
Passive Sonar Target Identification Using Multiple-Measurement Sparse Bayesian Learning


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Conventional Target Detection Method
3. Target Identification and Tracking Using MM-SBL
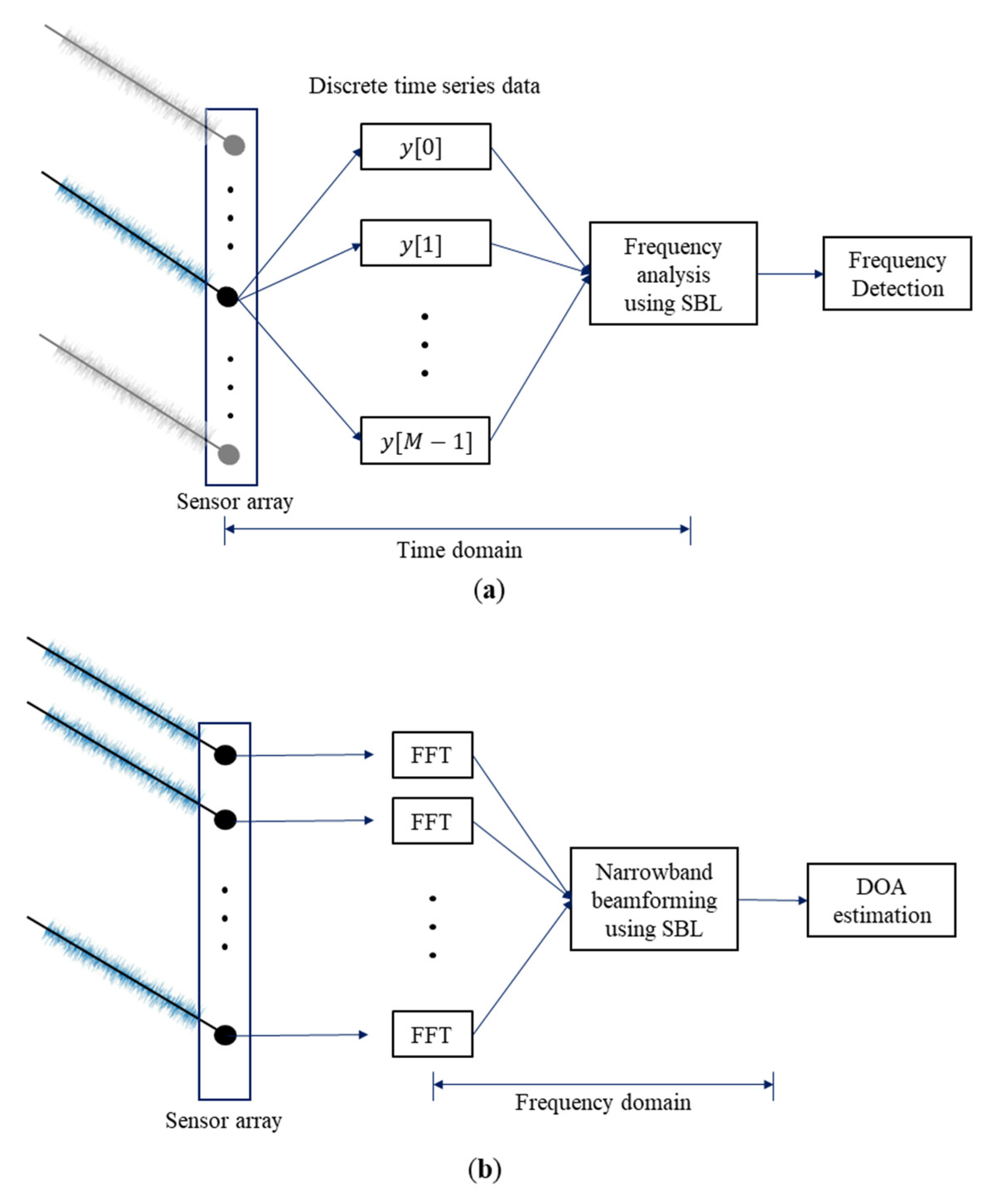
4. System Model & Theoretical Background of MM-SBL
4.1. System Model
4.2. Multiple-Measurement Sparse Bayesian Learning
5. Experimental Results Using In-Situ Underwater Acoustic Data
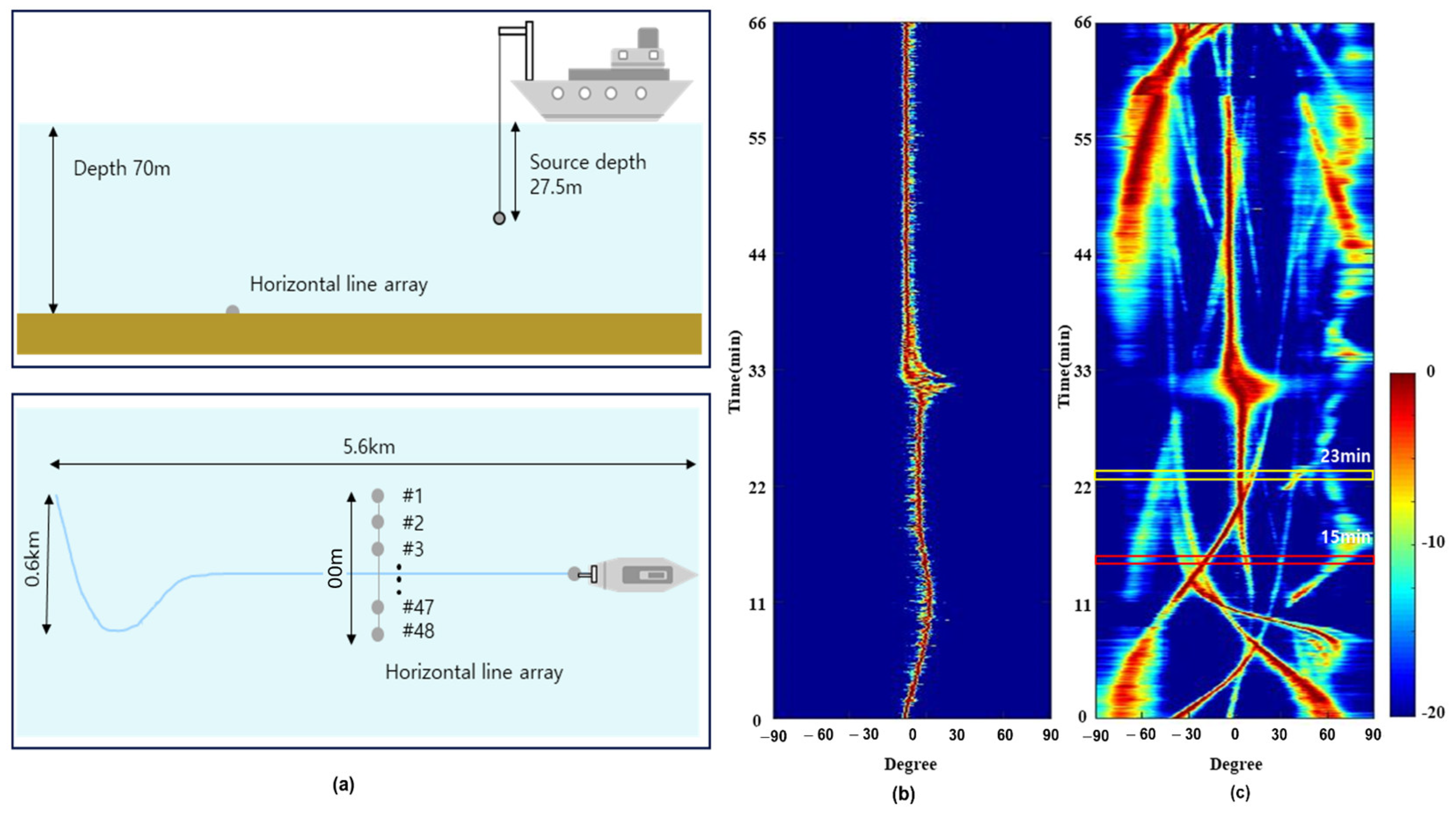
5.1. Data Description
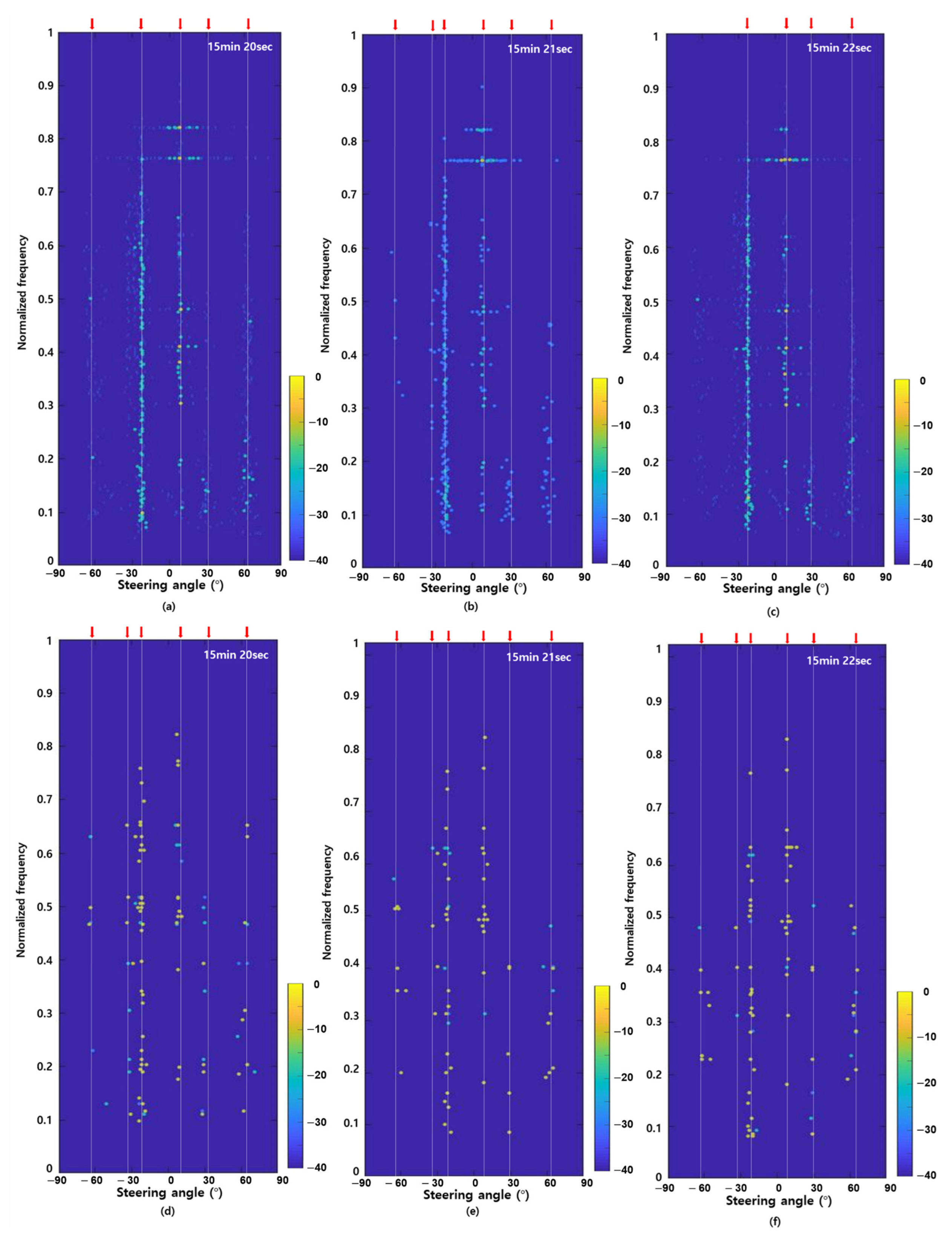
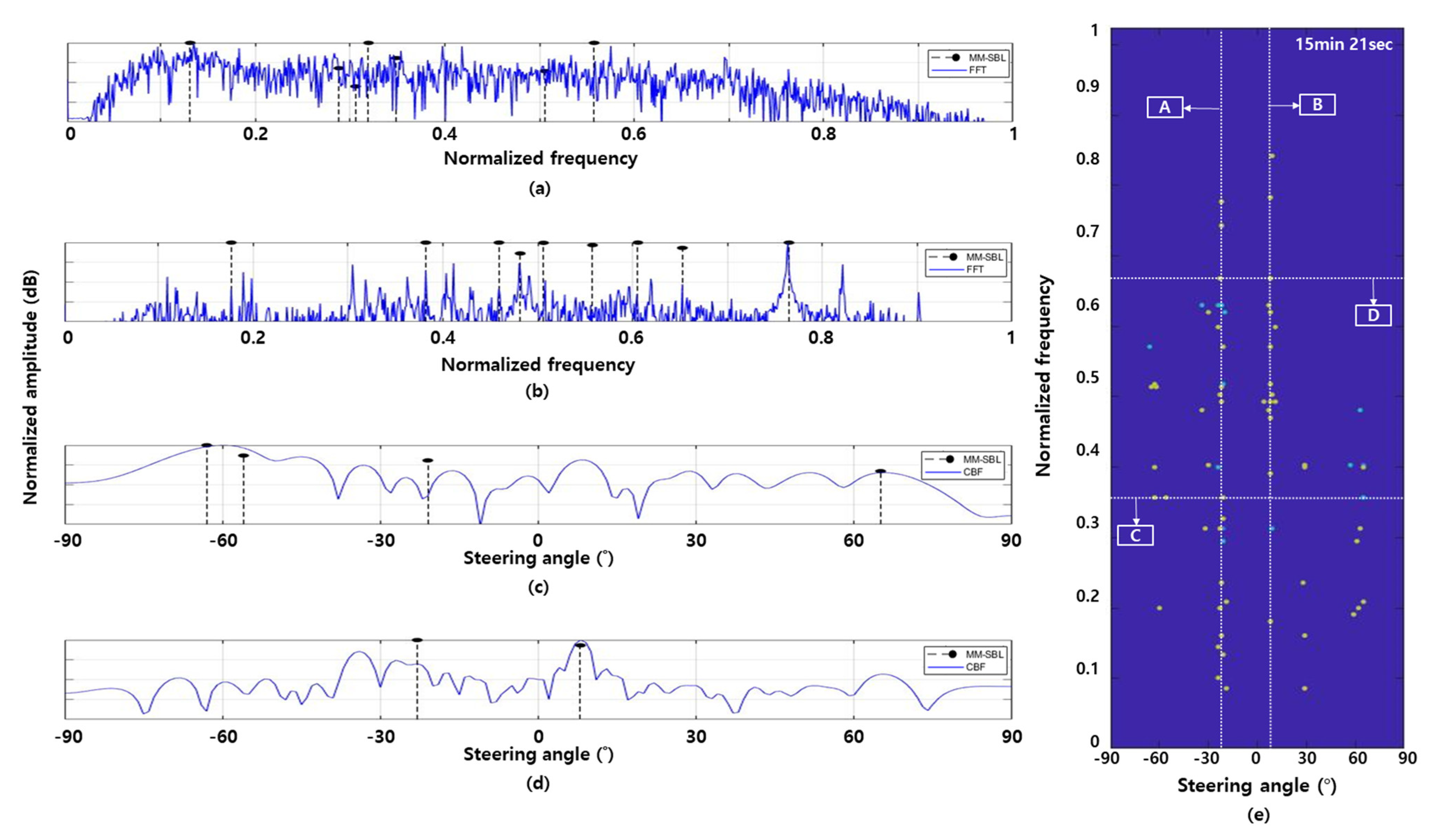
5.2. Experimental Results of Target Identification and Tracking
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abraham, D.A. Underwater Acoustic Signal Processing; Springer: Nature Switzerland AG, Switzerland, 2019; pp. 225–230. [Google Scholar]
- Formann, T.; Bar-shalom, Y.; Scheffe, M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE J. Ocean. Eng. 1983, 8, 173–184. [Google Scholar] [CrossRef] [Green Version]
- Cho, H.; Lim, J.; Ku, B.; Cheong, M.; Ko, H.; Hong, W. Underwater radiated signal analysis in the modulation spectrogram domain. IEICE Trans. 2015, 8, 1751–1759. [Google Scholar] [CrossRef]
- MacDonald, V.H.; Schultiess, P.M. Optimum Passive Bearing Estimation. J. Acoust. Soc. Am. 1969, 45, 37. [Google Scholar] [CrossRef]
