


Precision Seeding Compensation and Positioning Based on Multisensors
Abstract
:1. Introduction
2. Materials and Methods
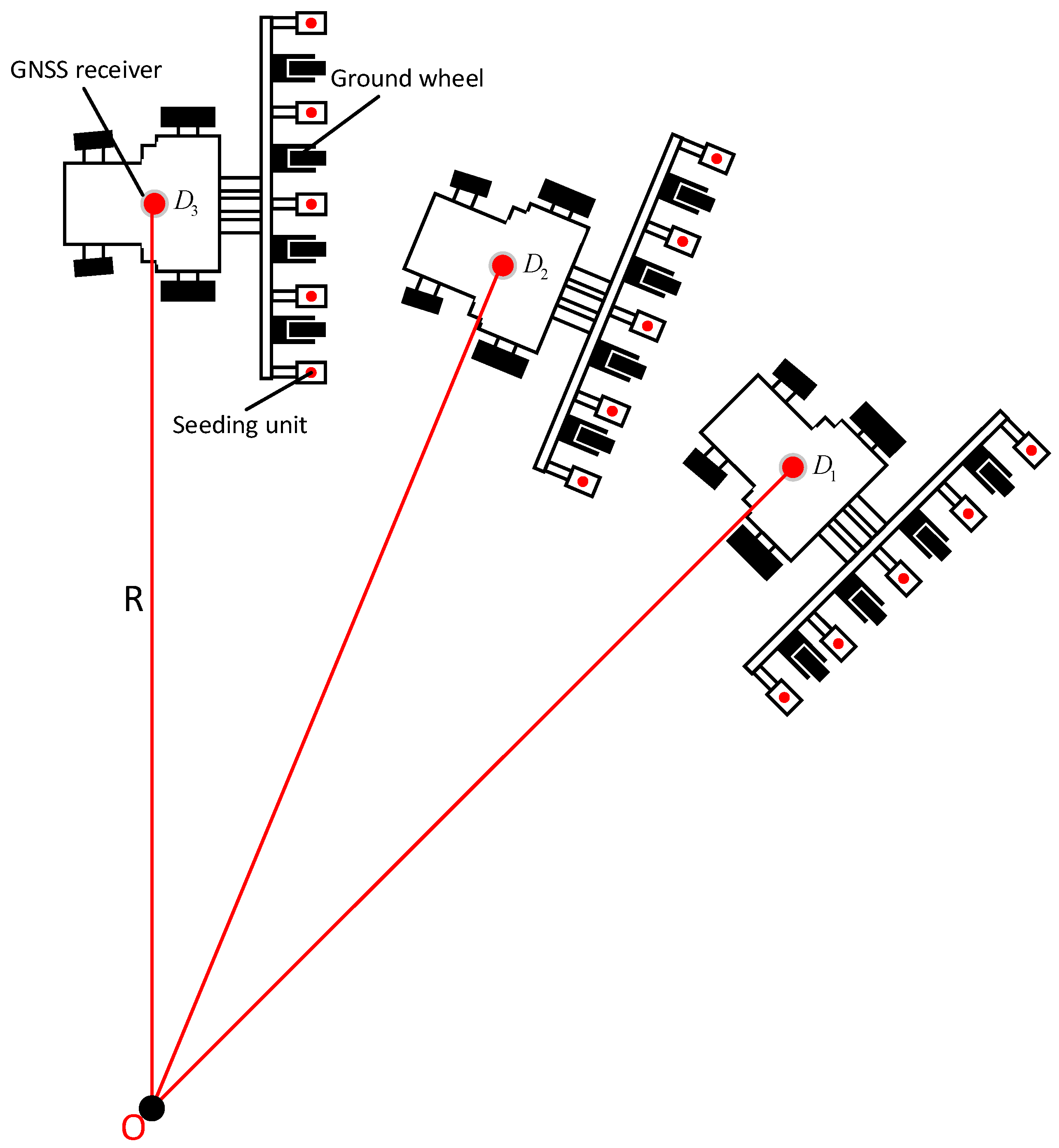
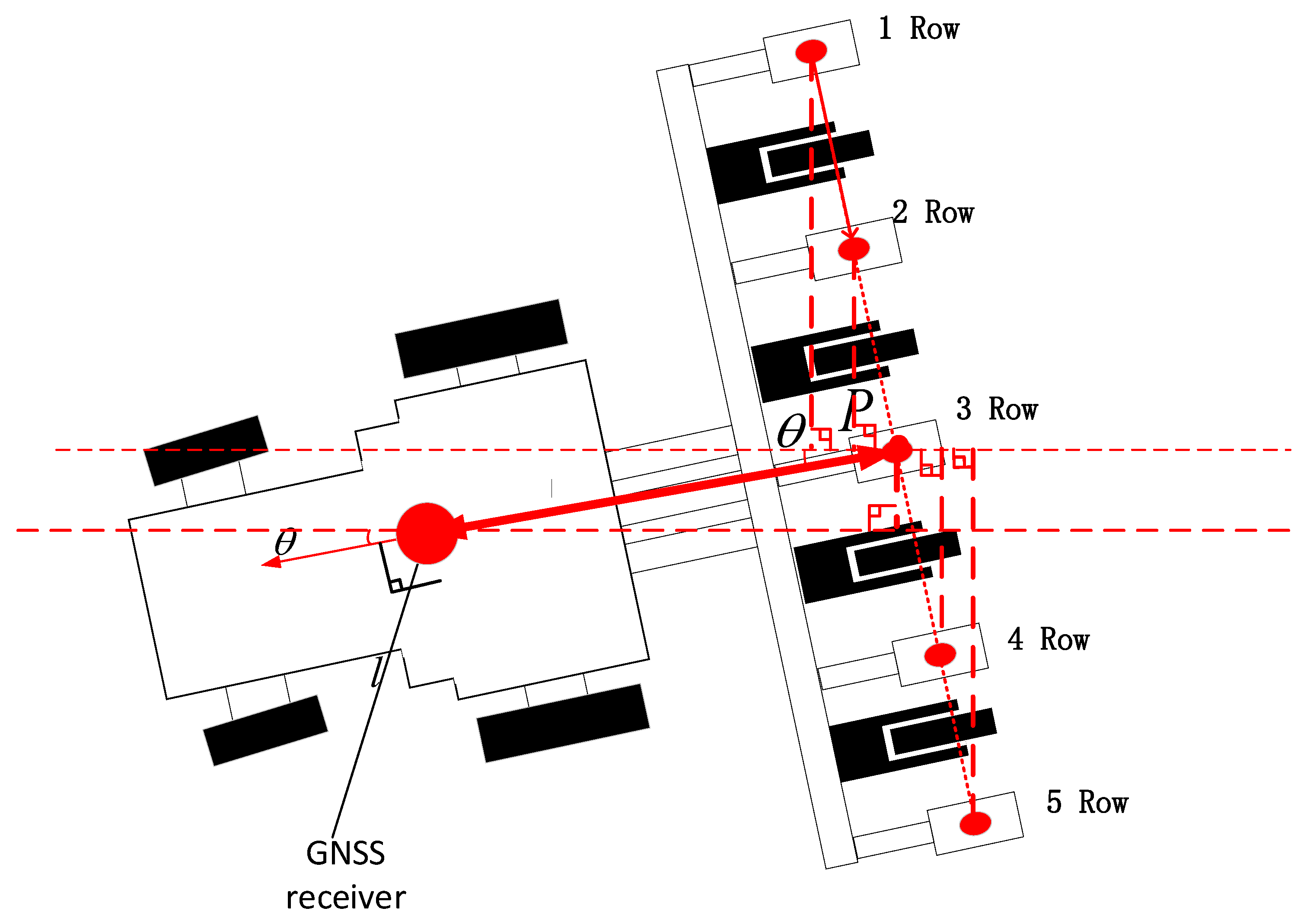
2.1. Calculation of Turning Radius and Center of Tractor
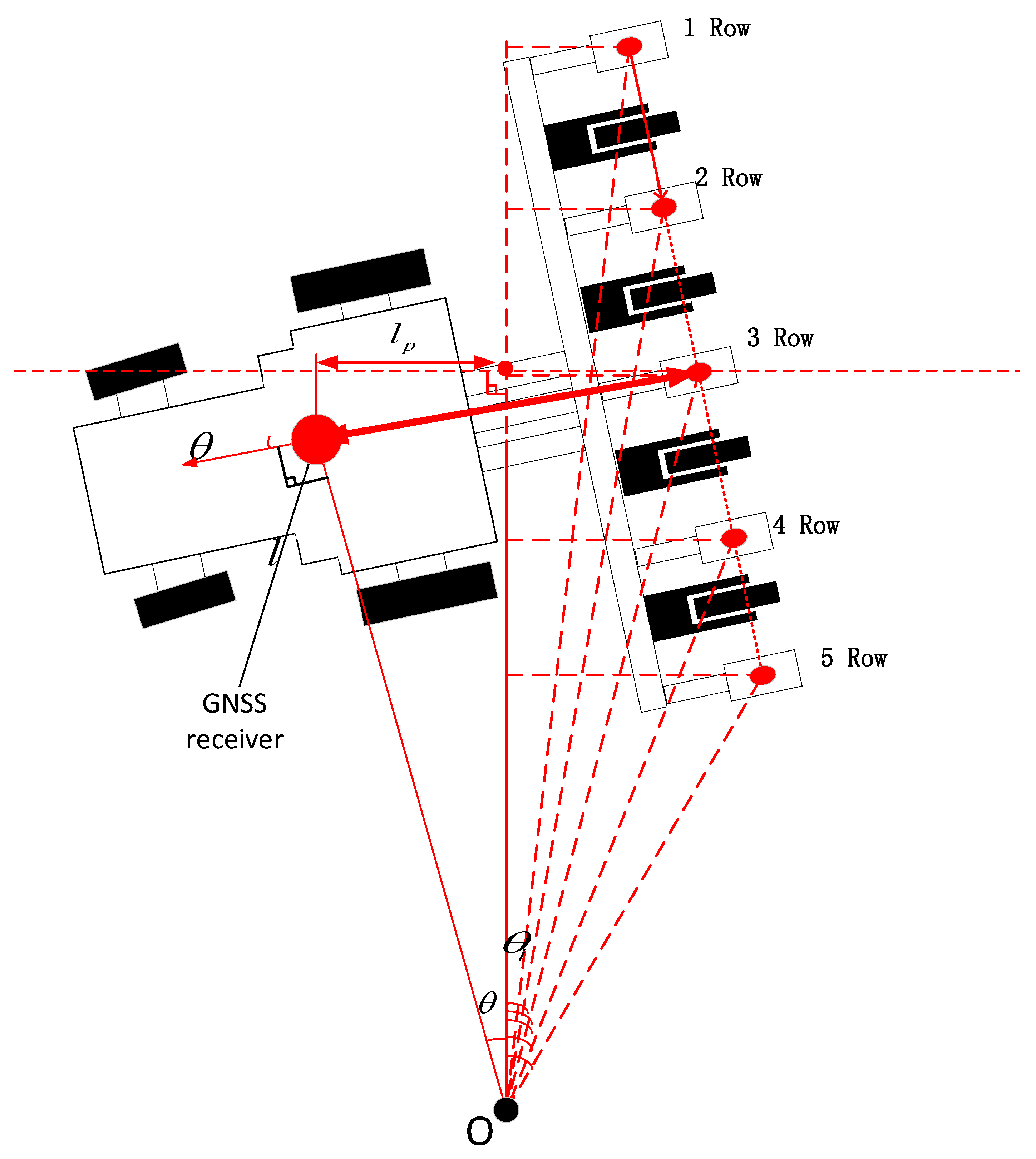
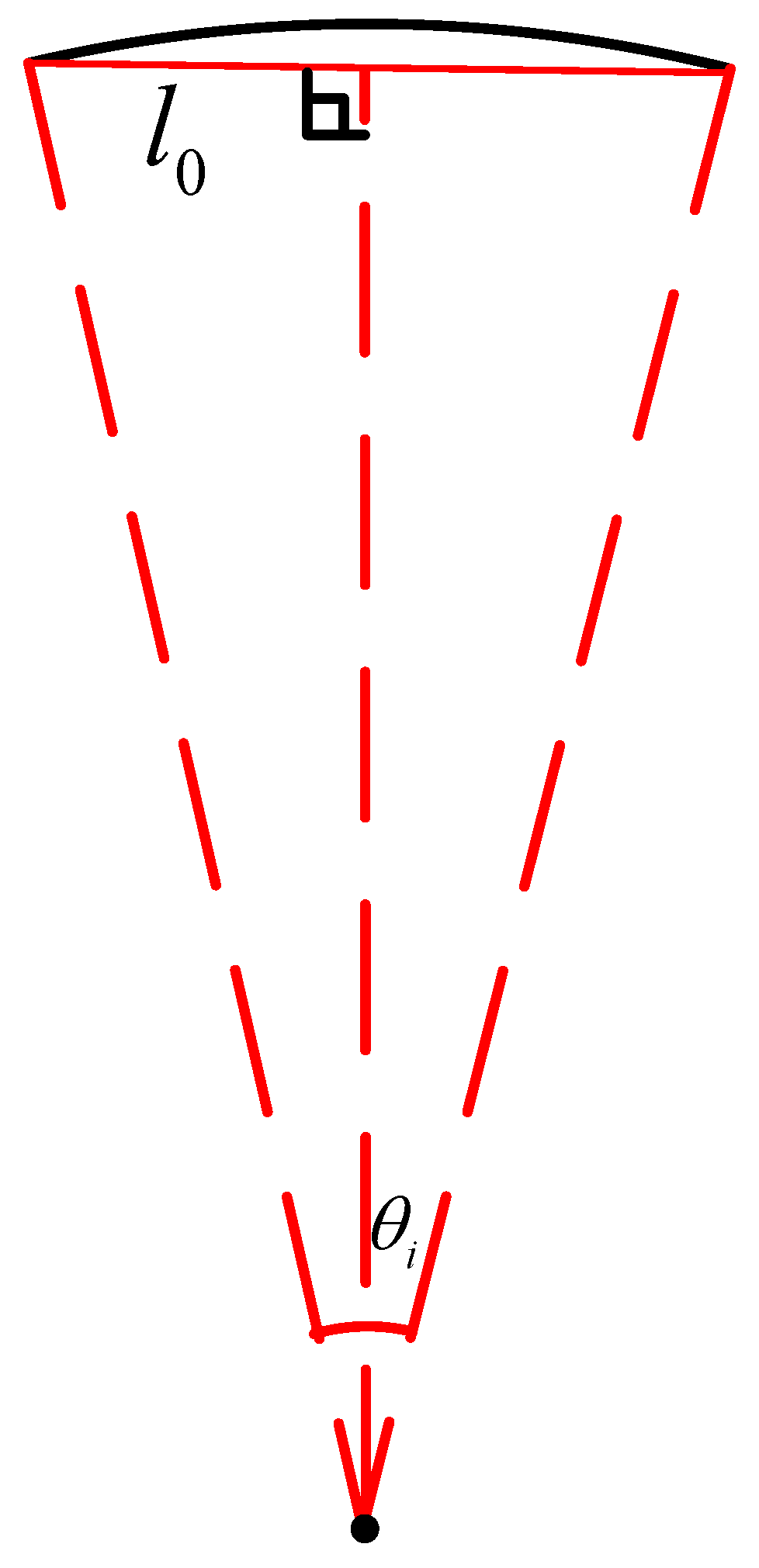
2.2. Calculation of Turning Radius of Individual Seeding Unit
2.3. Seeding Frequency of Individual Seeding Unit
2.4. Positioning of Individual Seeding Unit
3. Results
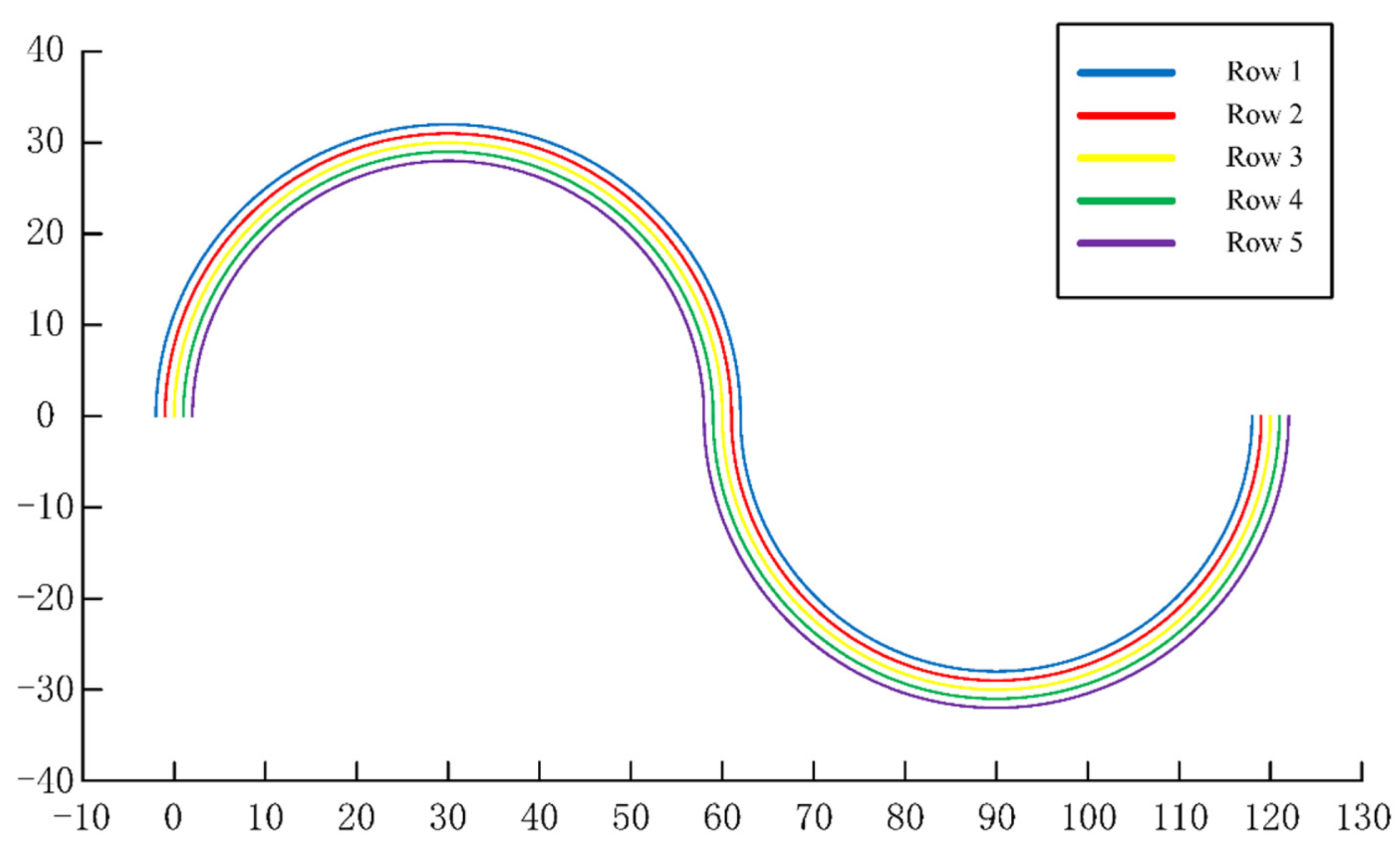
3.1. Simulation Model
3.2. Results and Analysis
4. Conclusions
- (1)
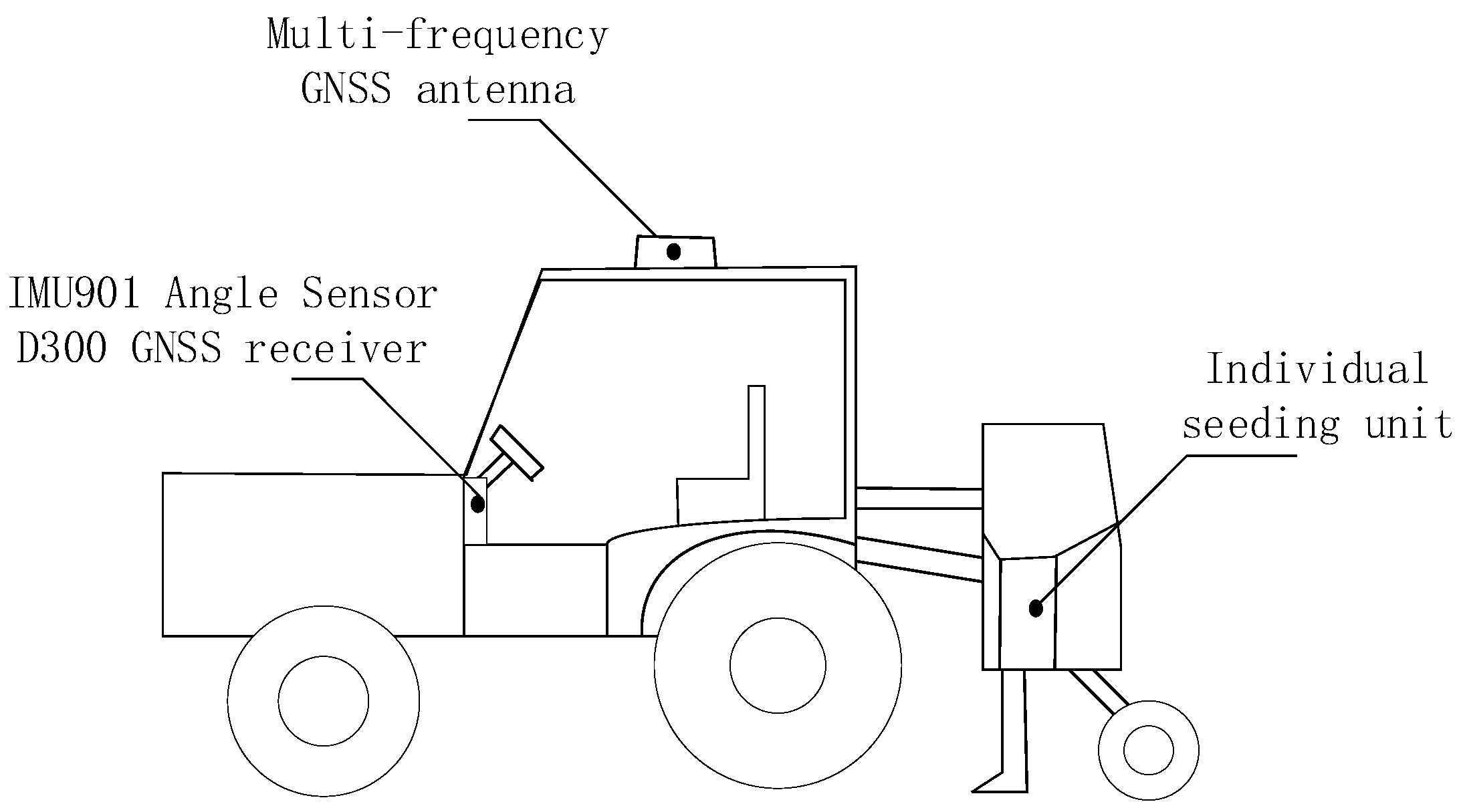
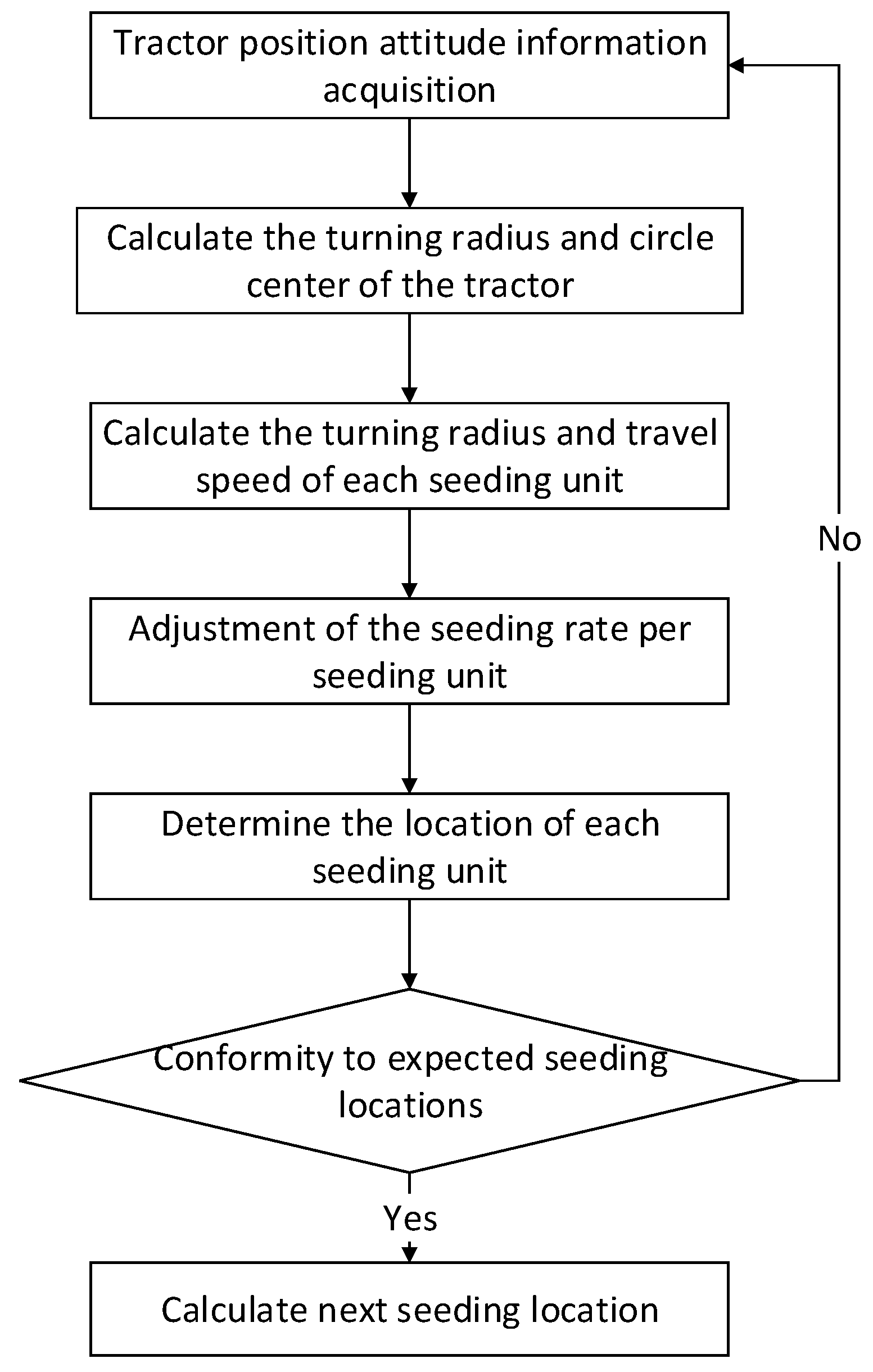
- A multi-sensor precise seeding calculation model was established, with which the real-time speed and position of individual seeding unit could be calculated according to the position and attitude information received by GNSS receiver and angle sensor to predict the next seeding position so as to achieve the goal of uniform seeding in curve area and increase the unit yield of crops.
- (2)
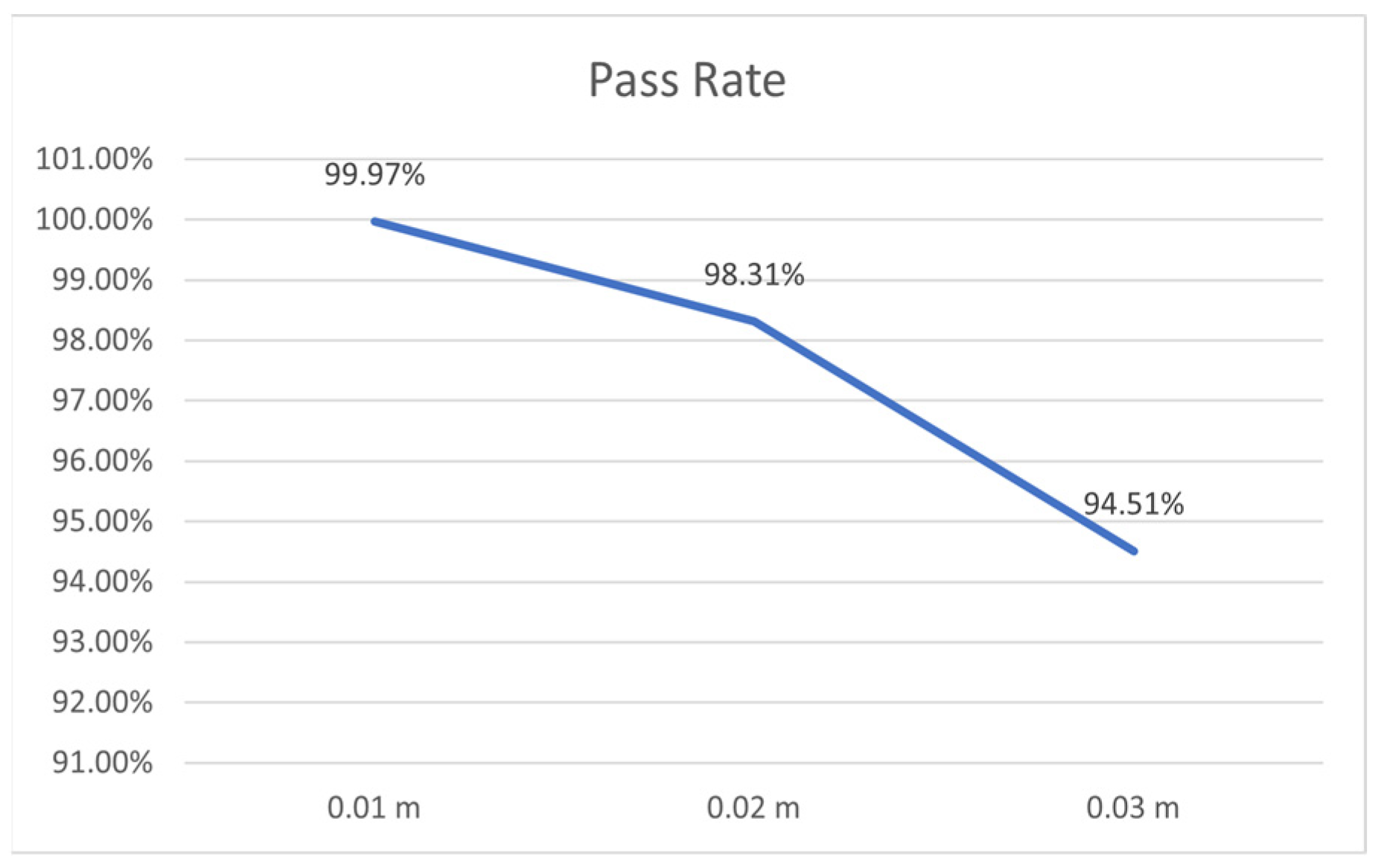
