



AI-Based Positioning with Input Parameter Optimization in Indoor VLC Environments

Abstract
:1. Introduction
- This work considers the LOS and NLOS scenarios together in a VLC environment and proposes a user-positioning method for locating the user by performing AI-based RSS measurements.
- Under the fingerprinting technique, an AI-based solution is proposed to alleviate the problem of increase in processing time with an increase in the number of RPs. First, after measuring the RSS at the RPs for user positioning, the WkNN component is executed to approximate the user’s location, then, the DNN model is trained using these approximate user location as the input data.
- The proposed DNN model outputs the user’s final position and the simulation results obtained herein confirm that its positioning accuracy is superior to that of the existing WkNN and triangulation scheme.
2. System Model
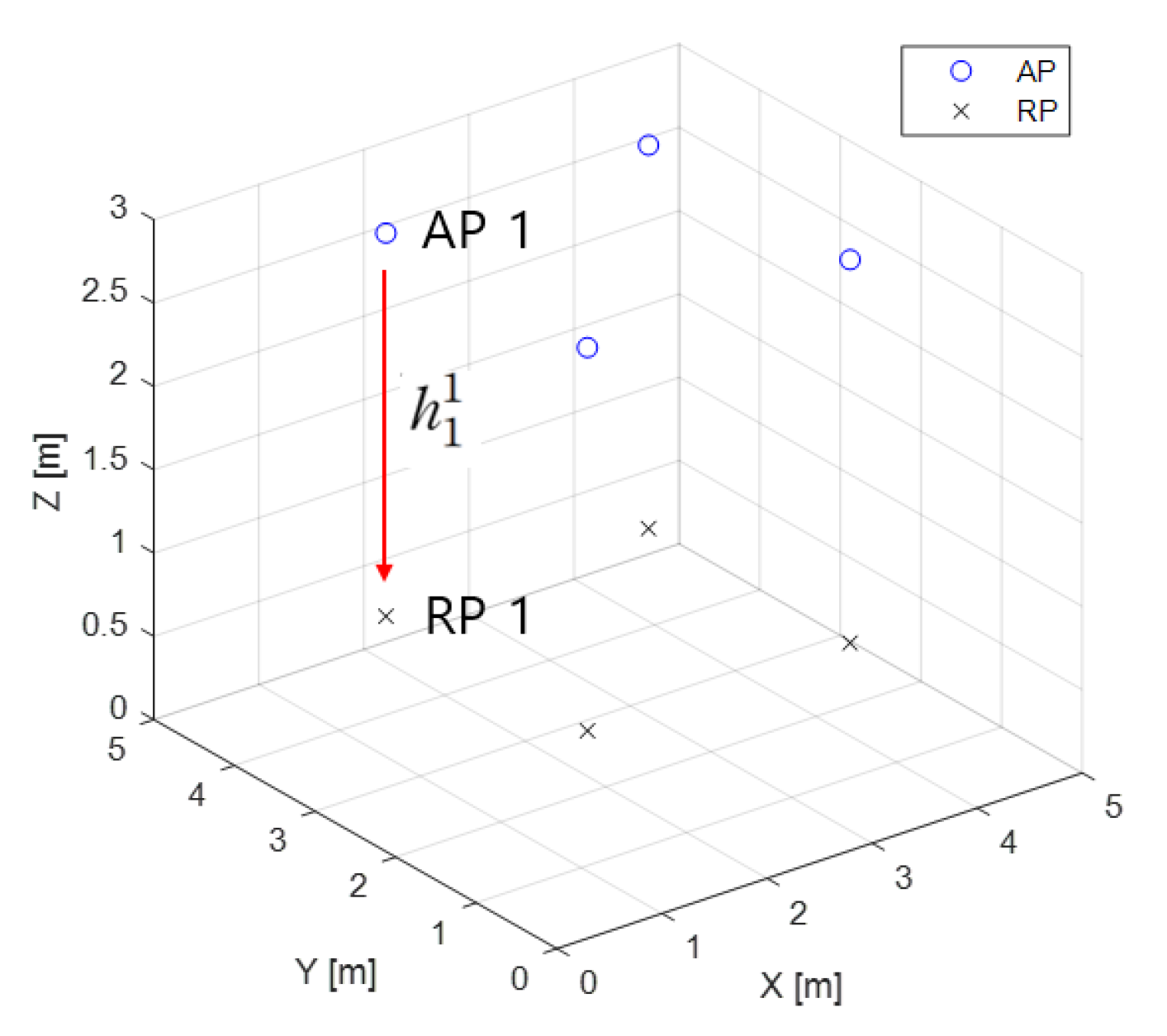
2.1. Indoor Environment Configuration
2.2. Optical Channel Analysis
3. Proposed Positioning Scheme
3.1. Fingerprinting Method
3.2. Weighted k-Nearest Neighbor (WkNN)
3.3. Deep Neural Network (DNN)
3.4. Parameter Determination
4. Simulation and Evaluations
4.1. Simulation Parameters
4.2. Simulation Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deng, Y.; Ai, H.; Deng, Z.; Gao, W.; Shang, J. An Overview of Indoor Positioning and Mapping Technology Standards. Standards 2022, 2, 157–183. [Google Scholar] [CrossRef]
- Kumari, A.; Bhatt, D. Advanced System Analysis and Survey on the GPS Receiver Front End. IEEE Access 2022, 10, 24611–24626. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P. RSSI-based indoor localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Basiri, A.; Lohan, E.S.; Moore, T.; Winstanley, A.; Peltola, P.; Hill, C.; Amirian, P.; Silva, P.F. Indoor location based services challenges, requirements and usability of current solutions. Comput. Sci. Rev. 2017, 24, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Chen, J.; Yuan, Y. A WiFi indoor localization strategy using particle swarm optimization based artificial neural networks. Int. J. Distrib. Sens. Netw. 2016, 12, 4583147. [Google Scholar] [CrossRef] [Green Version]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Applications. IEEE Int. Thin. J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Shang, S.; Wang, L. Overview of WiFi fingerprinting-based indoor positioning. IET Commun. 2022, 16, 725–733. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Feng, Y.; Zhang, X.; Sun, Y.; Lu, X. IWKNN: An effective Bluetooth positioning method based on Isomap and WKNN. Mob. Inf. Syst. 2016, 2016, 8765874. [Google Scholar] [CrossRef]
- Zhuang, Y.; Hua, L.; Qi, L.; Yang, J.; Cao, P.; Cao, Y.; Wu, Y.; Thompson, J.; Haas, H. A Survey of Positioning Systems Using Visible LED Lights. IEEE Commun. Surv. Tutor. 2018, 20, 1963–1988. [Google Scholar] [CrossRef]
