

Recognition of Targets in SAR Images Based on a WVV Feature Using a Subset of Scattering Centers



Abstract
:1. Introduction
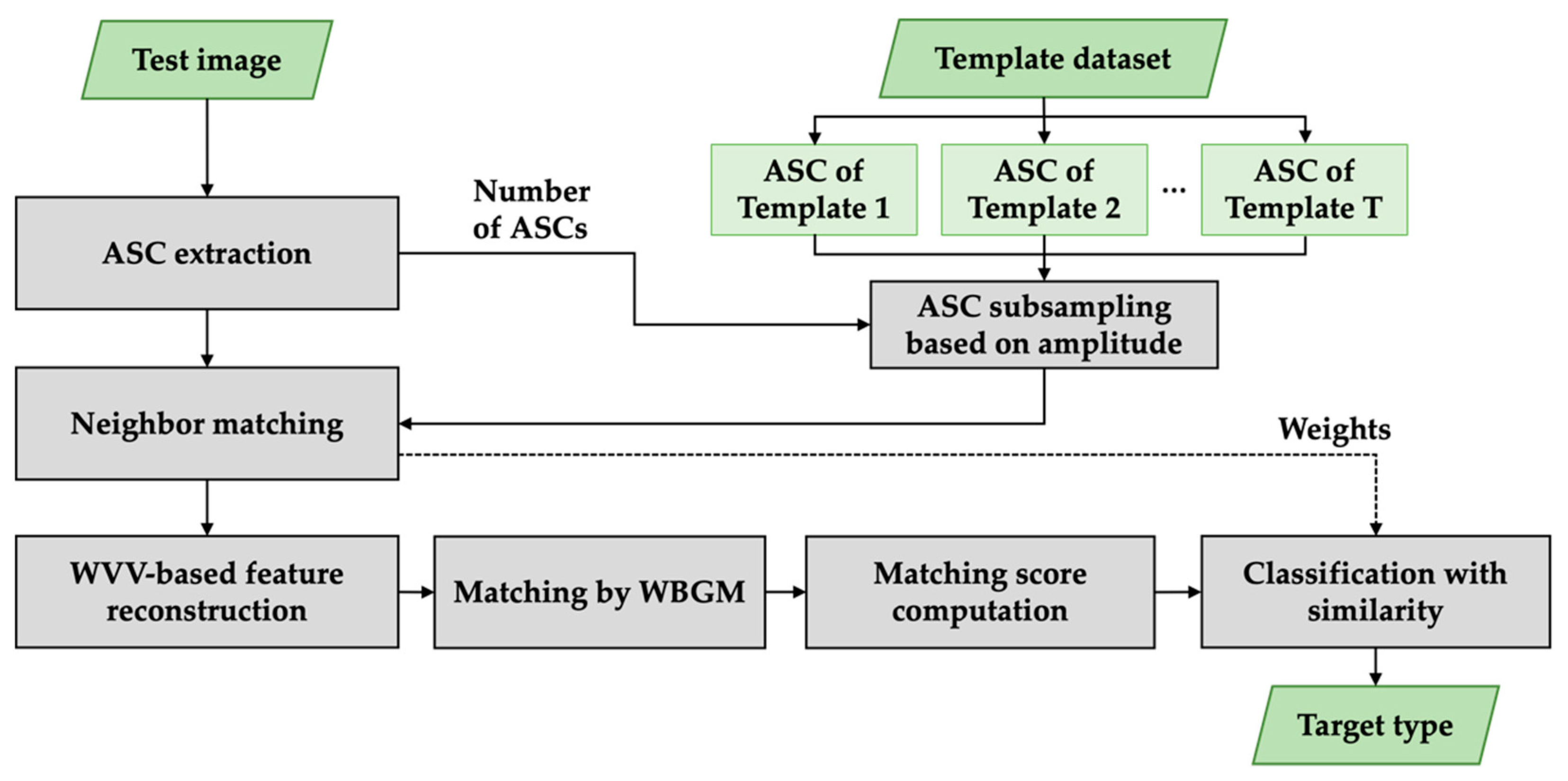
2. Target Classification with a WVV-Based Feature Set
2.1. Extraction of Scattering Centers
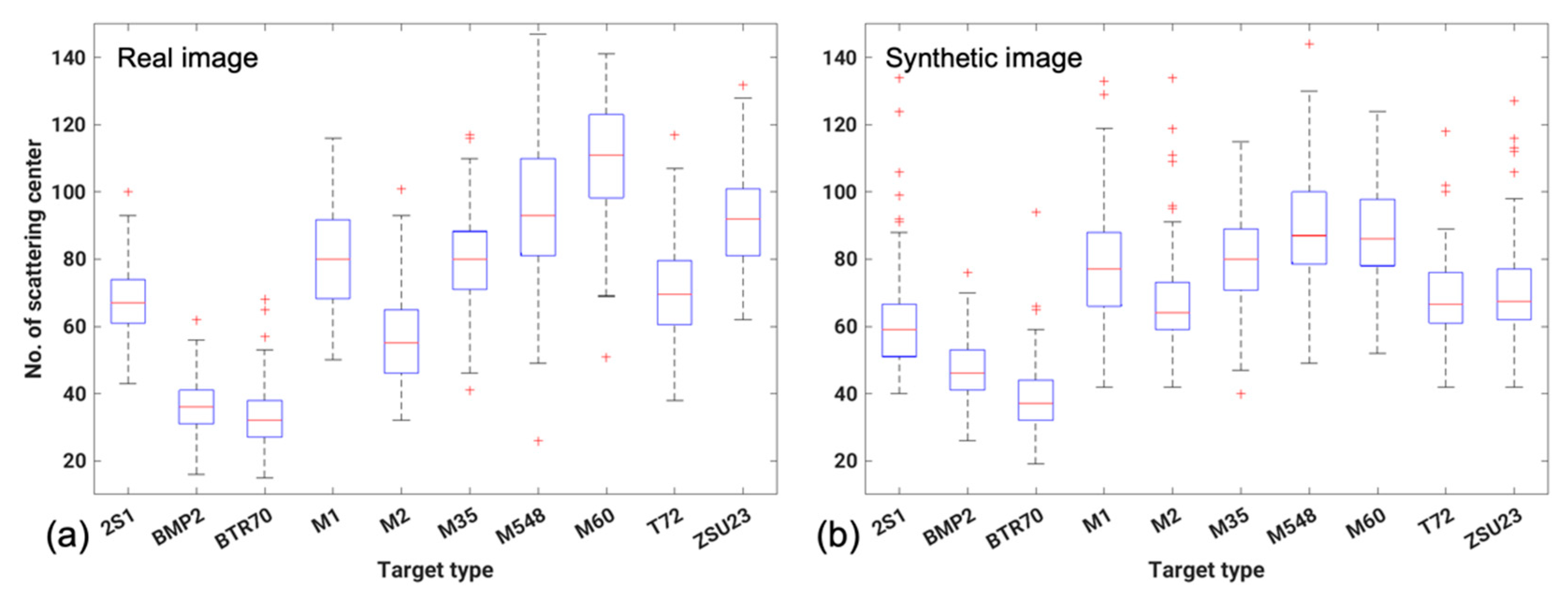
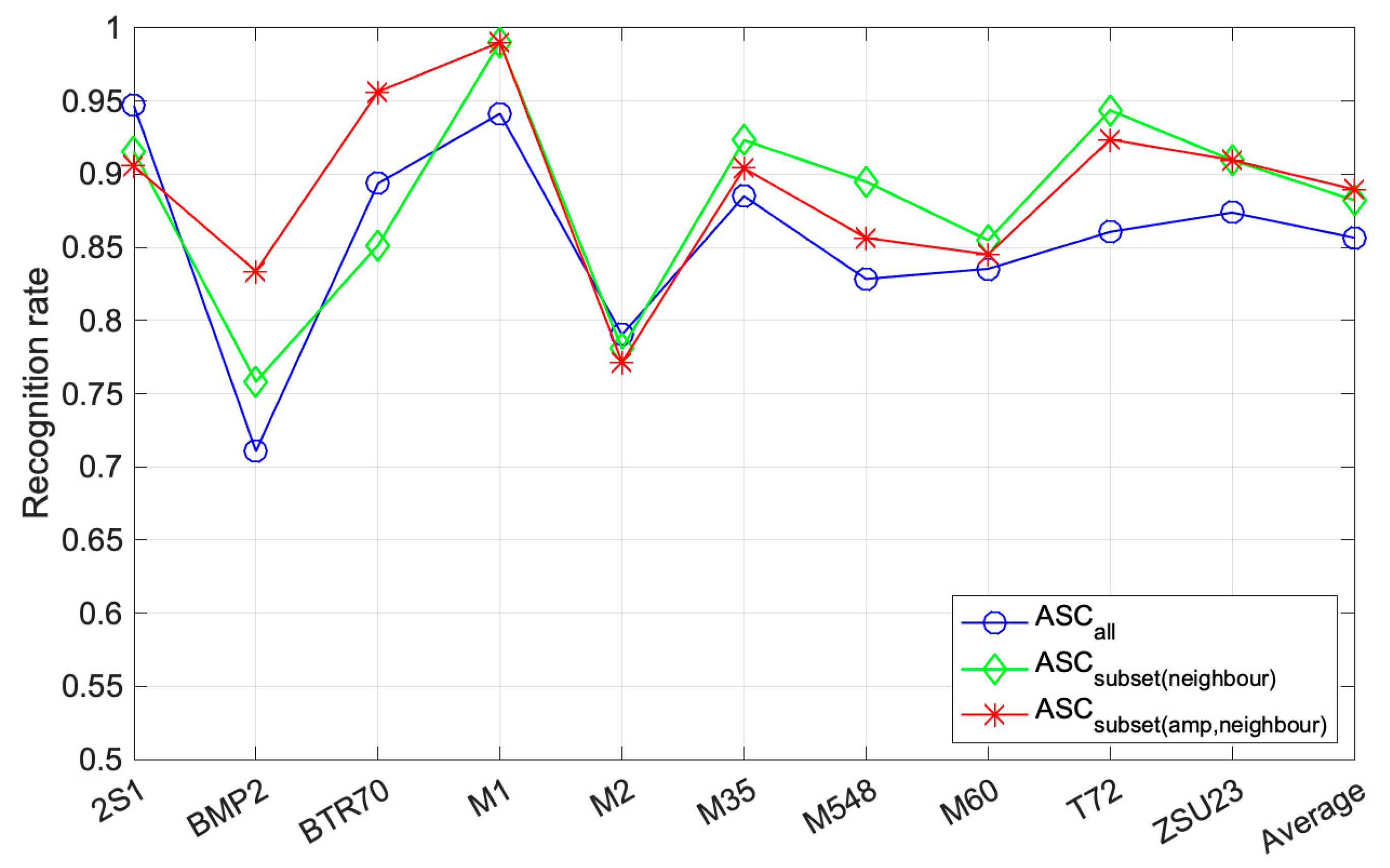
2.2. Amplitude-Based Selection
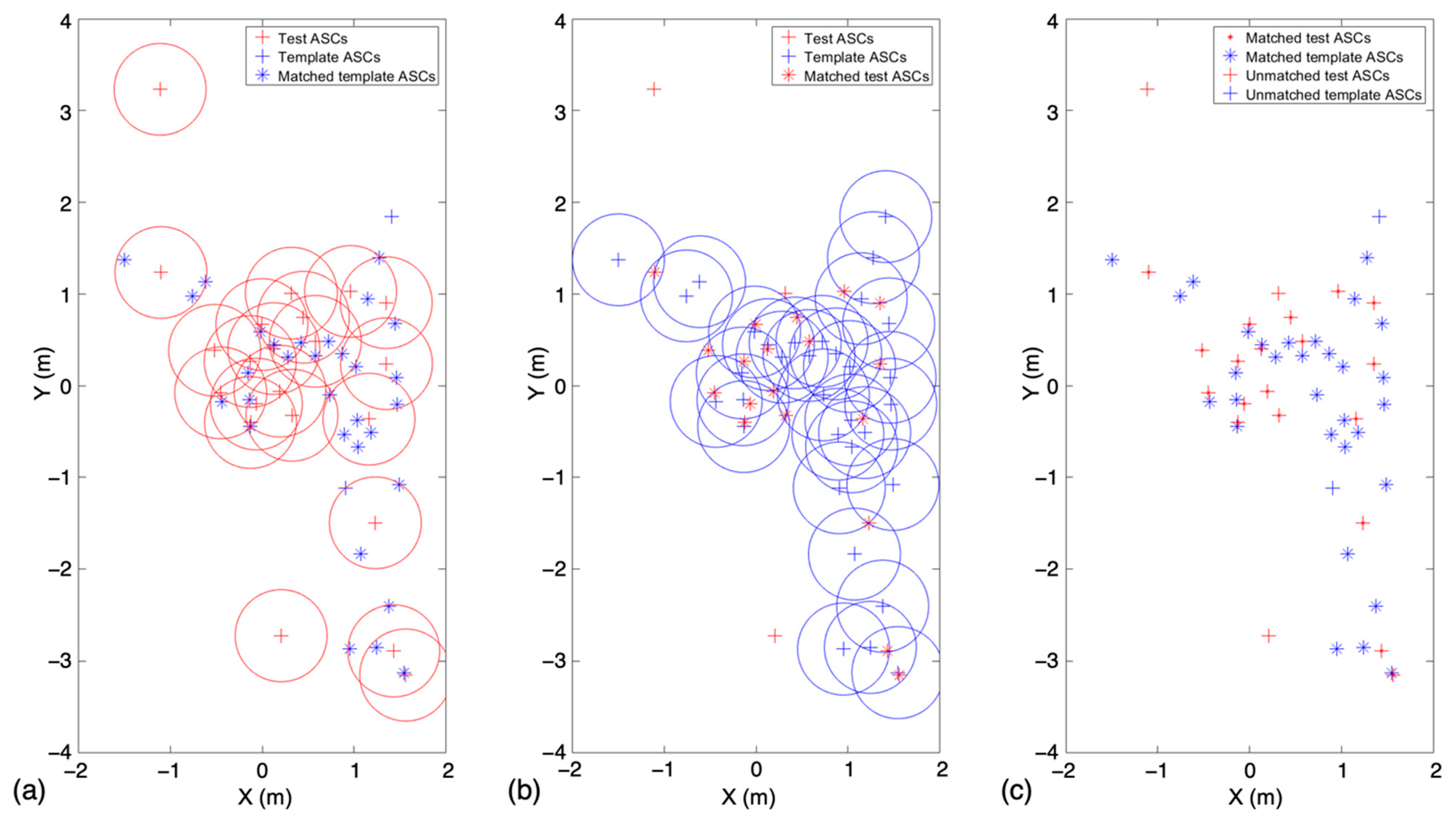
2.3. Neighbor Matching
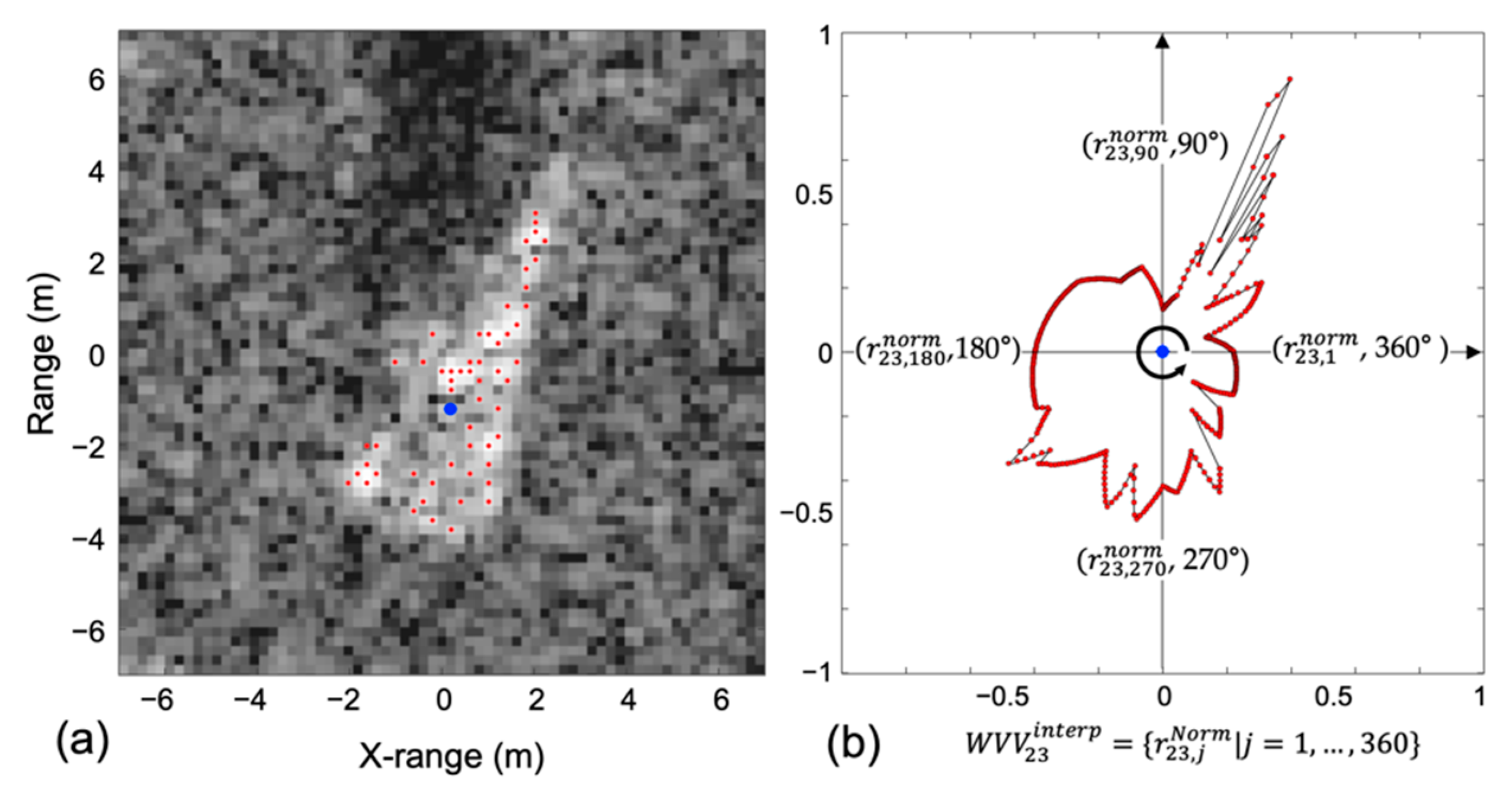
2.4. WVV-Based Feature Reconstruction
| Algorithm 1: WVV-based scattering center feature reconstruction |
| Input: Scattering center feature set . For i = 1:N 1. Establish a polar coordinate system with the origin at th point. 2. Compute the polar radii and the polar angles of the rest points. 3. Sort the polar radii corresponding to their polar angles and define th as . 4. Interpolate linearly the polar radii. 5. Construct the interpolated WVV, which consists of . 6. Normalize the by the maximum element, . {|j = 1, …, 360}. End |
| Output: WVV-based feature set, |
2.5. Similarity Calculation
2.5.1. Matching Score
2.5.2. Weight Design
3. Experiments
3.1. Experimental Settings
3.2. Standard Operating Condition
3.3. Occlusion and Random Missed Pixels
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, L.; Bai, X.; Zhou, F. SAR ATR of ground vehicles based on ESENet. Remote Sens. 2019, 11, 1316. [Google Scholar] [CrossRef] [Green Version]
- Brusch, S.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; van Schie, B. Ship surveillance with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2010, 49, 1092–1103. [Google Scholar] [CrossRef]
- Song, D.; Zhen, Z.; Wang, B.; Li, X.; Gao, L.; Wang, N.; Xie, T.; Zhang, T. A novel marine oil spillage identification scheme based on convolution neural network feature extraction from fully polarimetric SAR imagery. IEEE Access 2020, 8, 59801–59820. [Google Scholar] [CrossRef]
