



Prediction of Traffic Vibration Environment of Ancient Wooden Structures Based on the Response Transfer Ratio Function

Abstract
:1. Introduction
2. Prediction Method of the Response Transfer Ratio Function
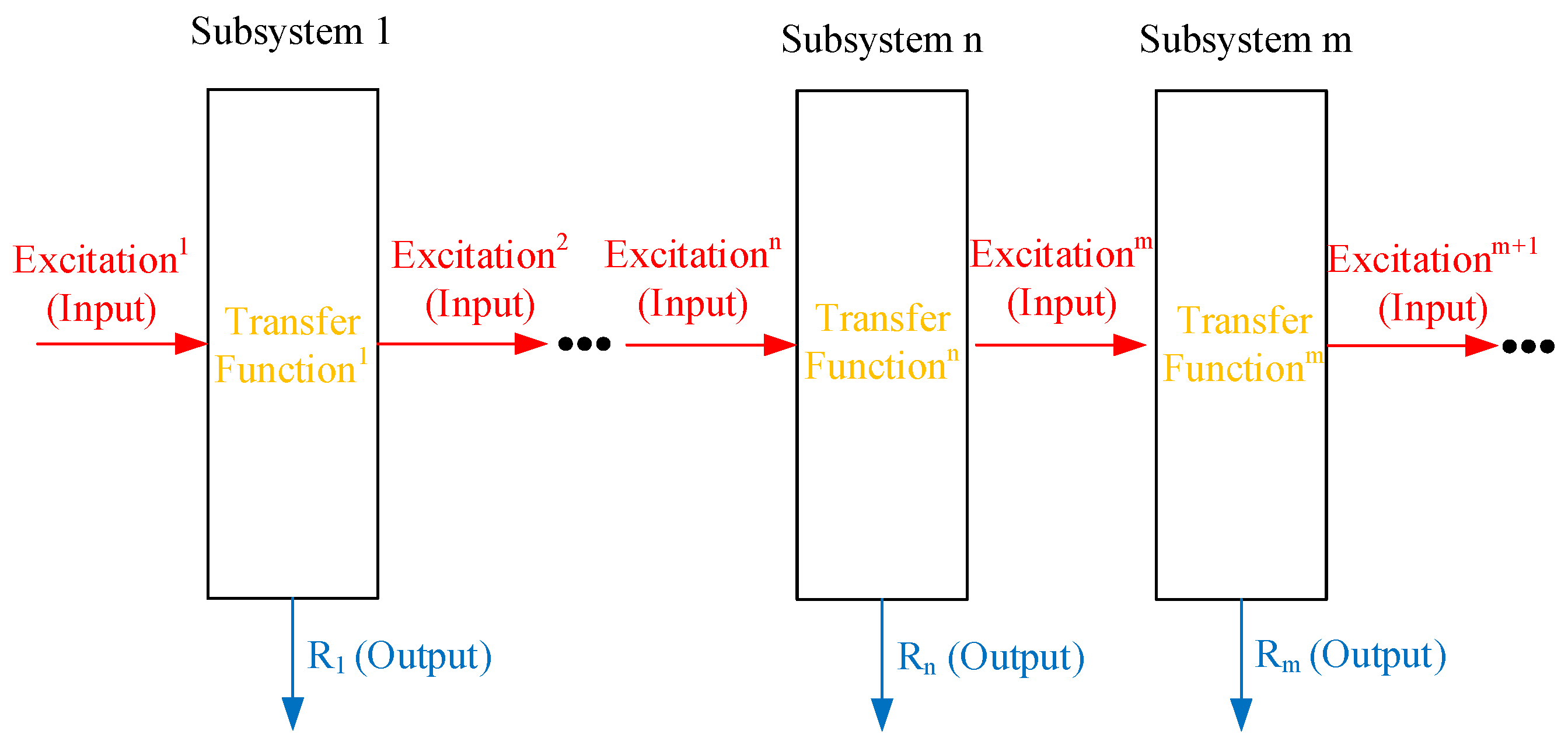
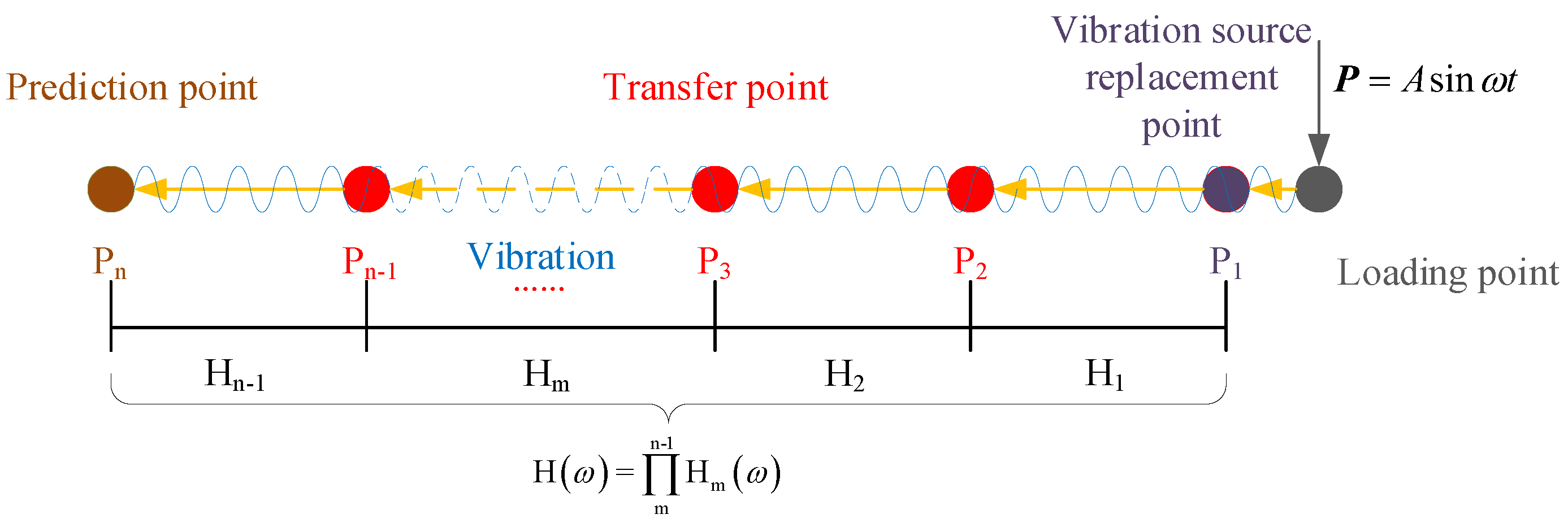
2.1. The Transfer Function and the Response Transfer Ratio Function
2.2. Vibration Prediction Based on the RTR
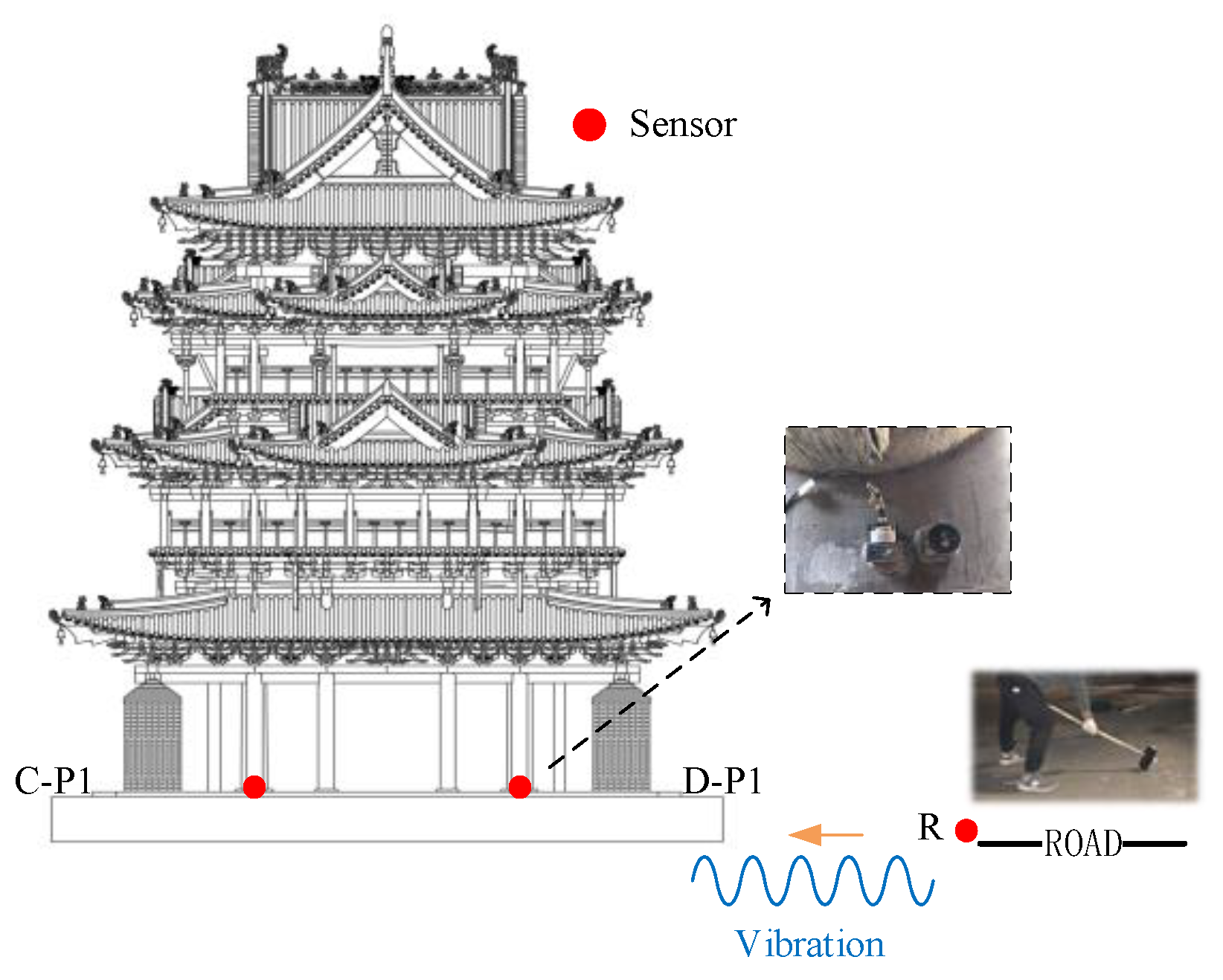
2.3. Field Test of the RTR Function
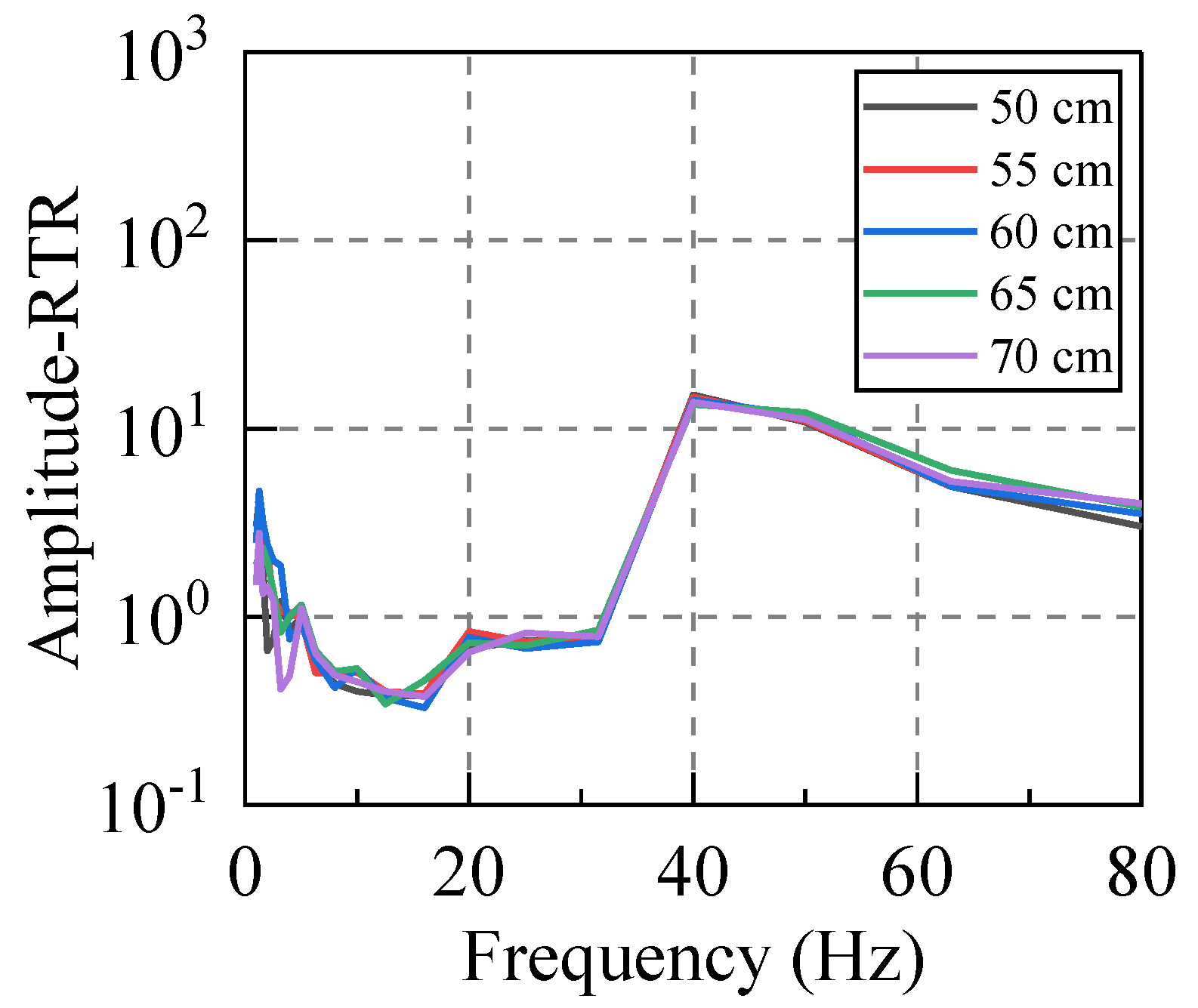
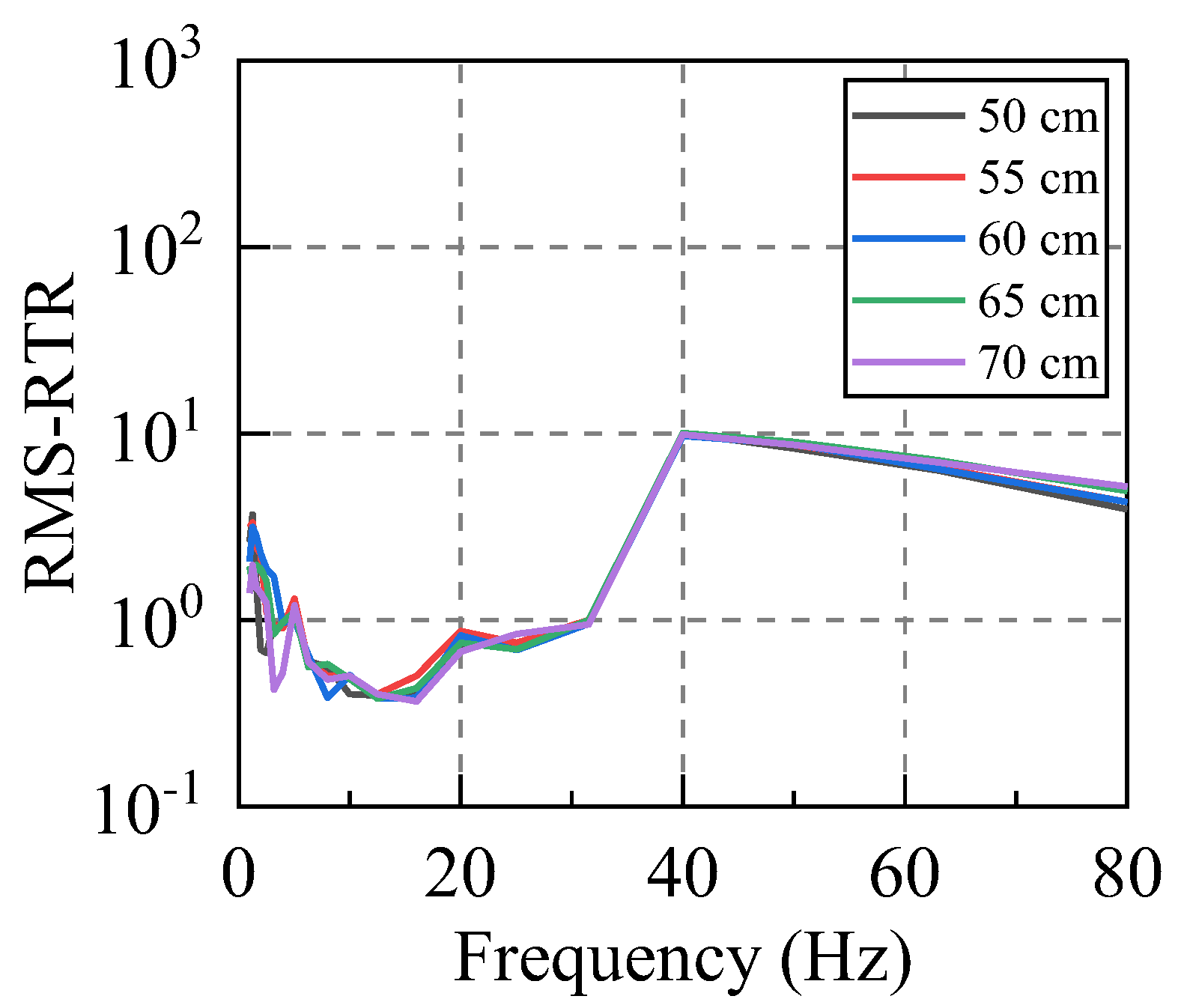
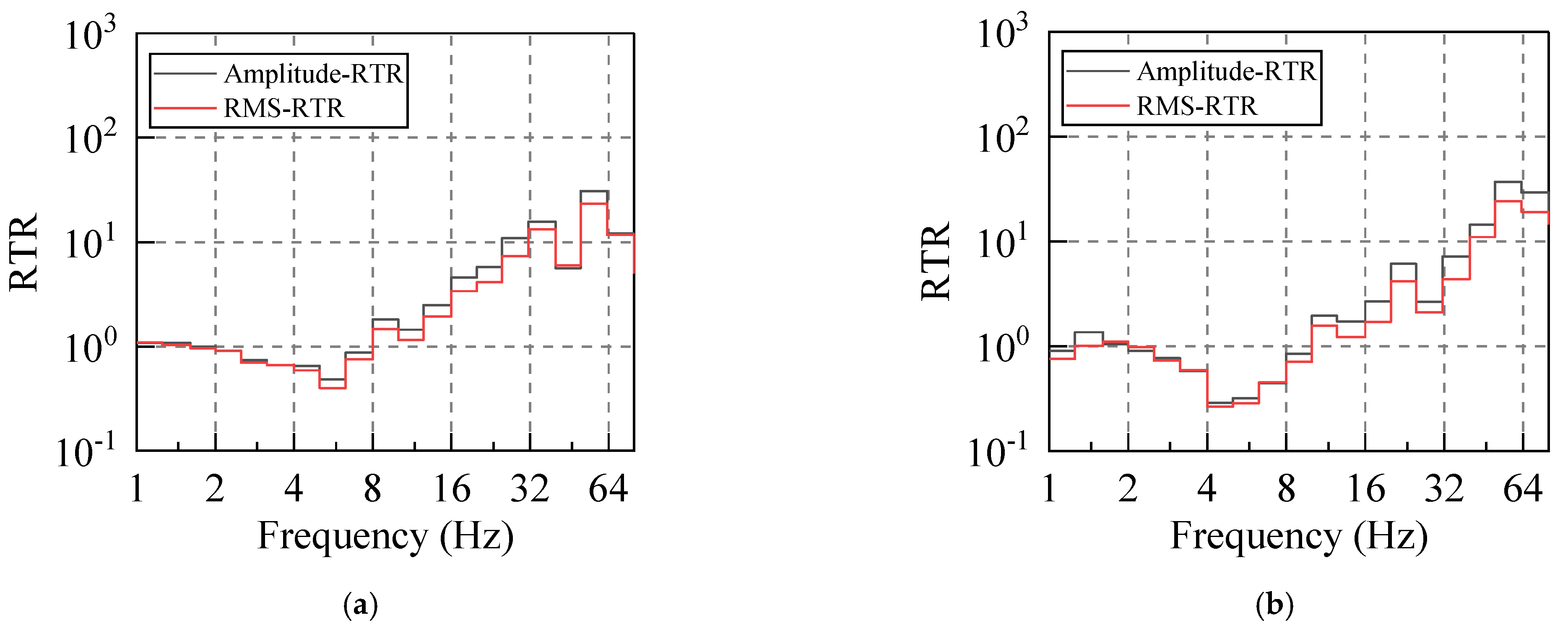
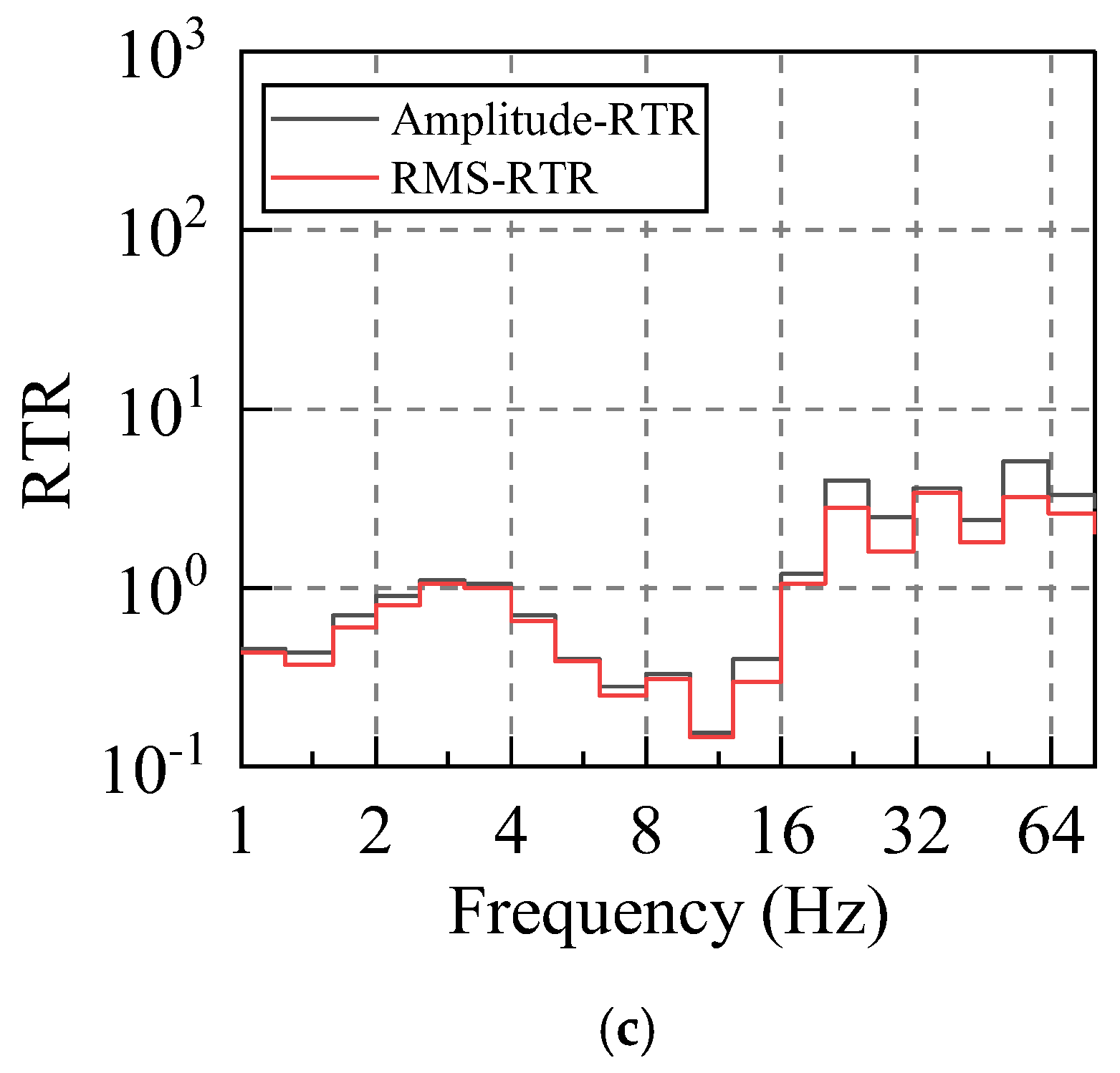
2.3.1. Variation of the RTR Function with Excitation Vibration Energy
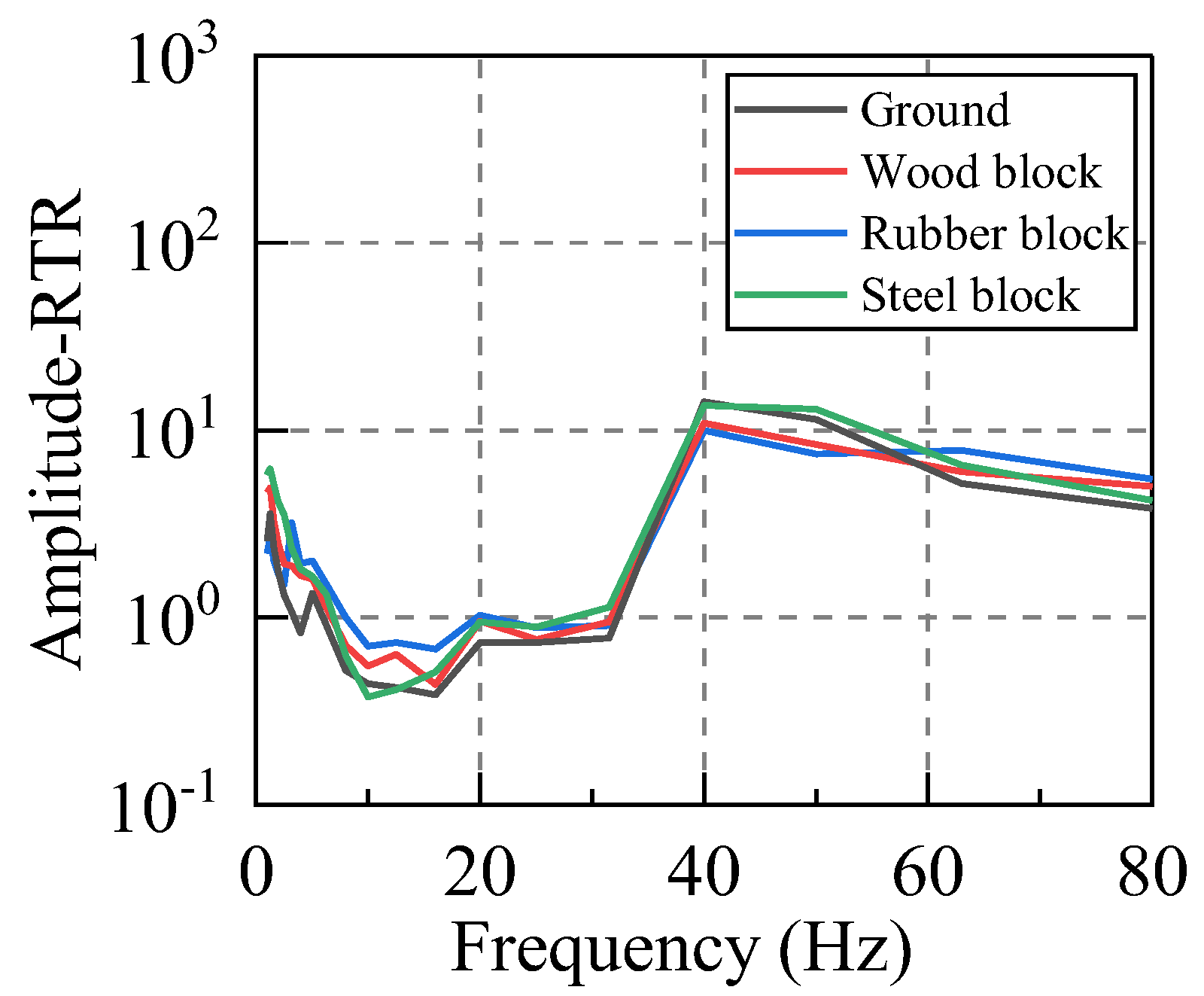
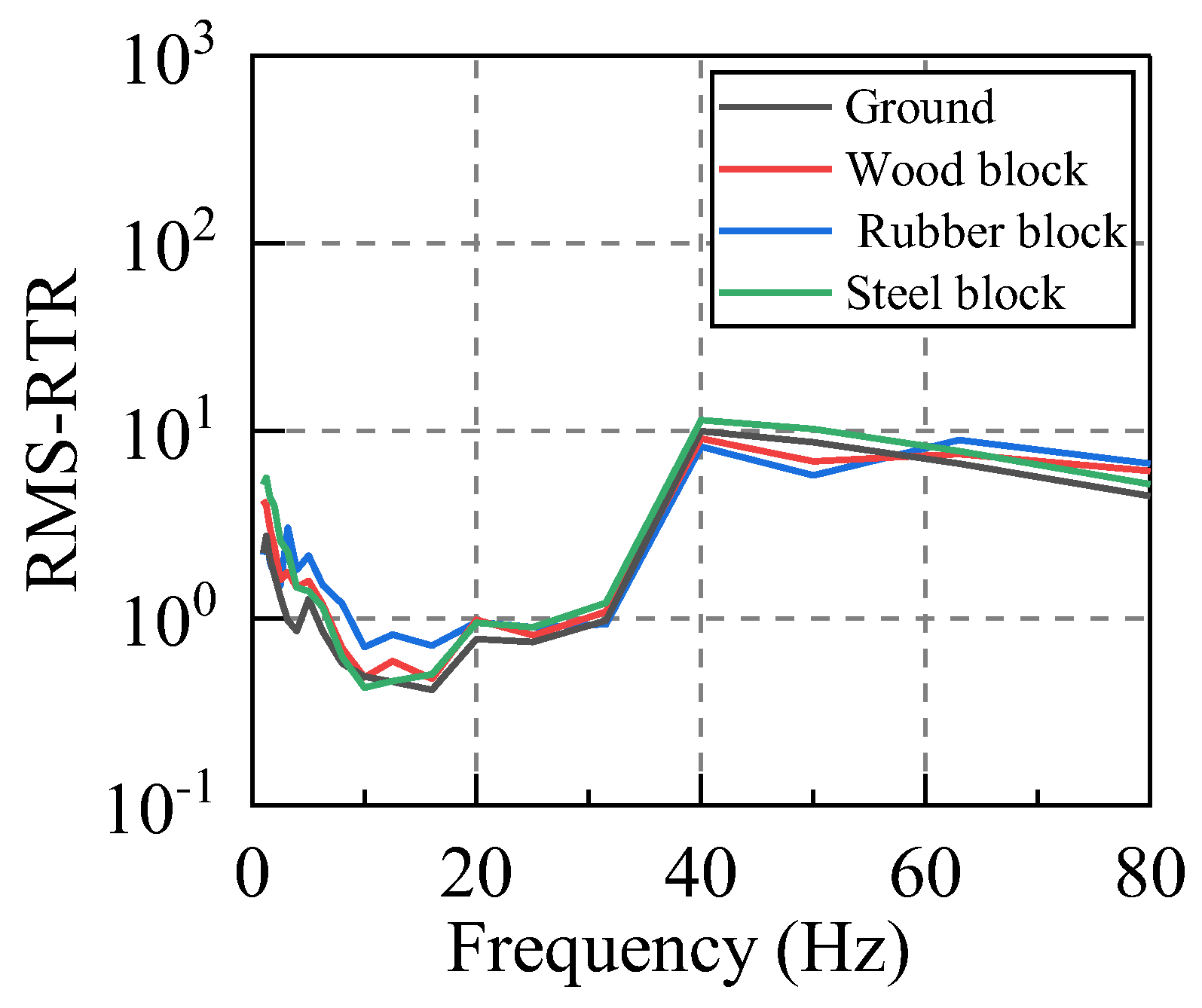
2.3.2. Variation of the RTR Function with Excitation Vibration Frequency
3. Vibration Prediction Based on the Measured RTR Function
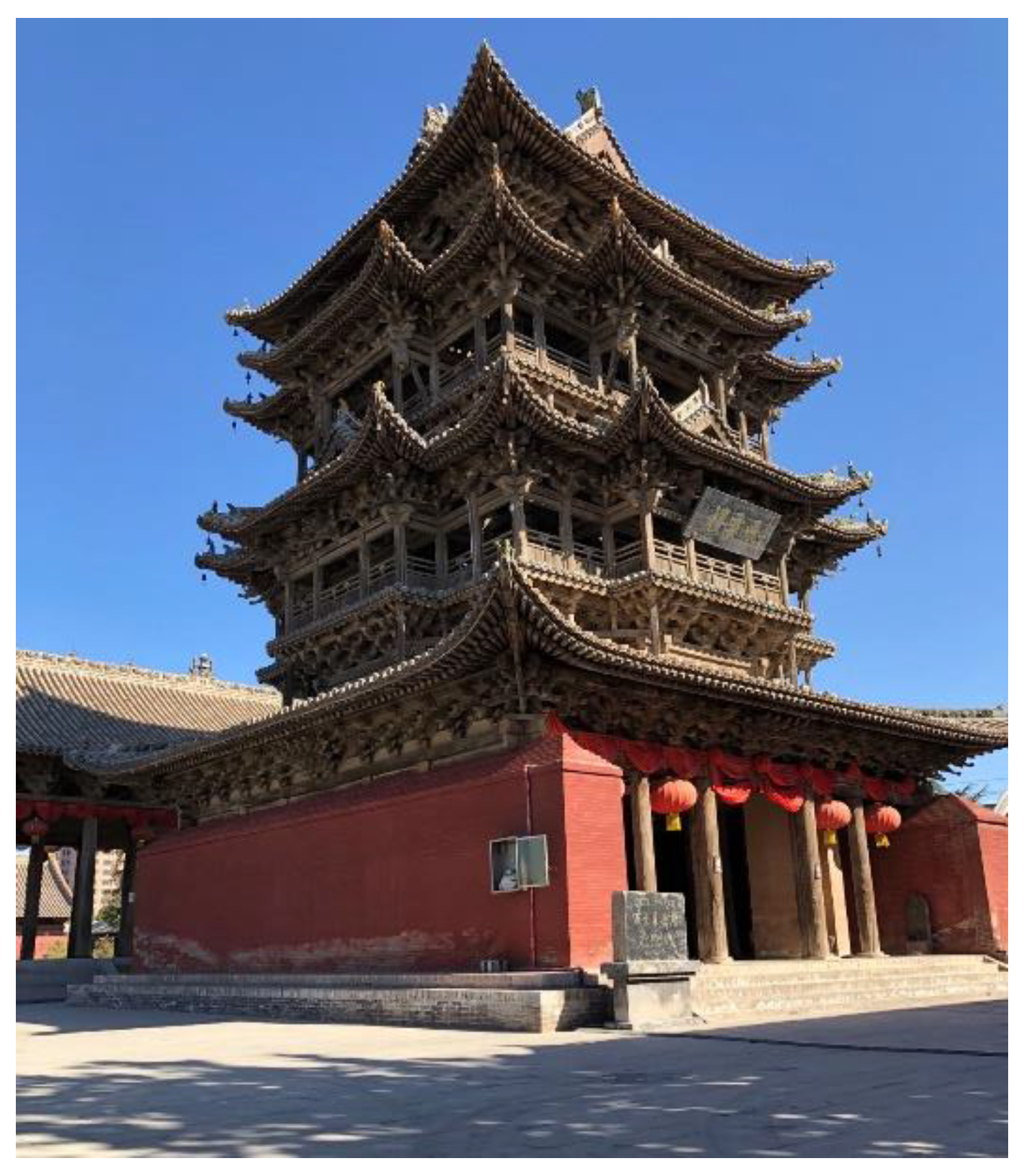
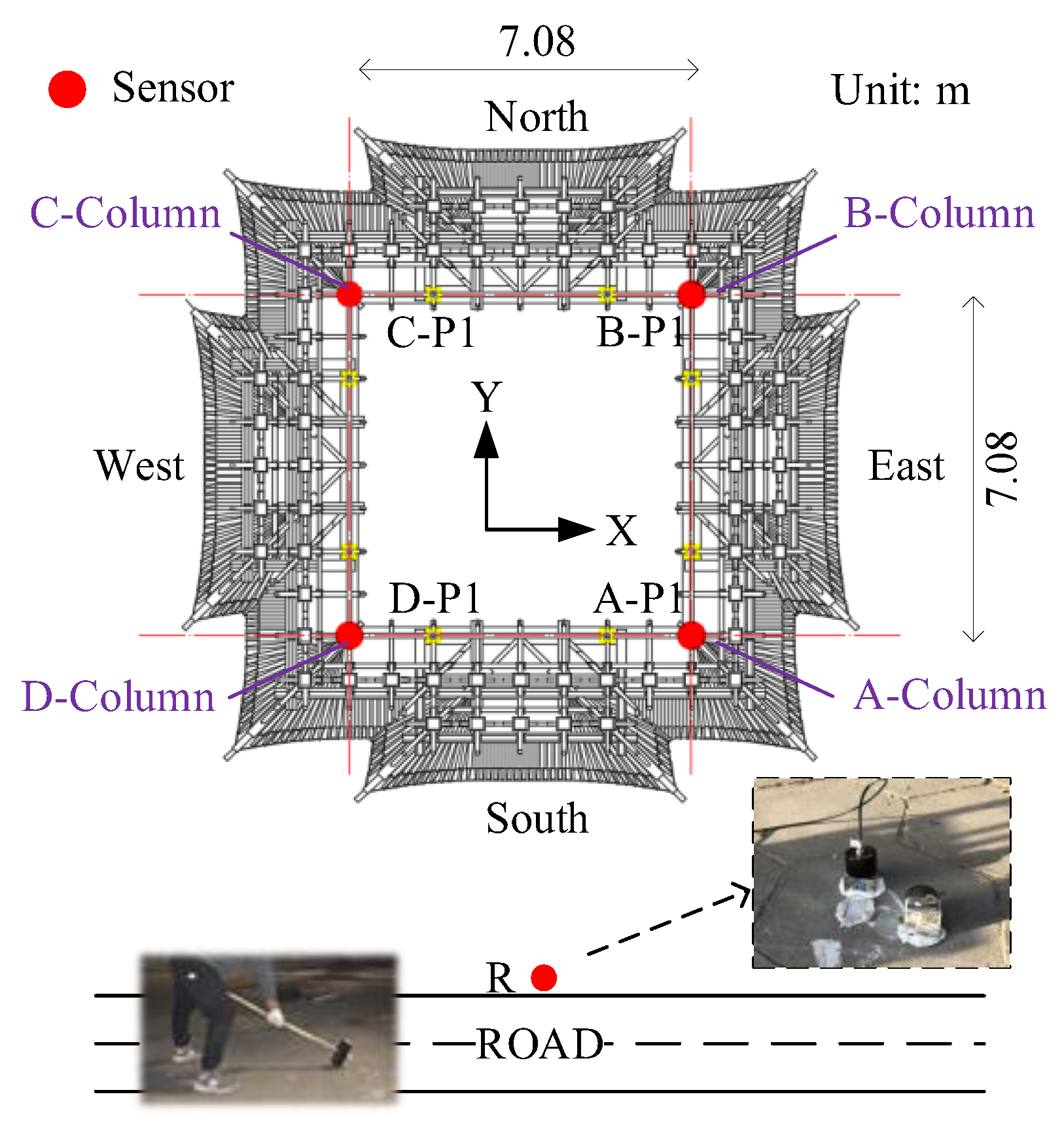
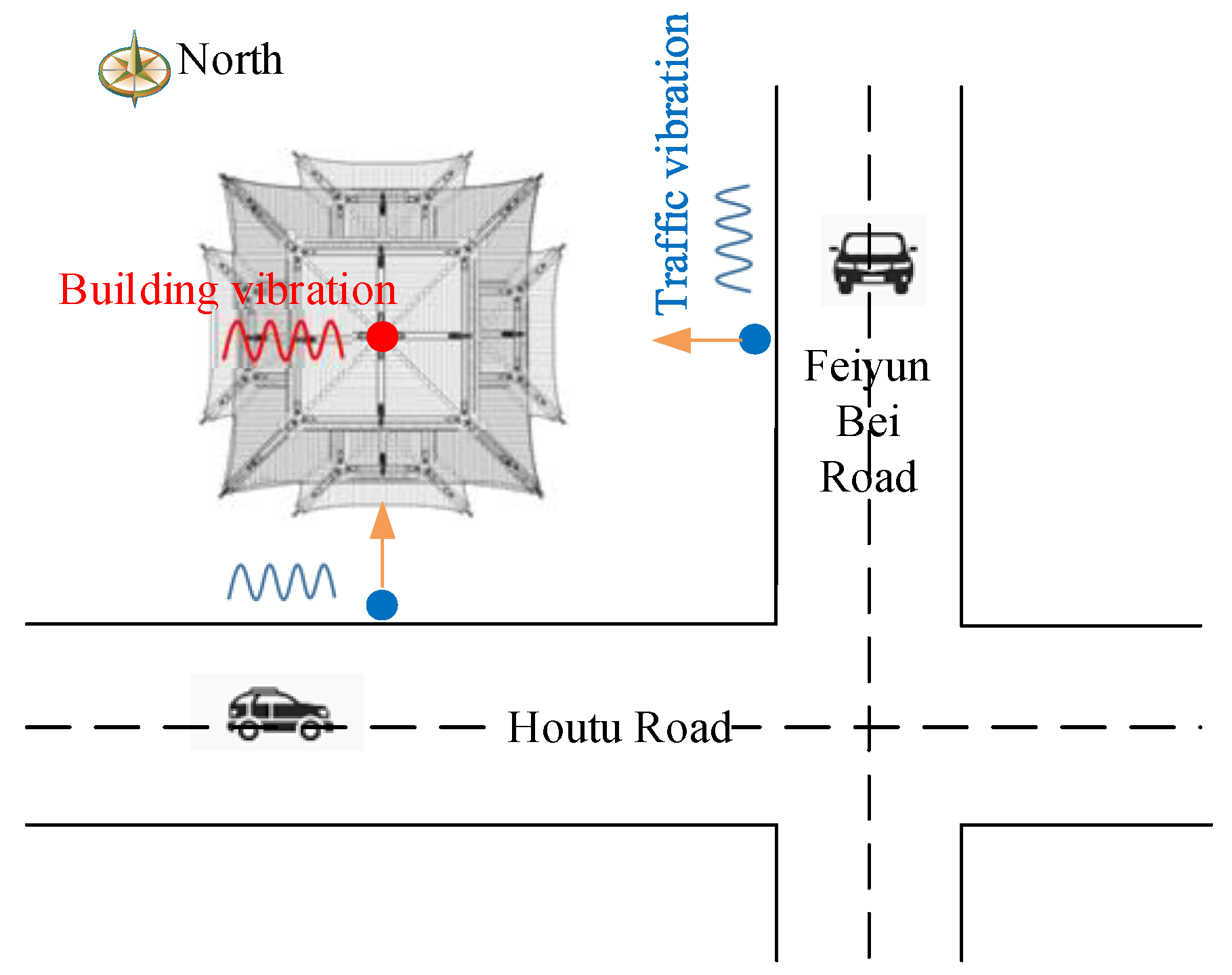
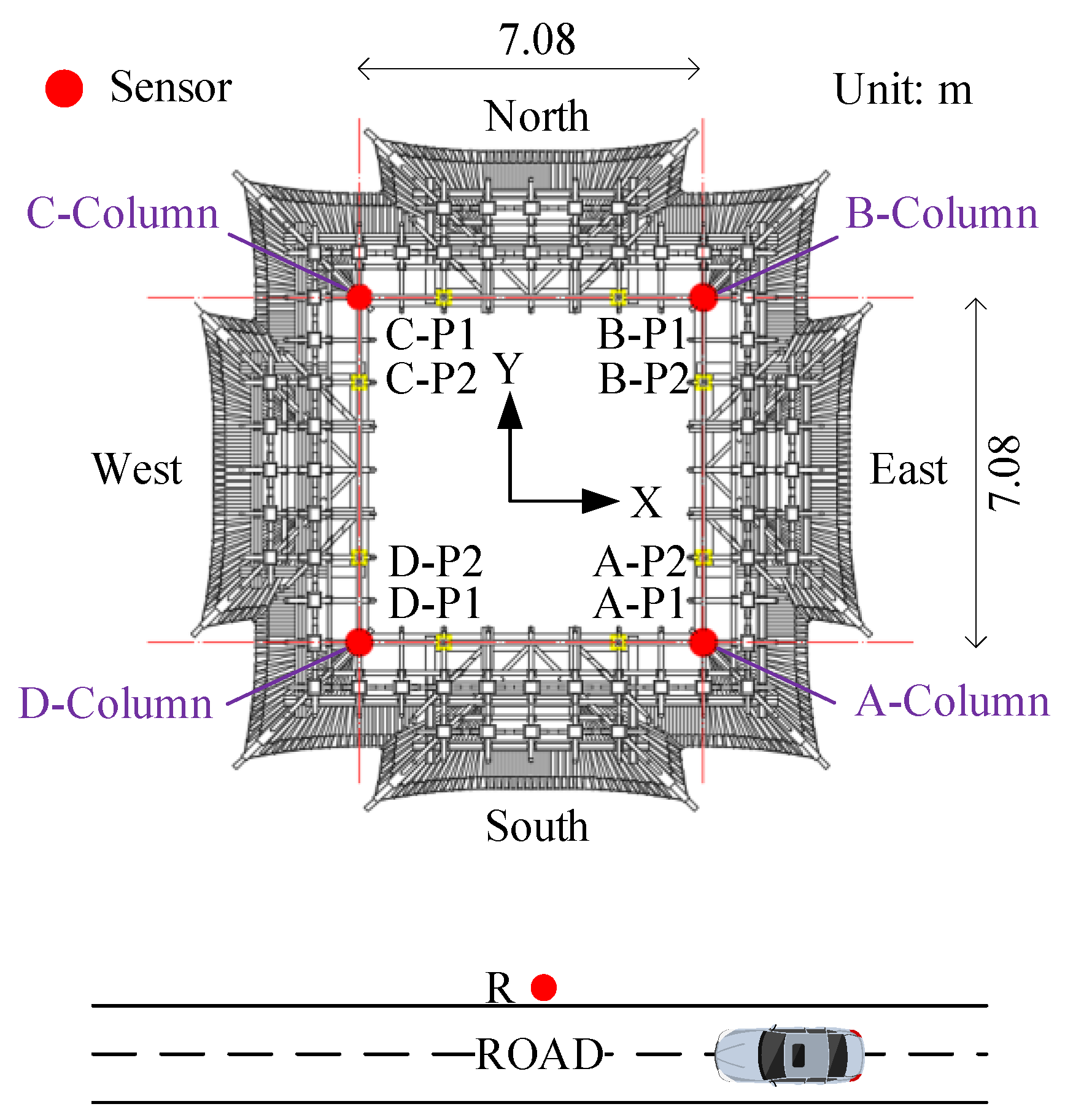
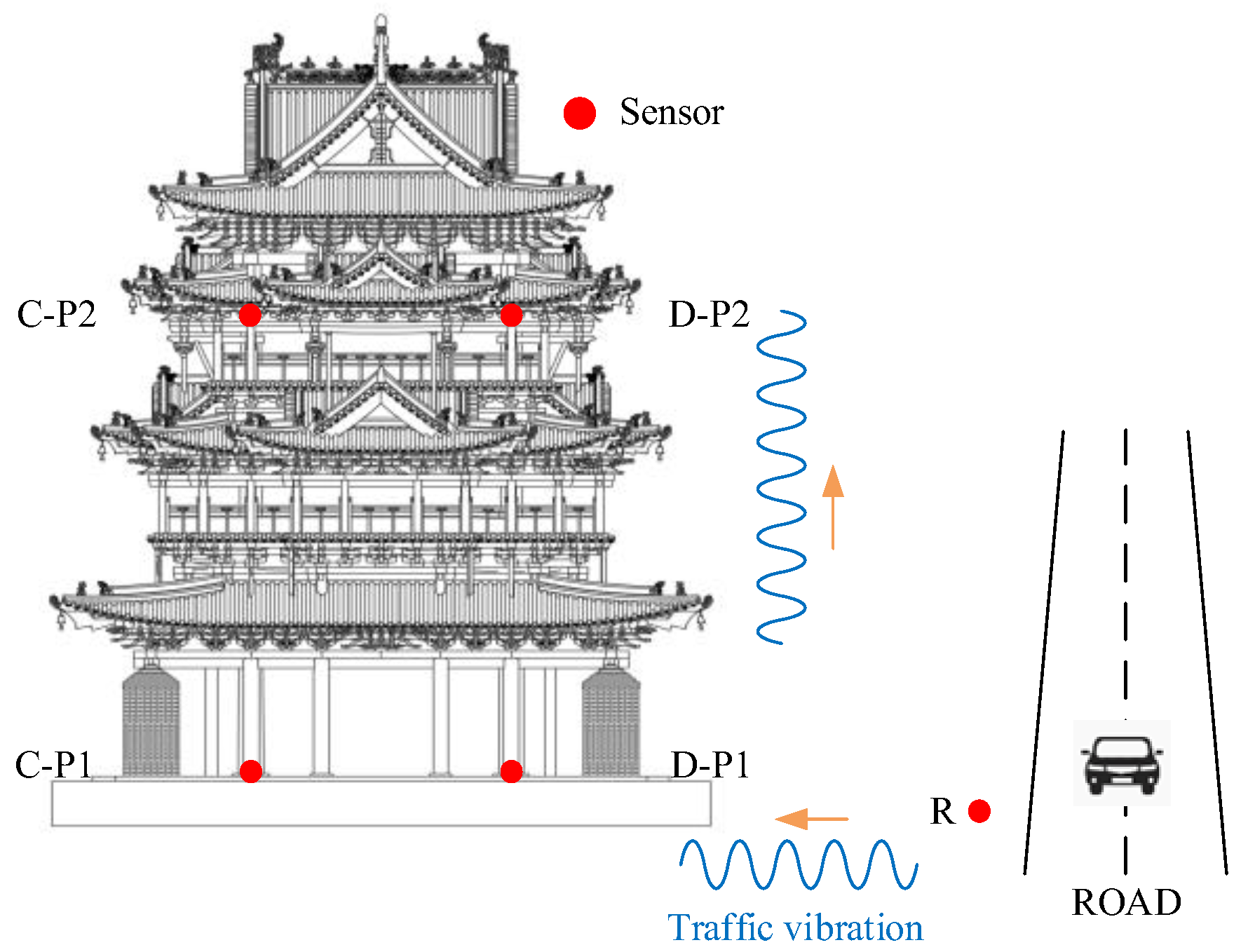
3.1. Introduction to the On−Site Dynamic Test
3.2. The On−Site Test of the Multi−Point RTR
