
Power Spectrum of Acceleration and Angular Velocity Signals as Indicators of Muscle Fatigue during Upper Limb Low-Load Repetitive Tasks
 , and
, and
Abstract
:1. Introduction
2. Methods
2.1. Participants
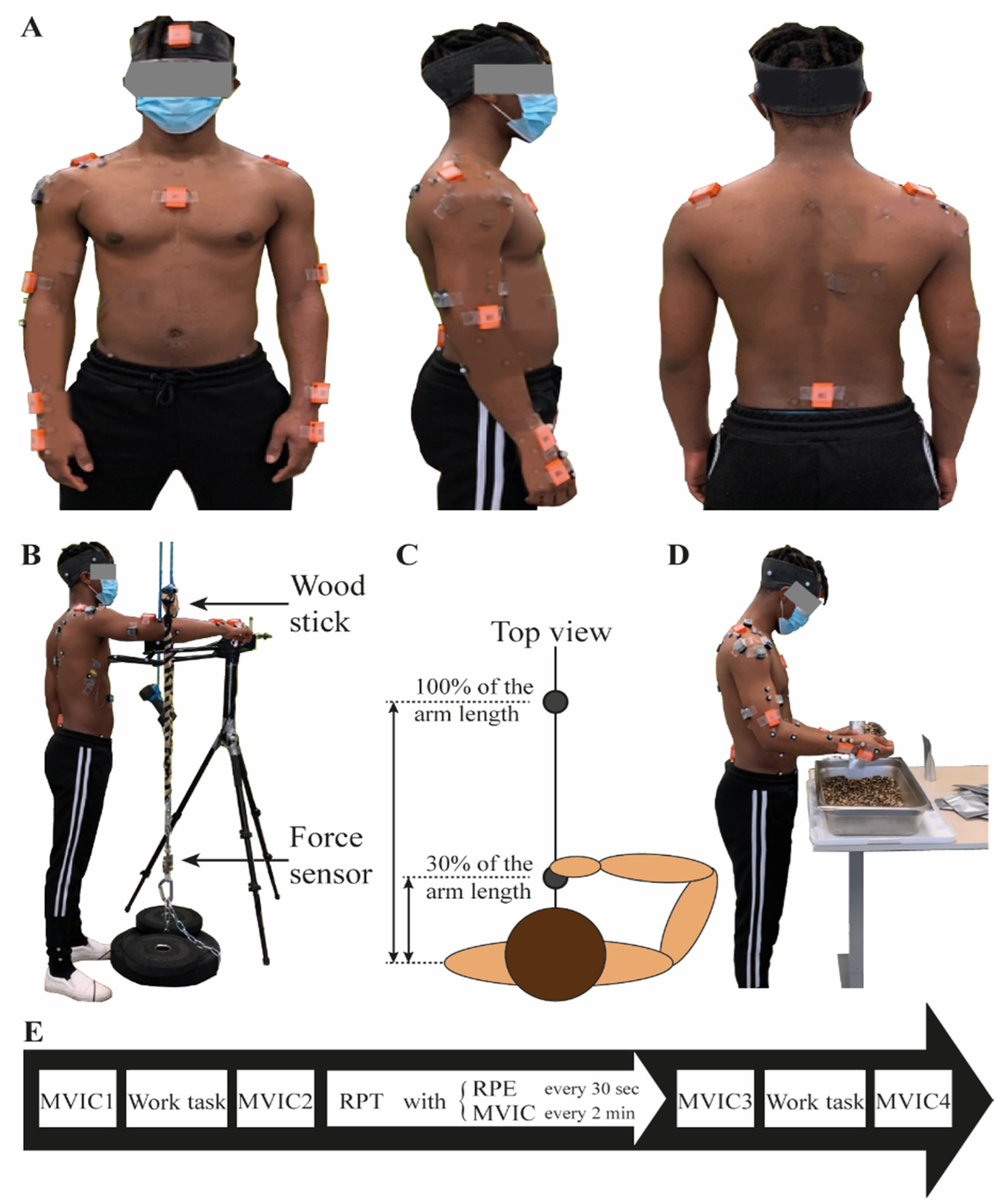
2.2. Instrumentation
2.3. Experimental Protocol
2.4. Data Processing
2.5. Statistical Analyses
3. Results
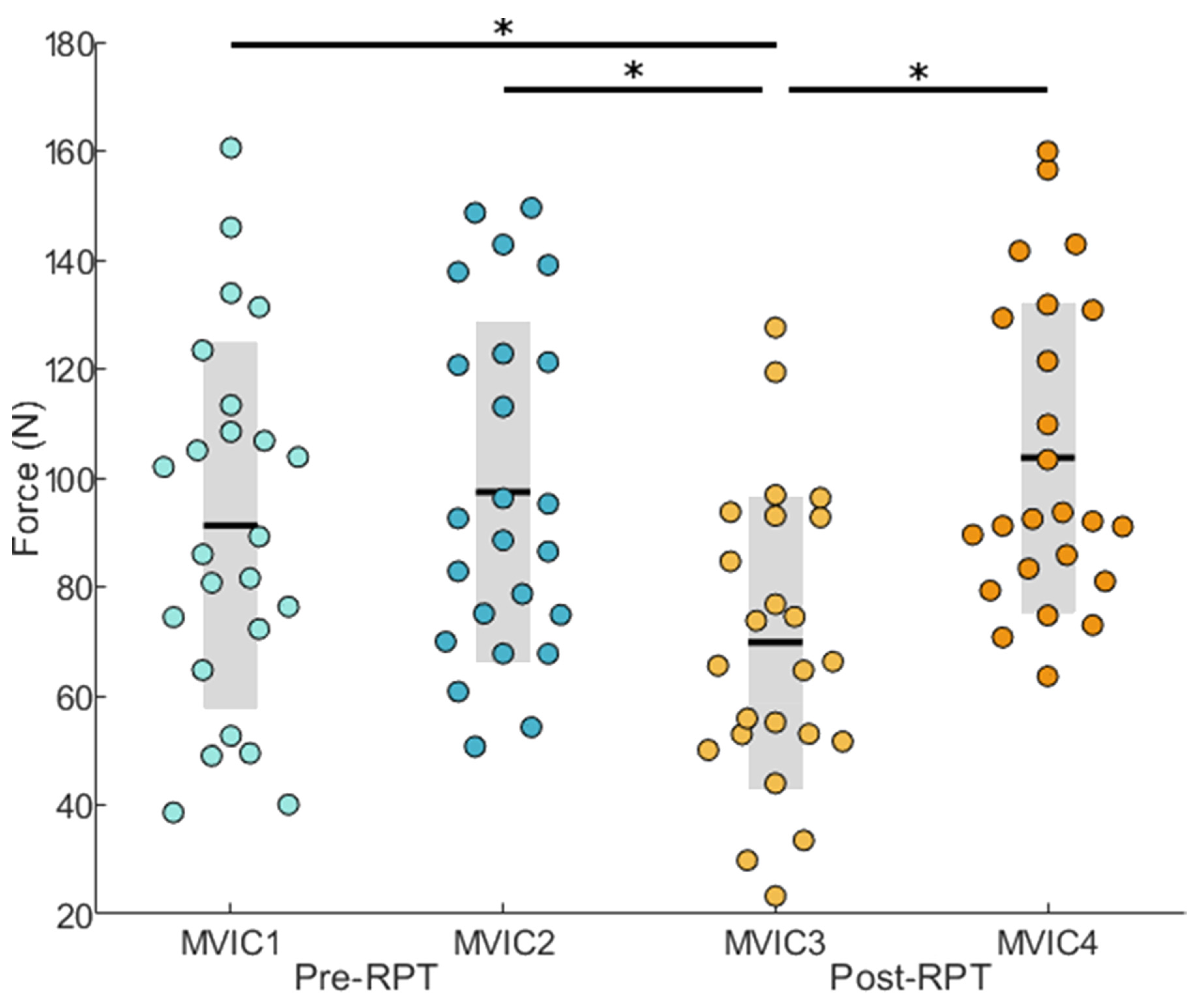
3.1. Maximum Voluntary Isometric Force
3.2. Repetitive Pointing Task
3.3. Work Task
4. Discussion
4.1. Repetitive Pointing Task
4.2. Work Task
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Michel, C.; Arcand, R.; Crevier, H.; Dovonou, N.; Martin, R.; Pelletier, P.; Phaneuf, R. Portrait national des troubles musculo-squelettiques. In Sociaux; Institut National de Santé Publique: Québec, QC, Canada, 2010; p. 40. [Google Scholar]
- Nordander, C.; Ohlsson, K.; Åkesson, I.; Arvidsson, I.; Balogh, I.; Hansson, G.-Å.; Strömberg, U.; Rittner, R.; Skerfving, S. Risk of musculoskeletal disorders among females and males in repetitive/constrained work. Ergonomics 2009, 52, 1226–1239. [Google Scholar] [CrossRef] [PubMed]
- Nordander, C.; Hansson, G.; Ohlsson, K.; Arvidsson, I.; Balogh, I.; Strömberg, U.; Rittner, R.; Skerfving, S. Exposure-response relationships for work-related neck and shoulder musculoskeletal disorders—Analyses of pooled uniform data sets. Appl. Ergon. 2016, 55, 70–84. [Google Scholar] [CrossRef]
- Santos, J.; Baptista, J.S.; Monteiro, P.R.R.; Miguel, A.S.; Santos, R.; Vaz, M.A.P. The influence of task design on upper limb muscles fatigue during low-load repetitive work: A systematic review. Int. J. Ind. Ergon. 2016, 52, 78–91. [Google Scholar] [CrossRef] [Green Version]
- Sogaard, K.; Christensen, H.; Jensen, B.R.; Finsen, L.; Sjogaard, G. Motor control and kinetics during low level concentric and eccentric contractions in man. Electroencephalogr. Clin. Neurophysiol. 1996, 101, 453–460. [Google Scholar] [CrossRef]