- Zarnich, R.E. A Fresh Look at ‘Broadband’ Passive Sonar Processing. In Proceedings of the Seventh Annual ASAP ’99 Workshop, Sarasota, FL, USA, 22–23 September 1999; pp. 99–103. [Google Scholar]
- Bono, M.; Shapo, B.; McCarty, P.; Bethel, R. Subband energy detection in passive array processing. In Proceedings of the ASAP Workshop, Rotterdam, The Netherlands, 9–11 July 2001; Volume 2001, pp. 25–30. [Google Scholar]
- Gandhi, P.; Kassam, S. Analysis of CFAR processor non-homogeneous backgrounds. IEEE Trans. Aerosp. Electron. Syst. 1998, 24, 427–445. [Google Scholar] [CrossRef]
- Baggeroer, A.B.; Cox, H. Passive sonar limits upon nulling multiple moving ships with large aperture array. In Proceedings of the 33rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 24–27 October 1999; Volume 1, pp. 103–108. [Google Scholar]
- Blake, S. OS-CFAR theory for multiple targets and nonuniform clutter. IEEE Trans. Aerosp. Electron. Syst. 1998, 24, 785–790. [Google Scholar] [CrossRef]
- Huang, Z.; Xu, J.; Gong, Z.; Wang, H.; Yan, Y. Source localization using deep neural networks in a shallow water environment. J. Acoust. Soc. Am. 2018, 143, 2922–2932. [Google Scholar] [CrossRef]
