
Safe Driving Distance and Speed for Collision Avoidance in Connected Vehicles

 ,
,  and
and 
Abstract
:1. Introduction
- (a)
- Forward collision due to tailgating.
- (b)
- Traffic optimization: leaving too much gap between two connected vehicles will result in poor utilization of the roads and highways and consequently create unnecessary traffic on crowded roads.
- (c)
- Over speeding (for the following vehicle) and under speeding (for the followed vehicle) on a busy highway.
- (1)
- We studied the different measurement techniques that can be used to measure in real time the Assured Clear Distance Ahead (ACDA) in the IoV environment and autonomous vehicles.
- (2)
- We have studied in detail all the factors affecting the Stopping Distance by studying the braking dynamics in the IoV and the autonomous vehicles.
- (3)
- We conducted a complete study considering all the parameters affecting the safe following distance and speed as the current speed of the followed vehicle, the speed of the following vehicle, the separation distance, the deceleration, the driver reaction time, road conditions (Asphalt, pavement, wet, dry, snow), the weather conditions (rainy, foggy, clear), the mass of the vehicles, the braking force, the tires state, etc.
- (4)
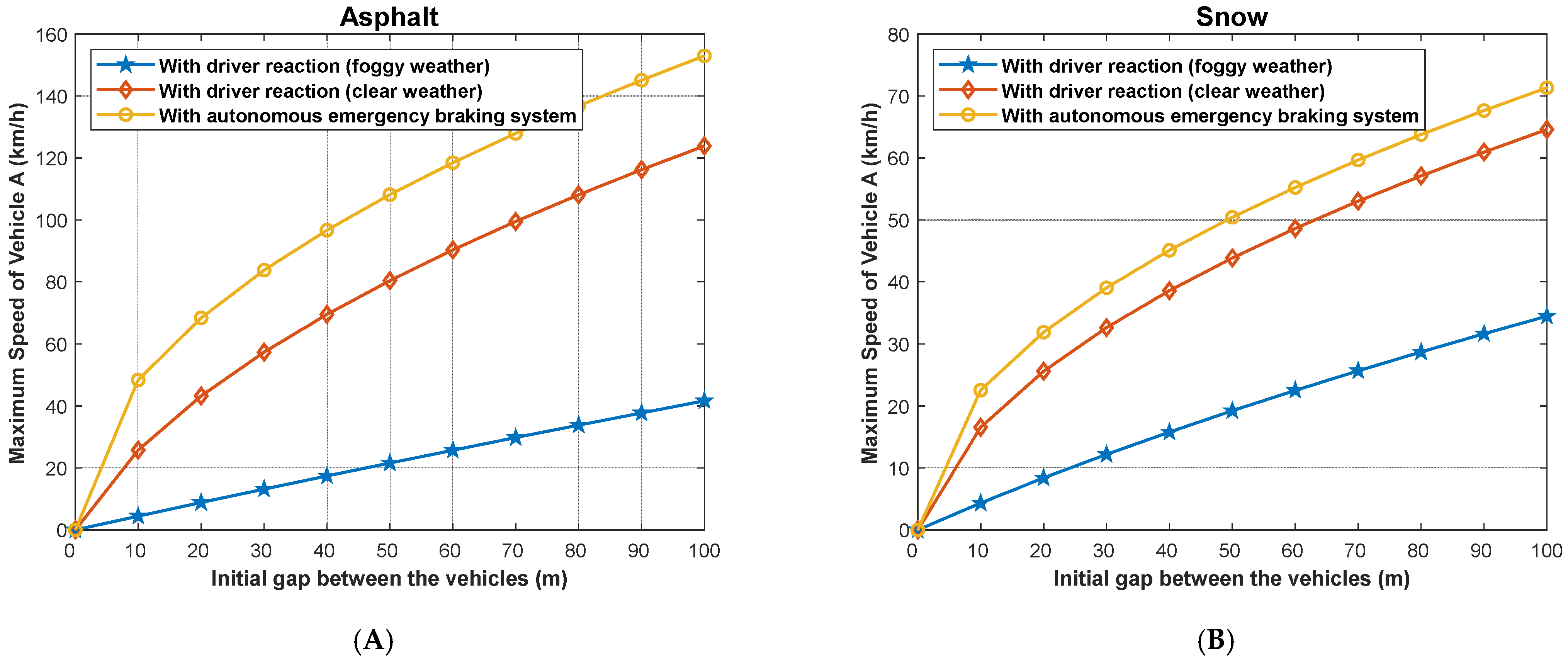
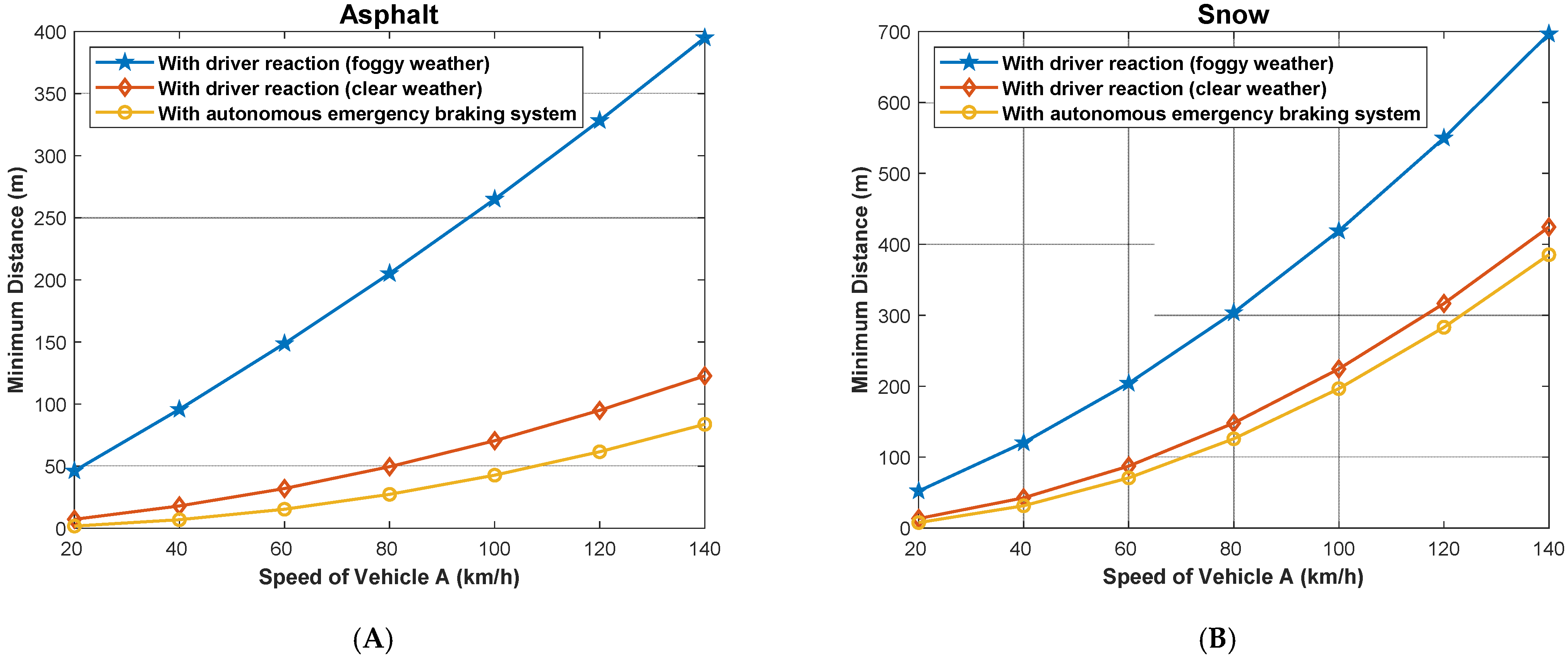
- Studying the effect of using the Autonomous Emergency Braking (AEB) system that exists in some vehicles and is a must in autonomous vehicles. In other words, we studied the case when the rear vehicle auto-brake in case of emergency, hence eliminating the driver’s reaction time, especially in foggy weather or bad visibility conditions, hence maximizing the road efficiency and decreasing the trip time.
