1. Introduction
The acquisition of hydraulic values is of great significance for exploring liquid environments such as oceans, dams and oil wells, etc. At present, the mainstream approach to measuring liquid pressures is through electrical sensors [
1,
2,
3]. However, electrical sensors have limited applications in some liquid environments, because of the effect of electromagnetic interference, difficult signal transmission and safety hazards [
4,
5]. The fiber-optic sensor is an optical passive element, which has incomparable advantages over electrical counterparts in complicated liquid environment [
6,
7]. Firstly, fiber-optic probes are flexible, small in diameter and resistant to water and corrosion, which can greatly enhance their lifetime and lessens ecological damage. Secondly, light is used as the signal element inside the fiber (e.g., silica) which is immune to electromagnetic interference, so this is suitable for operation in harsh conditions. Such merits enable fiber-optic liquid pressure sensors to replace electrical sensor in certain situations.
In recent years, the reports on the fiber-optic hydraulic sensing technology mainly included the Michelson interferometer (MI) [
8], Fabry–Perot interferometer (FPI) [
9] and fiber Bragg grating (FBG), etc. Compared with other structures, the MI-based sensors and the FPI-based sensors are more measurement-sensitive to liquid pressure, but they have some drawbacks, such as narrow measurement range and high requirements for the intensity and stability of the light source and their fragile structures. These make them mainly applicable to micro pressure measurement [
10]. Literature on FBG hydraulic-sensing technology has been reported as early as 1993 [
11]. Although the measurement sensitivity of the FBG is lower than the MI or FPI, it possesses stable performance, low requirements for light source specifications, simple signal demodulation, low cost, quasi distributed measurement, better resolution and a wide measuring range [
12,
13]. These make the FBG-based sensors more applicable in practical usages. Most researchers have begun to integrate the FBG with mechanical structures or chemical materials, hoping to fabricate a practical FBG-based liquid pressure sensor with higher measurement sensitivity and ultra-durable structure [
14,
15].
In 2020, Mingyao Liu et al. [
16] reported an immersion liquid pressure sensor, which was mainly made by encapsulating the FBG with the epoxy resin in a specific metal shell; the measurement sensitivity was about 0.0513 nm/MPa within the liquid pressure range of 0–15.5 MPa. That structure offered a wide measurement range but was less sensitive, which greatly increased the cost of signal demodulation. In 2021, Schenato, Luca et al. [
17] fabricated a new FBG-based liquid pressure sensor by encapsulating the FBG inside an aluminum alloy waterproof sealing shell with the mechanical structure of a hexagonal pantograph. The measurement sensitivity was up to 240 nm/MPa in the liquid pressure range of 0–0.01 MPa. Although this sensor had a high sensitivity, its measuring range was narrow, and it needed to be sealed in a waterproof structure. These reasons mean it cannot be applied in some practical situations such as oceans or oil wells. Although there have been fruitful results achieved in FBG-based liquid pressure sensors up to now, the co-existence of high sensitivity and wide measuring range has not been solved. Therefore, a new designed liquid pressure sensor is proposed, by encapsulating the FBG inside the adjustable double-flange cylinder mechanical structure where the flexible material PDMS is filled. To a certain extent, the sensor can achieve high measurement sensitivity in various liquid levels by simply adjusting the structure. The static stress analysis and optimization design of the sensor structure are performed by using the COMSOL Multiphysics software. The sensors have been fabricated based on the simulation results and the performance have been verified by experiments. The rest of this paper is structured as follows: the sensor details, such as sensing principle, static stress analysis and packaging process are described in
Section 2, and the experimental details, results and discussion are given in
Section 3. Finally, conclusion is given in
Section 4.
3. Results and Discussion
As shown in
Figure 5a, the fabricated sensor (
Figure 4) was connected to an amplified spontaneous emission source (ASE) and an optical spectrum analyzer (OSA) through an optical fiber circulator. Afterwards, the sensor was placed in the water pressure analog device which can simulate the water level between 0 m and 50 m by applying pressure (from 0 MPa to 0.5 MPa). The characteristics of the sensor can be examined, such as sensitivity, linearity and stability to water pressure. In this investigation, due to the sensor being sensitive to the liquid temperature and the pressure simultaneously, the water temperature was kept at 26 °C and monitored by a thermocouple device in order to eliminate the interference of temperature during the experiments.
Figure 5b shows the experimental setup.