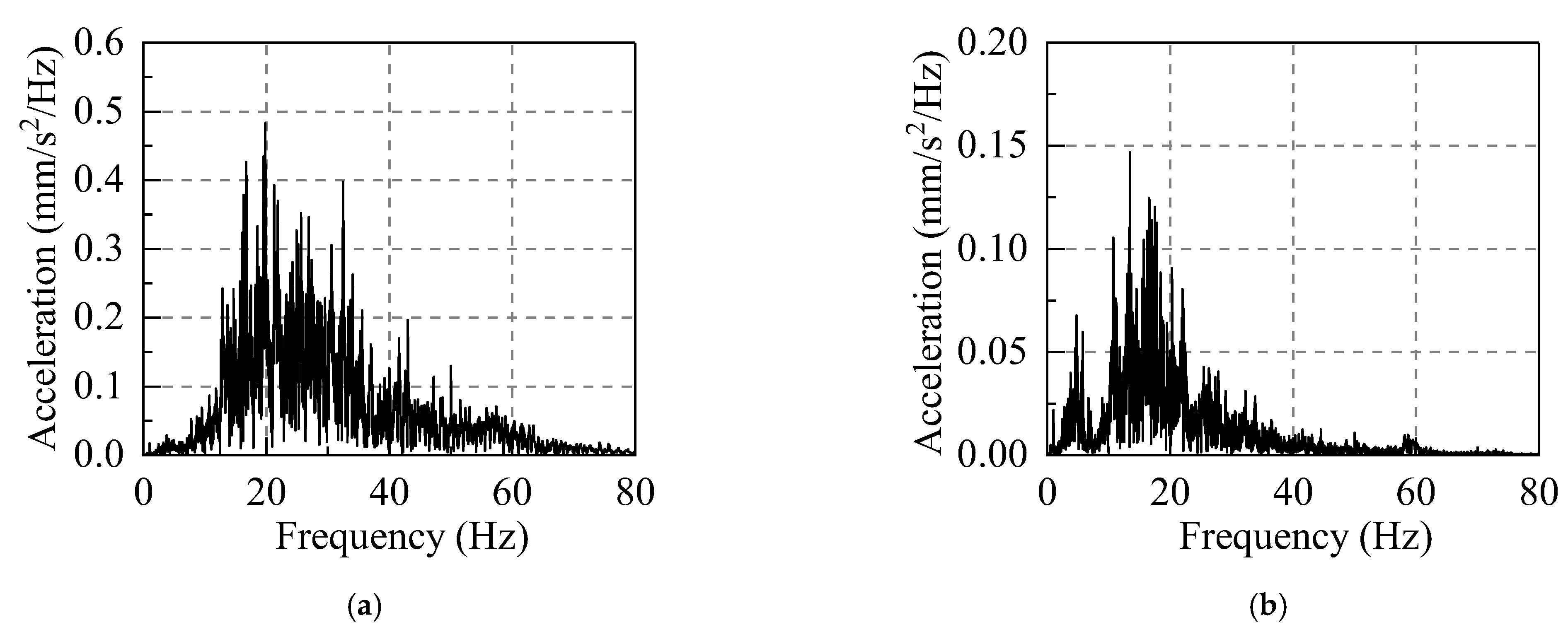
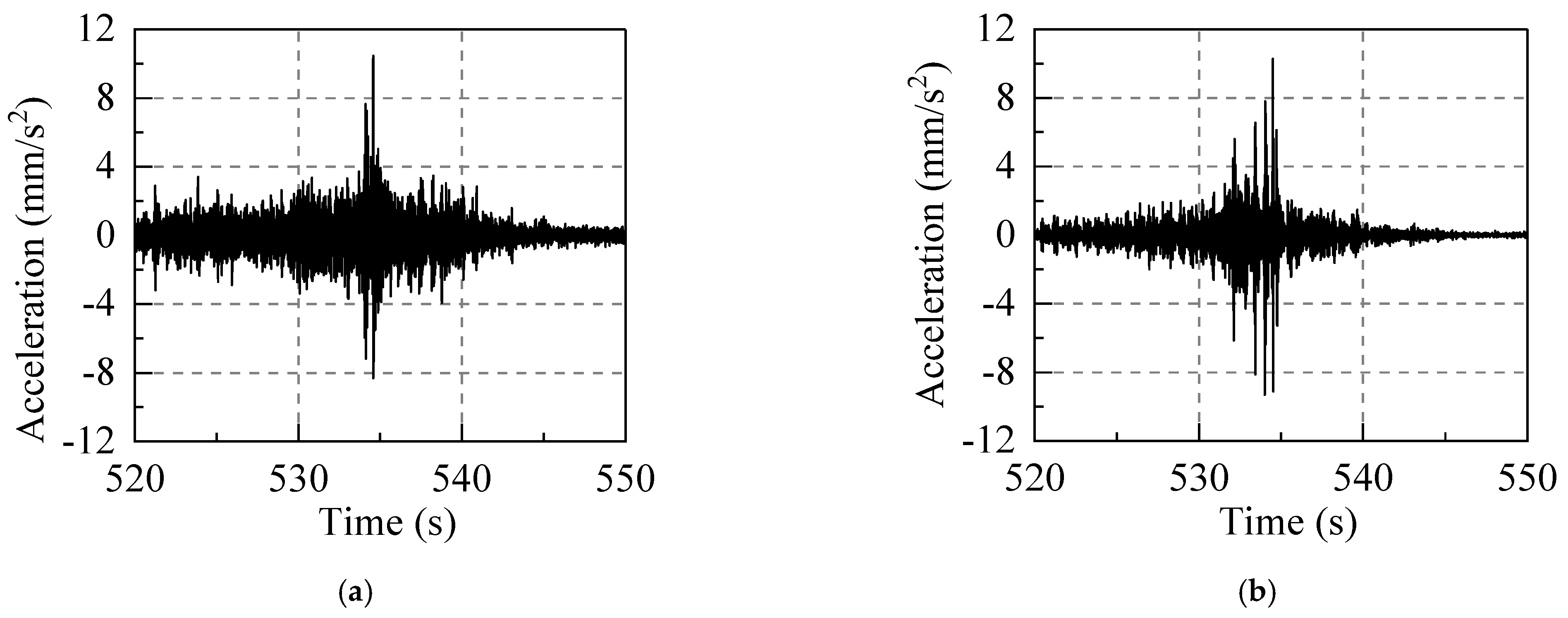
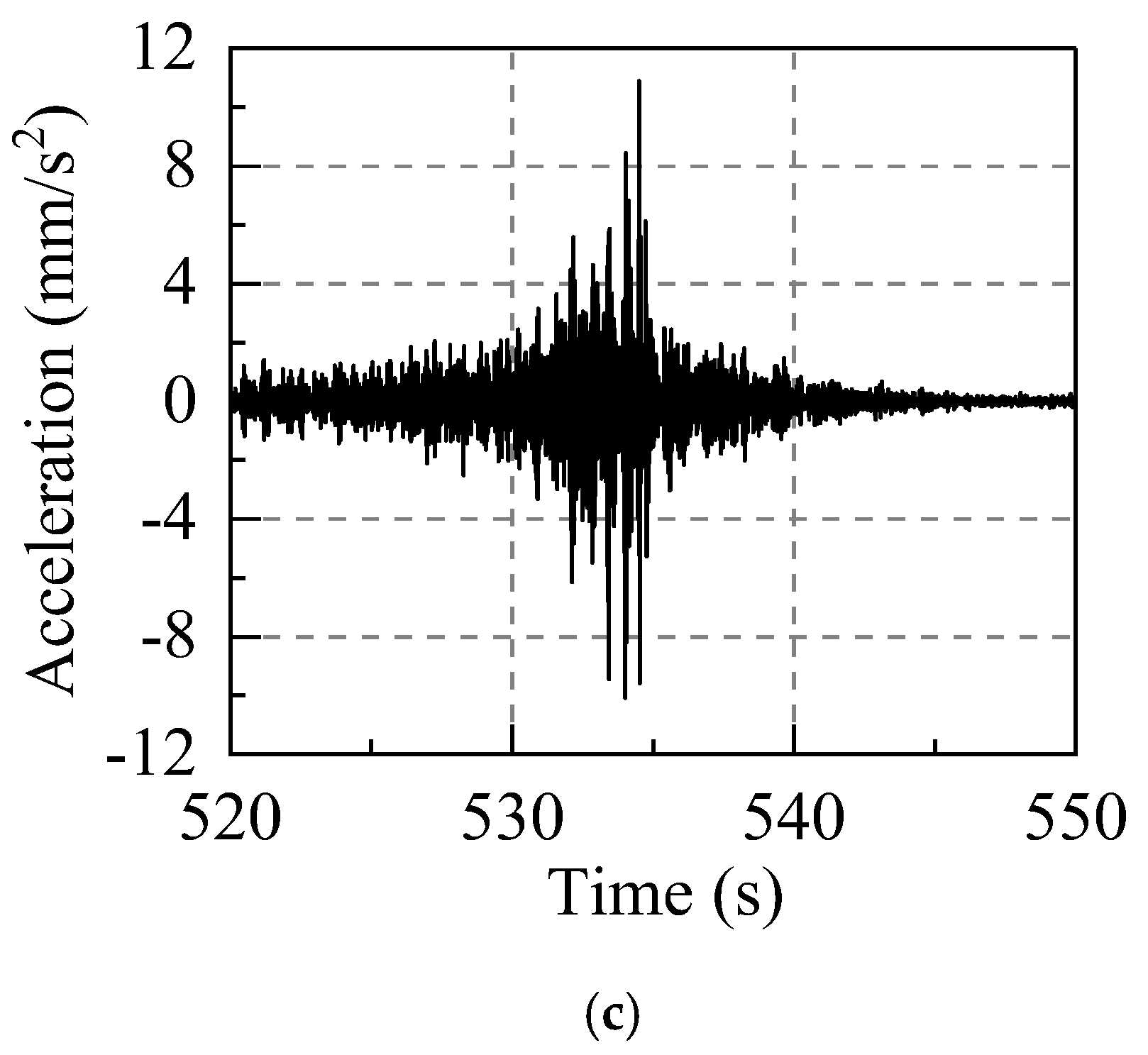
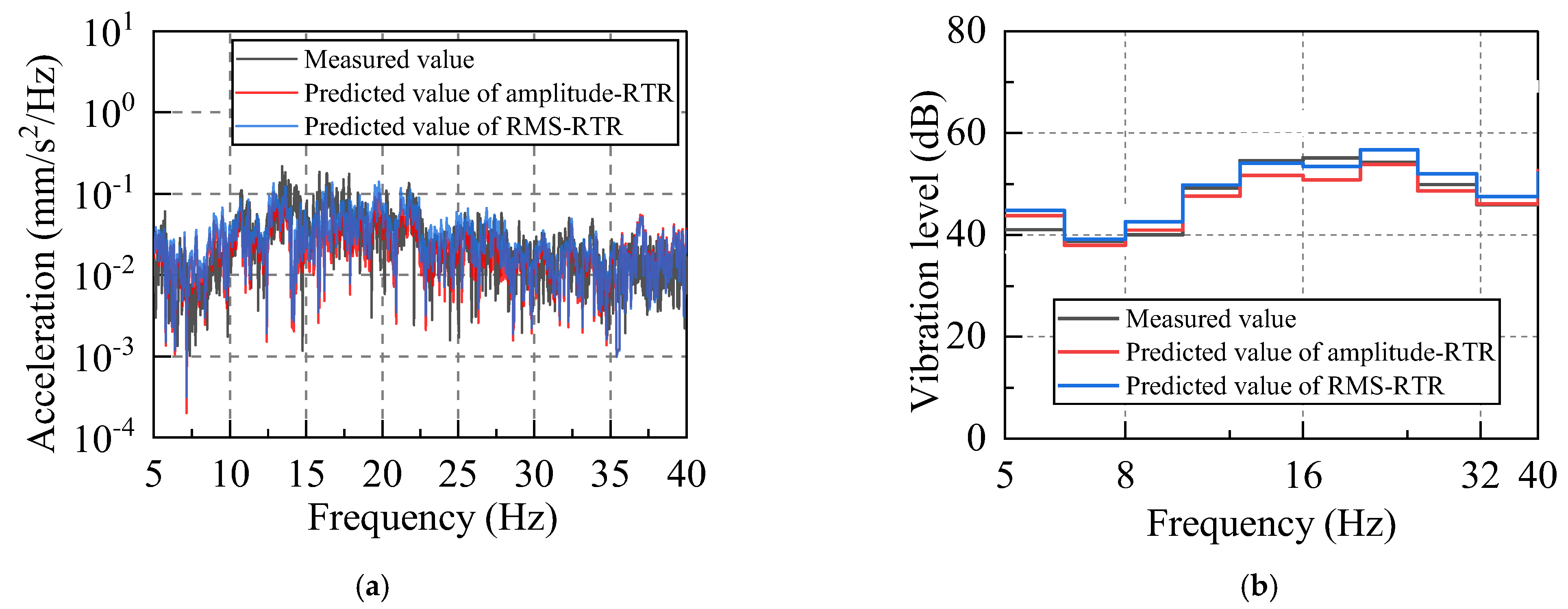
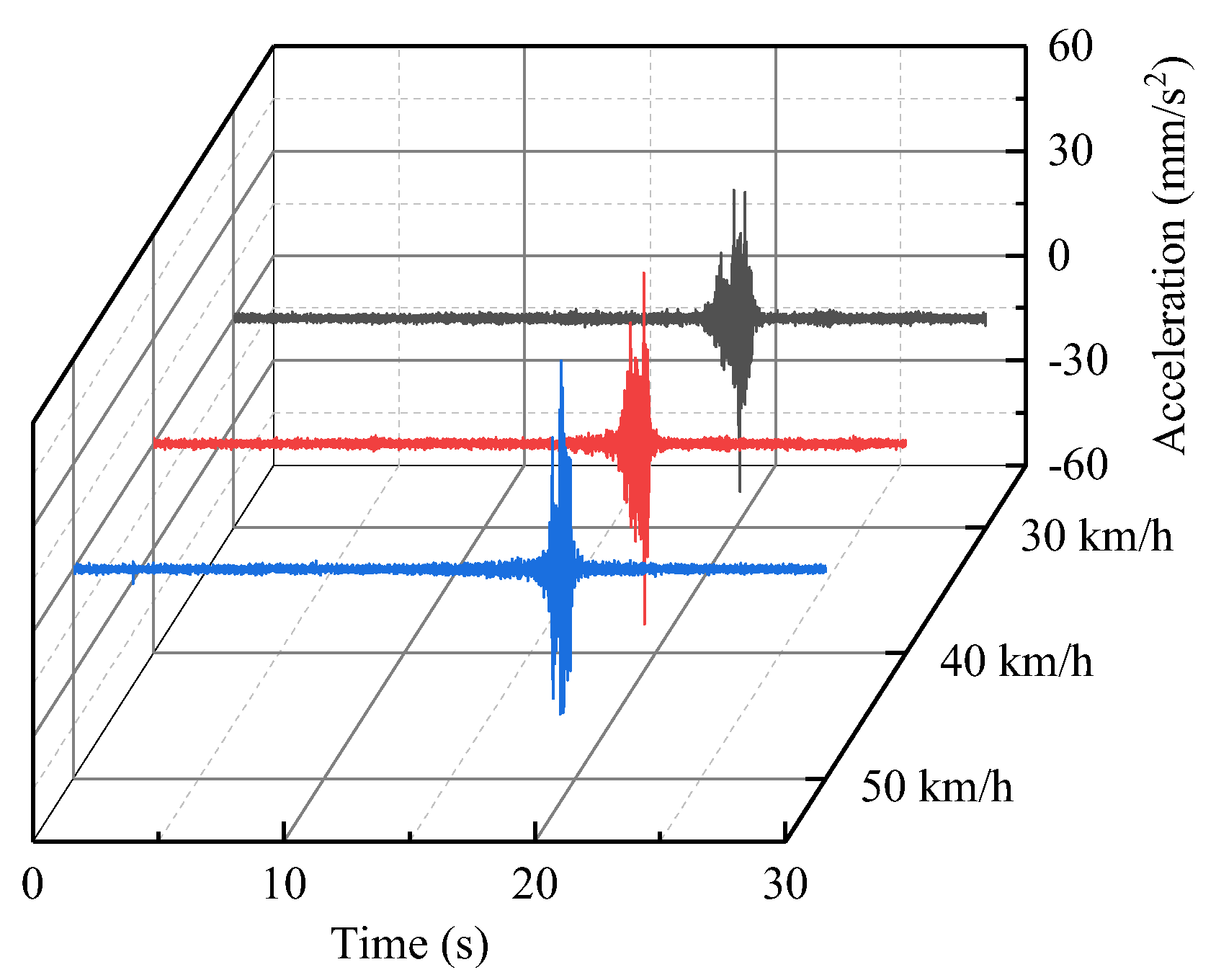
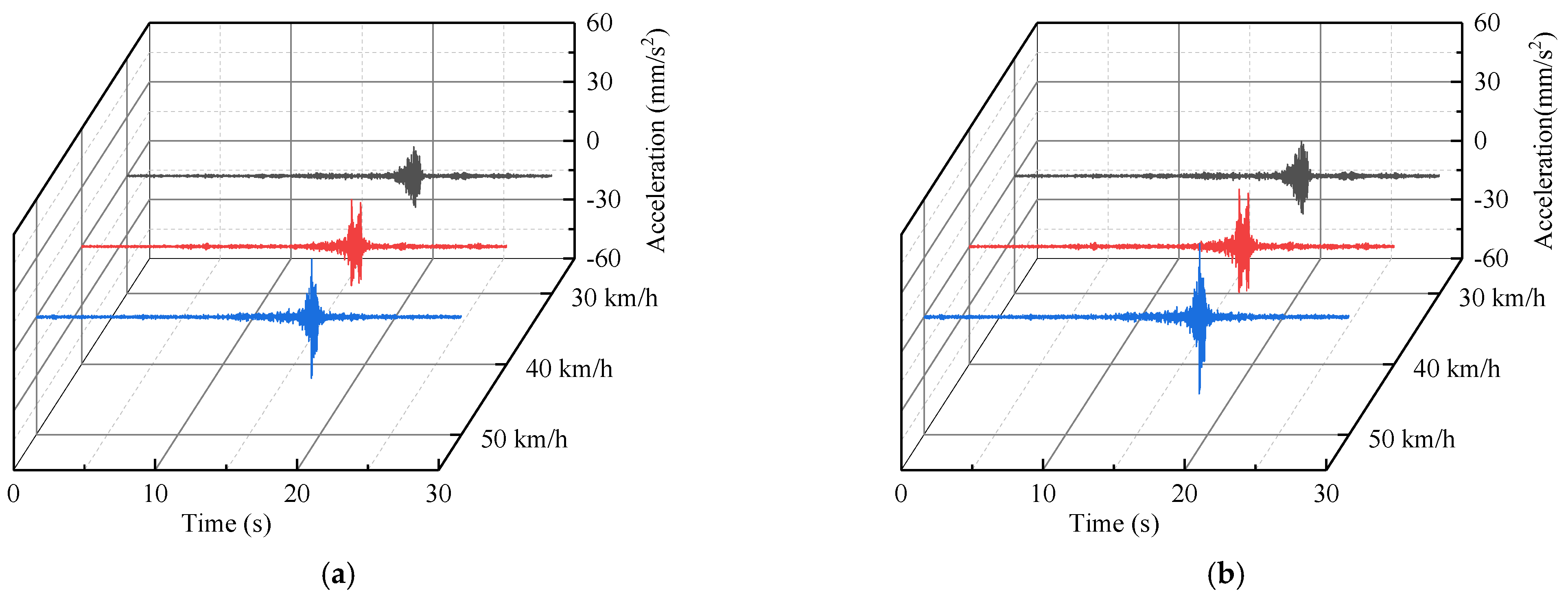
3.3. Structural Vibration Prediction due to Traffic−Induced Vibration
3.4. Evaluate Prediction Accuracy
4. Prediction and Evaluation of Structural Safety of the Feiyun Pavilion due to Extreme Traffic Loading
5. Conclusions
- (1)
- The multipoint RTR was derived, and showed that the RTR function is the inherent property of the structure and does not alter with excitation load energy and frequency;
- (2)
- Based on the RTR function, a vibration prediction method suitable for the ancient wooden structures subjected to traffic−induced vibration was proposed. By comparing with the measured data, the prediction results represented a good accuracy in both the time and frequency domains;
- (3)
- The structural vibration of the Feiyun Pavilion due to extreme traffic loads was predicted, and the corresponding structural safety was evaluated according to the “Technical specifications for protection of historic buildings against man−made vibration”. The