- Cote, J.N. Adaptations to neck/shoulder fatigue and injuries. Adv. Exp. Med. Biol. 2014, 826, 205–228. [Google Scholar] [PubMed]
- Sjøgaard, G.; Lundberg, U.; Kadefors, R. The role of muscle activity and mental load in the development of pain and degenerative processes at the muscle cell level during computer work. Eur. J. Appl. Physiol. 2000, 83, 99–105. [Google Scholar] [CrossRef]
- Lomond, K.V.; Côté, J.N. Shoulder functional assessments in persons with chronic neck/shoulder pain and healthy subjects: Reliability and effects of movement repetition. Work 2011, 38, 169–180. [Google Scholar] [CrossRef]
- Zhang, L.; Diraneyya, M.M.; Ryu, J.; Haas, C.T.; Abdel-Rahman, E.M. Jerk as an indicator of physical exertion and fatigue. Autom. Constr. 2019, 104, 120–128. [Google Scholar] [CrossRef]
- Cowley, J.C.; Gates, D.H. Inter-joint coordination changes during and after muscle fatigue. Hum. Mov. Sci. 2017, 56, 109–118. [Google Scholar] [CrossRef] [PubMed]
- Asgari, N.; Sanjari, M.A.; Esteki, A. Local dynamic stability of the spine and its coordinated lower joints during repetitive Lifting: Effects of fatigue and chronic low back pain. Hum. Mov. Sci. 2017, 54, 339–346. [Google Scholar] [CrossRef]
- Dupuis, F.; Sole, G.; Wassinger, C.; Bielmann, M.; Bouyer, L.J.; Roy, J.S. Fatigue, induced via repetitive upper-limb motor tasks, influences trunk and shoulder kinematics during an upper limb reaching task in a virtual reality environment. PLoS ONE 2021, 16, e0249403. [Google Scholar] [CrossRef]
- Gates, D.H.; Dingwell, J.B. The effects of muscle fatigue and movement height on movement stability and variability. Exp. Brain Res. 2011, 209, 525–536. [Google Scholar] [CrossRef]
- Yang, C.; Leitkam, S.; Côté, J.N. Effects of different fatigue locations on upper body kinematics and inter-joint coordination in a repetitive pointing task. PLoS ONE 2020, 14, e0227247. [Google Scholar] [CrossRef] [PubMed]