- Fu, K.; Dou, F.-Z.; Li, H.-C.; Diao, W.-H.; Sun, X.; Xu, G.-L. Aircraft recognition in SAR images based on scattering structure feature and template matching. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4206–4217. [Google Scholar] [CrossRef]
- El-Darymli, K.; Gill, E.W.; Mcguire, P.; Power, D.; Moloney, C. Automatic target recognition in synthetic aperture radar imagery: A state-of-the-art review. IEEE Access 2016, 4, 6014–6058. [Google Scholar] [CrossRef] [Green Version]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Park, J.-H.; Seo, S.-M.; Yoo, J.-H. SAR ATR for limited training data using DS-AE network. Sensors 2021, 21, 4538. [Google Scholar] [CrossRef]
- Paulson, C.; Nolan, A.; Goley, S.; Nehrbass, S.; Zelnio, E. Articulation study for SAR ATR baseline algorithm. In Algorithms for Synthetic Aperture Radar Imagery XXVI; SPIE: Bellingham, WA, USA, 2019; Volume 10987, pp. 73–89. [Google Scholar]
- Kechagias-Stamatis, O.; Aouf, N. Automatic target recognition on synthetic aperture radar imagery: A survey. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 56–81. [Google Scholar] [CrossRef]
- Dogaru, T.; Phelan, B.; Liao, D. Imaging of buried targets using UAV-based, ground penetrating, synthetic aperture radar. In Radar Sensor Technology XXIII; SPIE: Bellingham, WA, USA, 2019; Volume 11003, pp. 18–35. [Google Scholar]
- Ross, T.D.; Bradley, J.J.; Hudson, L.J.; O’connor, M.P. SAR ATR: So what’s the problem? An MSTAR perspective. In Algorithms for Synthetic Aperture Radar Imagery VI; SPIE: Bellingham, WA, USA, 1999; Volume 3721, pp. 662–672. [Google Scholar]
- Keydel, E.R.; Lee, S.W.; Moore, J.T. MSTAR extended operating conditions: A tutorial. Algorithms Synth. Aperture Radar Imag. III 1996, 2757, 228–242. [Google Scholar]