calculation results reveal that in the Feiyun Pavilion area, it is necessary to restrict the type and speed of vehicles to protect the ancient wooden structures from traffic−induced vibrations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, Y.M.; Wang, F.X.; Zhang, Y.S. Ansys Method and vibration characteristics of field vibrations induced by high-speed trains. J. China Railw. Soc. 2017, 39, 118–124. [Google Scholar]
- Liu, W.F.; Liu, W.N.; Nie, Z.L.; Wu, Z.Z.; Li, K.F. Prediction of effects of vibration induced by running metro trains on sensitive instruments. J. Vib. Shock 2013, 32, 18–23. [Google Scholar]
- Zhang, P.F.; Lei, X.Y.; Gao, L.; Liu, Q.J. Study on the ground vibration and its impact on precision instruments induced by freight train. J. Railw. Sci. Eng. 2013, 10, 108–113. [Google Scholar]
- Hu, W.B.; Yang, J.; Wu, Y.H.; Meng, Z.B. The calculation of ancient wooden pillars horizontal velocity under the traffic load. J. Xi’an Univ. Archit. Technol. Nat. Sci. Ed. 2019, 51, 315–320. [Google Scholar]
- Jia, X.P. Study on Vibration Caused by Subway and Its Impact for Buildings. Master’s Thesis, Tongji University, Shanghai, China, 2008. [Google Scholar]
