma, C.; He, C.; Hu, H.; Zhang, X. A High-Efficiency Multiple Events Discrimination Method in Optical Fiber Perimeter Security System. J. Lightwave Technol. 2015, 33, 4885–4890. [Google Scholar] [CrossRef]
- Xiao, Q.; Li, J.; Sun, J.; Feng, H.; Jin, S. Natural-Gas Pipeline Leak Location Using Variational Mode Decomposition Analysis and Cross-Time-Frequency Spectrum. Measurement 2018, 124, 163–172. [Google Scholar] [CrossRef]
- Li, Z.; Chen, J.; Zi, Y.; Pan, J. Independence-Oriented VMD to Identify Fault Feature for Wheel Set Bearing Fault Diagnosis of High Speed Locomotive. Mech. Syst. Signal Processing 2017, 85, 512–529. [Google Scholar] [CrossRef]
- Tangudu, R.; Sahu, P.K. Rayleigh Φ-OTDR Based DIS System Design Using Hybrid Features and Machine Learning Algorithms. Opt. Fiber Technol. 2021, 61, 102405. [Google Scholar] [CrossRef]
- Wei, H.; Wang, M.; Song, B.; Wang, X.; Chen, D. Study on the Magnitude of Reservoir-Triggered Earthquake Based on Support Vector Machines. Complexity 2018, 2018, 2830690. [Google Scholar] [CrossRef]
- Wu, H.; Chen, J.; Liu, X.; Xiao, Y.; Wang, M.; Zheng, Y.; Rao, Y. One-Dimensional CNN-Based Intelligent Recognition of Vibrations in Pipeline Monitoring With DAS. J. Lightwave Technol. 2019, 37, 4359–4366. [Google Scholar] [CrossRef]
- Fouda, B.M.T.; Yang, B.; Han, D.; An, B. Pattern Recognition of Optical Fiber Vibration Signal of the Submarine Cable for Its Safety. IEEE Sensors J. 2021, 21, 6510–6519. [Google Scholar] [CrossRef]
- Chen, P.; You, C.; Ding, P. Event Classification Using Improved Salp Swarm Algorithm Based Probabilistic Neural Network in Fiber-Optic Perimeter Intrusion Detection System. Opt. Fiber Technol. 2020, 56, 102182. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Wang, L.; Zhao, L.; Fan, Z. Multi-Event Classification for Φ-OTDR Distributed Optical Fiber Sensing System Using Deep Learning and Support Vector Machine. Optik 2020, 221, 165373. [Google Scholar] [CrossRef]
- Xu, C.; Guan, J.; Bao, M.; Lu, J.; Ye, W. Pattern Recognition Based on Enhanced Multifeature Parameters for Vibration Events in φ-OTDR Distributed Optical Fiber Sensing System. Microw. Opt. Technol. Lett. 2017, 59, 3134–3141. [Google Scholar] [CrossRef]
- Tabi Fouda, B.M.; Han, D.; An, B.; Lu, X.; Tian, Q. Events Detection and Recognition by the Fiber Vibration System Based on Power Spectrum Estimation. Adv. Mech. Eng. 2018, 10, 168781401880867. [Google Scholar] [CrossRef]
- Sun, Z.; Liu, K.; Jiang, J.; Ma, P.; Xu, Z.; Guo, H.; Zhou, Z.; Liu, T. Variational Mode Decomposition-Based Event Recognition in Perimeter Security Monitoring with Fiber Optic Vibration Sensor. IEEE Access 2019, 7, 182580–182587. [Google Scholar] [CrossRef]
- Yap, A.; Vo, T.; Wijaya, H. Fiber Optic Acoustic Sensor Based on the Sagnac Interferometer. In Proceedings of the Pacific Northwest Fiber Optic Sensor Workshop, Troutdale, OR, USA, 3–4 May 1995; Volume 2574, p. 87. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, H.; Liu, X.; Bai, Q.; Zhang, H.; Gao, Y.; Jin, B. A Comprehensive Study of Optical Fiber Acoustic Sensing. IEEE Access 2019, 7, 85821–85837. [Google Scholar] [CrossRef]
- Huang, X.; Wang, Y.; Liu, K.; Liu, T.; Ma, C.; Tian, M. High-Efficiency Endpoint Detection in Optical Fiber Perimeter Security. J. Lightwave Technol. 2016, 34, 5049–5055. [Google Scholar] [CrossRef]
- Bao, J.; Mo, J.; Xu, L.; Liu, Y.; Lv, X. VMD-Based Vibrating Fiber System Intrusion Signal Recognition. Optik 2020, 205, 163753. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Hershey, S.; Chaudhuri, S.; Ellis, D.P.W.; Gemmeke, J.F.; Jansen, A.; Moore, R.C.; Plakal, M.; Platt, D.; Saurous, R.A.; Seybold, B.; et al. CNN Architectures for Large-Scale Audio Classification. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 131–135. [Google Scholar] [CrossRef]