- Côté, J.N.; Mathieu, P.A.; Levin, M.F.; Feldman, A.G. Movement reorganization to compensate for fatigue during sawing. Exp. Brain Res. 2002, 146, 394–398. [Google Scholar] [CrossRef]
- Fuller, J.R.; Lomond, K.V.; Fung, J.; Cote, J.N. Posture-movement changes following repetitive motion-induced shoulder muscle fatigue. J. Electromyogr. Kinesiol. Off. J. Int. Soc. Electrophysiol. Kinesiol. 2009, 19, 1043–1052. [Google Scholar] [CrossRef] [PubMed]
- Bolink, S.A.A.N.; Naisas, H.; Senden, R.; Essers, H.; Heyligers, I.C.; Meijer, K.; Grimm, B. Validity of an inertial measurement unit to assess pelvic orientation angles during gait, sit–stand transfers and step-up transfers: Comparison with an optoelectronic motion capture system. Med. Eng. Phys. 2016, 38, 225–231. [Google Scholar] [CrossRef]
- Bauer, C.M.; Rast, F.M.; Ernst, M.J.; Kool, J.; Oetiker, S.; Rissanen, S.M.; Suni, J.H.; Kankaanpää, M. Concurrent validity and reliability of a novel wireless inertial measurement system to assess trunk movement. J. Electromyogr. Kinesiol. 2015, 25, 782–790. [Google Scholar] [CrossRef] [Green Version]
- Goubault, E. Inertial Measurement Units and Partial Least Square Regression to Predict Perceived Exertion during Repetitive Fatiguing Piano Tasks. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4053768 (accessed on 13 October 2022).
- Chan, V.C.H.; Beaudette, S.M.; Smale, K.B.; Beange, K.H.E.; Graham, R.B. A Subject-Specific Approach to Detect Fatigue-Related Changes in Spine Motion Using Wearable Sensors. Sensors 2020, 20, 2646. [Google Scholar] [CrossRef] [PubMed]
- Cavuoto, L.; Megahed, F. Understanding Fatigue and The Implications for Worker Safety. In ASSE Professional Development Conference and Exposition, 2016; American Society of Safety Engineers: Des Plaines, IL, USA, 2016. [Google Scholar]