- (5)
- Studying the case when the followed vehicle instantly stops and the effect of the safe driving distance and the safe following speed. In other words, we studied the effect of the sudden stop of the followed vehicle on the safe driving distance and speed for the different conditions.
- (6)
- We formulated how to use the IoV emergency safety message to exchange the related parameters between the followed and the following vehicles so that each vehicle on the road can calculate the ideal safe following distance and speed according to the current conditions (such as road conditions, weather conditions, car conditions, vehicle’s locations and speed, the length of the vehicles, etc.).
2. Related Works
3. Assured Clear Distance Ahead (ACDA) Measurements
4. Stopping Distance and Braking Dynamics
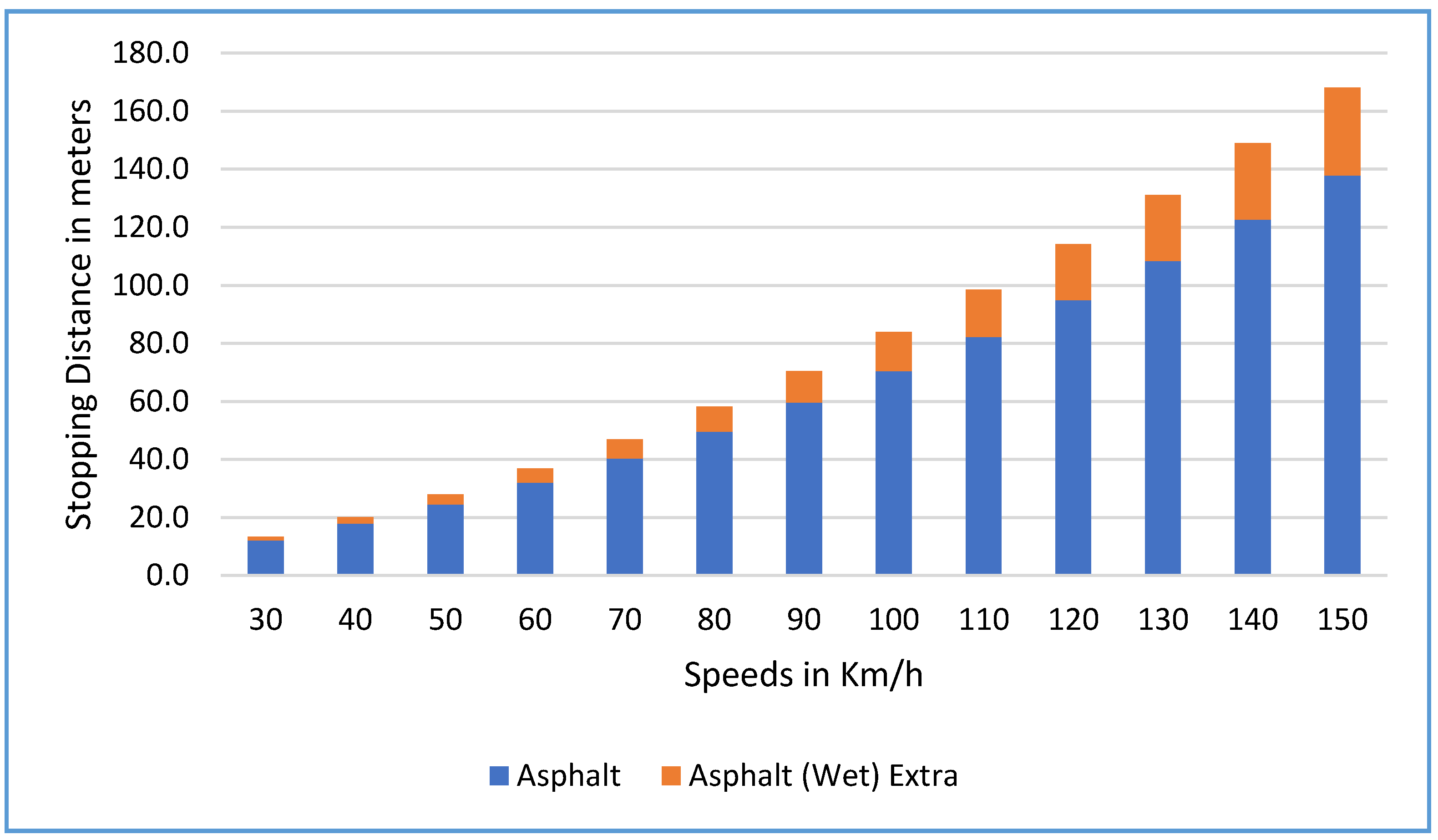
- CASE A: The stopping distance of a vehicle traveling on dry asphalt road at different speeds as reaction distance plus braking distance. At a low speed (for example, 30 km/h), the reaction distance is doubled when the braking distance 8 m (independent of the type of road), and the braking distance is 4 m. The braking distance becomes higher at high speed (braking distance = 84 m compared to a reaction distance of 39 m at 140 km/h).