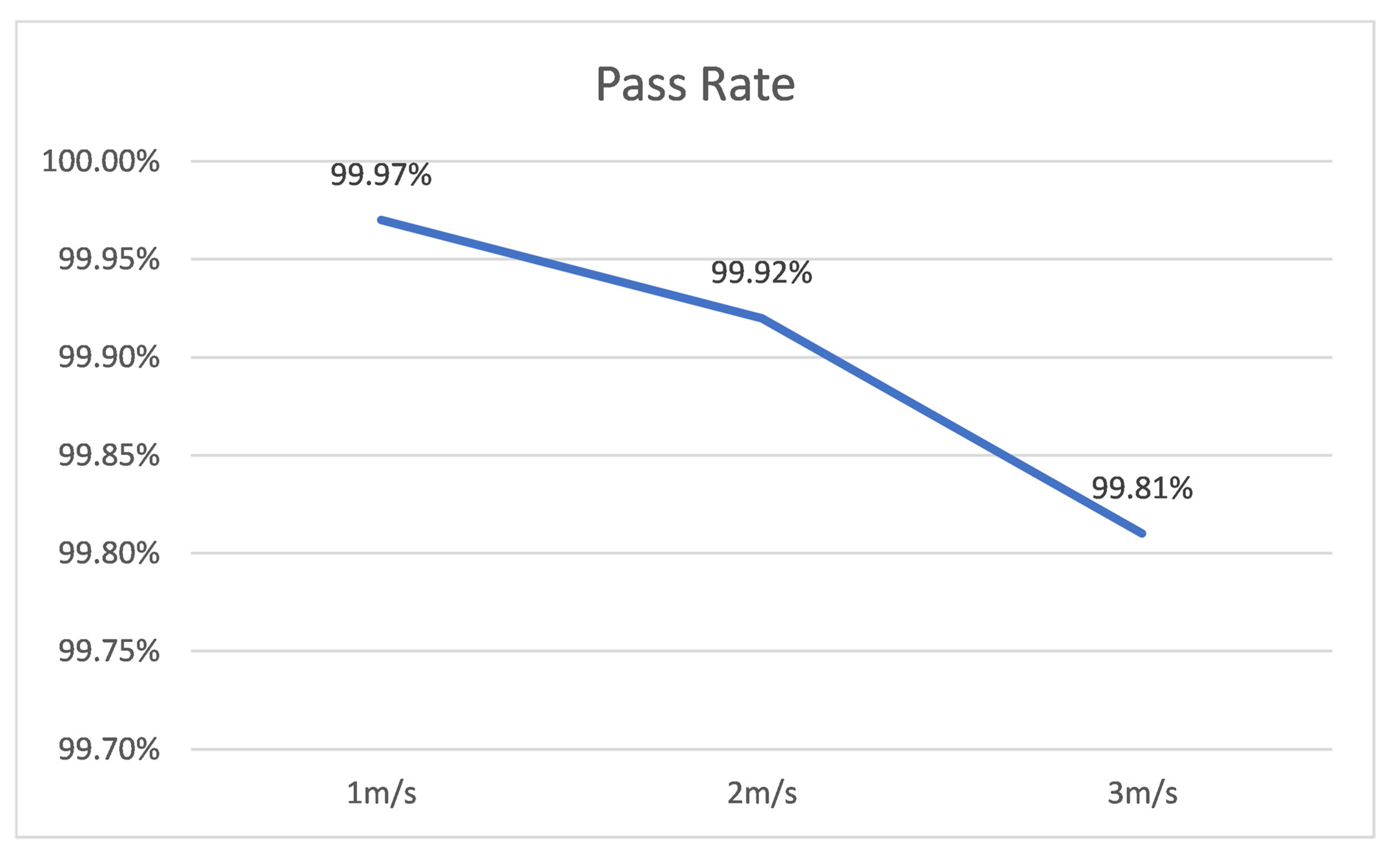
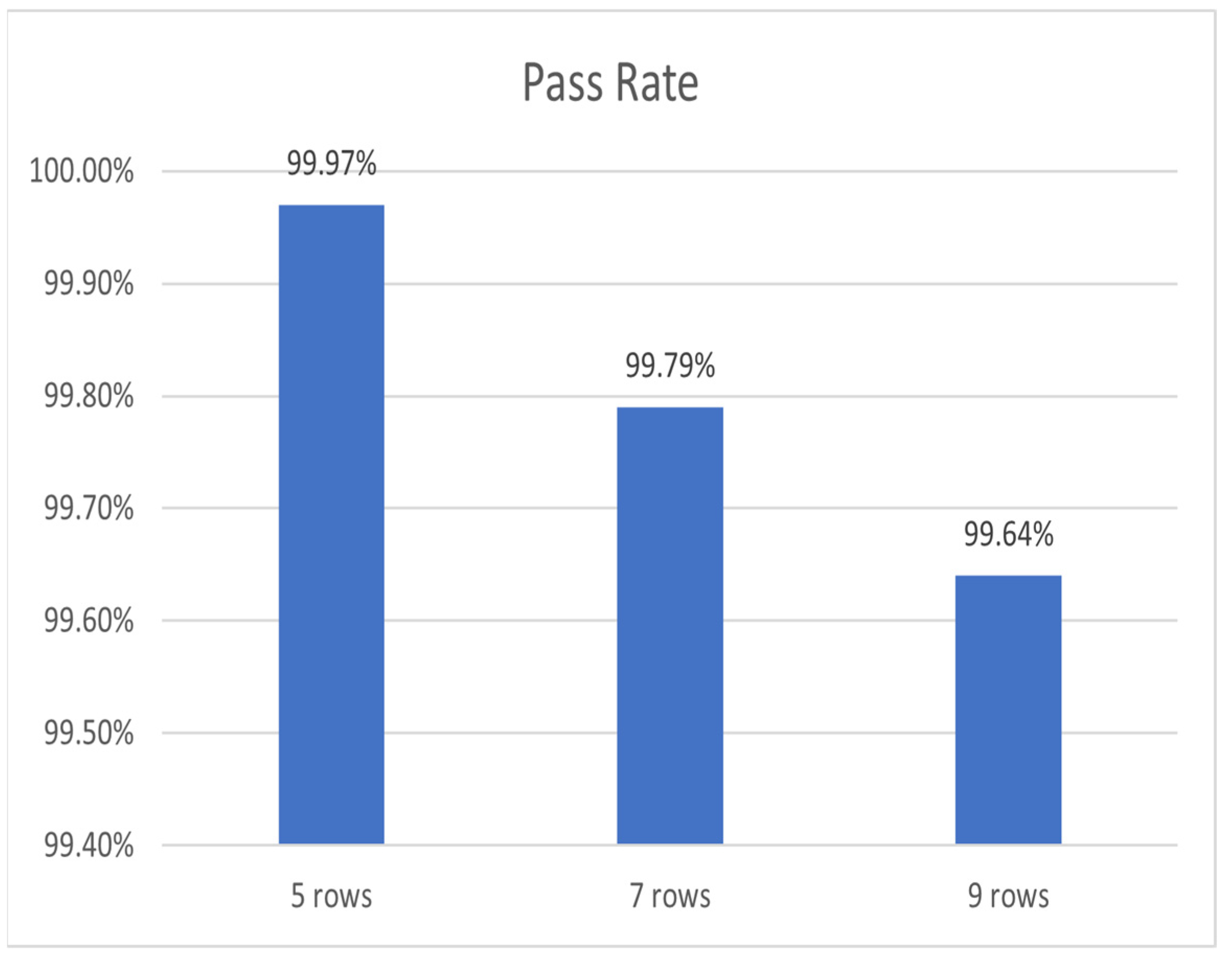
- Simulink simulation software was used to build a simulation model and provide simulation results for analysis in order to determine the correlation of positioning accuracy, traction speed, and number of seeding rows, respectively, with seeding quality. The experimental results showed that the algorithm could achieve the highest seeding qualification rate of 99.81% in the individual seeding units of a 5-row seeder with a positioning accuracy of and a traction speed of 1 m/s, and it could realize the compensation and positioning functions of a multi-row seeder.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ranum, P.; Pena-Rosas, J.P.; Garcia-Casal, M.N. Global Maize Production, Utilization, and Consumption. In Technical Considerations for Maize Flour and Corn Meal Fortification in Public Health; PenaRosas, J.P., GarciaCasal, M.N., Pachon, H., Eds.; Blackwell Science Publishing: Oxford, UK, 2014; Volume 1312, pp. 105–112. [Google Scholar]
- National Bureau of Statistics of China. China Statistical Yearbook 2021; China Statistics Press: Beijing, China, 2021.