- Kang, H.G.; Mahoney, D.F.; Hoenig, H.; Hirth, V.A.; Bonato, P.; Hajjar, I.; Lipsitz, L.A.; Center for Integration of Medicine and Innovative Technology Working Group on Advanced Approaches to Physiologic Monitoring for the Aged. In Situ Monitoring of Health in Older Adults: Technologies and Issues. J. Am. Geriatr. Soc. 2010, 58, 1579–1586. [Google Scholar] [CrossRef]
- Goubault, E.; Nguyen, H.P.; Bogard, S.; Blanchet, P.J.; Bezard, E.; Vincent, C.; Sarna, J.; Monchi, O.; Duval, C. Remnants of Cardinal Symptoms of Parkinson’s Disease, Not Dyskinesia, Are Problematic for Dyskinetic Patients Performing Activities of Daily Living. Front. Neurol. 2019, 10, 256. [Google Scholar] [CrossRef]
- Lebel, K.; Boissy, P.; Nguyen, H.; Duval, C. Autonomous quality control of joint orientation measured with inertial sensors. Sensors 2016, 16, 1037. [Google Scholar] [CrossRef] [Green Version]
- Seel, T.; Raisch, J.; Schauer, T. IMU-Based Joint Angle Measurement for Gait Analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [Green Version]
- Jaskot, K.; Babiarz, A. The inertial measurement unit for detection of position. Prz. Elektrotechniczny 2010, 86, 323–333. [Google Scholar]
- Zhao, J. A Review of Wearable IMU (Inertial-Measurement-Unit)-based Pose Estimation and Drift Reduction Technologies. J. Phys. Conf. Ser. 2018, 1087, 042003. [Google Scholar] [CrossRef]
- Lebel, K.; Boissy, P.; Hamel, M.; Duval, C. Inertial measures of motion for clinical biomechanics: Comparative assessment of accuracy under controlled conditions–changes in accuracy over time. PLoS ONE 2015, 10, e0118361. [Google Scholar] [CrossRef] [PubMed]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Validation of inertial measurement units with an optoelectronic system for whole-body motion analysis. Med. Biol. Eng. Comput. 2017, 55, 609–619. [Google Scholar] [CrossRef]
