1. Introduction
Reliable underwater acoustic communications (UWAC) provide convenient support for untethered submerged platforms for ranges beyond, say, 100 m [
1]. Fixed or mobile submerged platforms need to communicate either to other submerged platforms or to a surface station. Mobile platforms, e.g., autonomous underwater vehicles (AUVs) and gliders, are particularly challenging for UWAC because acoustic communication channels are continuously varying due to changing spatial characteristics of the propagation media [
2]. For those mobile assets, long-range communication allows guidance, status updates, and the sharing of on-the-fly sensor information [
1,
3]. Mobile platforms are also restricted in size, weight, and energy consumption, which explains why not many of those employ acoustic communications on board and, when they do, these are based on very simple low-power single transducer modems [
4]. Typically, such acoustic transducers have an omnidirectional or a fixed directional pattern, from which this study differs, by using higher-order sensors, known as acoustic vector sensors.
Acoustic vector sensors are devices that separately measure pressure and directional components [
5]. Vector sensors have been widely used for sonar applications to mitigate left-right ambiguity of line arrays and provide a directional gain even for low-frequency signals (under 300 Hz) [
6]. It is notorious and expected that most of the literature on vector sensors addresses the direction-finding issues since a compact collocated device can improve the gain of an ordinary pressure sensor or enhance the gain of a pressure array [
7,
8,
9,
10]. Much work has been carried out regarding direction of arrival (DoA) estimation using vector sensors, either by additive or multiplicative channel combining methods [
7,
11,
12,
13], exploiting signal and noise subspace domains [
14], higher-order array manifold [
15], or artificial intelligence [
16]. Although researchers have deeply investigated DoA methods, the use of this information for UWAC is still little explored.
For UWAC, vector sensors are relatively new, and their components are used as a single-input multiple-output system, acting itself as an equalizer [
17]. Usually, the components are considered independent channels, and a matched-filter combining is used and implemented as versions of multichannel equalizers [
17,
18] or passive-time reversal (PTR) [
19,
20]. In such approaches, the advantage of the vector sensor over the pressure sensor is explained by its intrinsic directionality, both by improving signal-to-noise ratio (SNR) when the horizontal component is used, and by exploring channel diversity, which, in theory, could be provided by the vertical component in far-field scenarios.
Besides matched-filter methods, an investigation of beamforming for communication has shown that the provided SNR gain of a two-axis vector sensor may reduce bit error rate (BER) [
21]. However, data analysis is reduced, and the presented result is limited to one fixed source-receiver range and direction. A recent study compared a beamforming approach using three-axis vector sensors to an adapted receiver structure that joins beam steering and passive-time reversal methods [
22]. Although the results show the benefits of the proposed receiver structure by reducing the bit error and increasing robustness along range, the steerability is not deeply investigated since more transmission directions in different geographic quadrants are necessary for a complete and secure analysis.
Thus, this work intends to show, experimentally, the steerability impact of vector sensors on communications using a recent dataset of a shallow-water field experiment. Conducted under the European Multidisciplinary Seafloor Observatory Portugal (EMSO-PT) project in November 2021, this experiment (EMSO’21) allows us to test a point-to-point communication link between a surface platform and a bottom receiver. The receiver is a single two-axis vector sensor whose outputs were acquired by a newly designed recorder. During EMSO’21, the vector sensor was fixed to a tripod on the seafloor, and an acoustic source was suspended from a ship transmitting coded sequences at various ranges and from several directions around the vector sensor. One can notice that such geometry can be similar to an AUV operating close to the bottom with an onboard vector sensor and a surface transmitting station. The communication performance was quantified and compared using vector sensor individual components, a vector sensor beam steering (vs-bs), passive time-reversal (vs-ptr), and the joint beam steering and passive time-reversal (vs-bsptr) methods. Moreover, this work addresses the necessity of a preprocessing stage for particle velocity estimation when using a pressure-gradient vector sensor. Such a relevant analysis is complemented by the impact of DoA fluctuation in the BER and how directional ambiguities may influence communication performance. This study shows a clear relationship between communication performance, range, and source direction. The steerability of vector sensors is shown as an advantage, where the combining approaches constantly outperform the omnidirectional pressure sensor.
This paper is organized as follows: analytical expression of pressure-gradient vector sensors and the tested receiver structures are shown in
Section 2; the EMSO’21 experiment is described in
Section 3; the experiment’s results are presented in
Section 4;
Section 5 presents analysis and discussion; and finally,
Section 6 presents the conclusion.