- Xia, H.; Cao, Y.M.; Roeck, G.D. Theoretical modeling and characteristic analysis of moving-train induced ground vibrations. J. Vib. Eng. 2009, 329, 819–832. [Google Scholar] [CrossRef]
- Lombaert, G.; Degrande, G. Ground-borne vibration due to static and dynamic axle loads of InterCity and high-speed trains. J. Sound Vib. 2009, 319, 1036–1066. [Google Scholar] [CrossRef]
- Zou, C.; Moore, J.A.; Sanayei, M.; Wang, Y. Impedance model for estimating train-induced building vibrations. Eng. Struct. 2018, 172, 739–750. [Google Scholar] [CrossRef]
- Ma, M.; Lui, W.N.; Ding, D.Y. Influence of metro train-induced vibration on Xi’an Bell Tower. J. Beijing Jiaotong Univ. 2010, 34, 88–90. [Google Scholar]
- Ma, M.; Liu, W.N.; Qian, C.Y.; Deng, G.H.; Li, Y.D. Study of the train-induced vibration impact on a historic Bell Tower above two spatially overlapping metro lines. Soil Dyn. Earthq. Eng. 2016, 81, 58–74. [Google Scholar] [CrossRef]
- Kouroussis, G.; Parys, L.V.; Conti, C.; Verlinden, O. Prediction of ground vibrations induced by urban railway traffic: An analysis of the coupling assumptions between vehicle, track, soil, and buildings. Int. J. Acoust. Vib. 2013, 18, 163–172. [Google Scholar] [CrossRef]