- Chen, S.; Wang, H.; Xu, F.; Jin, Y.-Q. Target classification using the deep convolutional networks for SAR images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4806–4817. [Google Scholar] [CrossRef]
- Dudgeon, D.E.; Lacoss, R.T. An Overview of Automatic Target Recognition. Linc. Lab. J. 1993, 6, 3–9. [Google Scholar]
- Liang, W.; Zhang, T.; Diao, W.; Sun, X.; Zhao, L.; Fu, K.; Wu, Y. SAR target classification based on sample spectral regularization. Remote Sens. 2020, 12, 3628. [Google Scholar] [CrossRef]
- Feng, S.; Ji, K.; Zhang, L.; Ma, X.; Kuang, G. SAR target classification based on integration of ASC parts model and deep learning algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10213–10225. [Google Scholar] [CrossRef]
- Lu, C.; Fu, X.; Lu, Y. Recognition of occluded targets in SAR images based on matching of attributed scattering centers. Remote Sens. Lett. 2021, 12, 932–943. [Google Scholar] [CrossRef]
- Potter, L.C.; Moses, R.L. Attributed scattering centers for SAR ATR. IEEE Trans. Image Process. 1997, 6, 79–91. [Google Scholar] [CrossRef] [Green Version]
- Fan, J.; Tomas, A. Target Reconstruction Based on Attributed Scattering Centers with Application to Robust SAR ATR. Remote Sens. 2018, 10, 655. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wang, L.; Wen, Z.; Li, K.; Pan, Q. Multi-Level Scattering Center and Deep Feature Fusion Learning Framework for SAR Target Recognition. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5227914. [Google Scholar]
- Ding, B.; Wen, G.; Ma, C.; Yang, X. An efficient and robust framework for SAR target recognition by hierarchically fusing global and local features. IEEE Trans. Image Process. 2018, 27, 5983–5995. [Google Scholar] [CrossRef]
- Lv, J.; Liu, Y. Data augmentation based on attributed scattering centers to train robust CNN for SAR ATR. IEEE Access 2019, 7, 25459–25473. [Google Scholar] [CrossRef]
