
Classification of Holograms with 3D-CNN

Abstract
:1. Introduction
- We debate that a CNN is optimal for utilizing all information present in a hologram and support this presumption with the results.
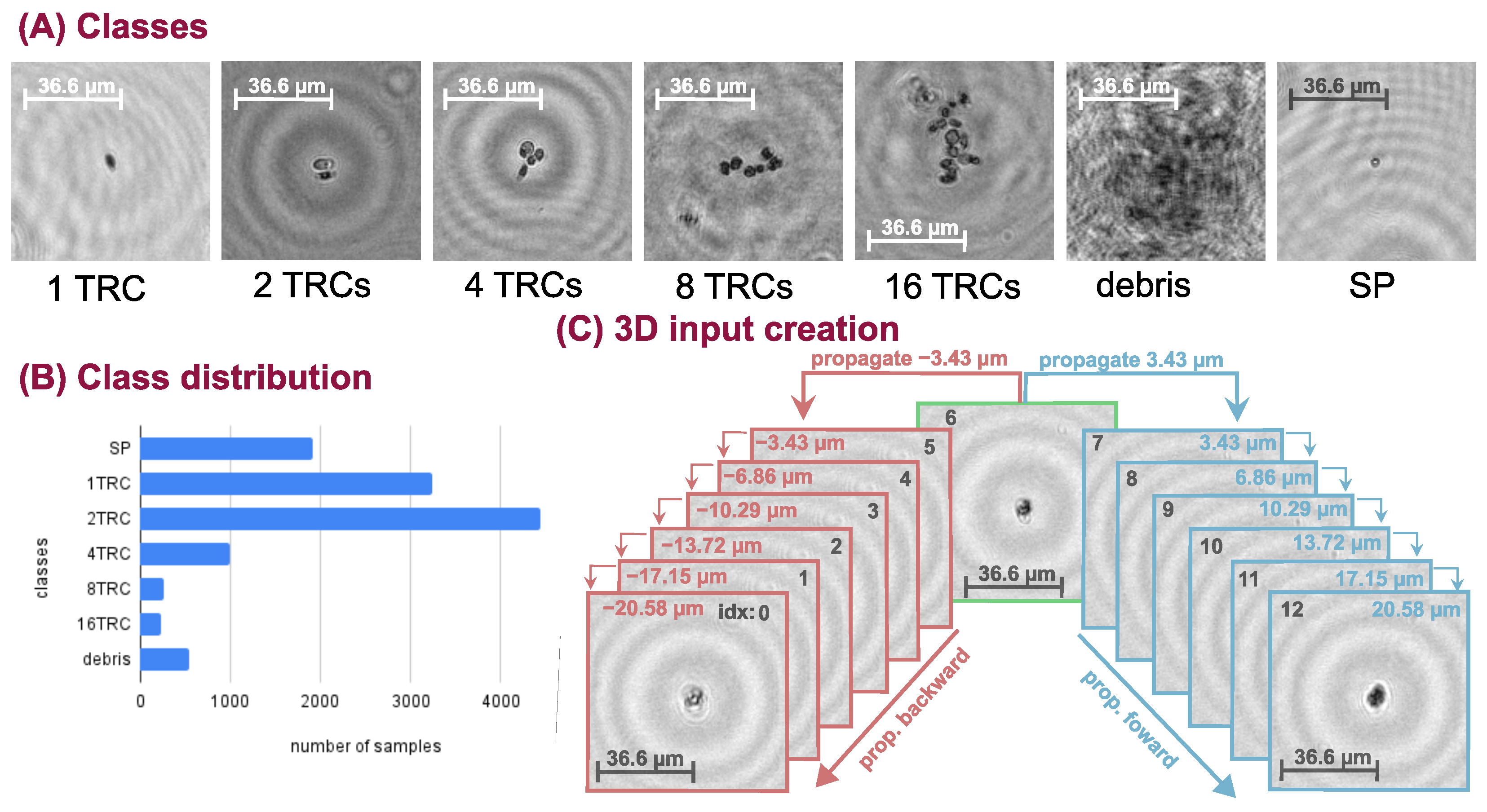
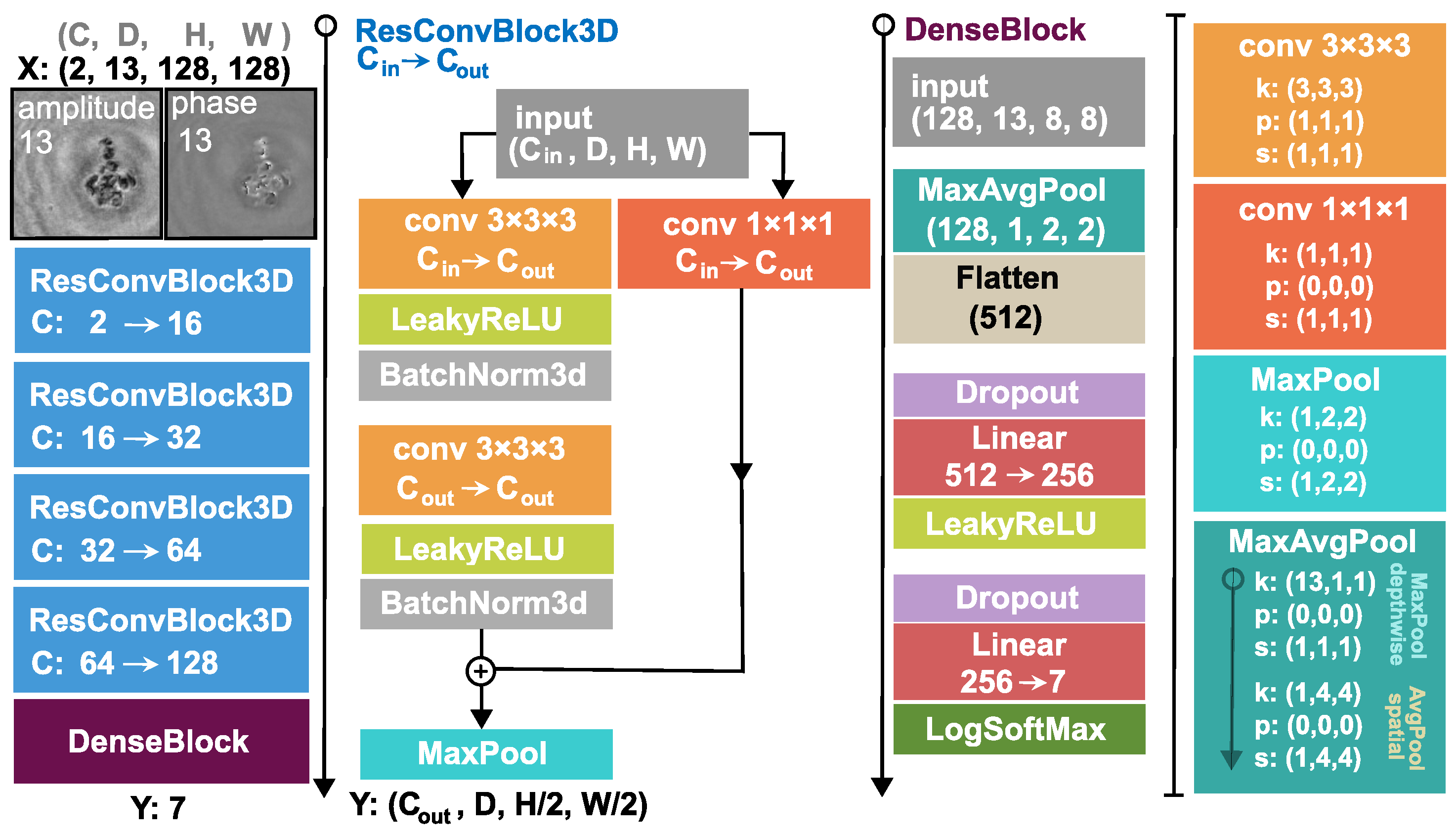
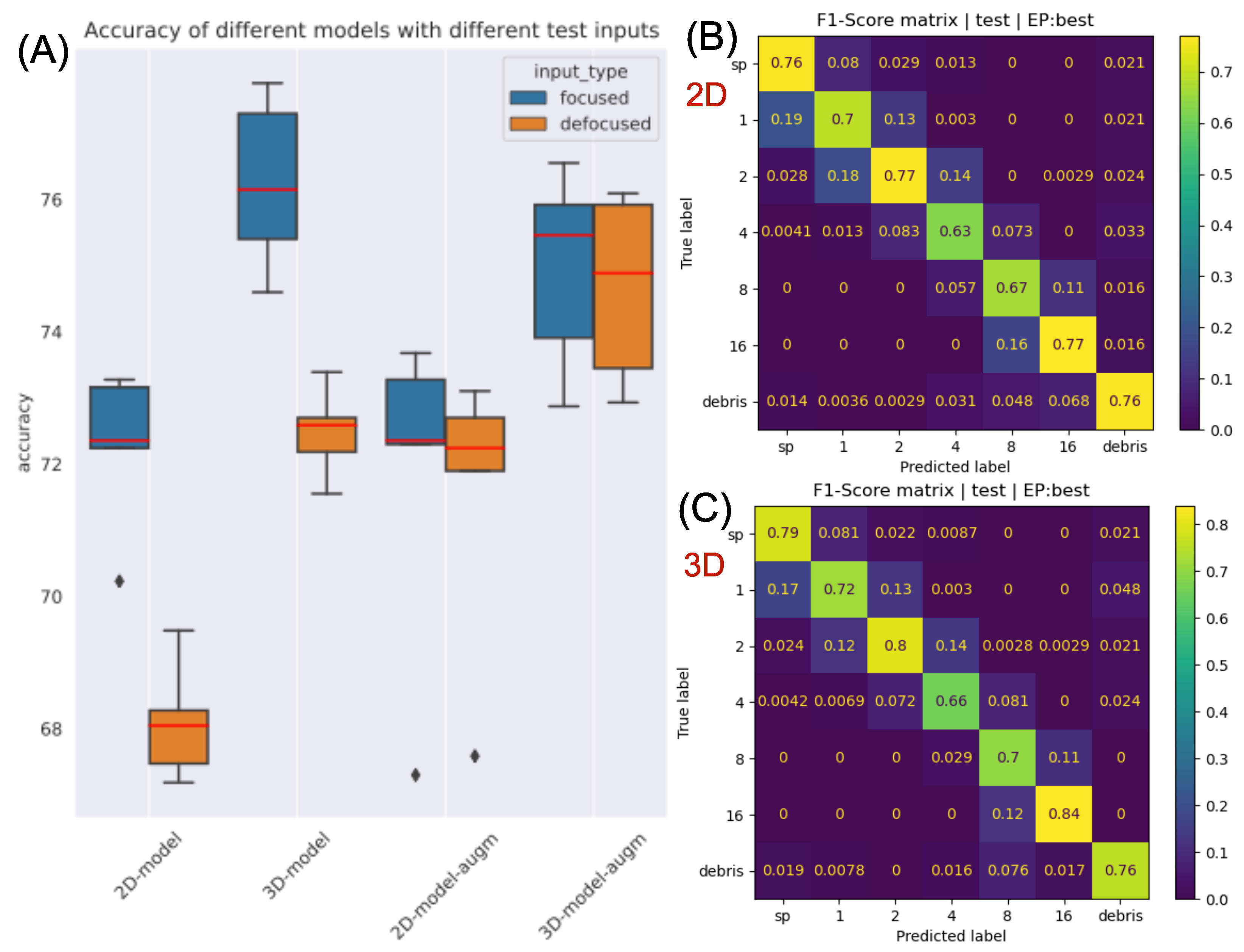
- We show that extracting the depth information by reconstructing a volume and feeding it to a 3D-CNN-based architecture improves the classification accuracy compared to the 2D-CNN baseline which operates on a single reconstructed hologram.
- We show that our 3D-model is inherently more robust to slightly defocused samples.
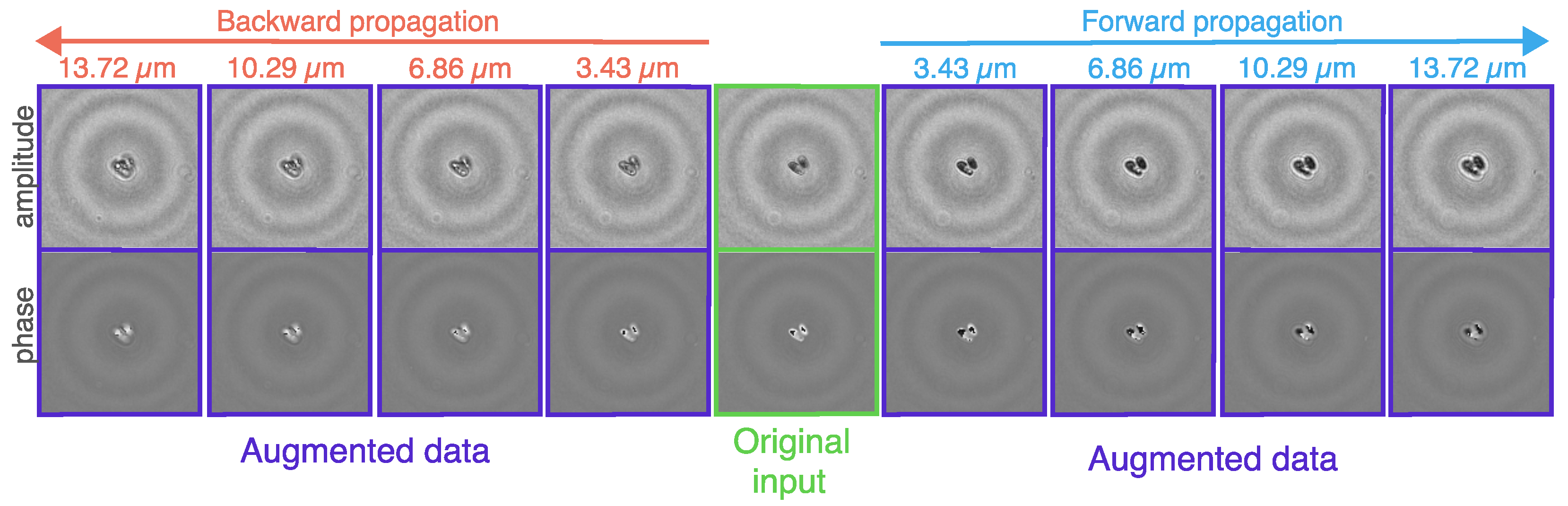
- Finally, we propose a novel hologram augmentation technique—called hologram defocus augmentation—that improves the defocus tolerance of both methods.
2. Materials and Methods
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Goy, A.; Arthur, K.; Li, S.; Barbastathis, G. Low photon count phase retrieval using deep learning. Phys. Rev. Lett. 2018, 121, 243902. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rivenson, Y.; Zhang, Y.; Günaydın, H.; Teng, D.; Ozcan, A. Phase recovery and holographic image reconstruction using deep learning in neural networks. Light Sci. Appl. 2018, 7, 17141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sinha, A.; Lee, J.; Li, S.; Barbastathis, G. Lensless computational imaging through deep learning. Optica 2017, 4, 1117–1125. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Rivenson, Y.; Zhang, Y.; Wei, Z.; Günaydin, H.; Lin, X.; Ozcan, A. Extended depth-of-field in holographic imaging using deep-learning-based autofocusing and phase recovery. Optica 2018, 5, 704–710. [Google Scholar] [CrossRef] [Green Version]
- Nishizaki, Y.; Horisaki, R.; Kitaguchi, K.; Saito, M.; Tanida, J. Analysis of non-iterative phase retrieval based on machine learning. Opt. Rev. 2020, 27, 136–141. [Google Scholar] [CrossRef] [Green Version]
- Dardikman, G.; Shaked, N.T. Phase unwrapping using residual neural networks. In Proceedings of the Computational Optical Sensing and Imaging. Optical Society of America, Orlando, FL, USA, 25–28 June 2018; p. CW3B-5. [Google Scholar]
- Spoorthi, G.; Gorthi, S.; Gorthi, R.K.S.S. PhaseNet: A deep convolutional neural network for two-dimensional phase unwrapping. IEEE Signal Process. Lett. 2018, 26, 54–58. [Google Scholar] [CrossRef]
- Wu, Y.; Ray, A.; Wei, Q.; Feizi, A.; Tong, X.; Chen, E.; Luo, Y.; Ozcan, A. Deep learning enables high-throughput analysis of particle-aggregation-based biosensors imaged using holography. ACS Photonics 2018, 6, 294–301. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Calis, A.; Luo, Y.; Chen, C.; Lutton, M.; Rivenson, Y.; Lin, X.; Koydemir, H.C.; Zhang, Y.; Wang, H.; et al. Label-free bioaerosol sensing using mobile microscopy and deep learning. ACS Photonics 2018, 5, 4617–4627. [Google Scholar] [CrossRef]