3. EMSO’21 Experiment
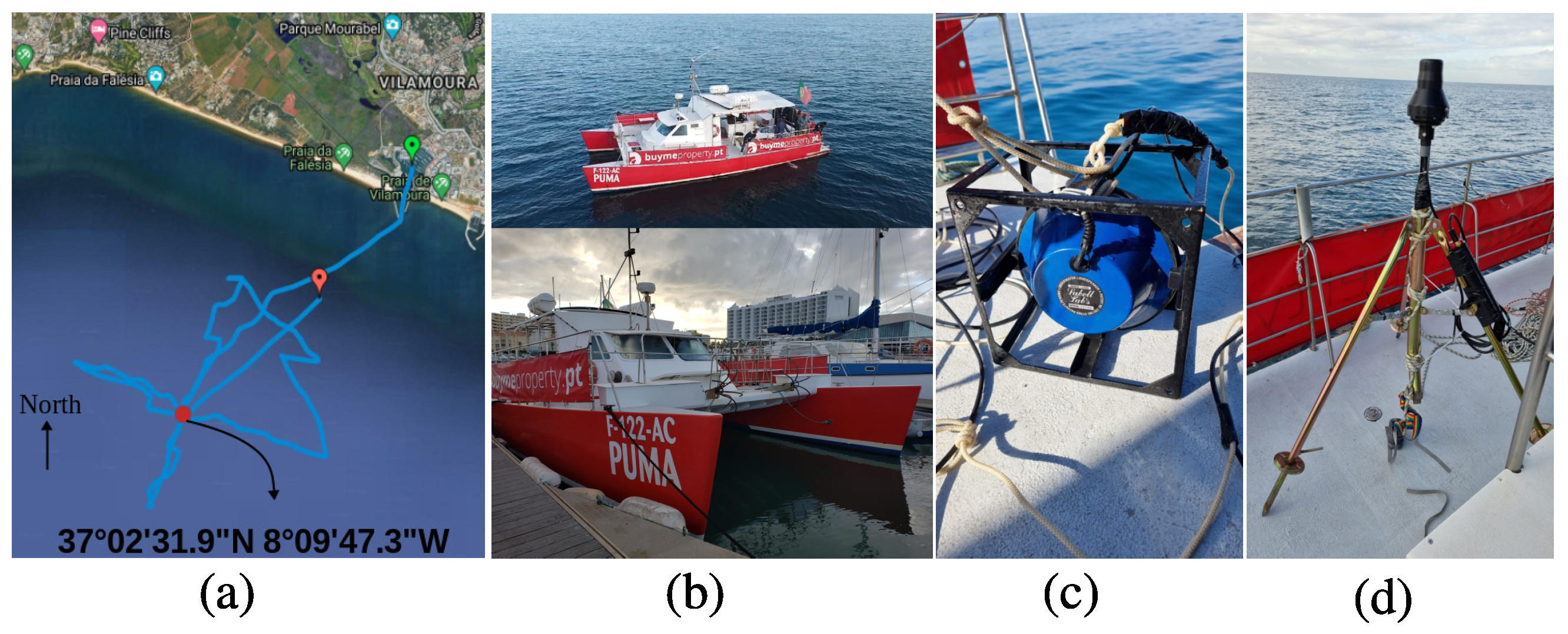
The EMSO’21 experiment took place off Vilamoura port, on the south coast of Portugal, on 24 November 2021. In this experiment, a point-to-point communication test was performed, where the receiver was a single vector sensor placed on the bottom, and the sound source was tied to a ship.
Figure 1a shows the satellite view of the experiment area, highlighting the ship sailing route and the vector sensor positioning (red dot). The ship used in the test is shown in
Figure 1b, which left the Vilamoura harbor at 9h00 (local) and went approximately 6 km in the southwest direction, where the vector sensor was deployed.
Figure 1c shows the Lubell-916C sound source, which transmitted signals in the band from 3 to 13 kHz, where the transmit voltage response is approximately 154 dB/μPa/V (5 kHz) and 160 dB/μPa/V (10 kHz). The vector sensor was attached to the top of a tripod, and an autonomous recorder at one of the tripod’s legs, as shown in
Figure 1d. A 10 kg weight was fixed at the tripod’s center bar in order to guarantee a deployment as vertical as possible and prevent roll-over due to sea currents.
The vector sensor is the two-axis pressure-gradient GeoSpectrum model M35, designed to operate from 100 Hz to 15 kHz, and which measures pressure and two orthogonal directional components (x-y components) [
27]. The directional components’ axis references are considered true references, where the x-component is toward north and the y-component toward east. This axis compensation is performed by a clockwise rotation matrix using the north magnetic angle from an internal orientation sensor. The autonomous acquisition system was used to synchronously record the three vector sensor components (pressure, x, and y) at the sampling frequency of 39,062 Hz with a 24-bit of dynamic range.
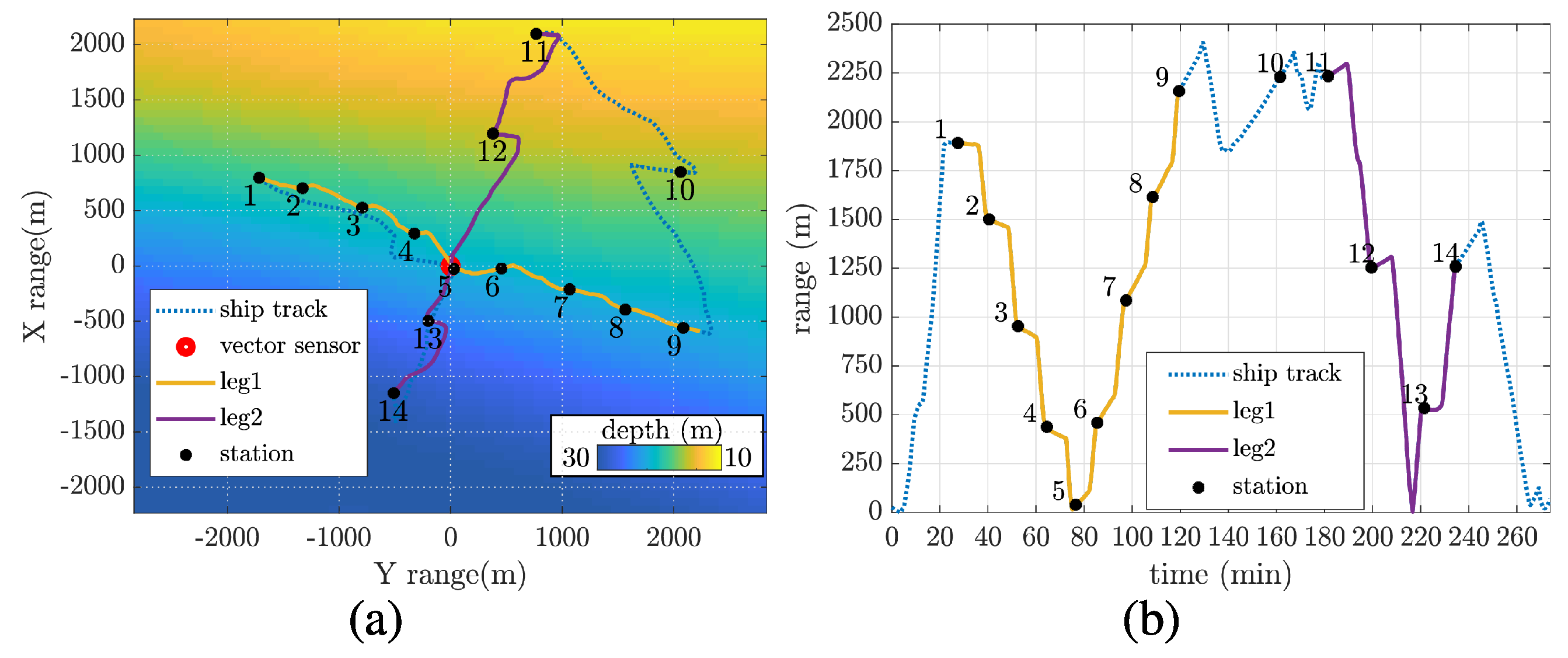
Figure 2a shows the bathymetry in an X-Y range Cartesian plot with the vector sensor/tripod assembling position displayed at the origin (lat-lon 37.04235° N, −8.16359° W). The vector sensor was placed at approximately 2 m from the bottom, where the local water depth is 20 m. From the vector sensor deployment position, the ship goes along two tracks: leg1, which is an approximately 20 m depth isobathymetric transmission path, and leg2, which represents a downslope path. Notice that the figure’s axes were established according to the M35 reference (x is toward north and the y toward east, with azimuth angle