- Feng, S.; Ji, K.; Wang, F.; Zhang, L.; Ma, X.; Kuang, G. Electromagnetic Scattering Feature (ESF) Module Embedded Network Based on ASC Model for Robust and Interpretable SAR ATR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5235415. [Google Scholar] [CrossRef]
- Ding, B.; Wen, G.; Zhong, J.; Ma, C.; Yang, X. Robust method for the matching of attributed scattering centers with application to synthetic aperture radar automatic target recognition. J. Appl. Remote Sens. 2016, 10, 016010. [Google Scholar] [CrossRef]
- Lewis, B.; DeGuchy, O.; Sebastian, J.; Kaminski, J. Realistic SAR data augmentation using machine learning techniques. In Algorithms for Synthetic Aperture Radar Imagery XXVI; SPIE: Bellingham, WA, USA, 2019; Volume 10987, pp. 12–28. [Google Scholar]
- Tian, S.; Yin, K.; Wang, C.; Zhang, H. An SAR ATR method based on scattering centre feature and bipartite graph matching. IETE Tech. Rev. 2015, 32, 364–375. [Google Scholar] [CrossRef]
- Ding, B.; Wen, G. Target reconstruction based on 3-D scattering center model for robust SAR ATR. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3772–3785. [Google Scholar] [CrossRef]
- Diemunsch, J.R.; Wissinger, J. Moving and stationary target acquisition and recognition (MSTAR) model-based automatic target recognition: Search technology for a robust ATR. In Algorithms for synthetic aperture radar Imagery V; SPIE: Bellingham, WA, USA, 1998; Volume 3370, pp. 481–492. [Google Scholar]
- Camus, B.; Barbu, C.L.; Monteux, E. Robust SAR ATR on MSTAR with Deep Learning Models trained on Full Synthetic MOCEM data. arXiv 2022, arXiv:2206.07352. [Google Scholar]
- Vernetti, A.; Scarnati, T.; Mulligan, M.; Paulson, C.; Vela, R. Target Pose Estimation using Fused Radio Frequency Data within Ensembled Neural Networks. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar]