- Cereatti, A.; Della Croce, U.; Sabatini, A.M. Three-Dimensional Human Kinematic Estimation Using Magneto-Inertial Measurement Units. In Handbook of Human Motion; Müller, B., Wolf, S.I., Brueggemann, G.-P., Deng, Z., McIntosh, A., Miller, F., Selbie, W.S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 1–24. [Google Scholar]
- Tomczak, A.; Gajewski, J.; Mazur–Różycka, J. Changes in physiological tremor resulting from sleep deprivation under conditions of increasing fatigue during prolonged military training. Biol. Sport 2014, 31, 303. [Google Scholar] [CrossRef] [Green Version]
- Gajewski, J. Fatigue-induced changes in tremor caused by physical efforts of different volume and intensity. Acta Bioeng. Biomech. 2006, 8, 103. [Google Scholar]
- Ebenbichler, G.R.; Kollmitzer, J.; Erim, Z.; Löscher, W.N.; Kerschan, K.; Posch, M.; Nowotny, T.; Kranzl, A.; Wöber, C.; Bochdansky, T. Load-dependence of fatigue related changes in tremor around 10 Hz. Clin. Neurophysiol. 2000, 111, 106–111. [Google Scholar] [CrossRef]
- Viitasalo, J.; Gajewski, J. Effects of strength training-induced fatigue on tremor spectrum in elbow flexion. Hum. Mov. Sci. 1994, 13, 129–141. [Google Scholar] [CrossRef]
- Bouffard, J.; Yang, C.; Begon, M.; Côté, J. Sex differences in kinematic adaptations to muscle fatigue induced by repetitive upper limb movements. Biol. Sex Differ. 2018, 9, 17. [Google Scholar] [CrossRef] [PubMed]
- Yung, M. Fatigue at the Workplace: Measurement and Temporal Development. 2016. Available online: http://hdl.handle.net/10012/10119 (accessed on 13 October 2022).
- Gatti, U.C.; Schneider, S.; Migliaccio, G.C. Physiological condition monitoring of construction workers. Autom. Constr. 2014, 44, 227–233. [Google Scholar] [CrossRef]
- Xsens. Xsens Tutorial. Available online: https://tutorial.xsens.com (accessed on 13 October 2022).