clockwise). The planned transmission stations (black dots) 1, 2, up to 14, are considered fixed stations even if small displacements were noticed due to the ship drift. In
Figure 2b, the ship-to-vector sensor range along time is shown, where the leg1, leg2, and the transmission stations are also highlighted. The communication signals transmitted at those stations were generated by the sound source suspended at approximately 7 m depth from a surface buoy tied at 3 m from the ship’s stern. This work analyzes a binary phase-shift keying (BPSK) communication signal at 2 kbits/s data rate and a carrier frequency of 5 kHz (effective 3 kHz bandwidth). Fifty packets of one second were transmitted, where each packet was a random series composed of 2000 symbols. A 255 symbol m-sequence preamble was used for synchronization and Doppler compensation. The signal was filtered by a root-raised-cosine pulse shape with a roll-off factor of 0.5.
4. Results
The outputs of the vector sensor model M35 are pressure-difference
as shown in Equation (
3), and the pressure-equivalent particle velocity components (
and
) are estimated using Equation (
4) with
m/s and
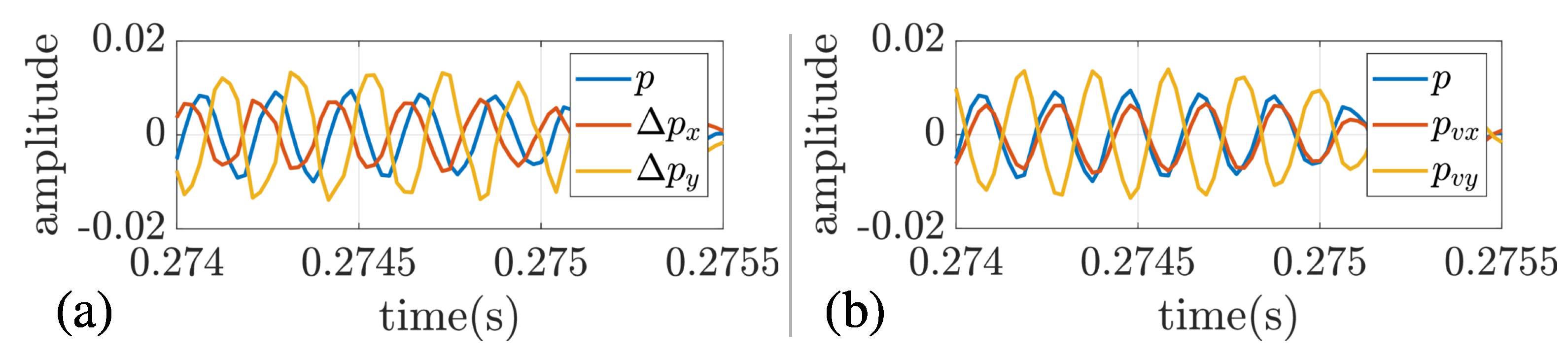
m. A first check of the directional components (
or
) can be made by analyzing their phase, referenced to the omnidirectional hydrophone. An example can be seen in
Figure 3, where the time series for pressure and the directional channels are shown for station 3. For
, a lead signal referenced to pressure represents north (for x-component) or east (for y-component), whereas a lag signal referenced to pressure represents south (for x-component) or west (for y-component). In
Figure 3a,
is lead, which represents north, whereas
is lag, representing west. Thus, it is clear that the source direction comes from the northwest quadrant. For
, if pressure and particle velocity are in-phase, it represents a signal from the northeast quadrant and vice-versa. In
Figure 3b, pressure and the estimated particle velocity
are in-phase, whereas pressure and
are in counter-phase. Thus, it represents a signal from the northwest quadrant as
.