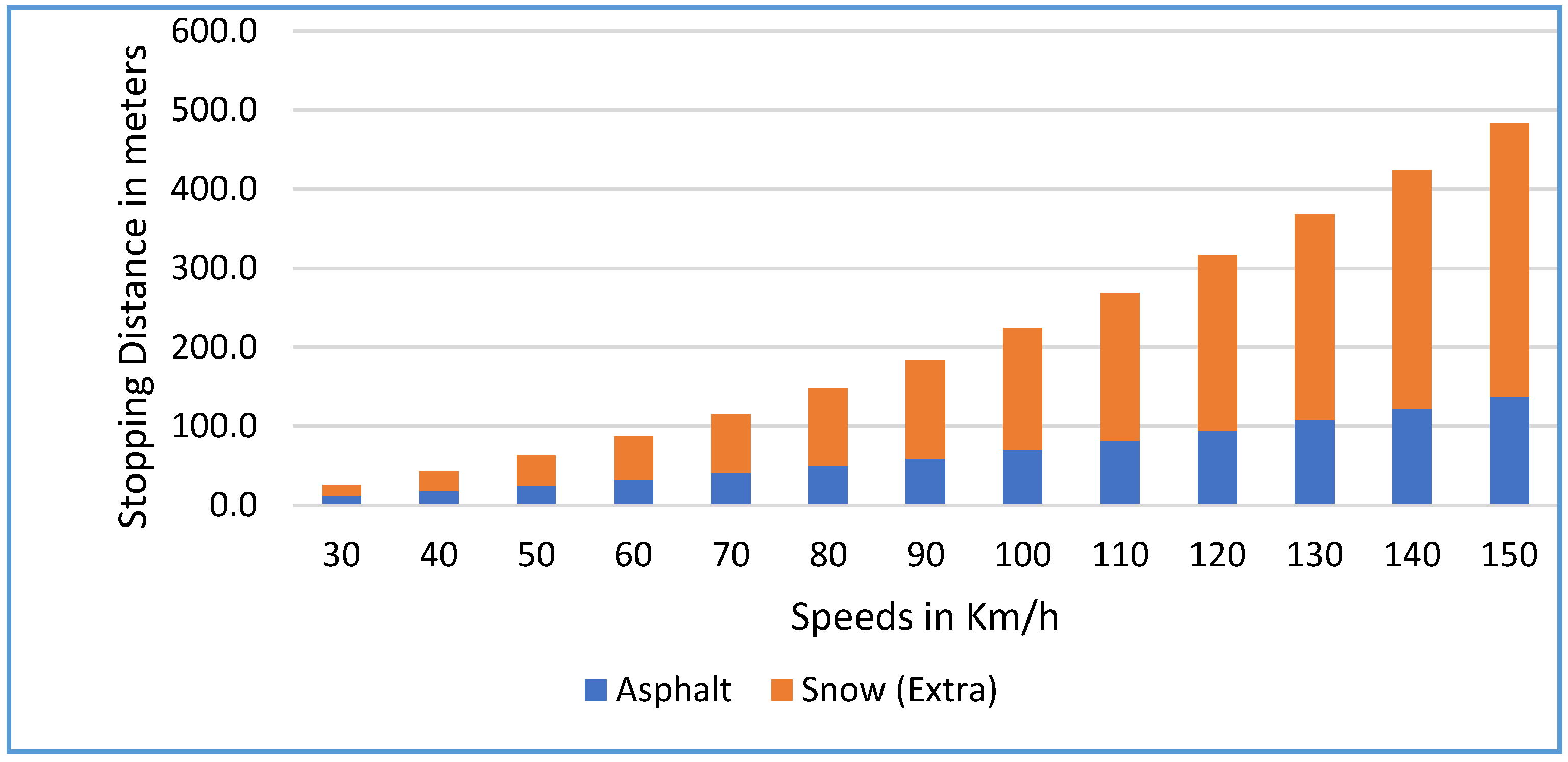
- CASE B: On a snowy road, the stopping distance is longer mainly due to the longer braking distance. At 20 km/h, for example, the braking distance is 58.5% of the stopping distance (7.9 m), and at higher speed, for example, at 140 km/h, the braking distance is 90.8% of the stopping distance (385 m).
- CASE C: The same phenomenon is observed on icy roads. The braking distance at 20 km/h is 73.7% (15.7 m) of the stopping distance and at a higher speed of 140 km/h, the braking distance is 95.2% of the stopping distance.
4.1. Sufficient Safe Gap between Two Vehicles
4.2. Weather Effects on the Stopping Distance
4.3. Case When the Rear Vehicle Auto-Brake in Case of Emergency
4.4. Sudden Stop of Vehicle B
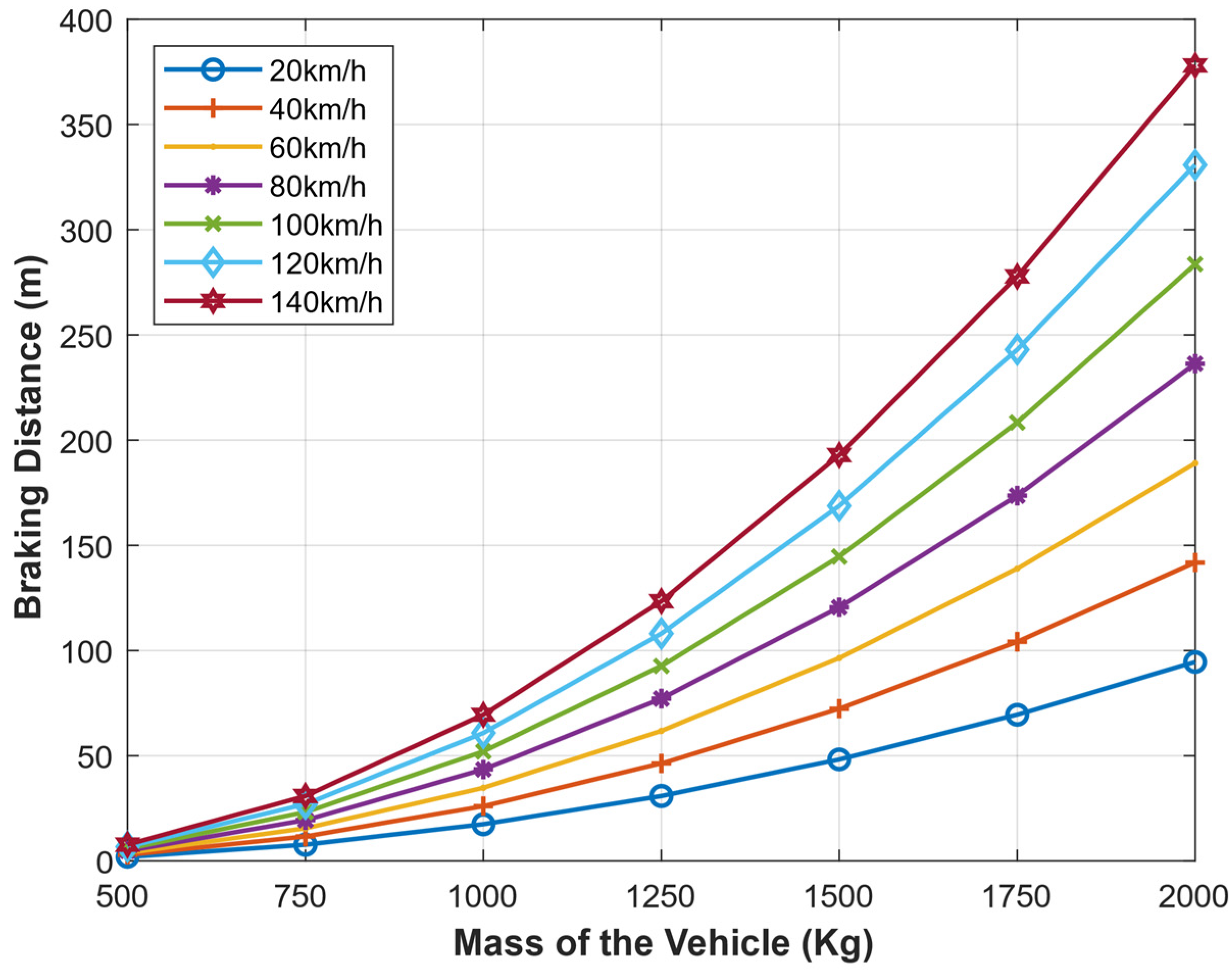
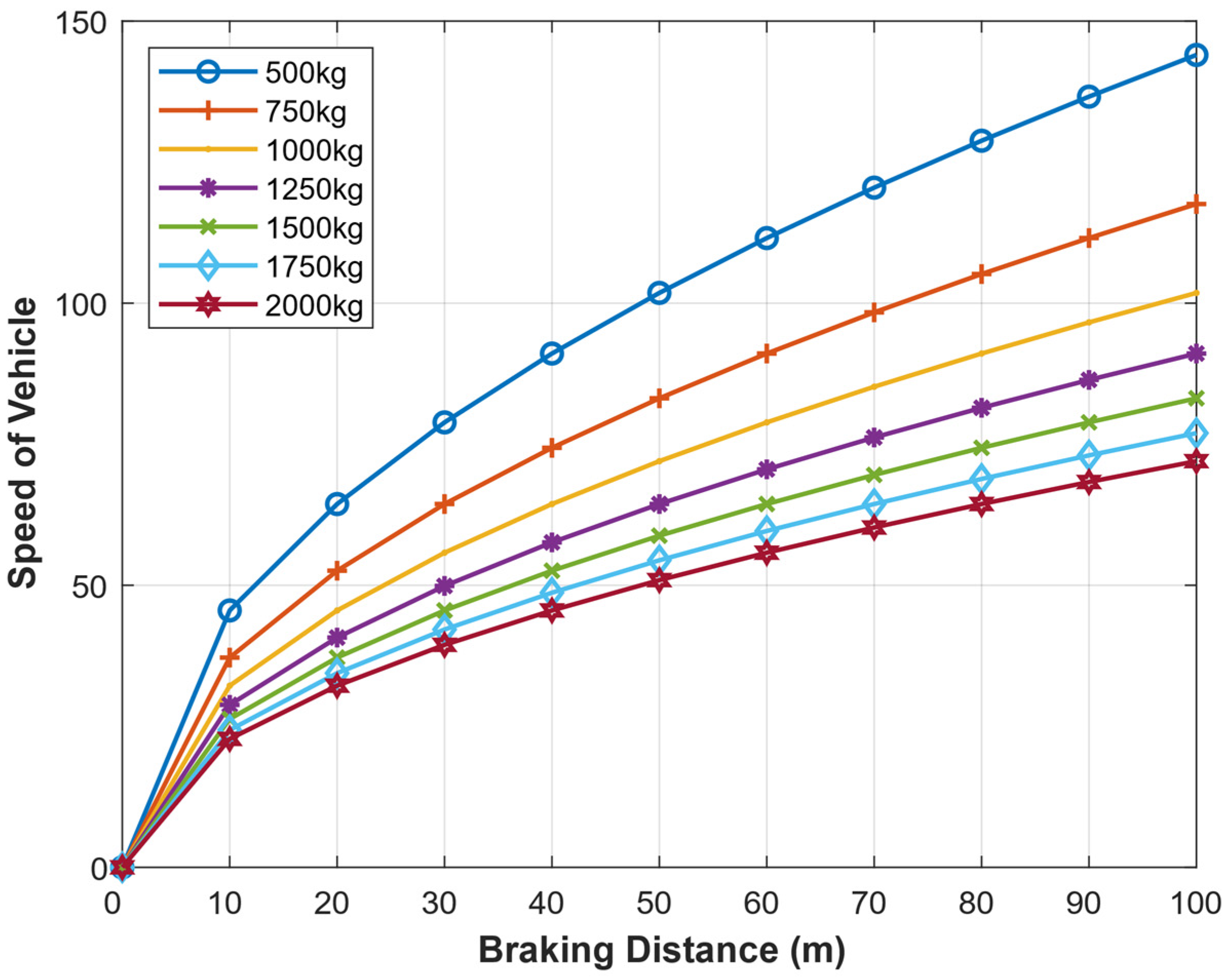
4.5. Mass of the Vehicle
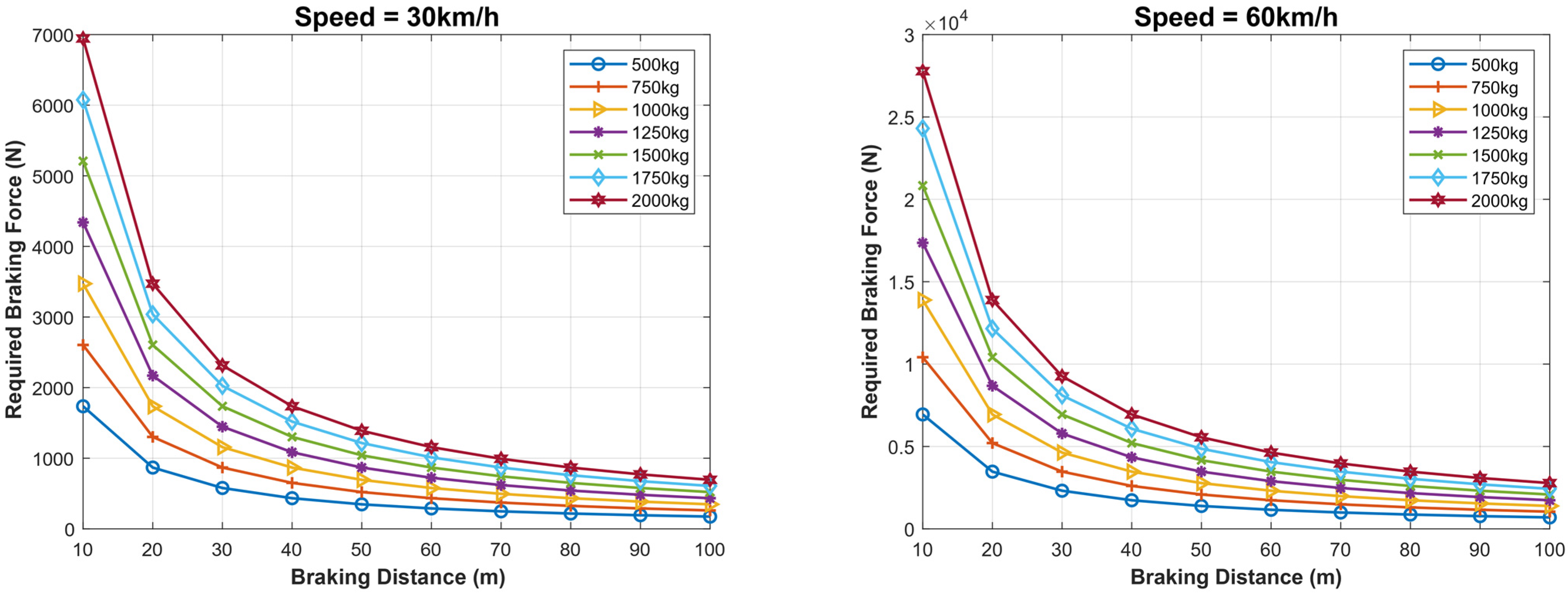
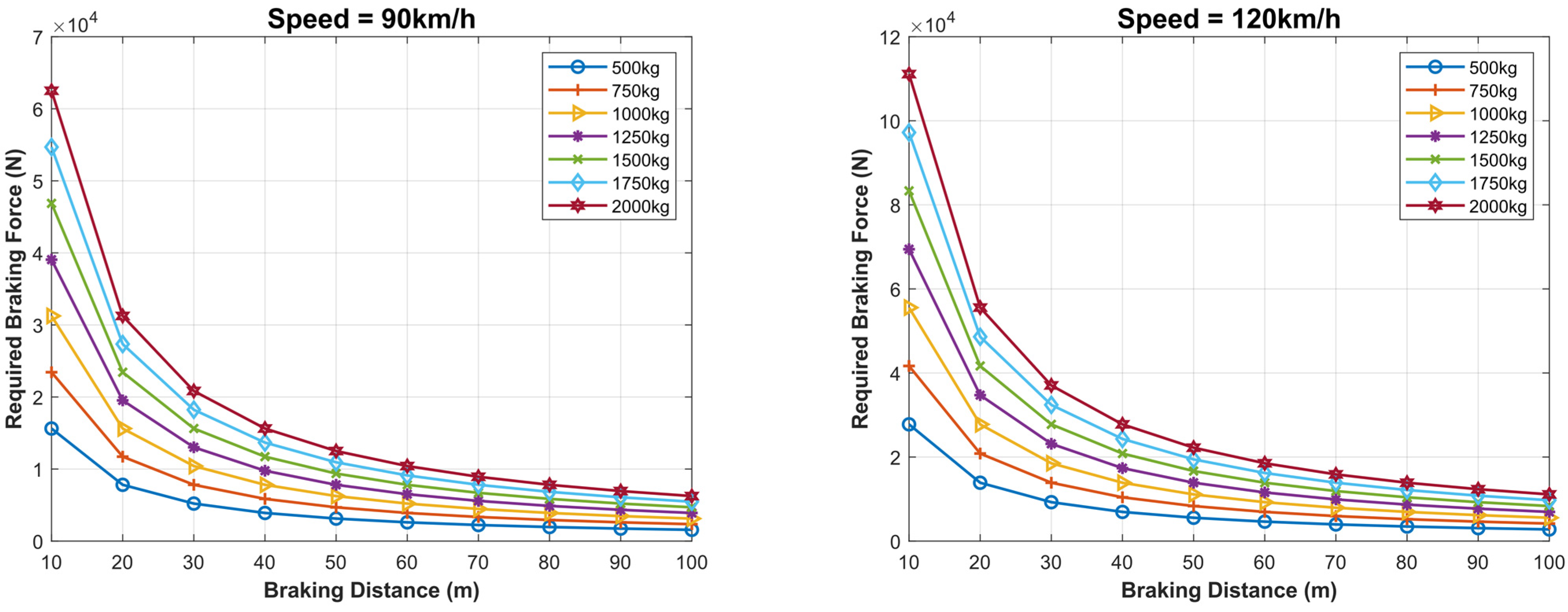
4.6. Required Braking Force Given the Mass and the Speed to Yield the Same Braking Distance
5. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alexakos, C.; Votis, K.; Tzovaras, D.; Serpanos, D. Reshaping the Intelligent Transportation Scene: Challenges of an Operational and Safe Internet of Vehicles. Computer 2022, 55, 104–107. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Y.; Zhou, Y. User-Centered Cooperative Communication Strategy for 5G Internet of Vehicles. IEEE Internet Things J. 2022, 9, 13486–13497. [Google Scholar] [CrossRef]
- Chen, C.; Liu, L.; Qiu, T.; Jiang, J.; Pei, Q.; Song, H. Routing With Traffic Awareness and Link Preference in Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 200–214. [Google Scholar] [CrossRef]
- Mohamed, S.A.E.; AlShalfan, K.A. Intelligent Traffic Management System Based on the Internet of Vehicles (IoV). J. Adv. Transp. 2021, 2021, 4037533. [Google Scholar] [CrossRef]
- Jeong, J.; Shen, Y.; Oh, T.; Céspedes, S.; Benamar, N.; Wetterwald, M.; Härri, J. A comprehensive survey on vehicular networks for smart roads: A focus on IP-based approaches. Veh. Commun. 2021, 29, 100334. [Google Scholar] [CrossRef]
- Alouache, L.; Nguyen, N.; Aliouat, M.; Chelouah, R. Survey on IoV routing protocols: Security and network architecture. Int. J. Commun. Syst. 2019, 32, e3849. [Google Scholar] [CrossRef]
- Ji, B.; Zhang, X.; Mumtaz, R.S.; Han, C.; Li, C.; Wen, H.; Wang, D. Survey on the Internet of Vehicles: Network Architectures and Applications. IEEE Commun. Stand. Mag. 2020, 4, 34–41. [Google Scholar] [CrossRef]
- Mahmood, A.; Sheng, Q.Z.; Siddiqui, S.A.; Sagar, S.; Zhang, W.E.; Suzuki, H.; Ni, W. When Trust Meets the Internet of Vehicles: Opportunities, Challenges, and Future Prospects. In Proceedings of the 2021 IEEE 7th International Conference on Collaboration and Internet Computing, CIC 2021, Online, 13–15 December 2021; pp. 60–67. [Google Scholar] [CrossRef]
- Le Vine, S.; Liu, X.; Zheng, F.; Polak, J. Automated cars: Queue discharge at signalized intersections with ‘Assured-Clear-Distance-Ahead’ driving strategies. Transp. Res. Part C Emerg. Technol. 2016, 62, 35–54. [Google Scholar] [CrossRef]
- Leibowitz, H.W.; Owens, D.A.; Tyrrell, R.A. The assured clear distance ahead rule: Implications for nighttime traffic safety and the law. Accid. Anal. Prev. 1998, 30, 93–99. [Google Scholar] [CrossRef]
