
Motion Analysis of Football Kick Based on an IMU Sensor


Abstract
:1. Introduction
1.1. Related Work
1.1.1. IMU in Sports
1.1.2. Football-Related Motion Analysis
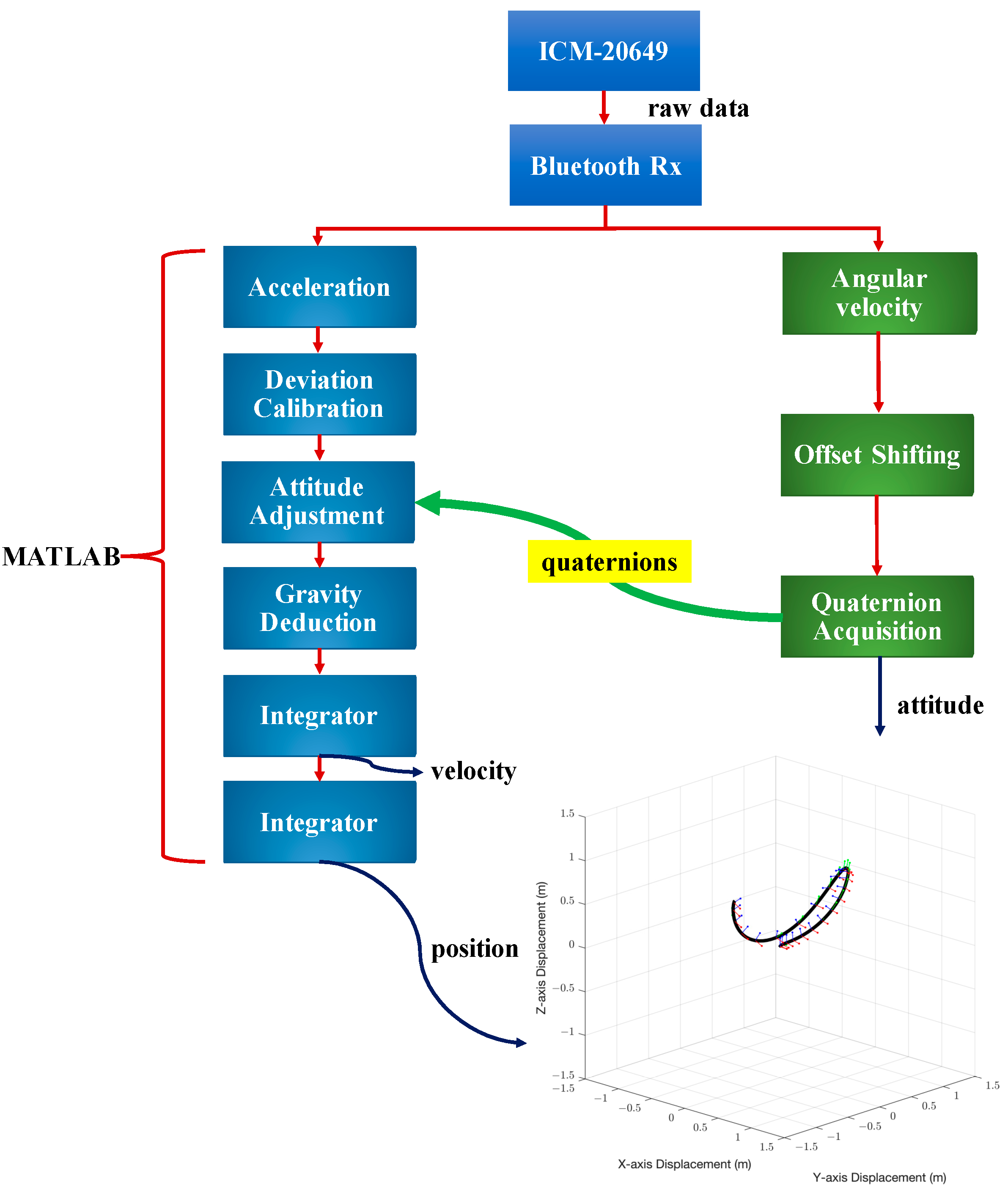
2. Methodology
2.1. Data Collection and Deviation Calibration
2.2. Attitude Estimation with Quaternion
2.3. Gravity Compensation
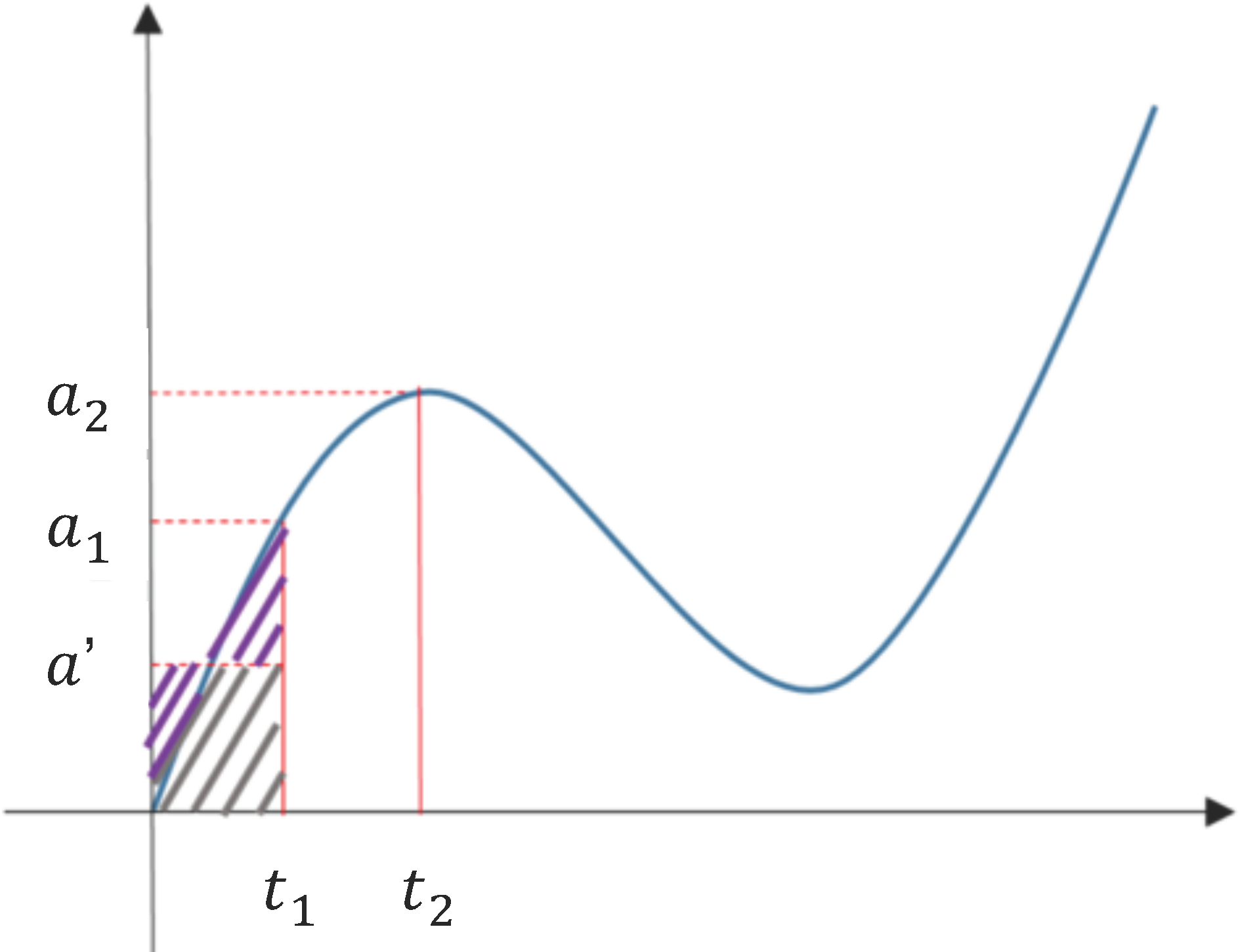
2.4. Quadratic Integration and Threshold Setting
3. Results
3.1. Experimental Setup
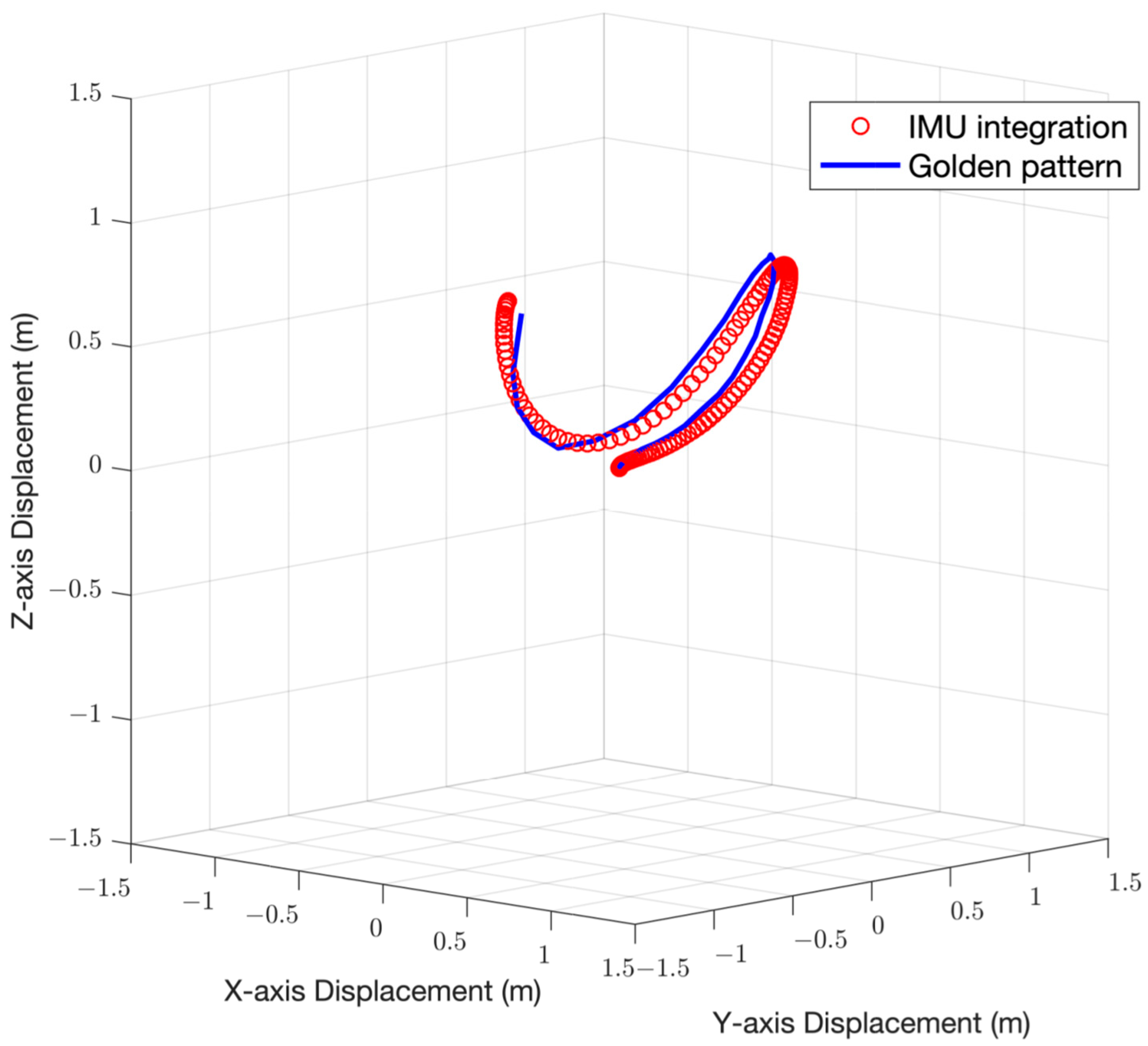
3.2. Experimental Results
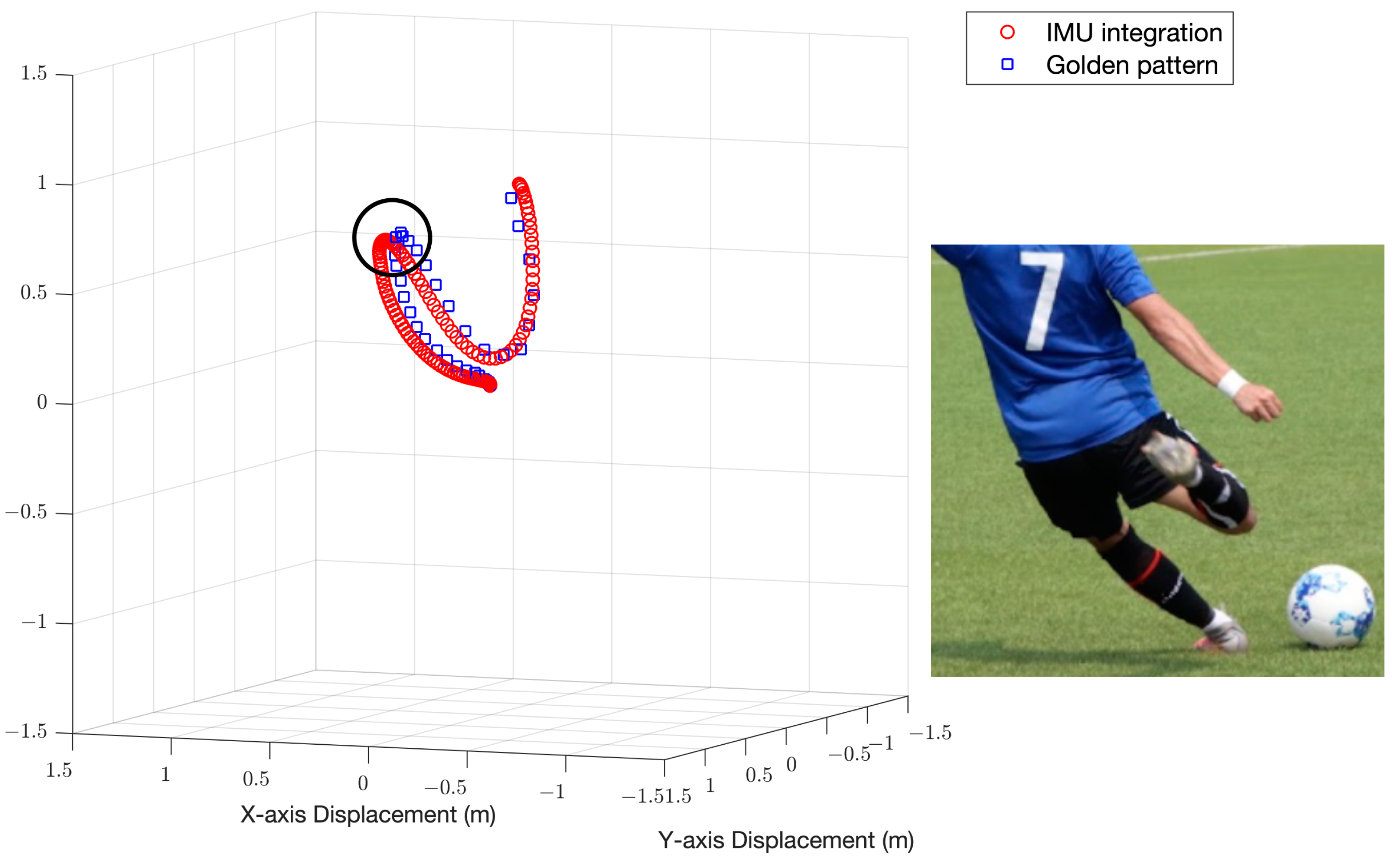
Motion Trajectory Analysis
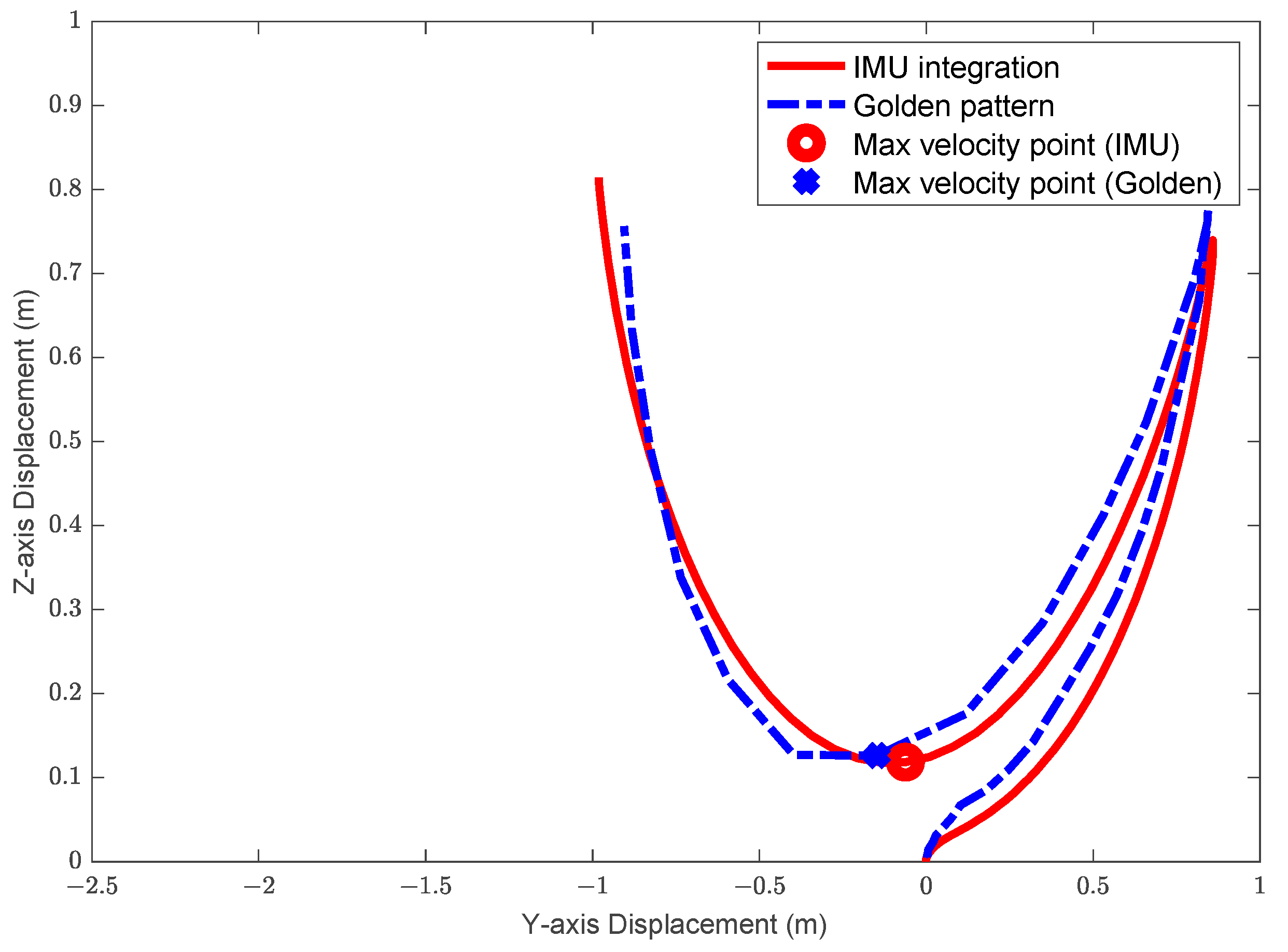
3.3. Foot Velocity Analysis
3.4. Backswing Height Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Bailey, G.P.; Harle, R. Assessment of foot kinematics during steady state running using a foot-mounted IMU. Procedia Eng. 2014, 72, 32–37. [Google Scholar] [CrossRef]