- Lian, J.; Vatansever, Z.; Noshad, M.; Brandt-Pearce, M. Indoor visible light communications, networking, and applications. J. Phys. Photonics 2019, 1, 012001. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Chen, X. Visible Light Communication System Based on White LED. In Proceedings of the IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 27–29 June 2020. [Google Scholar] [CrossRef]
- Priya, C.B.; Sivakumar, S. A survey on localization techniques in wireless sensor networks. Int. J. Engi. Technol. 2018, 7, 125–129. [Google Scholar] [CrossRef] [Green Version]
- Ullah, I.; Chen, J.; Su, X.; Esposito, C.; Choi, C. Localization and Detection of Targets in Underwater Wireless Sensor Using Distance and Angle Based Algorithms. IEEE Access 2019, 7, 45693–45704. [Google Scholar] [CrossRef]
- Guo, X.; Shao, S.; Ansari, N. Khreishah, A. Indoor Localization Using Visible Light via Fusion of Multiple Classifiers. IEEE Photonics J. 2017, 9, 2767576. [Google Scholar] [CrossRef]
- Eroglu, Y.S.; Guvenc, I.; Pala, N.; Yuksel, M. AOA-based localization and tracking in multi-element VLC systems. In Proceedings of the IEEE 16th Annual Wireless and Microwave Technology Conference (WAMICON), Cocoa Beach, FL, USA, 13–15 April 2015. [Google Scholar] [CrossRef]
- Krishnaveni, B.V.; Reddy, K.S.; Reddy, P.R. An Introduction to the TOA measurement for UWB indoor localization Systems. In Proceedings of the 5th Conference on Information and Communication Technology (CICT), Kurnool, India, 10–12 December 2021. [Google Scholar] [CrossRef]
- Han, M.; Zeng, G. Research on indoor radio frequency positioning algorithm based on TDOA. In Proceedings of the International Seminar on Computer Science and Engineering Technology (SCSET), Indianapolis, IN, USA, 8–9 January 2022. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, H.; Song, J. Fingerprint and visible light communication based indoor positioning method. In Proceedings of the 9th International Conference on Advanced Infocomm Technology (ICAIT), Chengdu, China, 22–24 November 2017. [Google Scholar] [CrossRef]
- Van, M.T.; Tuan, N.V.; Son, T.T.; Le-Minh, H.; Burton, A. Weighted k-nearest neighbor model for indoor VLC positioning. IET Commun. 2017, 11, 864–871. [Google Scholar] [CrossRef]
- Mohammed, N.A.; Elkarim, M.A. Exploring the effect of diffuse reflection on indoor localization systems based on RSSI-VLC. Opt. Express 2015, 23, 20297–20313. [Google Scholar] [CrossRef] [PubMed]
- Gu, W.; Aminikashani, M.; Deng, P.; Kavehrad, M. Impact of Multipath Reflections on the Performance of Indoor Visible Light Positioning Systems. J. Light. Technol. 2016, 34, 2578–2587. [Google Scholar] [CrossRef] [Green Version]
- Gismalla, M.S.M.; Abdullah, M.F.L.; Ahmed, M.S.; Mabrouk, W.A.; Fadhali, N.A.; Saeid, E.; Supa’at, A.; Das, B. Design and Analysis of Different Optical Attocells Deployment Models for Indoor Visible Light Communication System. Int. J. Integ. Eng. 2021, 13, 253–264. [Google Scholar] [CrossRef]
- Tran, H.Q.; Ha, C. Fingerprint-Based Indoor Positioning System Using Visible Light Communication—A Novel Method for Multipath Reflections. Electronics 2019, 8, 63. [Google Scholar] [CrossRef] [Green Version]