- Coulier, P.; Lombaert, G.; Degrande, G. The influence of source–receiver interaction on the numerical prediction of railway induced vibrations. J. Sound Vib. 2014, 333, 2520–2538. [Google Scholar] [CrossRef]
- Yan, W.M.; Nie, H.; Ren, M.; Feng, J.H.; Zhang, Y.W.; Chen, J.Q. In situ experiment and analysis of ground surface vibration induced by urban subway transit. J. Railw. Sci. Eng. 2006, 3, 1–5. [Google Scholar]
- Agata, S.; Anna, J.G.; Robert, J. The idea of using Bayesian networks in forecasting impact of traffic-induced vibration transmitted through the ground on residential buildings. Geosciences 2019, 9, 339–352. [Google Scholar]
- Giacomo, Z.; Michele, B.; Gianni, B. Experimental analysis of the traffic-induced-vibration on an ancient lodge. Struct. Control Health Monit. 2022, 29, e2900. [Google Scholar]
- Ivo, H.; Marijan, B.; Stjepan, L. Analysis of Tram Traffic-Induced Vibration Influence on Earthquake Damaged Buildings. Buildings 2021, 11, 590. [Google Scholar] [CrossRef]
- Tao, Z.; Wang, Y.; Sanayei, M.; Moore, J.A.; Zou, C. Experimental study of train-induced vibration in over-track buildings in a metro depot. Eng. Struct. 2019, 198, 109473. [Google Scholar] [CrossRef]