- Yang, C.; Bouffard, J.; Srinivasan, D.; Ghayourmanesh, S.; Cantú, H.; Begon, M.; Côté, J.N. Changes in movement variability and task performance during a fatiguing repetitive pointing task. J. Biomech. 2018, 76, 212–219. [Google Scholar] [CrossRef]
- Borg, G.A. Psychophysical bases of perceived exertion. Med. Sci. Sport. Exerc. 1982, 14, 377–381. [Google Scholar] [CrossRef]
- Kim, S.; Nussbaum, M.A. Performance evaluation of a wearable inertial motion capture system for capturing physical exposures during manual material handling tasks. Ergonomics 2013, 56, 314–326. [Google Scholar] [CrossRef]
- Lakens, D. Calculating and reporting effect sizes to facilitate cumulative science: A practical primer for t-tests and ANOVAs. Front. Psychol. 2013, 4, 863. [Google Scholar] [CrossRef] [Green Version]
- Vøllestad, N.K. Measurement of human muscle fatigue. J. Neurosci. Methods 1997, 74, 219–227. [Google Scholar] [CrossRef]
- Enoka, R.M.; Stuart, D.G. Neurobiology of muscle fatigue. J. Appl. Physiol. 1992, 72, 1631–1648. [Google Scholar] [CrossRef]
- Pageaux, B. Perception of effort in Exercise Science: Definition, measurement and perspectives. Eur. J. Sport Sci. 2016, 16, 885–894. [Google Scholar] [CrossRef]
- Nardone, A.; Tarantola, J.; Giordano, A.; Schieppati, M. Fatigue effects on body balance. Electroencephalogr. Clin. Neurophysiol. Electromyogr. Mot. Control 1997, 105, 309–320. [Google Scholar] [CrossRef]
- Cid, M.M.; Côté, J.N.; Zancanaro, L.L.; Oliveira, A.B. Sex differences in postures of the upper body during a simulated work task performed above shoulder level. J. Biomech. 2020, 107, 109855. [Google Scholar] [CrossRef] [PubMed]
- Madeleine, P. On functional motor adaptations: From the quantification of motor strategies to the prevention of musculoskeletal disorders in the neck–shoulder region. Acta Physiol. 2010, 199, 1–46. [Google Scholar] [CrossRef] [PubMed]
- Lippold, O. The tremor in fatigue. Ciba Found. Symp. 1981, 82, 234–248. [Google Scholar] [PubMed]