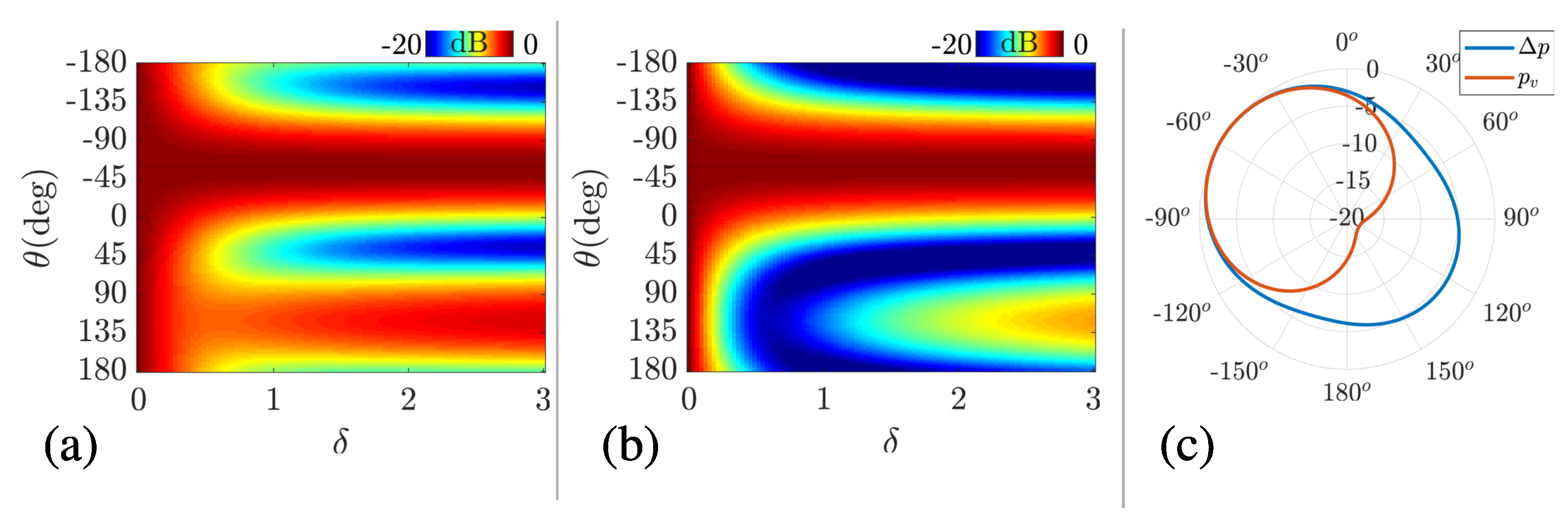
The impact of the vector sensor channel combining communications can be associated with the spatial filtering capability, analyzed here by energy detection. The beam response for station 3 was analyzed by varying the
factor, where it is known that the source is at approximately −60°. In
Figure 4a,
is used, and the main lobe is noticed in the source direction, although ambiguity is verified as
increases. In
Figure 4b, the ambiguity is mitigated, and the maximum ratio between the main lobe and the sidelobe is found for
.
Figure 4c shows the beam response with
for both
and
, where the ambiguity mitigation is apparent, and the cardioid-like shaped response is obtained. Thus, one can conclude that the proper
value is 0.5 for a backside ambiguity mitigation, which is set for quantifying the communication performance.
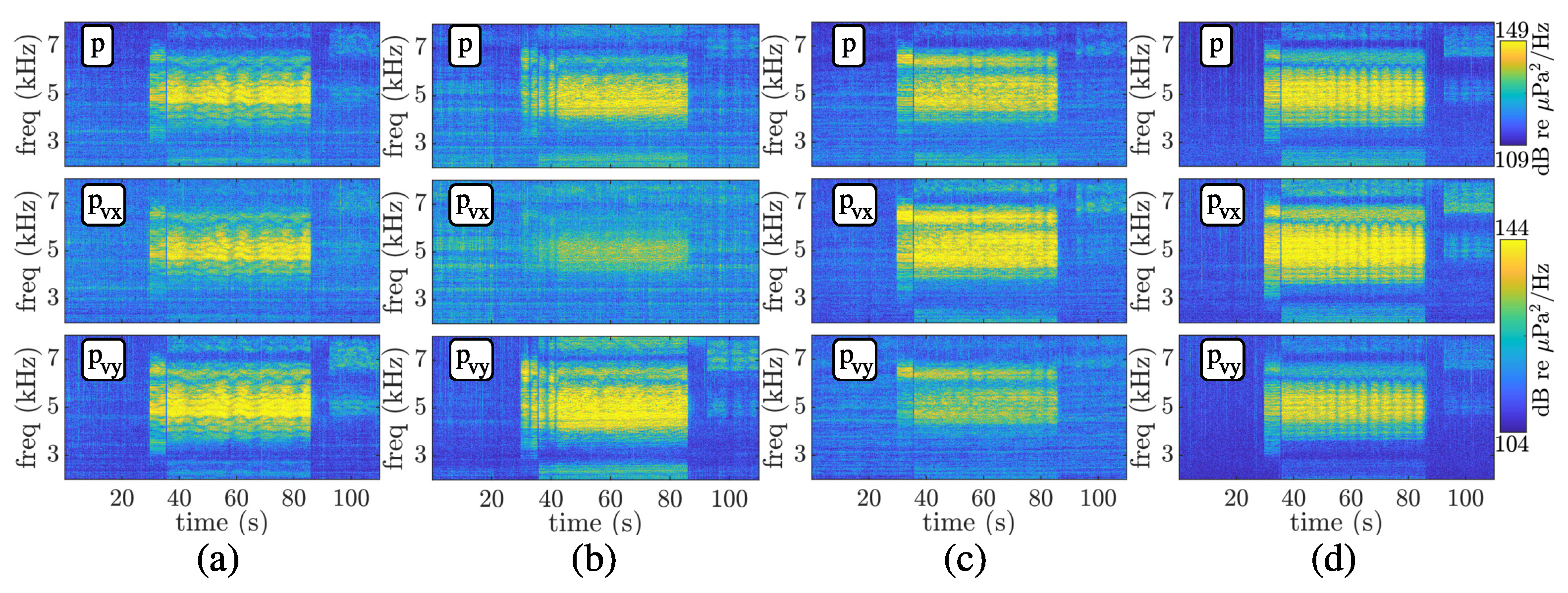
Spectrograms of the received communication signals for the pressure (
p) and pressure-equivalent particle velocity (
and
) for stations 3 (a), 7 (b), 12 (c), and 14 (d) are shown in
Figure 5. The spectrograms show the BPSK communication signals that also contain a sequence of linear frequency modulation (chirp) as a probe for future use in automatic detection algorithms, not treated here. The same normalization was used in the spectrograms with the objective of showing attenuated/amplified components. One can relate the power spectrum amplitude of the components with the transmitting stations. For instance, in
Figure 5b,
is highly attenuated since the sound source is transmitting at approximately 100°, whereas in
Figure 5c,
is the attenuated component since the sound source is emitting from north (20°).