- Yin, X.; Noguchi, N.; Yang, T.X.; Jin, C.Q. Development and evaluation of a low-cost precision seeding control system for a corn drill. Int. J. Agric. Biol. Eng. 2018, 11, 95–99. [Google Scholar] [CrossRef]
- He, X.; Ding, Y.; Zhang, D.; Yang, L.; Cui, T.; Zhong, X. Development of a variable-rate seeding control system for corn planters Part I: Design and laboratory experiment. Comput. Electron. Agric. 2019, 162, 318–327. [Google Scholar] [CrossRef]
- Zhan, Z.; Yaoming, L.; Jin, C.; Lizhang, X. Numerical analysis and laboratory testing of seed spacing uniformity performance for vacuum-cylinder precision seeder. Biosyst. Eng. 2010, 106, 344–351. [Google Scholar] [CrossRef]
- Wang, L.; Xiang, L.; Tang, L.; Jiang, H. A Convolutional Neural Network-Based Method for Corn Stand Counting in the Field. Sensors 2021, 21, 507. [Google Scholar] [CrossRef] [PubMed]
- Nate Dorsey + How To Avoid Yield Loss Using Curve Compensation. 2017. Available online: https://www.precisionag.com/market-watch/how-to-avoid-yield-loss-using-curve-compensation/ (accessed on 15 March 2017).