- Zou, C.; Moore, J.A.; Sanayei, M.; Tao, Z.; Wang, Y. Impedance Model of Train-Induced Vibration Transmission Across a Transfer Structure into an Over Track Building in a Metro Depot. J. Struct. Eng. 2022, 148, 04022187. [Google Scholar] [CrossRef]
- Verbraken, H.; Lombaert, G.; Degrande, G. Verification of an empirical prediction method for railway induced vibrations by means of numerical simulations. J. Sound Vib. 2011, 330, 1692–1703. [Google Scholar] [CrossRef]
- Vogiatzis, K. Protection of the cultural heritage from underground metro vibration and ground-borne noise in Athens centre: The case of the Kerameikos Archaeological Museum and Gazi Cultural Centre. Int. J. Acoust. Vib. 2012, 17, 59–72. [Google Scholar] [CrossRef]
- Chen, J.M. Principles of Automatic Control; National Defense Industry Press: Beijing, China, 2014. [Google Scholar]
- Zhang, C.; Zhang, N.; Wang, J.; Yao, J.B. Vibration reduction and isolation performance of a platform foundation and column base of an ancient wooden structure based on the energy transfer analysis. J. Low Freq. Noise Vib. Act. Control 2022, 41, 14613484221082635. [Google Scholar] [CrossRef]