- Göröcs, Z.; Tamamitsu, M.; Bianco, V.; Wolf, P.; Roy, S.; Shindo, K.; Yanny, K.; Wu, Y.; Koydemir, H.C.; Rivenson, Y.; et al. A deep learning-enabled portable imaging flow cytometer for cost-effective, high-throughput, and label-free analysis of natural water samples. Light Sci. Appl. 2018, 7, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; De Haan, K.; Rivenson, Y.; Wei, Z.; Zeng, X.; Zhang, Y.; Ozcan, A. Deep learning-based super-resolution in coherent imaging systems. Sci. Rep. 2019, 9, 3926. [Google Scholar]
- Shimobaba, T.; Kakue, T.; Ito, T. Convolutional neural network-based regression for depth prediction in digital holography. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, Australia, 13–15 June 2018; pp. 1323–1326. [Google Scholar]
- Wu, Y.; Luo, Y.; Chaudhari, G.; Rivenson, Y.; Calis, A.; De Haan, K.; Ozcan, A. Bright-field holography: Cross-modality deep learning enables snapshot 3D imaging with bright-field contrast using a single hologram. Light Sci. Appl. 2019, 8, 1–7. [Google Scholar] [CrossRef]
- Terbe, D.; Orzó, L.; Zarándy, Á. Deep-learning-based bright-field image generation from a single hologram using an unpaired dataset. Opt. Lett. 2021, 46, 5567–5570. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.J.; Wang, C.; Zhao, B.; Im, H.; Min, J.; Choi, H.J.; Tadros, J.; Choi, N.R.; Castro, C.M.; Weissleder, R.; et al. Deep transfer learning-based hologram classification for molecular diagnostics. Sci. Rep. 2018, 8, 17003. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Yeung, C.H.; Lam, E.Y. Holographic classifier: Deep learning in digital holography for automatic micro-objects classification. In Proceedings of the 2020 IEEE 18th International Conference on Industrial Informatics (INDIN), Warwick, UK, 20–23 July 2020; Volume 1, pp. 515–520. [Google Scholar]