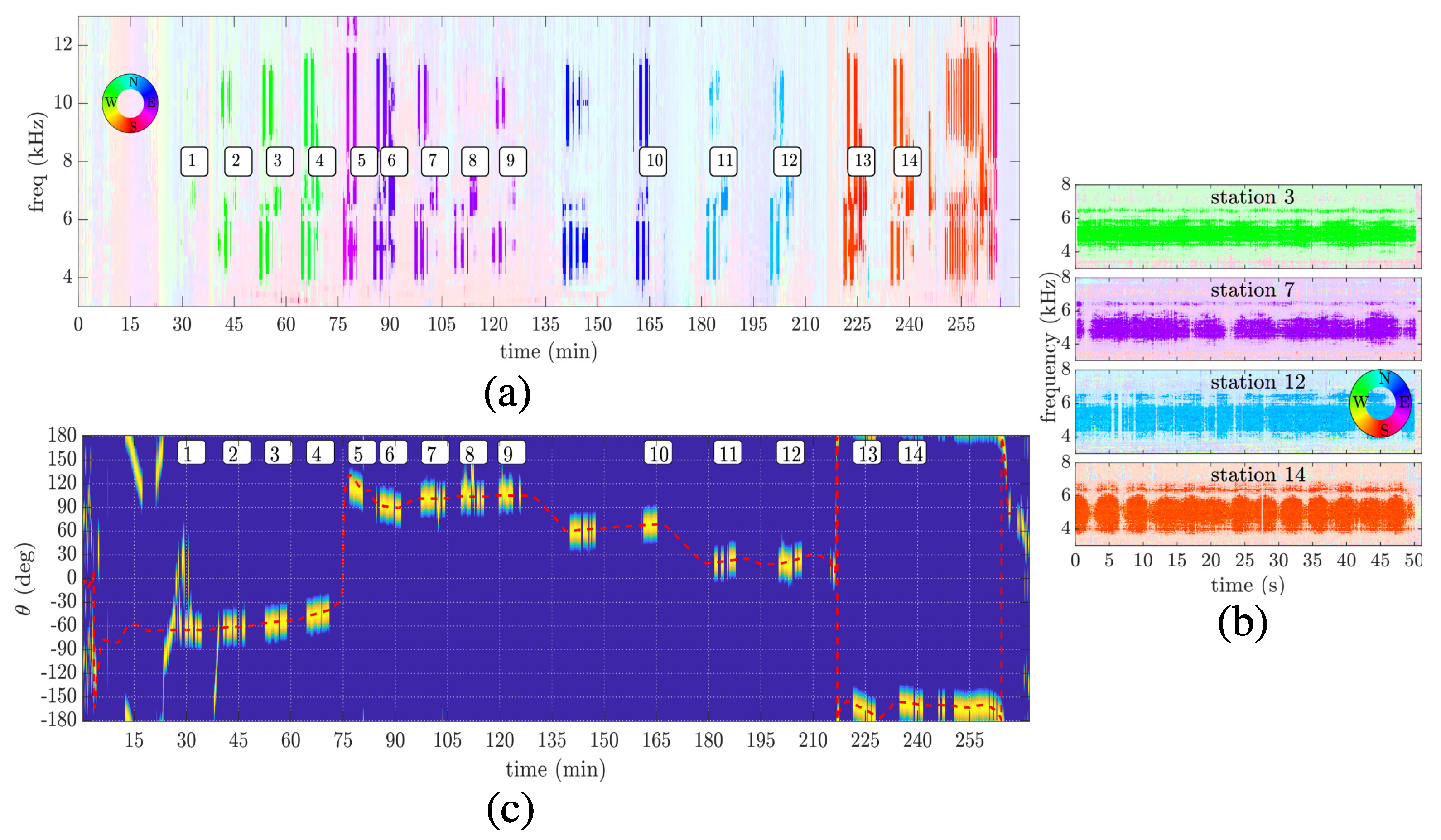
Figure 6 shows the azigram of recorded data during the overall communication test (a), during stations 3, 7, 12, and 14, from top to bottom (b), and the overall energy detection (c). An azigram is a condensed way to show the directional information over frequency and time. In fact, an azigram is analogous to a spectrogram, although the latter shows the power spectral density instead of the source direction estimation as a colormap. Interested readers can find a full study on azigrams in [
28] and references therein. Here, the azigram was used as an analysis tool to check for transmitting directions and ambiguity issues.
Figure 6a,b were obtained using the Bartlett estimator, where Equation (
8) was used with a frequency step of 50 Hz,
Hz, and an integration time of 0.34 s (a) and 0.08 s (b). Alpha transparency was used for clear visualization, considering the intensity of Equation (
7). For comparison purposes, the broadband energy detection using the Bartlett estimator is shown in
Figure 6c, where the estimated azimuth angle using GPS info is shown in the dashed red line. An empirical threshold of 80% is used to visualize transmission intervals better, although some fishing vessels are also detected up to minute 45. Moreover, it is possible to assimilate the transmitting stations with the source direction and frequency by comparing
Figure 6c with the estimated directions in
Figure 6a. Note that other communication signals were transmitted in different bands and modulations, not treated here. In
Figure 6b, besides the directional information, a fading effect is observed within the fifty seconds of transmission. However, this figure clearly shows no directional ambiguity over the communication bandwidth. This fact is important since the azimuth angle, used for beam steering, is estimated using the full bandwidth, and this estimation could be impacted when some frequency presents ambiguity.