- Ag Leader + SureDrive Turn Compensation. 2018. Available online: https://www.agleader.com/blog/suredrive-turn-compensation/ (accessed on 5 March 2018).
- Shuo, Y.; Xiu, W.; Yuanyuan, G.; Changyuan, Z.; Xueguan, Z.; Chunjiang, Z. Investigation on Motor-driving Maize Precision Seed Meter System Supporting On-site Calibration of Rotate Speed of Seed Plate. Trans. Chin. Soc. Agric. Mach. 2020, 51, 47–55. [Google Scholar]
- Yin, Y.X.; Chen, L.P.; Meng, Z.J.; Li, B.; Luo, C.H.; Fu, W.Q.; Mei, H.B.; Qin, W.C. Design and evaluation of a maize monitoring system for precision planting. Int. J. Agric. Biol. Eng. 2018, 11, 186–192. [Google Scholar] [CrossRef]
- Wang, W.; Wu, K.; Zhang, Y.; Wang, M.; Zhang, C.; Chen, L. The Development of an Electric-Driven Control System for a High-Speed Precision Planter Based on the Double Closed-Loop Fuzzy PID Algorithm. Agronomy 2022, 12, 945. [Google Scholar] [CrossRef]
- He, X.T.; Ding, Y.Q.; Zhang, D.X.; Yang, L.; Cui, T.; Zhong, X.J. Development of a variable-rate seeding control system for corn planters Part II: Field performance. Comput. Electron. Agric. 2019, 162, 309–317. [Google Scholar] [CrossRef]