- Yimer, T.H.; Wen, C.; Yu, X.; Jiang, C. A Study of the Minimum Safe Distance between Human Driven and Driverless Cars Using Safe Distance Model. arXiv 2020, arXiv:2006.07022 2020. [Google Scholar]
- Gounis, K.; Bassiliades, N. Intelligent momentary assisted control for autonomous emergency braking. Simul. Model. Pract. Theory 2022, 115, 102450. [Google Scholar] [CrossRef]
- Ju, J.; Bi, L.; Feleke, A.G. Noninvasive neural signal-based detection of soft and emergency braking intentions of drivers. Biomed. Signal Process. Control 2022, 72, 103330. [Google Scholar] [CrossRef]
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A Survey of the Connected Vehicle Landscape—Architectures, Enabling Technologies, Applications, and Development Areas. In IEEE Transactions on Intelligent Transportation Systems; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; Volume 19, pp. 2391–2406. [Google Scholar] [CrossRef]
- Ratzon, N.Z.; Perlman, A.; Rosenbloom, T. Safe driving and road-crossing tasks: A particular case of successful transfer of learning. Transp. Res. Part F Traffic Psychol. Behav. 2021, 82, 43–53. [Google Scholar] [CrossRef]
- Balci, B.; Alkan, B.; Elihos, A.; Artan, Y. NIR Camera Based Mobile Seat Belt Enforcement System Using Deep Learning Techniques. In Proceedings of the 2018 14th International Conference on Signal-Image Technology Internet-Based Systems (SITIS), Las Palmas de Gran Canaria, Spain, 26–29 November 2018; pp. 247–252. [Google Scholar] [CrossRef]
- Nasr, A.; Mohamed, S.A.E. Accurate Distance Estimation for VANET Using Nanointegrated Devices. Opt. Photon-J. 2012, 2, 113–118. [Google Scholar] [CrossRef]
- Mohamed, S.A.E.; Parvez, M.T.; Alshalfan, K.A.; Mahmoud, Y.; Al-hagery, M.A.; Othman, M.T.B. Autonomous Real-Time Speed-Limit Violation Detection and Reporting Systems Based on the Internet of Vehicles (IoV). J. Adv. Transp. 2021, 2021, 1–15. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, W.; Yeo, C.K. Automatic Detection of Parking Violation and Capture of License Plate. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 0495–0500. [Google Scholar] [CrossRef]
- Baratsanjeevi, T.; Deepakkrishna, S.; Harrine, M.; Sharan, S.; Prabhu, E. IoT based Traffic Sign Detection and Violation Control. In Proceedings of the 2020 Second International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 15–17 July 2020; pp. 333–339. [Google Scholar] [CrossRef]
- Seatzu, C.; Wardi, Y. Congestion management in traffic-light intersections via Infinitesimal Perturbation Analysis. IFAC-PapersOnLine 2015, 48, 117–122. [Google Scholar] [CrossRef]
- Kerimov, M.; Evtiukov, S.; Marusin, A. Model of multi-level system managing automated traffic enforcement facilities recording traffic violations. Transp. Res. Procedia 2020, 50, 242–252. [Google Scholar] [CrossRef]
- Yousef, A.; Shatnawi, A.; Latayfeh, M. Intelligent traffic light scheduling technique using calendar-based history information. Future Gener. Comput. Syst. 2018, 91, 124–135. [Google Scholar] [CrossRef]
- Sharma, S.; Kaushik, B. A survey on internet of vehicles: Applications, security issues & solutions. Veh. Commun. 2019, 20, 100182. [Google Scholar] [CrossRef]
- Jeong, H.; Shen, Y.; Jeong, J.; Oh, T. A comprehensive survey on vehicular networking for safe and efficient driving in smart transportation: A focus on systems, protocols, and applications. Veh. Commun. 2021, 31, 100349. [Google Scholar] [CrossRef]