- Kouzaki, M.; Masani, K. Postural sway during quiet standing is related to physiological tremor and muscle volume in young and elderly adults. Gait Posture 2012, 35, 11–17. [Google Scholar] [CrossRef]
- Enoka, R.M. Mechanisms of muscle fatigue: Central factors and task dependency. J. Electromyogr. Kinesiol. 1995, 5, 141–149. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Head | Sternum | Pelvis | Shoulder | Arm | Forearm | Hand | |||
|---|---|---|---|---|---|---|---|---|---|
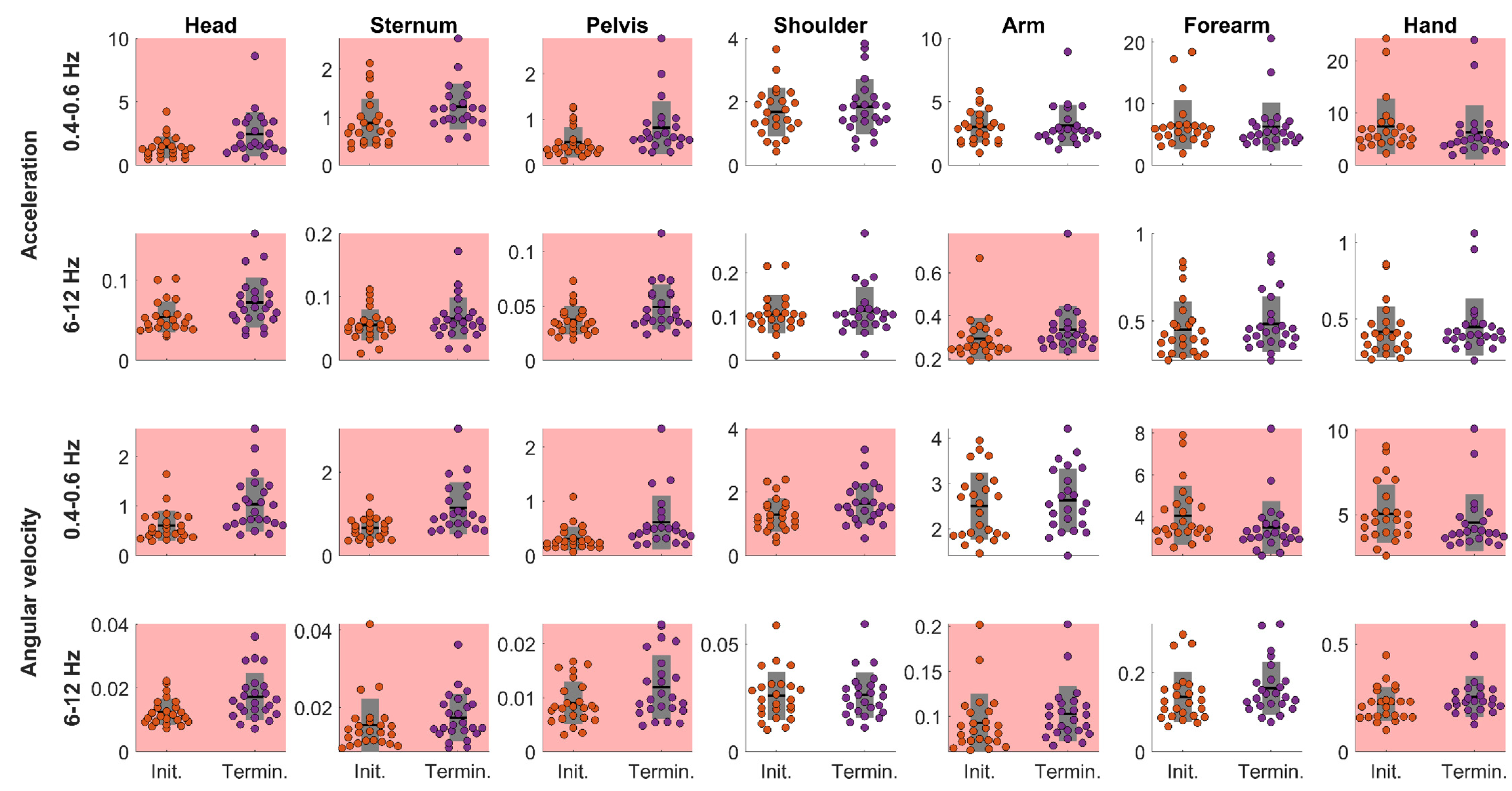
| RPT | Acc. | 0.4–0.6 Hz | t23 = −4.139 p < 0.001 Coh. d = 0.77 | t23 = −2.955 p = 0.008 Coh. d = 0.69 | t23 = −2.760 p = 0.011 Coh. d = 0.67 | t23 = −1.215 p = 0.237 Coh. d = 0.21 | t23 = −0.242 p = 0.811 Coh. d = 0.08 | t23 = 0.678 p = 0.505 Coh. d = −0.08 | t23 = 2.419 p = 0.024 Coh. d = −0.22 |
| 6–12 Hz | t23 = −3.656 p = 0.001 Coh. d = 0.69 | t23 = −2.370 p = 0.027 Coh. d = 0.34 | t23 = −3.992 p < 0.001 Coh. d = 0.70 | t23 = −1.442 p = 0.163 Coh. d = 0.15 | t23 = −3.994 p < 0.001 Coh. d = 0.42 | t23 = −1.141 p = 0.266 Coh. d = 0.20 | t23 = −1.409 p = 0.172 Coh. d = 0.18 | ||
| Angular velocity | 0.4–0.6 Hz | t23 = −6.103 p < 0.001 Coh. d = 0.98 | t23 = −4.637 p < 0.001 Coh. d = 1.01 | t23 = −3.499 p = 0.002 Coh. d = 0.78 | t23 = −4.533 p < 0.001 Coh. d = 0.60 | t23 = −1.002 p = 0.327 Coh. d = 0.18 | t23 = 3.370 p = 0.003 Coh. d = −0.43 | t23 = 2.366 p = 0.027 Coh. d = −0.32 | |
| 6–12 Hz | t23 = −3.754 p = 0.001 Coh. d = 0.79 | t23 = −2.211 p = 0.037 Coh. d = 0.29 | t23 = −3.866 p < 0.001 Coh. d = 0.58 | t23 = −0.308 p = 0.761 Coh. d = 0.03 | t23 = −2.862 p = 0.009 Coh. d = 0.31 | t23 = −1.606 p = 0.122 Coh. d = 0.34 | t23 = −2.323 p = 0.029 Coh. d = 0.38 | ||
| Work task | Acc. | 0.1–4 Hz | t23 = −2.526 p = 0.019 Coh. d = 0.35 | t23 = −2.474 p = 0.021 Coh. d = 0.26 | t23 = −2.121 p = 0.045 Coh. d = 0.28 | t23 = −2.005 p = 0.057 Coh. d = 0.18 | t23 = −2.256 p = 0.034 Coh. d = 0.18 | t23 = −1.350 p = 0.190 Coh. d = 0.12 | t23 = −1.726 p = 0.098 Coh. d = 0.15 |