- Schmidt, M.; Rheinländer, C.; Nolte, K.F.; Wille, S.; Wehn, N.; Jaitner, T. IMU-based determination of stance duration during sprinting. Procedia Eng. 2016, 147, 747–752. [Google Scholar] [CrossRef]
- Yuan, Q.; Chen, I.M. Human velocity and dynamic behavior tracking method for inertial capture system. Sens. Actuators A Phys. 2012, 183, 123–131. [Google Scholar] [CrossRef]
- Yuan, Q.; Chen, I.M. Localization and velocity tracking of human via 3 IMU sensors. Sens. Actuators A Phys. 2014, 212, 25–33. [Google Scholar] [CrossRef]
- Rawashdeh, S.A.; Rafeldt, D.A.; Uhl, T.L. Wearable IMU for shoulder injury prevention in overhead sports. Sensors 2016, 16, 1847. [Google Scholar] [CrossRef]
- Lapinski, M.; Medeiros, C.B.; Scarborough, D.M.; Berkson, E.; Gill, T.J.; Kepple, T.; Paradiso, J.A. A wide-range, wireless wearable inertial motion sensing system for capturing fast athletic biomechanics in overhead pitching. Sensors 2019, 19, 3637. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, J.; Zhang, Y.; Zhu, R. A wearable motion capture device able to detect dynamic motion of human limbs. Nat Commun. 2020, 11, 5615. [Google Scholar] [CrossRef]
- Nguyen, L.N.N.; Rodríguez-Martín, D.; Català, A.; Pérez-López, C.; Samà, A.; Cavallaro, A. Basketball Activity Recognition using Wearable Inertial Measurement Units. In Proceedings of the XVI International Conference on Human Computer Interaction (Interacción ’15); Association for Computing Machinery: New York, NY, USA, 2015; Article 60; pp. 1–6. [Google Scholar] [CrossRef]
- Hölzemann, A.; Laerhoven, K.V. Using Wrist-Worn Activity Recognition for Basketball Game Analysis. In Proceedings of the 5th International Workshop on Sensor-Based Activity Recognition and Interaction (iWOAR ’18), Berlin, Germany, 20–21 September 2018; Association for Computing Machinery: New York, NY, USA, 2018. Article 13. pp. 1–6. [Google Scholar] [CrossRef]