- Lewis, B.; Scarnati, T.; Sudkamp, E.; Nehrbass, J.; Rosencrantz, S.; Zelnio, E. A SAR dataset for ATR development: The Synthetic and Measured Paired Labeled Experiment (SAMPLE). In Algorithms for Synthetic Aperture Radar Imagery XXVI; SPIE: Bellingham, WA, USA, 2019; Volume 10987, pp. 39–54. [Google Scholar]
- Arnold, J.M.; Moore, L.J.; Zelnio, E.G. Blending synthetic and measured data using transfer learning for synthetic aperture radar (SAR) target classification. In Algorithms for Synthetic Aperture Radar Imagery XXV; SPIE: Bellingham, WA, USA, 2018; Volume 10647, pp. 48–57. [Google Scholar]
- Inkawhich, N.; Inkawhich, M.J.; Davis, E.K.; Majumder, U.K.; Tripp, E.; Capraro, C.; Chen, Y. Bridging a gap in SAR-ATR: Training on fully synthetic and testing on measured data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2942–2955. [Google Scholar] [CrossRef]
- Bhanu, B.; Jones, G. Target recognition for articulated and occluded objects in synthetic aperture radar imagery. In Proceedings of the Proceedings of the 1998 IEEE Radar Conference, RADARCON’98. Challenges in Radar Systems and Solutions (Cat. No.98CH36197), Dallas, TX, USA, 14 May 1998; pp. 245–250. [Google Scholar]
- Murtagh, F. A new approach to point pattern matching. Publ. Astron. Soc. Pac. 1992, 104, 301. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, D.; Xu, S.; Liu, J.; Liu, Y. Guide Local Feature Matching by Overlap Estimation. arXiv 2022, arXiv:2202.09050. [Google Scholar] [CrossRef]
- Sarlin, P.-E.; DeTone, D.; Malisiewicz, T.; Rabinovich, A. Superglue: Learning feature matching with graph neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 4938–4947. [Google Scholar]
- Yun, D.-J.; Lee, J.-I.; Bae, K.-U.; Song, W.-Y.; Myung, N.-H. Accurate Three-Dimensional Scattering Center Extraction for ISAR Image Using the Matched Filter-Based CLEAN Algorithm. IEICE Trans. Commun. 2018, 101, 418–425. [Google Scholar] [CrossRef]