The performances of the sensors with 5 mm, 10 mm and 15 mm inner diameter in the measurement range of 0 m to 5 m water level were tested, respectively. At a constant water temperature of 26 °C, the water level was increased from 0 m to 5 m at steps of 0.5 m. For investigating repeatability, the sensor was subjected to three sets of pressure increment experiments. The liquid pressure testing results of the sensors are shown in
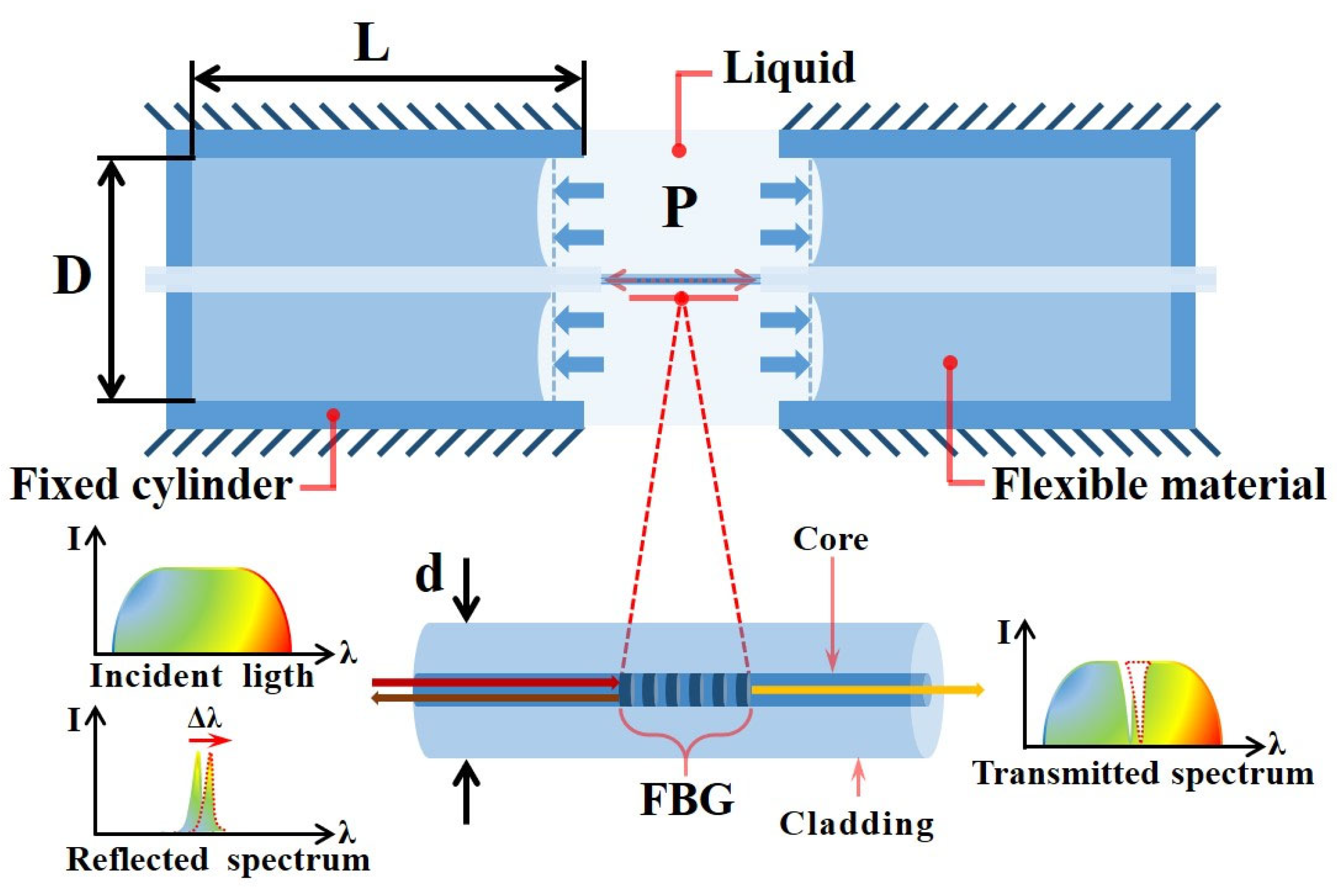
Figure 6. From the inset diagram of
Figure 6a, as the liquid pressure around the sensor increases, the reflection spectrum of the sensor output shows a red shift. Moreover, the higher the liquid pressure, the greater variation of the Bragg wavelength. It proves that the sensor can convert the external liquid pressure into the Bragg wavelength variation due to the elastic compression deformation of the PDMS inside the cylinders. The wavelengths of these offset peaks are extracted and subjected to a linear fitting, and the relationships between the wavelength drifts of the sensors and the liquid pressures are shown in
Figure 6a. From the error bar and the linear fitting outcomes, it can be observed that all these sensors have good linearity and the measurement sensitivity increases as the inner diameter of the sensor increases. The sensor with 15 mm inner diameter has the highest measurement sensitivity, about 18.651 nm/MPa, and the coefficient of fitting determination is R
2 = 0.9994.