- Zuliani, D.; Tunini, L.; Di Traglia, F.; Chersich, M.; Curone, D. Cost-Effective, Single-Frequency GPS Network as a Tool for Landslide Monitoring. Sensors 2022, 22, 3526. [Google Scholar] [CrossRef] [PubMed]
- O′Reilly, O.M. On the computation of relative rotations and geometric phases in the motions of rigid bodies. J. Appl. Mech. Trans. ASME 1997, 64, 969–974. [Google Scholar] [CrossRef]
- Alonge, F.; Cusumano, P.; D’Ippolito, F.; Garraffa, G.; Livreri, P.; Sferlazza, A. Localization in Structured Environments with UWB Devices without Acceleration Measurements, and Velocity Estimation Using a Kalman–Bucy Filter. Sensors 2022, 22, 6308. [Google Scholar] [CrossRef] [PubMed]
- Kong, T.; Ma, L.; Ai, G. Research on Improving Satellite Positioning Precision Based on Multi-Frequency Navigation Signals. Sensors 2022, 22, 4210. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | ||||
|---|---|---|---|---|
| Values | 30 m | 1.5 m | 0.6 m | 0.2 m |
| Positioning | Traction | Seeding | N | Min. | Max. | Average | SD | |
|---|---|---|---|---|---|---|---|---|
| Accuracy | Speed | Number of Rows | (Statistical Data) | (Statistical Data) | (Statistical Data) | (Statistical Data) | (Standard Error) | (Statistical Data) |