- Wang, Y.; Peng, H. Underwater acoustic source localization using generalized regression neural network. J. Acoust. Soc. Am. 2018, 143, 2321–2331. [Google Scholar] [CrossRef]
- An, S.; Sohel, F.A.; Boussaid, F.; Hovey, R.; Kendrick, G.A.; Fisher, R.B. Deep image representations for coral image classification. IEEE J. Ocean. Eng. 2018, 44, 121–131. [Google Scholar]
- Niu, H.; Gong, Z.; Ozanich, E.; Gerstoft, P.; Wang, H.; Li, Z. Deep-learning source localization using multi-frequency magnitude-only data. J. Acoust. Soc. Am. 2019, 146, 211–222. [Google Scholar] [CrossRef] [Green Version]
- Yoon, S.; Yang, H.; Seong, W. Deep learning-based high-frequency source depth estimation using a single sensor. J. Acoust. Soc. Am. 2021, 149, 1454–1465. [Google Scholar] [CrossRef]
- Park, J.; Jung, D.J. Deep convolutional Neural Network Architectures for Tonal Frequency Identification in a Lofargram. Ini. J. Control Autom. Syst. 2021, 19, 1103–1112. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, H.; Wang, B. DOA estimation based on CNN for underwater acoustic array. Appl. Acoust. 2021, 172, 107594. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- Yang, H.; Lee, K.; Choo, Y.; Kim, K. Underwater acoustic research trends with machine learning general background. J. Ocean. Eng. Tech. 2020, 34, 147–154. [Google Scholar] [CrossRef]