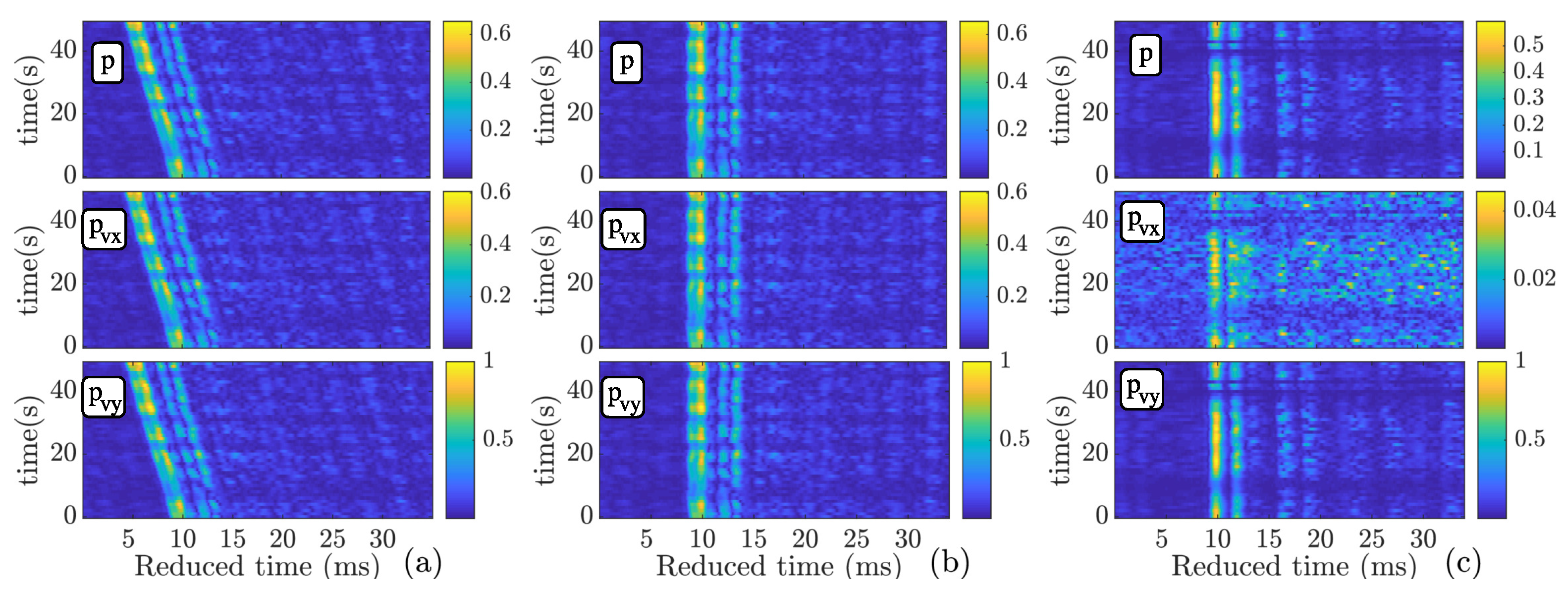
Figure 7 shows the CIR of the vector sensor components for stations 3 and 6 for pressure (top),
(middle), and
(bottom) in a normalized scale. The CIR estimation is based on a correlation estimator, where the m-sequence was used as a replica. An alignment due to the Doppler was performed using the synchronization sample. In
Figure 7a, the CIR of station 3 is not aligned, and the Doppler effect due to ship drift is noticed. Since the ship is moving toward the vector sensor (see
Figure 2b), time compression is observed.
Figure 7b shows the CIR of station 3, where the alignment is performed using the synchronization sample. In
Figure 7c, the aligned CIR of station 6 is shown, where one can notice the amplitude difference between the components. The CIR of station 6 demonstrates the attenuation of
, where the performance of methods that use such a noisy channel may be degraded.
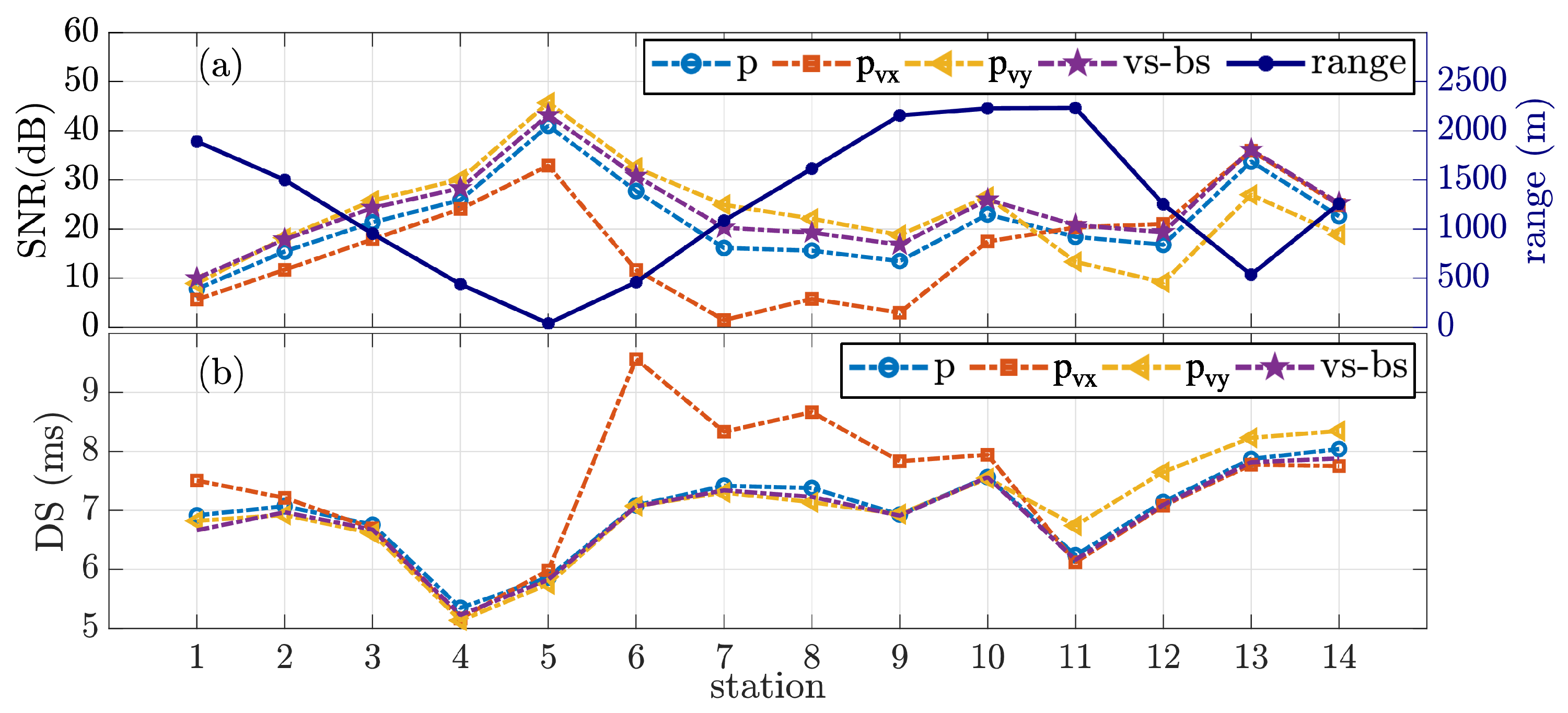
Figure 8a shows the estimated input SNR for pressure (
p), directional components (
and
), and vector sensor beam steering (vs-bs). The SNR for vs-bs was estimated using the steered output. The SNR for the passive time-reversal outputs is not shown since the combining gain is achieved after the equalizer. The SNR estimation was performed in the band from 4 to 6 kHz, and it uses a 50 s interval of the received signal and ambient noise starting 1 min before the received signal. For convenience, the vertical right-hand side dark-blue color axis shows the vector sensor to source range. The RMS delay spread (DS) is shown in
Figure 8b, which characterizes the “severity” of the CIR, where a more extended time spread may represent a more severe channel [
19]. The DS was calculated using the time-invariant CIR (power-delay profile [
29]), where a −20 dB threshold was used. The DS for the passive time-reversal output is not shown since the resulting CIR was achieved after the equalization stage.