- Ministry of Housing and Urban Rural Development of the People’s Republic of China. Technical Specifications for Protection of Historic Buildings against Man-Made Vibration; China Building Industry Press: Beijing, China, 2008. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | |||||||
|---|---|---|---|---|---|---|---|
| Test Name | Working Condition | Measuring Point Location | |||||
| Condition 1 | Condition 2 | Condition 3 | Condition 4 | Condition 5 | Vibration Source Replacement Point R | First Floor Measuring Point | |
| Drop weight height (cm) | 50 | 55 | 60 | 65 | 70 | R | A−P1 B−P1 C−P1 D−P1 |
| (b) | |||||||
| Test Name | Working Condition | Measuring Point Location | |||||
| Condition 1 | Condition 2 | Condition 3 | Condition 4 | Vibration Source Replacement Point R | First Floor Measuring Point | ||
| Cushion block | − | Wood block | Rubber block | Steel block | R | A−P1 B−P1 C−P1 D−P1 | |
| Maximum Acceleration in Time−Domain (mm/s2) | RMS of Acceleration in Time−Domain (mm/s2) | |
|---|---|---|
| Measured value | 10.47 | 0.97 |
| Predicted value of amplitude−RTR | 10.28 | 0.91 |
| Predicted value of RMS−RTR | 10.89 | 0.94 |
| Vehicle Speed (km/h) | The Maximum of Vibration Velocity Based on Amplitude−RTR | The Maximum of Vibration Velocity Based on RMS−RTR | ||