Figure 6b shows the simulation results and experimental results of the sensor, and the sensors’ sensitivities in experiments are slightly smaller than in the simulations. The discrepancy is that the simulation results are obtained under the condition that various parameters tend to be idealized, but in the experiments, the results are often affected by the errors of the sensor parameters and the errors of the instruments. Furthermore, the measurement accuracy of the sensor is mainly evaluated by the instrument’s accuracy, such as the OSA and the water pressure analog device.
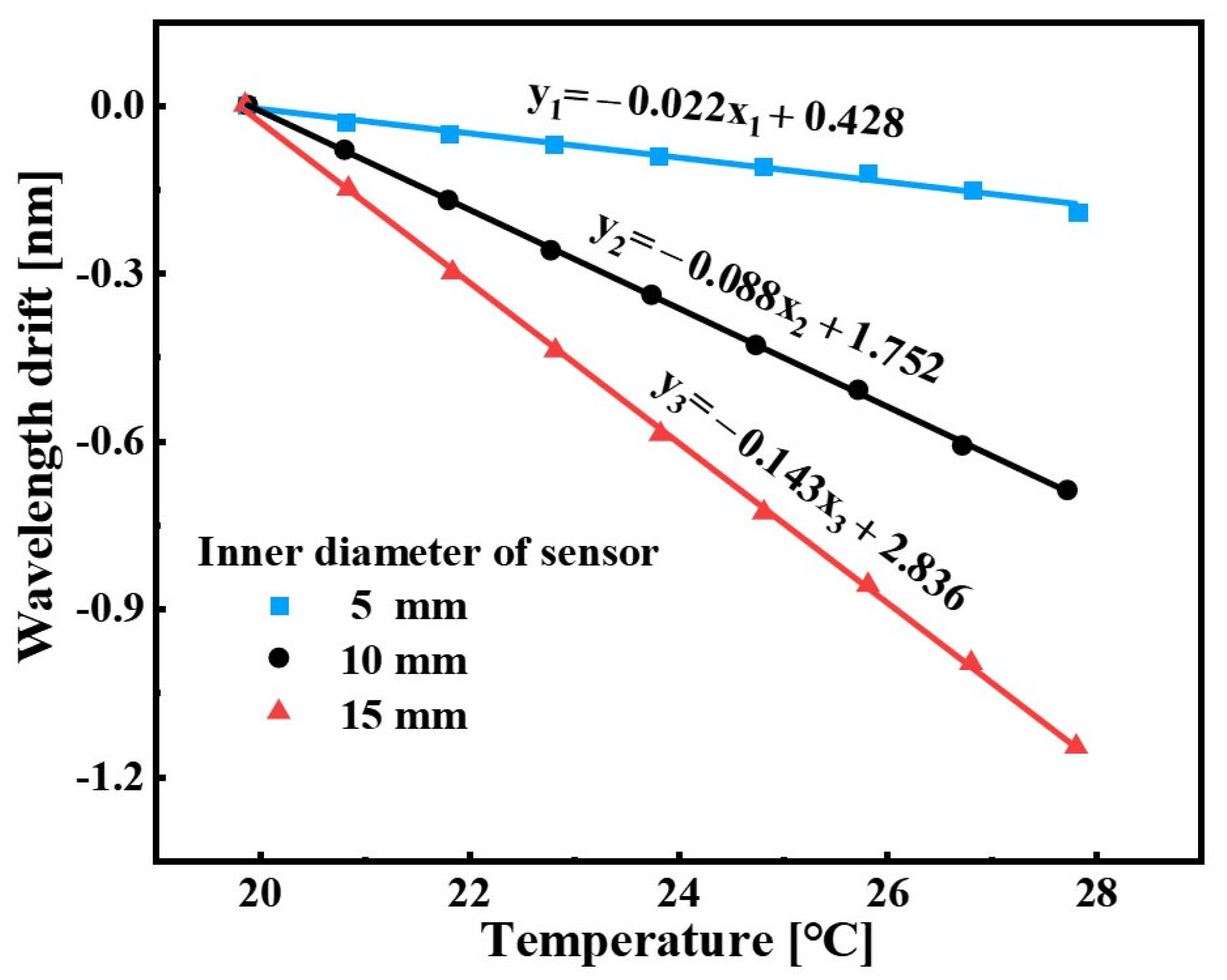
It is well known that the FBG is sensitive to both the temperature and strain. In order to guarantee the stability of the sensors in engineering applications, the temperature characteristic of the sensors was calibrated by the water-bath heating device and the thermocouple. The water temperature in the water-bath heating device was increased from 20 °C to 28 °C, continuously maintained for 10 min in each step, and monitored by the thermocouple. The linear fitting outcomes between the peak wavelength shift of the sensors and the water temperature are shown in
Figure 7. From the results, the temperature sensitivities of the sensors with 5 mm, 10 mm and 15 mm are −0.022 nm/°C, −0.088 nm/°C and −0.143 nm/°C, respectively, and the corresponding hydraulic measurement errors caused by the liquid temperature are 0.008 MPa/°C, 0.009 MPa/°C and 0.008 MPa/°C, respectively. The results after comprehensive analysis indicated that the response of the sensor to temperature was due to the thermal expansion and contraction effect of the PDMS in the flange cylinders. Although the sensors are less affected by the ambient temperature, in order to further eliminate the temperature interference, the FBG-based sensing configuration can be used to measure temperature and liquid pressure simultaneously. For example, the other FBG sensor is encapsulated inside the PDMS to form an independent temperature-sensing unit.