- Fadilah, S.I.; Shariff, A.R.M. A Time Gap Interval for Safe Following Distance (TGFD) in Avoiding Car Collision in Wireless Vehicular Networks (VANET) Environment. In Proceedings of the 2014 Fifth International Conference on Intelligent Systems, Modelling and Simulation, Langkawi, Malaysia, 27–29 January 2014; pp. 683–689. [Google Scholar] [CrossRef]
- Villagra, A.; Alba, E.; Luque, G. A better understanding on traffic light scheduling: New cellular GAs and new in-depth analysis of solutions. J. Comput. Sci. 2020, 41, 101085. [Google Scholar] [CrossRef]
- Joo, H.; Ahmed, S.H.; Lim, Y. Traffic signal control for smart cities using reinforcement learning. Comput. Commun. 2020, 154, 324–330. [Google Scholar] [CrossRef]
- Ang, L.-M.; Seng, K.P.; Ijemaru, G.K.; Zungeru, A.M. Deployment of IoV for Smart Cities: Applications, Architecture, and Challenges. IEEE Access 2019, 7, 6473–6492. [Google Scholar] [CrossRef]
- Mohamed, S.A.E. Automatic Traffic Violation Recording and Reporting System to Limit Traffic Accidents: Based on Vehicular Ad-hoc Networks (VANET). In Proceedings of the 2019 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 2–4 February 2019; pp. 254–259. [Google Scholar] [CrossRef]
- Mohamed, S.A.E. Smart Street Lighting Control and Monitoring System for Electrical Power Saving by Using VANET. Int. J. Commun. Netw. Syst. Sci. 2013, 6, 351–360. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.-Y.; Wei, H.-Y. Road Capacity and Throughput for Safe Driving Autonomous Vehicles. IEEE Access 2020, 8, 95779–95792. [Google Scholar] [CrossRef]
- Cao, Z.; Yang, D.; Jiang, K.; Xu, S.; Wang, S.; Zhu, M.; Xiao, Z. A geometry-driven car-following distance estimation algorithm robust to road slopes. Transp. Res. Part C Emerg. Technol. 2019, 102, 274–288. [Google Scholar] [CrossRef]
- Olaverri-Monreal, C.; Krizek, G.C.; Michaeler, F.; Lorenz, R.; Pichler, M. Collaborative approach for a safe driving distance using stereoscopic image processing. Future Gener. Comput. Syst. 2019, 95, 880–889. [Google Scholar] [CrossRef]
- Bernhard, C.; Oberfeld, D.; Hecht, H. Rear-view perception in driving: Distance information is privileged in the selection of safe gaps. Transp. Res. Part F Traffic Psychol. Behav. 2022, 86, 263–280. [Google Scholar] [CrossRef]
- Huang, Y.; Yan, X.; Li, X.; Duan, K.; Rakotonirainy, A.; Gao, Z. Improving car-following model to capture unobserved driver heterogeneity and following distance features in fog condition. Transp. A Transp. Sci. 2022, 10, 1–24. [Google Scholar] [CrossRef]
- Sun, S.; Hu, J.; Wang, R. Correlation between visibility and traffic safety visual distance in foggy areas during the daytime. Traffic Inj. Prev. 2021, 22, 514–518. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Pu, Z.; Hu, J.; Wang, X.; Ke, R. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving. Transp. Res. Part C Emerg. Technol. 2020, 117, 102662. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, H.; Tang, J.; Meng, X.; Hu, L. Velocity control in car-following behavior with autonomous vehicles using reinforcement learning. Accid. Anal. Prev. 2022, 174. [Google Scholar] [CrossRef]
- Hou, A.-L.; Cui, X.; Geng, Y.; Yuan, W.-J.; Hou, J. Measurement of Safe Driving Distance Based on Stereo Vision. In Proceedings of the Sixth International Conference on Image and Graphics, Washington, DC, USA, 12–15 August 2011; pp. 902–907. [Google Scholar] [CrossRef]