|---|---|---|---|---|
| East−West Direction (mm/s) | North−South Direction (mm/s) | East−West Direction (mm/s) | North−South Direction (mm/s) | |
| 30 | 0.12 | 0.30 | 0.14 | 0.31 |
| 40 | 0.23 | 0.69 | 0.27 | 0.75 |
| 50 | 0.24 | 2.03 | 0.28 | 2.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Zhang, N.; Zhang, Y.; Liu, X. Prediction of Traffic Vibration Environment of Ancient Wooden Structures Based on the Response Transfer Ratio Function. Sensors 2022, 22, 8414. https://doi.org/10.3390/s22218414
Zhang C, Zhang N, Zhang Y, Liu X. Prediction of Traffic Vibration Environment of Ancient Wooden Structures Based on the Response Transfer Ratio Function. Sensors. 2022; 22(21):8414. https://doi.org/10.3390/s22218414
Chicago/Turabian StyleZhang, Cheng, Nan Zhang, Yunshi Zhang, and Xiao Liu. 2022. "Prediction of Traffic Vibration Environment of Ancient Wooden Structures Based on the Response Transfer Ratio Function" Sensors 22, no. 21: 8414. https://doi.org/10.3390/s22218414
APA StyleZhang, C., Zhang, N., Zhang, Y., & Liu, X. (2022). Prediction of Traffic Vibration Environment of Ancient Wooden Structures Based on the Response Transfer Ratio Function. Sensors, 22(21), 8414. https://doi.org/10.3390/s22218414