| 0.01 m | 1 m/s | 5 | 4686 | 0.1729 | 0.237 | 0.201076 | 0.000205 | 0.009923 |
| 7 | 6560 | 0.1688 | 0.2327 | 0.201061 | 0.0001754 | 0.0100477 | ||
| 9 | 8450 | 0.1723 | 0.2341 | 0.200732 | 0.0001525 | 0.0099144 | ||
| 2 m/s | 5 | 4706 | 0.1688 | 0.2371 | 0.20023 | 0.0002246 | 0.0108954 | |
| 7 | 6580 | 0.1636 | 0.236 | 0.200565 | 0.0002087 | 0.0119688 | ||
| 9 | 8406 | 0.1619 | 0.2402 | 0.201788 | 0.0002035 | 0.0131936 | ||
| 3 m/s | 5 | 4710 | 0.1676 | 0.234 | 0.200174 | 0.0002208 | 0.0107129 | |
| 7 | 6594 | 0.164 | 0.2384 | 0.200172 | 0.0002135 | 0.0122606 | ||
| 9 | 8470 | 0.1641 | 0.2421 | 0.200361 | 0.0002113 | 0.013749 | ||
| 0.02 m | 1 m/s | 5 | 4688 | 0.1556 | 0.2526 | 0.201535 | 0.0003506 | 0.0169741 |
| 7 | 6566 | 0.1535 | 0.2541 | 0.201361 | 0.000304 | 0.017421 | ||
| 9 | 8446 | 0.1461 | 0.2518 | 0.201291 | 0.0002634 | 0.0171176 | ||
| 2 m/s | 5 | 4710 | 0.1523 | 0.2491 | 0.200689 | 0.0003642 | 0.0176743 | |
| 7 | 6570 | 0.1418 | 0.2638 | 0.201347 | 0.0003229 | 0.0185049 | ||
| 9 | 8408 | 0.1443 | 0.2581 | 0.202222 | 0.0002989 | 0.0193797 | ||