| 6–12 Hz | t23 = 0.637 p = 0.531 Coh. d = −0.04 | t23 = 0.052 p = 0.959 Coh. d = 0.00 | t23 = 0.409 p = 0.686 Coh. d = −0.02 | t23 = 0.503 p = 0.620 Coh. d = −0.02 | t23 = −0.164 p = 0.872 Coh. d = 0.01 | t23 = −1.311 p = 0.203 Coh. d = 0.09 | t23 = −1.168 p = 0.255 Coh. d = 0.08 | ||
| Angular velocity | 0.1–4 Hz | t23 = −2.419 p = 0.024 Coh. d = 0.26 | t23 = −2.541 p = 0.018 Coh. d = 0.33 | t23 = −3.102 p = 0.005 Coh. d = 0.35 | t23 = −2.011 p = 0.056 Coh. d = 0.20 | t23 = −2.493 p = 0.020 Coh. d = 0.22 | t23 = −1.399 p = 0.175 Coh. d = 0.12 | t23 = −1.555 p = 0.134 Coh. d = 0.15 | |
| 6–12 Hz | t23 = 0.004 p = 0.999 Coh. d = 0.00 | t23 = −0.603 p = 0.552 Coh. d = 0.05 | t23 = −0.681 p = 0.503 Coh. d = 0.06 | t23 = 0.343 p = 0.735 Coh. d = −0.02 | t23 = −0.997 p = 0.329 Coh. d = 0.07 | t23 = −1.690 p = 0.104 Coh. d = 0.13 | t23 = −2.433 p = 0.023 Coh. d = 0.17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moyen-Sylvestre, B.; Goubault, É.; Begon, M.; Côté, J.N.; Bouffard, J.; Dal Maso, F. Power Spectrum of Acceleration and Angular Velocity Signals as Indicators of Muscle Fatigue during Upper Limb Low-Load Repetitive Tasks. Sensors 2022, 22, 8008. https://doi.org/10.3390/s22208008
Moyen-Sylvestre B, Goubault É, Begon M, Côté JN, Bouffard J, Dal Maso F. Power Spectrum of Acceleration and Angular Velocity Signals as Indicators of Muscle Fatigue during Upper Limb Low-Load Repetitive Tasks. Sensors. 2022; 22(20):8008. https://doi.org/10.3390/s22208008
Chicago/Turabian StyleMoyen-Sylvestre, Béatrice, Étienne Goubault, Mickaël Begon, Julie N. Côté, Jason Bouffard, and Fabien Dal Maso. 2022. "Power Spectrum of Acceleration and Angular Velocity Signals as Indicators of Muscle Fatigue during Upper Limb Low-Load Repetitive Tasks" Sensors 22, no. 20: 8008. https://doi.org/10.3390/s22208008
APA StyleMoyen-Sylvestre, B., Goubault, É., Begon, M., Côté, J. N., Bouffard, J., & Dal Maso, F. (2022). Power Spectrum of Acceleration and Angular Velocity Signals as Indicators of Muscle Fatigue during Upper Limb Low-Load Repetitive Tasks. Sensors, 22(20), 8008. https://doi.org/10.3390/s22208008