- Hu, X.; Liang, F.; Fang, Z.; Qu, X.; Zhao, Z.; Ren, Z.; Cai, W. Automatic temporal event detection of the Ollie movement during skateboarding using wearable IMUs. Sports Biomech. 2021. [Google Scholar] [CrossRef]
- Blair, S.; Duthie, G.; Robertson, S.; Hopkins, W.; Ball, K. Concurrent validation of an inertial measurement system to quantify kicking biomechanics in four football codes. J. Biomech. 2019, 73, 24–32. [Google Scholar] [CrossRef]
- Horenstein, R.E.; Goudeau, Y.R.; Lewis, C.L.; Shefelbine, S.J. Using magneto-inertial measurement units to pervasively measure hip joint motion during sports. Sensors 2020, 20, 4970. [Google Scholar] [CrossRef] [PubMed]
- Wilmes, E.; De Ruiter, C.J.; Bastiaansen, B.J.C.; Van Zon, J.F.J.A.; Vegter, R.J.K.; Brink, M.S.; Goedhart, E.A.; Lemmink, K.A.P.M.; Savelsbergh, G.J.P. Inertial sensor-based motion tracking in football with movement intensity quantification. Sensors 2020, 20, 2527. [Google Scholar] [CrossRef] [PubMed]
- Fuss, F.K.; Düking, P.; Weizman, Y. Discovery of a sweet spot on the foot with a smart wearable soccer boot sensor that maximizes the chances of scoring a curved kick in soccer. Front. Physiol. 2018, 9, 63. [Google Scholar] [CrossRef] [PubMed]
- Dörge, H.C.; Andersen, T.B.; Sørensen, H.; Simonsen, E.B. Biomechanical differences in soccer kicking with the preferred and the non-preferred leg. J. Sports Sci. 2002, 20, 293–299. [Google Scholar] [CrossRef]
- Shan, G.; Westerhoff, P. Full-body kinematic characteristics of the maximal instep soccer kick by male soccer players and parameters related to kick quality. Sports Biomech. 2005, 4, 59–72. [Google Scholar] [CrossRef]
- Kondo, Y.; Ishii, S.; Aoyagi, H.; Hossain, T.; Yokokubo, A.; Lopez, G. FootbSense: Soccer Moves Identification Using a Single IMU. In Sensor- and Video-Based Activity and Behavior Computing; Ahad, M.A.R., Inoue, S., Roggen, D., Fujinami, K., Eds.; Smart Innovation, Systems and Technologies; Springer: Singapore, 2022; Volume 291. [Google Scholar] [CrossRef]
- Kim, W.; Kim, M. Sports motion analysis system using wearable sensors and video cameras. In Proceedings of the 2017 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 18–20 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1089–1091. [Google Scholar] [CrossRef]
- Zaki, R.; Bulgiba, A.; Ismail, R.; Ismail, N.A. Statistical methods used to test for agreement of medical instruments measuring continuous variables in method comparison studies: A systematic review. PLoS ONE 2012, 7, e37908. [Google Scholar] [CrossRef]
- TDK InvenSense. World’s First Wide-Range 6-Axis MEMS MotionTracking™ Device for Sports and High Impact Applications, DS-000192 Datasheet. March 2016 [Revised July 2021]. Available online: https://invensense.tdk.com/smartmotion/6-axis/ (accessed on 1 May 2021).