- Araujo, G.F.; Machado, R.; Pettersson, M.I. Non-Cooperative SAR Automatic Target Recognition Based on Scattering Centers Models. Sensors 2022, 22, 1293. [Google Scholar] [CrossRef]
- Högbom, J. Aperture synthesis with a non-regular distribution of interferometer baselines. Astron. Astrophys. Suppl. Ser. 1974, 15, 417. [Google Scholar]
- Ding, B.; Wen, G. Combination of global and local filters for robust SAR target recognition under various extended operating conditions. Inf. Sci. 2019, 476, 48–63. [Google Scholar] [CrossRef]
- Ding, B.; Wen, G.; Zhong, J.; Ma, C.; Yang, X. A robust similarity measure for attributed scattering center sets with application to SAR ATR. Neurocomputing 2017, 219, 130–143. [Google Scholar] [CrossRef]
- Tang, T.; Su, Y. Object recognition based on feature matching of scattering centers in SAR imagery. In Proceedings of the 2012 5th International Congress on Image and Signal Processing, Chongqing, China, 16–18 October 2012; pp. 1073–1076. [Google Scholar]
- Ozdemir, C. Inverse Synthetic Aperture Radar Imaging with MATLAB Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Demirkaya, O.; Asyali, M.H.; Sahoo, P.K. Image Processing with MATLAB: Applications in Medicine and Biology; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Novak, L.M.; Owirka, G.J.; Brower, W.S. Performance of 10-and 20-target MSE classifiers. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1279–1289. [Google Scholar]
- Karine, A.; Toumi, A.; Khenchaf, A.; El Hassouni, M. Radar target recognition using salient keypoint descriptors and multitask sparse representation. Remote Sens. 2018, 10, 843. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Zhou, G.; Zhou, S.; Yin, J. A Lightweight Fully Convolutional Neural Network for SAR Automatic Target Recognition. Remote Sens. 2021, 13, 3029. [Google Scholar] [CrossRef]