- Zhu, Y.; Yeung, C.H.; Lam, E.Y. Microplastic pollution monitoring with holographic classification and deep learning. J. Phys. Photonics 2021, 3, 024013. [Google Scholar] [CrossRef]
- MacNeil, L.; Missan, S.; Luo, J.; Trappenberg, T.; LaRoche, J. Plankton classification with high-throughput submersible holographic microscopy and transfer learning. BMC Ecol. Evol. 2021, 21, 1–11. [Google Scholar] [CrossRef]
- Alakwaa, W.; Nassef, M.; Badr, A. Lung cancer detection and classification with 3D convolutional neural network (3D-CNN). Int. J. Adv. Comput. Sci. Appl. 2017, 8. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.P.; Wang, L.; Gupta, S.; Goli, H.; Padmanabhan, P.; Gulyás, B. 3D deep learning on medical images: A review. Sensors 2020, 20, 5097. [Google Scholar] [CrossRef]
- Song, W.; Li, D.; Sun, S.; Zhang, L.; Xin, Y.; Sung, Y.; Choi, R. 2D&3DHNet for 3D Object Classification in LiDAR Point Cloud. Remote Sens. 2022, 14, 3146. [Google Scholar]
- Wang, J.; Zhang, Z.; Huang, Y.; Li, Z.; Huang, Q. A 3D convolutional neural network based near-field acoustical holography method with sparse sampling rate on measuring surface. Measurement 2021, 177, 109297. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Z.; Li, Z.; Huang, Q. Research on joint training strategy for 3D convolutional neural network based near-field acoustical holography with optimized hyperparameters. Measurement 2022, 202, 111790. [Google Scholar] [CrossRef]