- Huang, J.; Chen, B.; Yao, B.; He, W. ECG Arrhythmia Classification Using STFT-Based Spectrogram and Convolutional Neural Network. IEEE Access 2019, 7, 92871–92880. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef]
- Chang, Z.; Zhang, Y.; Chen, W. Effective Adam-Optimized LSTM Neural Network for Electricity Price Forecasting. In Proceedings of the 2018 IEEE 9th International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 23–25 November 2018; pp. 245–248. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Branch | Second Branch | Third Branch | ||||
|---|---|---|---|---|---|---|
| Input | - | 3@224 × 224 | - | 3@224 × 224 | - | 3@224 × 224 |
| C1 | 16@5 × 5 | 16@220 × 220 | 16@3 × 3 | 16@222 × 222 | 16@1 × 1 | 16@224 × 224 |
| P1 | 2 × 2 | 16@110 × 110 | 2 × 2 | 16@111 × 111 | 2 × 2 | 16@112 × 112 |
| C2 | 128@3 × 3 | 128@54 × 54 | 128@3 × 3 | 128@55 × 55 | 128@3 × 3 | 128@111 × 111 |
| P2 | 2 × 2 | 128@27 × 27 | 2 × 2 | 128@27 × 27 | - | - |
| C3 | 64@3 × 3 | 64@13 × 13 | 64@3 × 3 | 64@13 × 13 | 64@55 × 55 | |
| P3 | - | - | Spatial pooling | - | - | |
| C4 | - | - | 16@13 × 13 | 16@13 × 13 | - | 128@55 × 55 |
| - | - | - | 16@13 × 13 | 16@13 × 13 | - | - |
| - | - | 64@13 × 13 | 16@13 × 13 | - | - | |
| Concatenation | ||||||
| Dense layer | 64 neurons + dropout | |||||
| Output | 4 neurons | |||||
| NO. | Network | Description | Main Features |
|---|---|---|---|
| 1 | First–CNN | 2D Standard Convolutional Neural Network | Network with standard convolutional kernel and maximum pooling and a fully connected layer in the last layer. |
| 2 | Second–CNN | 2D–CNN–Spatial pooling–FC | The first layer of the network uses standard convolution kernels and max pooling, and the last layer uses spatial pyramid pooling. |
| 3 | FS–CNN | Parallel–2D–CNN–FC | The first channel CNN adopts normal network and max pooling, and the second channel CNN adopts spatial pyramid pooling. |
| Method Classification | First–CNN | Second–CNN | FS–CNN | Fusion–CNN |
|---|---|---|---|---|
| Knock signal | 71.43% | 75.0% | 89.08% | 99.07% |
| Flap signal | 98.40% | 98.36% | 98.15% | 99.02% |
| Walk signal | 100% | 98.33% | 96.43% | 99.18% |
| Run signal | 78.46% | 80.0% | 97.54% | 97.73% |
| Average accuracy | 87.07% | 87.92% | 95.30% | 98.75% |
| Parameters | 1.49 M | 1.56 M | 1.92 M | 2.68 M |
| Method Classification | EMD | VMD | 1D–CNN | Fusion–CNN |
|---|---|---|---|---|
| Knock signal | 90.0% | 99.33% | 93.44% | 99.07% |
| Flap signal | 100% | 100% | 94.64% | 99.02% |
| Walk signal | 71.62% | 95.95% | 100% | 99.18% |
| Run signal | 56.14% | 73.60% | 98.46% | 97.73% |
| Average accuracy | 79.44% | 92.22% | 96.64% | 98.75% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, X.; Mo, J.; Zhang, J.; Huang, J. Optical Fiber Vibration Signal Recognition Based on the Fusion of Multi–Scale Features. Sensors 2022, 22, 6012. https://doi.org/10.3390/s22166012
Ma X, Mo J, Zhang J, Huang J. Optical Fiber Vibration Signal Recognition Based on the Fusion of Multi–Scale Features. Sensors. 2022; 22(16):6012. https://doi.org/10.3390/s22166012
Chicago/Turabian StyleMa, Xinrong, Jiaqing Mo, Jiangwei Zhang, and Jincheng Huang. 2022. "Optical Fiber Vibration Signal Recognition Based on the Fusion of Multi–Scale Features" Sensors 22, no. 16: 6012. https://doi.org/10.3390/s22166012
APA StyleMa, X., Mo, J., Zhang, J., & Huang, J. (2022). Optical Fiber Vibration Signal Recognition Based on the Fusion of Multi–Scale Features. Sensors, 22(16), 6012. https://doi.org/10.3390/s22166012