- Yoo, J. Multiple Fingerprinting Localization by an Artificial Neural Network. Sensors 2022, 22, 7505. [Google Scholar] [CrossRef] [PubMed]
- Xia, S.; Liu, Y.; Yuan, G.; Zhu, M.; Wang, Z. Indoor Fingerprint Positioning Based on Wi-Fi: An Overview. Int. J. Geo-Inf. 2017, 6, 135. [Google Scholar] [CrossRef] [Green Version]
- Ge, X.; Qu, Z. Optimization WIFI indoor positioning KNN algorithm location-based fingerprint. In Proceeding of the 7th IEEE International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 26–28 August 2016. [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Name | Number of Nodes, Activation |
|---|---|
| Input Layer | 7 |
| Hidden Layer 1 | 210, ReLU |
| Drop out 1 | 0.4 |
| Hidden Layer 2 | 50, ReLU |
| Drop out 2 | 0.4 |
| Output Layer | 3, Sigmoid |
| Performance | Number of RPs | WkNN [20] | kNN [27] | Triangulation [21] |
|---|---|---|---|---|
| Processing time [s] | 4 | 0.00021 | 0.00019 | 0.00237 |
| 9 | 0.00033 | 0.00026 | ||
| 16 | 0.00048 | 0.00039 | ||
| Positioning error [m] | 4 | 1.687 | 1.711 | 1.298 |
| 9 | 1.324 | 1.351 | ||
| 16 | 0.812 | 0.846 |
| Number of Layers | Training/Test Loss | Training/Test Accuracy | Positioning Error [m] |
|---|---|---|---|
| 7-Layer | 0.234/0.0046 | 82.07/91.82 | 0.4104 |
| 6-Layer | 0.0049/0.00085 | 93.38/98.32 | 0.1746 |
| 5-Layer | 0.0023/0.00025 | 95.04/99.30 | 0.0913 |
| 4-Layer | 0.0021/0.00024 | 95.57/99.37 | 0.0898 |
| 3-Layer | 0.0011/0.0003 | 97.26/98.4 | 0.0942 |
| Learning Rate | Training/Test Loss | Training/Test Accuracy | Positioning Error [m] |
|---|---|---|---|
| 0.01 | 0.0021/0.00025 | 95.40/99.14 | 0.0933 |
| 0.005 | 0.0021/0.00024 | 95.57/99.37 | 0.0898 |
| 0.001 | 0.0021/0.00026 | 95.54/98.65 | 0.0961 |
| Parameter | Value | |
|---|---|---|
| Environment | Room size | 5 m × 5 m × 3 m |
| Number of APs | 4 | |
| Number of RPs | 16 | |
| Reflection coefficient | 0.8 | |
| Transmitters | Transmit power | 10 W |
| Half power semi-angle | 60° | |
| Wavelength | 420 nm | |
| Elevation | −90° | |
| Receiver | Active area of UE | |
| Field of view (FOV) | 60° | |
| Optical filter gain | 1 | |
| Optical concentrator gain | 1.5 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, S.-H.; Kim, J.-G. AI-Based Positioning with Input Parameter Optimization in Indoor VLC Environments. Sensors 2022, 22, 8125. https://doi.org/10.3390/s22218125
Oh S-H, Kim J-G. AI-Based Positioning with Input Parameter Optimization in Indoor VLC Environments. Sensors. 2022; 22(21):8125. https://doi.org/10.3390/s22218125
Chicago/Turabian StyleOh, Sung-Hyun, and Jeong-Gon Kim. 2022. "AI-Based Positioning with Input Parameter Optimization in Indoor VLC Environments" Sensors 22, no. 21: 8125. https://doi.org/10.3390/s22218125
APA StyleOh, S. -H., & Kim, J. -G. (2022). AI-Based Positioning with Input Parameter Optimization in Indoor VLC Environments. Sensors, 22(21), 8125. https://doi.org/10.3390/s22218125