- Candes, E.; Romberg, J.; Tao, T. Robust uncertainty principle: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inform. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D. Compressed sensing. IEEE Trans. Inform. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Duarte, M.E.; Baraniuk, R.G. Spectral compressive sensing. Appl. Comput. Harmon. Anal. 2013, 35, 111–129. [Google Scholar] [CrossRef]
- Bhaskar, B.N.; Tang, G. Atomic norm denoising with applications to line spectral estimation. IEEE Trans. Signal Process. 2013, 61, 5987–5999. [Google Scholar] [CrossRef] [Green Version]
- Xenaki, A.; Gerstoft, P.; Mosegaard, K. Compressive beamforming. J. Acoust. Soc. Am. 2014, 136, 260–271. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Chi, Y. Off-the-grid line spectrum denoising and estimation with multiple measurement vectors. IEEE Trans. Signal Process. 2015, 64, 1257–1269. [Google Scholar] [CrossRef] [Green Version]
- Fang, J.; Wang, F.; Shen, Y.; Li, H.; Blum, R. Super-resolution compressed sensing for line spectral estimation. IEEE Trans. Signal Process. 2016, 64, 4649–4662. [Google Scholar] [CrossRef]
- Choo, Y.; Seong, W. Compressive spherical beamforming for localization of incipient tip vortex cavitation. J. Acoust. Soc. Am. 2016, 140, 4085–4090. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian Learning and Relevance Vector Machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Gerstoft, P.; Mecklenbrauker, C.F.; Xwnaki, A.; Nannuru, S. Multisnapshot Sparse Bayesian Learning for DOA. IEEE Signal Process. Lett. 2016, 23, 1469–1473. [Google Scholar] [CrossRef] [Green Version]
- Nannuru, S.; Koochakzadeh, A.; Gemba, K.L.; Pal, P.; Gerstoft, P. Sparse Bayesian learning for beamforming using sparse linear arrays. J. Acoust. Soc. Am. 2018, 144, 2719–2729. [Google Scholar] [CrossRef]
- Park, Y.; Meyer, F.; Gerstoft, P. Sequential sparse Bayesian learning for time-varying direction of arrival. J. Acoust. Soc. Am. 2021, 149, 2089. [Google Scholar] [CrossRef] [PubMed]
- Xenaki, A.; Boldt, J.B.; Christensen, M.G. Sound source localization and speech enhancement with sparse Bayesian learning beamforming. J Acoust. Soc. Am. 2018, 143, 3912–3921. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ping, G.; Grande, E.F.; Gerstoft, P.; Chu, Z. Three-dimensional source localization using sparse Bayesian learning on spherical microphone array. J Acoust. Soc. Am. 2019, 147, 3895–3904. [Google Scholar] [CrossRef] [PubMed]
- Niu, H.; Gerstoft, P.; Pzanich, E.; Li, Z.; Zhang, R.; Gong, Z.; Wang, H. Block sparse Bayesian learning for broadband mode extraction in shallow water from a vertical array. J. Acoust. Soc. Am. 2020, 147, 3729–3739. [Google Scholar] [CrossRef]