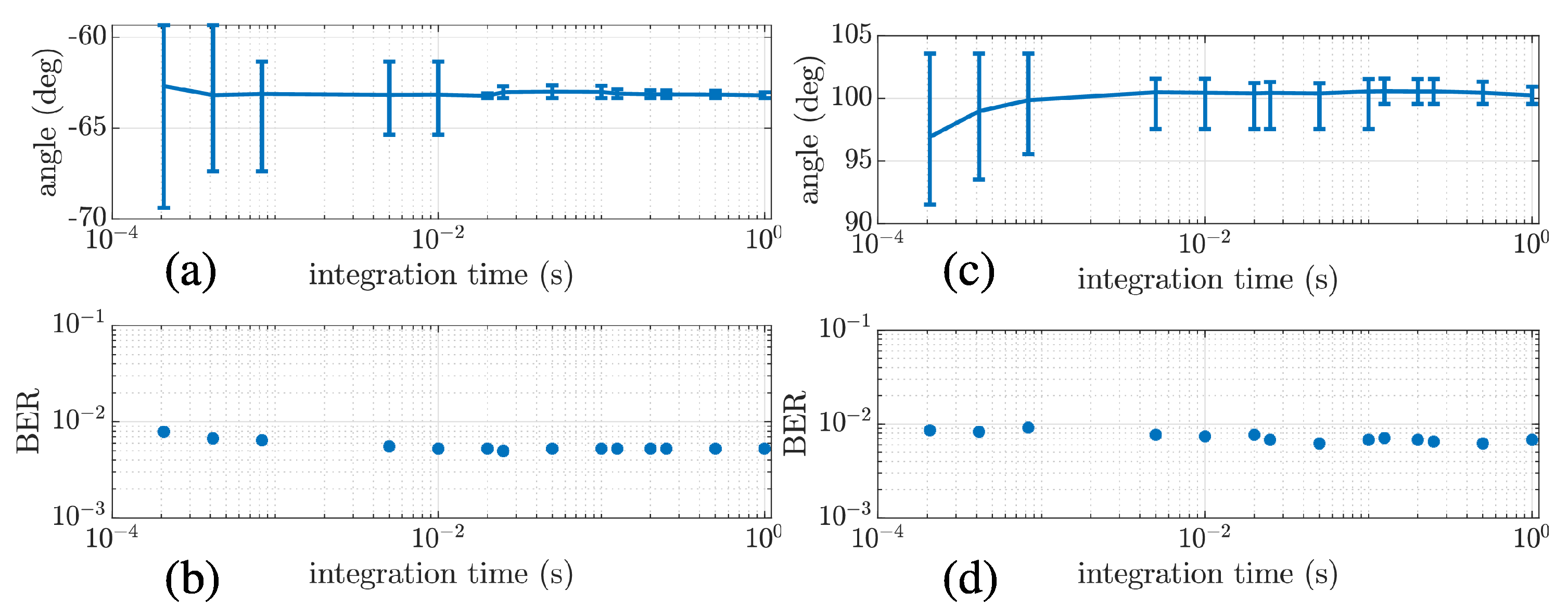
A relevant aspect to consider is the impact of angle fluctuation on the BER performance of vs-bs, which can be investigated using
Figure 9. This figure shows the estimated angle and the BER according to the integration time for stations 2 (a,b) and 7 (c,d), respectively. One can note that the azimuth angle may fluctuate depending on the integration time used to estimate the correlation matrix. Discrete integration time values were used from 0.2 ms to 1 s, where 1 s is a full data packet interval. In
Figure 9a,c, the error bar represents the mean value and the percentiles of the 50 packets. As expected, the fluctuation is higher as the integration time reduces. However, no relevant difference in the BER was noticed for the tested integration time, even for more than 10° of fluctuation. Thus, there is no advantage of using such a small integration time value since the error does not reduce. Furthermore, it is not practical to process in such a small interval (i.e., updating the DoA estimation), which motivates the use of a full data packet in this study.