- Matsushima, K.; Shimobaba, T. Band-limited angular spectrum method for numerical simulation of free-space propagation in far and near fields. Opt. Express 2009, 17, 19662–19673. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, H.; Huang, L.; Liu, T.; Ozcan, A. Fourier Imager Network (FIN): A deep neural network for hologram reconstruction with superior external generalization. arXiv 2022, arXiv:2204.10533. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Input Type | Accuracy | NLLLoss |
|---|---|---|---|
| 2D-model | in focus | ||
| 3D-model | in focus | ||
| 2D-model-augm | in focus | ||
| 3D-model-augm | in focus | ||
| 2D-model | defocused | ||
| 3D-model | defocused | ||
| 2D-model-augm | defocused | ||
| 3D-model-augm | defocused |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Terbe, D.; Orzó, L.; Zarándy, Á. Classification of Holograms with 3D-CNN. Sensors 2022, 22, 8366. https://doi.org/10.3390/s22218366
Terbe D, Orzó L, Zarándy Á. Classification of Holograms with 3D-CNN. Sensors. 2022; 22(21):8366. https://doi.org/10.3390/s22218366
Chicago/Turabian StyleTerbe, Dániel, László Orzó, and Ákos Zarándy. 2022. "Classification of Holograms with 3D-CNN" Sensors 22, no. 21: 8366. https://doi.org/10.3390/s22218366
APA StyleTerbe, D., Orzó, L., & Zarándy, Á. (2022). Classification of Holograms with 3D-CNN. Sensors, 22(21), 8366. https://doi.org/10.3390/s22218366