- Lee, H.; Kim, K.; Kim, N.; Cha, S.W. Energy efficient speed planning of electric vehicles for car-following scenario using model-based reinforcement learning. Appl. Energy 2022, 313, 118460. [Google Scholar] [CrossRef]
- Chang, B.-J.; Chiou, J.-M. Cloud Computing-Based Analyses to Predict Vehicle Driving Shockwave for Active Safe Driving in Intelligent Transportation System. IEEE Trans. Intell. Transp. Syst. 2019, 21, 852–866. [Google Scholar] [CrossRef]
- CatchSystems. Tailgating Detection via VCS. Available online: https://www.catchsystems.nl/en/specials/tailgating-detection (accessed on 10 August 2021).
- Zong, F.; Wang, M.; Tang, J.; Zeng, M. Modeling AVs & RVs’ car-following behavior by considering impacts of multiple surrounding vehicles and driving characteristics. Phys. A Stat. Mech. Appl. 2021, 589, 126625. [Google Scholar] [CrossRef]
- Rajendar, S.; Rathinasamy, D.; Pavithra, R.; Kaliappan, V.K.; Gnanamurthy, S. Prediction of stopping distance for autonomous emergency braking using stereo camera pedestrian detection. Mater. Today Proc. 2021, 51, 1224–1228. [Google Scholar] [CrossRef]
- Gargoum, S.A.; Tawfeek, M.H.; El-Basyouny, K.; Koch, J.C. Available sight distance on existing highways: Meeting stopping sight distance requirements of an aging population. Accid. Anal. Prev. 2018, 112, 56–68. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, W.; Feng, Z.; Yu, H.; Wang, C. Reasonable driving speed limits based on recognition time in a dynamic low-visibility environment related to fog—A driving simulator study. Accid. Anal. Prev. 2021, 154, 106060. [Google Scholar] [CrossRef]
- Qu, J.; Cui, Y.; Zhu, W. Algorithm and Its Implementation of Vehicle Safety Distance Control Based on the Numerical Simulation. J. Netw. 2014, 9, 3486. [Google Scholar] [CrossRef]
- Revnivykh, S.; Bolkunov, A.; Serdyukov, A.; Montenbruck, O. GLONASS; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Gargoum, S.A.; El-Basyouny, K. Analyzing the ability of crash-prone highways to handle stochastically modelled driver demand for stopping sight distance. Accid. Anal. Prev. 2020, 136, 105395. [Google Scholar] [CrossRef]
- U.S. Department of Defense. Global Positioning System Standard Positioning Service. 2008. Available online: www.Gps.Gov (accessed on 20 July 2022).
- Solak, S.; BOLAT, E.D. A new hybrid stereovision-based distance-estimation approach for mobile robot platforms. Comput. Electr. Eng. 2018, 67, 672–689. [Google Scholar] [CrossRef]
- Chen, K.-W.; Wang, C.-H.; Wei, X.; Liang, Q.; Chen, C.-S.; Yang, M.-H.; Hung, Y.-P. Vision-Based Positioning for Internet-of-Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 364–376. [Google Scholar] [CrossRef]
- Jahromi, B.S.; Tulabandhula, T.; Cetin, S. Real-Time Hybrid Multi-Sensor Fusion Framework for Perception in Autonomous Vehicles. Sensors 2019, 19, 4357. [Google Scholar] [CrossRef] [Green Version]
- Demetriou, S.; Jain, P.; Kim, K.-H. CoDrive: Improving Automobile Positioning via Collaborative Driving. In Proceedings of the Proceeding-IEEE INFOCOM, Honolulu, HI, USA, 15–19 April 2018; pp. 72–80. [Google Scholar] [CrossRef]
- Khomsin; Anjasmara, I.; Pratomo, D.G.; Ristanto, W. Accuracy Analysis of GNSS (GPS, GLONASS and BEIDOU) Obsevation For Positioning. E3S Web Conf. 2019, 94, 01019. [Google Scholar] [CrossRef]
- Mohamed, S.A.E. Precise Positioning Systems for Vehicular Ad-Hoc Networks. Int. J. Wirel. Mob. Netw. 2012, 4, 251–265. [Google Scholar] [CrossRef]