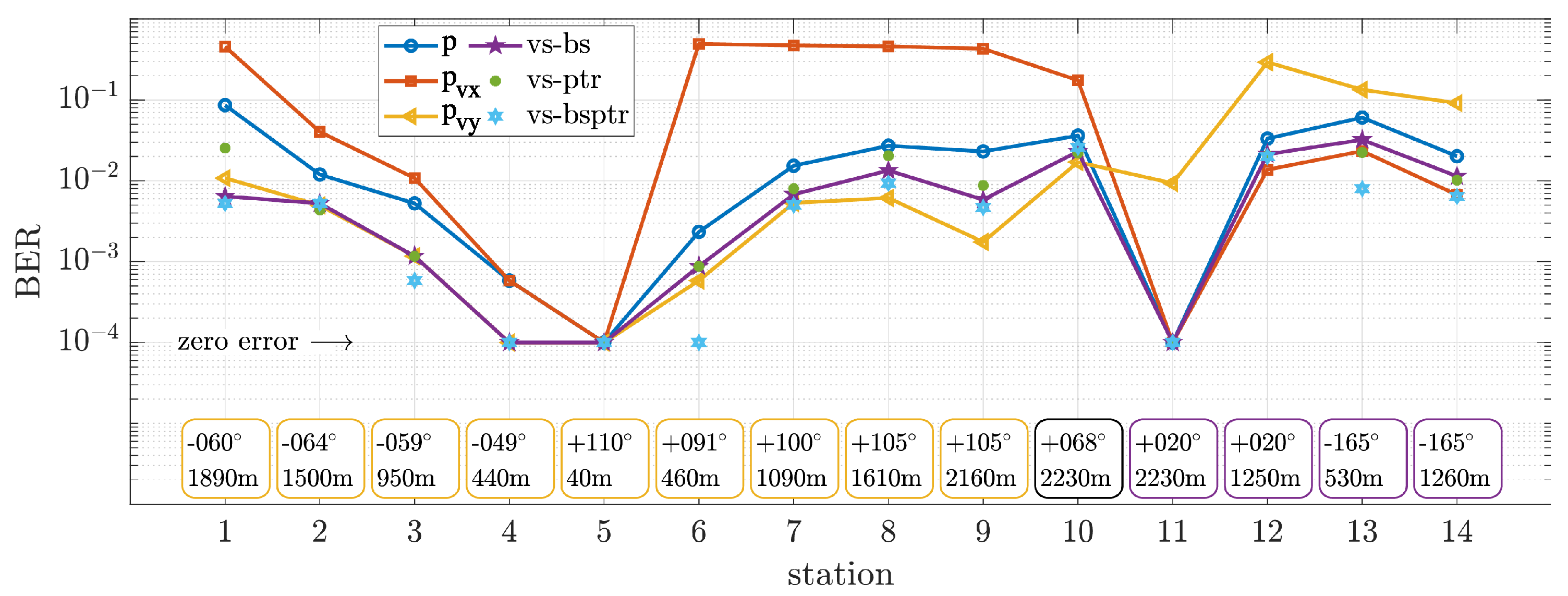
Figure 10 shows the BER performance for each station. The DFE uses 34 feed-forward and 20 feedback taps for adaptive fractionally spaced equalization with oversampling factor 2. The RLS forgetting factor is set empirically to 0.997. Moreover, the integral and proportional PLL coefficients are 0.01 and 0.0001, respectively. The fifty packets were treated as independent, and the BER was estimated as a median value. In
Figure 10, the performance is quantified for vs-bs, vs-ptr, and vs-bsptr. For comparison purposes, the performance for
p,
, and
is also shown, separately. Note that bottom boxes show the source direction and range, highlighting leg1 and leg2 routes. Moreover, a zero error indicator shows the lower bound to account for errors that cannot be estimated with the limited number of samples available.
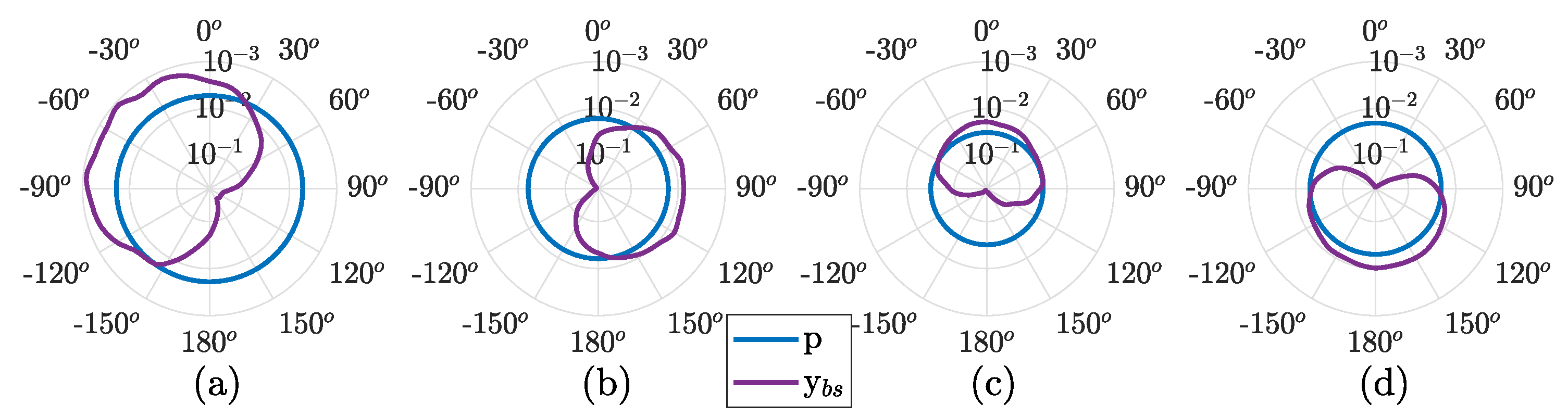
Figure 11 shows BER in polar plots using Equation (
6) for discrete angles
in
. Performance of the pressure sensor (
p) is shown for reference. From (a) to (d), the BER performance is shown for stations 3, 7, 12, and 14, respectively. These transmitting stations were chosen for analysis since they are in different geographic quadrants, where steerability can be verified. Note that the polar graphs have a logarithm inverted axis, where the highest BER value (0.5) is at the center. The BER and beam pattern similarity can be observed using the axis in this format.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