- Gao, F.; Huang, T.; Sun, J.; Wang, J.; Hussain, A.; Yang, E. A new algorithm for SAR image target recognition based on an improved deep convolutional neural network. Cogn. Comput. 2019, 11, 809–824. [Google Scholar] [CrossRef]
- Choi, Y. Simulated SAR Target Recognition using Image-to-Image Translation Based on Complex-Valued CycleGAN. J. Korean Inst. Inf. Technol. 2022, 20, 19–28. [Google Scholar]
- Inkawhich, N.A.; Davis, E.K.; Inkawhich, M.J.; Majumder, U.K.; Chen, Y. Training SAR-ATR models for reliable operation in open-world environments. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3954–3966. [Google Scholar] [CrossRef]
- Sellers, S.R.; Collins, P.J.; Jackson, J.A. Augmenting simulations for SAR ATR neural network training. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 309–314. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | 2S1 | BMP2 | BTR70 | M1 | M2 | M35 | M60 | M548 | T72 | ZSU23 |
|---|---|---|---|---|---|---|---|---|---|---|
| Test set (real 16°) Train set (syn 16°) | 50 | 55 | 43 | 52 | 52 | 52 | 52 | 51 | 56 | 50 |
| Test set (real 17°) Train set (syn 17°) | 58 | 52 | 49 | 51 | 53 | 53 | 53 | 60 | 52 | 58 |
| Type | 2S1 | BMP2 | BTR70 | M1 | M2 | M35 | M548 | M60 | T72 | ZSU23 | PCC (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 2S1 | 54 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 2 | 93.10 |
| BMP2 | 4 | 47 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 90.38 |
| BTR70 | 2 | 0 | 47 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 95.92 |
| M1 | 0 | 0 | 0 | 50 | 1 | 0 | 0 | 0 | 0 | 0 | 98.04 |
| M2 | 4 | 4 | 0 | 0 | 41 | 0 | 0 | 0 | 1 | 3 | 77.36 |
| M35 | 0 | 0 | 0 | 0 | 0 | 52 | 1 | 0 | 0 | 0 | 98.11 |
| M548 | 0 | 0 | 0 | 0 | 0 | 3 | 49 | 0 | 0 | 1 | 92.45 |