| 3 m/s | 5 | 4710 | 0.148 | 0.2495 | 0.200672 | 0.0003585 | 0.0173971 | |
| 7 | 6594 | 0.1412 | 0.255 | 0.200686 | 0.0003195 | 0.0183435 | ||
| 9 | 8470 | 0.1394 | 0.2654 | 0.200823 | 0.0003041 | 0.0197878 | ||
| 0.03 m | 1 m/s | 5 | 4696 | 0.1277 | 0.275 | 0.20208 | 0.0005268 | 0.0255279 |
| 7 | 6564 | 0.1218 | 0.2771 | 0.202276 | 0.0004371 | 0.0250404 | ||
| 9 | 8450 | 0.1304 | 0.2787 | 0.202072 | 0.000382 | 0.0248306 | ||
| 2 m/s | 5 | 4708 | 0.1244 | 0.2812 | 0.201541 | 0.000505 | 0.0244996 | |
| 7 | 6568 | 0.1224 | 0.2842 | 0.202191 | 0.0004626 | 0.0265097 | ||
| 9 | 8422 | 0.1201 | 0.2875 | 0.202883 | 0.0004106 | 0.0266453 | ||
| 3 m/s | 5 | 4710 | 0.1222 | 0.2749 | 0.201492 | 0.0005243 | 0.0254429 | |
| 7 | 6594 | 0.1195 | 0.28 | 0.201398 | 0.0004544 | 0.0260886 | ||
| 9 | 8466 | 0.1257 | 0.2859 | 0.201778 | 0.0004131 | 0.0268787 | ||
| Traction Speed | Positioning Accuracy | Seeding Pass Rate | ||
|---|---|---|---|---|
| 5 Rows | 7 Rows | 9 Rows | ||
| 3 m/s | 0.01 m | 99.81% | 99.61% | 99.12% |
| 0.02 m | 97.64% | 97.02% | 96.74% | |
| 0.03 m | 93.27% | 92.50% | 92.07% | |
| 2 m/s | 0.01 m | 99.92% | 99.68% | 99.51% |