- Mohamed, S.A.E. Why The Accuracy Of The Received Signal Strengths As A Positioning Technique Was Not Accurate? Int. J. Wirel. Mob. Netw. 2011, 3, 69–82. [Google Scholar] [CrossRef]
- Mohamed, S.A.E. Secure position verification approach for wireless ad-hoc networks. Int. J. Netw. Secur. 2013, 15, 248–255. [Google Scholar]
- Bagga, P.; Sutrala, A.K.; Das, A.K.; Vijayakumar, P. Blockchain-based batch authentication protocol for Internet of Vehicles. J. Syst. Arch. 2020, 113, 101877. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Considered Parameters | Category | Finding and Limitations of the Study |
|---|---|---|---|
| [32] | Speed and the deceleration of both vehicles. | Safe driving capacity | Only safe driving distance at the intersection and straight roads were considered as a function of the speed and deceleration. The study did not consider many important parameters such as the road stat, the current separation gap, the tires condition, the visibility, the weather conditions, the weight of the vehicles, the length of the vehicles, and the braking force. The study did not consider the case when the front vehicle stops instantly (in zero time). In addition, the study did not consider the effect of different driver reaction times. Additionally, the study did not consider the cases when the vehicle is equipped with an Autonomous Emergency Braking (AEB) system or not. The study did not consider the different types of distance measurement techniques used in IoV and CV. |
| [33,34,35] | Distance estimation using a camera. | Distance measurement | It does not consider any parameter of those considered in our proposed work. The work proposes an algorithm that uses a single camera to estimate the distance; it does not consider the safe driving distance or the safe driving speed. |
| [36,37] | Fog condition only | Safe driving distance | The study considers the car-following distance as a function of different levels of fog conditions; it does not consider any of the other important conditions that we are considering and mentioned in first row of this table. |
| [38,39] | Speed of the following vehicle and the distance | Safe driving distance | The study uses simulation and reinforcement learning to determine the safe driving distance as a function of the speed of the following vehicle and the separation gap only. |
| [34,40] | Distance estimation using two stereoscopic cameras. | Distance measurement | A stereovision-based approach for determining the safe driving distance. The proposed approach consists of having two cameras mounted on the security vehicle. The distance between the security vehicle and the ahead vehicle can be calculated using traditional camera calibration, and parameter distortion calculation. Although this approach is effective, it requires the presence of a security vehicle, which can be noticed by the driver. Furthermore, it is not suitable for next-generation ITS and connected vehicle technologies. In addition, it is just a measuring approach without considering the safe driving distance or speed. |
| [26] | Speed and gap only | Safe driving distance | A safety indicator called time gap interval for safe following distance is proposed, which incorporates vehicle dynamics and driver behavior factors, including the time component, to broadcast and propagate appropriate safety messages in a vehicular ad hoc network (VANET) environment. The study considered the car speed, the gap and the length of the vehicles only. |