| M60 | 3 | 0 | 0 | 4 | 0 | 0 | 0 | 52 | 1 | 0 | 86.67 |
| T72 | 1 | 3 | 0 | 0 | 1 | 0 | 0 | 2 | 45 | 0 | 86.54 |
| ZSU23 | 6 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 51 | 87.93 |
| Average | 90.65 |
| Type | 2S1 | BMP2 | BTR70 | M1 | M2 | M35 | M548 | M60 | T72 | ZSU23 | PCC (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 2S1 | 44 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 88.00 |
| BMP2 | 10 | 42 | 1 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 76.36 |
| BTR70 | 0 | 0 | 41 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 95.35 |
| M1 | 0 | 0 | 0 | 52 | 0 | 0 | 0 | 0 | 0 | 0 | 100.00 |
| M2 | 4 | 3 | 0 | 0 | 40 | 0 | 0 | 0 | 1 | 4 | 76.92 |
| M35 | 0 | 0 | 7 | 0 | 0 | 43 | 0 | 0 | 0 | 2 | 82.69 |
| M548 | 0 | 0 | 7 | 0 | 0 | 2 | 41 | 0 | 0 | 2 | 78.85 |
| M60 | 3 | 0 | 0 | 5 | 0 | 0 | 0 | 42 | 1 | 0 | 82.35 |
| T72 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 55 | 0 | 98.21 |
| ZSU23 | 2 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 47 | 94.00 |
| Average | 87.27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Kim, S.-W. Recognition of Targets in SAR Images Based on a WVV Feature Using a Subset of Scattering Centers. Sensors 2022, 22, 8528. https://doi.org/10.3390/s22218528
Lee S, Kim S-W. Recognition of Targets in SAR Images Based on a WVV Feature Using a Subset of Scattering Centers. Sensors. 2022; 22(21):8528. https://doi.org/10.3390/s22218528
Chicago/Turabian StyleLee, Sumi, and Sang-Wan Kim. 2022. "Recognition of Targets in SAR Images Based on a WVV Feature Using a Subset of Scattering Centers" Sensors 22, no. 21: 8528. https://doi.org/10.3390/s22218528
APA StyleLee, S., & Kim, S. -W. (2022). Recognition of Targets in SAR Images Based on a WVV Feature Using a Subset of Scattering Centers. Sensors, 22(21), 8528. https://doi.org/10.3390/s22218528