- Lapinski, M. A Platform for High-Speed Biomechanical Data Analysis Using Wearable Wireless Sensors. Ph.D. Thesis, MIT, Cambridge, MA, USA, 2013. [Google Scholar]
- Ishii, H.; Yanagiya, T.; Naito, H.; Katamoto, S.; Maruyama, T. Theoretical Study of Factors Affecting Ball Velocity in Instep Soccer Kicking. J. Appl. Biomech. 2012, 28, 258–270. [Google Scholar] [CrossRef]
- Kellis, E.; Katis, A. Biomechanical characteristics and determinants of instep soccer kick. J. Sports Sci. Med. 2007, 6, 154–165. [Google Scholar]
- Zhou, L.; Tunca, C.; Fischer, E.; Brahms, M.; Ersoy, C.; Granacher, U.; Arnrich, B. Validation of an IMU Gait Analysis Algorithm for Gait Monitoring in Daily Life Situations. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 4229–4232. [Google Scholar] [CrossRef]
- Servati, A.; Zou, L.; Wang, Z.J.; Ko, F.; Servati, P. Novel Flexible Wearable Sensor Materials and Signal Processing for Vital Sign and Human Activity Monitoring. Sensors 2017, 17, 1622. [Google Scholar] [CrossRef]
- Garlant, J.A.; Ammann, K.R.; Slepian, M.J. Stretchable Electronic Wearable Motion Sensors Delineate Signatures of Human Motion Tasks. ASAIO J. 2018, 64, 351–359. [Google Scholar] [CrossRef]
- Rogers, J.A.; Someya, T.; Huang, Y. Materials and Mechanics for Stretchable Electronics. Science 2010, 327, 1603–1607. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Qiu, S.; Wang, Z.L.; Li, J.; Wang, J.X. Canoeing Motion Tracking and Analysis via Multi-Sensors Fusion. Sensors 2020, 20, 2110. [Google Scholar] [CrossRef] [PubMed]
- Medeiros, C.B.; Wanderley, M.M. Multiple-Model Linear Kalman Filter Framework for Unpredictable Signals. IEEE Sens. J. 2014, 14, 979–991. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instep Kicking Test of Sample Size 10 | Reconstructed Trajectory | Foot Velocity Analysis (Instantaneous Velocity) | Backswing Height Analysis | ||||||
| Average Length (m) | Position RMSE (m) | Velocity RMSE (m/s) | IMU (m/s) | Image Analysis (m/s) | Error | IMU (m) | Image Analysis (m) | Error | |
| 3.63 | 0.07 | 0.034 | 7.468 | 7.409 | 4.0% | 0.741 | 0.756 | 2.8% | |
| Motion Type | Motion Length | Position RMSE | Maximum Velocity | Velocity RMSE | Velocity RMSE % | IMU Used | |
|---|---|---|---|---|---|---|---|
| Gait-related | stride | 1.5 m | 0.05 m | N/A | N/A | N/A | 2 |
| A-SLAC | walking | 3.6 m | 0.038 m | 1.5 m/s | 0.051 m/s | 3% | 3 |
| Our system | instep kicking | 3.63 m | 0.07 m | 7.47 m/s | 0.034 m/s | 0.45% | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, C.; Huang, T.-Y.; Ma, H.-P. Motion Analysis of Football Kick Based on an IMU Sensor. Sensors 2022, 22, 6244. https://doi.org/10.3390/s22166244
Yu C, Huang T-Y, Ma H-P. Motion Analysis of Football Kick Based on an IMU Sensor. Sensors. 2022; 22(16):6244. https://doi.org/10.3390/s22166244
Chicago/Turabian StyleYu, Chun, Ting-Yuan Huang, and Hsi-Pin Ma. 2022. "Motion Analysis of Football Kick Based on an IMU Sensor" Sensors 22, no. 16: 6244. https://doi.org/10.3390/s22166244
APA StyleYu, C., Huang, T.-Y., & Ma, H.-P. (2022). Motion Analysis of Football Kick Based on an IMU Sensor. Sensors, 22(16), 6244. https://doi.org/10.3390/s22166244