| 0.02 m | 97.95% | 97.57% | 97.03% | |
| 0.03 m | 93.60% | 93.85% | 92.96% | |
| 1 m/s | 0.01 m | 99.97% | 99.79% | 99.64% |
| 0.02 m | 98.31% | 97.96% | 97.88% | |
| 0.03 m | 94.51% | 94.43% | 93.66% | |
| Factors | Correlation |
|---|---|
| Positioning accuracy | 0.938 |
| Traction speed | 0.905 |
| Number of seeding rows | 0.730 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Zhang, Y.; Zhang, Y.; Li, P.; Teng, G. Precision Seeding Compensation and Positioning Based on Multisensors. Sensors 2022, 22, 7228. https://doi.org/10.3390/s22197228
Sun J, Zhang Y, Zhang Y, Li P, Teng G. Precision Seeding Compensation and Positioning Based on Multisensors. Sensors. 2022; 22(19):7228. https://doi.org/10.3390/s22197228
Chicago/Turabian StyleSun, Jiaze, Yan Zhang, Yuting Zhang, Peize Li, and Guifa Teng. 2022. "Precision Seeding Compensation and Positioning Based on Multisensors" Sensors 22, no. 19: 7228. https://doi.org/10.3390/s22197228
APA StyleSun, J., Zhang, Y., Zhang, Y., Li, P., & Teng, G. (2022). Precision Seeding Compensation and Positioning Based on Multisensors. Sensors, 22(19), 7228. https://doi.org/10.3390/s22197228