- Shin., M.; Hong, W.; Lee, K.; Choo, Y. Frequency Analysis of Acoustic Data Using Multiple-Measurement Sparse Bayesian Learning. Sensors 2021, 21, 5827. [Google Scholar] [CrossRef]
- Stoica, P.; Nehorai, A. On the concentrated stochastic likelihood function in array processing. Circuits Syst. Signal Process. 1995, 14, 669–674. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, M.; Hong, W.; Lee, K.; Choo, Y. Passive Sonar Target Identification Using Multiple-Measurement Sparse Bayesian Learning. Sensors 2022, 22, 8511. https://doi.org/10.3390/s22218511
Shin M, Hong W, Lee K, Choo Y. Passive Sonar Target Identification Using Multiple-Measurement Sparse Bayesian Learning. Sensors. 2022; 22(21):8511. https://doi.org/10.3390/s22218511
Chicago/Turabian StyleShin, Myoungin, Wooyoung Hong, Keunhwa Lee, and Youngmin Choo. 2022. "Passive Sonar Target Identification Using Multiple-Measurement Sparse Bayesian Learning" Sensors 22, no. 21: 8511. https://doi.org/10.3390/s22218511
APA StyleShin, M., Hong, W., Lee, K., & Choo, Y. (2022). Passive Sonar Target Identification Using Multiple-Measurement Sparse Bayesian Learning. Sensors, 22(21), 8511. https://doi.org/10.3390/s22218511