| Technology | Minimum Range (m) | Maximum Range (m) | Resolution (mm) | Accuracy | Update Rate (Hz) | Minimum Field of View (deg.) |
|---|---|---|---|---|---|---|
| Mico/Short LiDAR | 0.1 | 40 | ≈5 | ±5 cm | 1–1000 | ≈4 |
| Long Distance LiDAR | 40 | 160 | 10 | ±10 cm | 1–1000 | ≈0.5 |
| Infrared Proximity Sensor | 0.1 | 1.50 | - | ±1 cm | 26 | |
| Ultrasonic Range Finder | 0.15 | 6.5 | 1 | ±1 cm | 8–20 | 20–60 |
| Stereo Camera | 0.3 | 200 | 10 | ±5 cm | 1–60 | 5–100 |
| Standard GPS | 3 | ∞ | 20 | ±300 cm | 1–18 | |
| Global navigation satellite system (GNSS) | 1 | ∞ | 20 | ±100 cm | 1–18 | |
| Differential GPS (DGPS) | 0.3 | ∞ | 20 | ±30 cm | 1–18 | |
| RTK | 0.01 | ∞ | 1 | ±1 cm | 1–20 |
| Speed | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 | 120 | 130 | 140 | 150 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Asphalt | 3.2 | 7.3 | 12.2 | 18 | 25 | 32 | 40 | 50 | 60 | 71 | 82 | 95 | 108 | 123 | 138 |
| Asphalt (Wet) | 3.3 | 7.8 | 13.4 | 20 | 28 | 37 | 47 | 58 | 71 | 84 | 99 | 114 | 131 | 149 | 168 |
| Pavement | 3.3 | 7.5 | 12.8 | 19 | 26 | 34 | 44 | 54 | 65 | 77 | 90 | 104 | 119 | 135 | 152 |
| Pavement (Wet) | 3.4 | 8.2 | 14.2 | 22 | 30 | 40 | 52 | 64 | 78 | 93 | 110 | 128 | 147 | 167 | 189 |
| Snow | 4.7 | 13.4 | 26.0 | 43 | 63 | 87 | 116 | 148 | 184 | 224 | 268 | 316 | 368 | 424 | 484 |
| Ice | 6.7 | 21.3 | 43.7 | 74 | 112 | 158 | 212 | 274 | 344 | 421 | 506 | 600 | 701 | 810 | 927 |
| Speed | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 | 120 | 130 | 140 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (Km/h) Road Type | ||||||||||||||
| Reaction Distance (Independent of the Road Type) | 5.6 | 8 | 11 | 14 | 17 | 19 | 22 | 25 | 28 | 31 | 33 | 36 | 39 | |
| Asphalt | Braking Distance | 1.7 | 4 | 7 | 11 | 15 | 21 | 27 | 35 | 43 | 52 | 62 | 72 | 84 |
| Asphalt Wet | Braking Distance | 2.2 | 5 | 9 | 14 | 20 | 28 | 36 | 46 | 56 | 68 | 81 | 95 | 110 |
| Pavement | Braking Distance | 2.0 | 4 | 8 | 12 | 18 | 24 | 31 | 40 | 49 | 59 | 71 | 83 | 96 |
| Pavement Wet | Braking Distance | 2.6 | 6 | 10 | 16 | 24 | 32 | 42 | 53 | 66 | 79 | 94 | 111 | 128 |
| Snow | Braking Distance | 7.9 | 18 | 31 | 49 | 71 | 96 | 126 | 159 | 197 | 238 | 283 | 332 | 385 |
| Ice | Braking Distance | 15.7 | 35 | 63 | 98 | 142 | 193 | 252 | 319 | 393 | 476 | 566 | 665 | 771 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elsagheer Mohamed, S.A.; Alshalfan, K.A.; Al-Hagery, M.A.; Ben Othman, M.T. Safe Driving Distance and Speed for Collision Avoidance in Connected Vehicles. Sensors 2022, 22, 7051. https://doi.org/10.3390/s22187051
Elsagheer Mohamed SA, Alshalfan KA, Al-Hagery MA, Ben Othman MT. Safe Driving Distance and Speed for Collision Avoidance in Connected Vehicles. Sensors. 2022; 22(18):7051. https://doi.org/10.3390/s22187051
Chicago/Turabian StyleElsagheer Mohamed, Samir A., Khaled A. Alshalfan, Mohammed A. Al-Hagery, and Mohamed Tahar Ben Othman. 2022. "Safe Driving Distance and Speed for Collision Avoidance in Connected Vehicles" Sensors 22, no. 18: 7051. https://doi.org/10.3390/s22187051
APA StyleElsagheer Mohamed, S. A., Alshalfan, K. A., Al-Hagery, M. A., & Ben Othman, M. T. (2022). Safe Driving Distance and Speed for Collision Avoidance in Connected Vehicles. Sensors, 22(18), 7051. https://doi.org/10.3390/s22187051