According to Equation (3), it is found that the theoretical sensitivities of the sensors with 5 mm, 10 mm and 15 mm inner diameters are 26.565 nm/MPa, 106.259 nm/MPa and 239.083 nm/MPa, respectively, which are each about 10 times the sensitivities of the experiments. The discrepancy is mainly due to that the PDMS cannot completely convert the liquid pressure into the in-line strain on the FBG. Firstly, the PDMS will store kinetic energy like a spring model when it is compressed and relaxed. Secondly, the PDMS colloid adheres to the inner wall of flange cylinder and has a lot of friction with the inner wall after curing, so that the longitudinal elastic deformation of the PDMS is reduced. Thirdly, there is slight slippage between the PDMS and the fiber surface because of the small contact area and the limited adhesion. Further, the limited longitudinal elastic deformation of the PDMS and the limited adhesion between the PDMS and the optical fiber surface are also the reasons for the limitation of the sensing depth.
There are several methods that can effectively improve the measurement sensitivity by modifying the structure properties, as follows. Firstly, the flexible material with stronger adhesion to the fiber surface can be used to replace the PDMS, or a waterproof curing agent with higher viscosity can be applied between the PDMS and fiber surface. Secondly, the adhesion and the friction between the polymer and inner wall of the flange cylinders need to be reduced. Thirdly, the longitudinal elastic deformation of the PDMS is increased by increasing the length of flange cylinders (), decreasing the elastic modulus of the PDMS () or forming air cavities between the PDMS and the bottom of flange cylinder through a syringe.
The simulations for investigating the effects of the
and the
on the sensor measurement sensitivity were undertaken.
Figure 8 shows the simulation results of the sensor with a 10 mm inner diameter in the case of the various
and
, respectively. From
Figure 8a, with the other parameters fixed, it can be observed that the measurement sensitivity increases as the
increases, but the improvement is limited. When
is 39 mm, the measurement sensitivity of the sensor with 10 mm inner diameter is the highest, about 11.375 nm/MPa. From
Figure 8b, with the other parameters fixed, the measurement sensitivity is negatively correlated with the
. According to the experimental results of Justin D. Glover, it is known that the elastic modulus of the PDMS decreases as the mass ratio of the base and the curing agent increases [
19]. That is, the PDMS with elastic modulus of 1.628 MPa, 0.845 MPa, 0.561 MPa and 0.351 MPa were made by the mass ratio of 10:1, 15:1, 20:1 and 25:1 (base: curing agent), respectively. Therefore, the measurement sensitivity can be improved by increasing the mass ratio of the base and the curing agent. From
Figure 8b, when the mass ratio of the base and the curing agent in the PDMS is 20:1, the sensor with 10 mm inner diameter has the highest measurement sensitivity, about 10.742 nm/MPa. In addition, it was found from the simulation results that the measurement sensitivity of the sensor with the air cavity between the PDMS and the bottom of cylinder would be greatly improved. Therefore, the measurement sensitivity can also be improved by the injection of more air cavities between the PDMS and the bottom of the flange cylinder by the syringe.
For extending the measurement range with high measurement sensitivity, the structurally adjustable FBG-based liquid pressure sensor is proposed and shown in
Figure 9. From
Figure 9a, the initial Bragg wavelength of the FBG in the sensor can be changed by simply adjusting the screw arbors.
Figure 9b shows the pre-relaxed and pre-strained state of the FBG after adjusting the screw arbor, respectively. Therefore, by adjusting the sensor structure to change the state of the FBG, the sensor can be kept at a high measurement sensitivity in various water levels. For example, when the sensor is used to measure the liquid pressure in shallow coastal water, pre-strained FBG is suitable. On the other hand, when the sensor measures the liquid pressure in deeper water levels, pre-relaxed FBG is needed.
The sensor with 10 mm inner diameter is here used as an example.
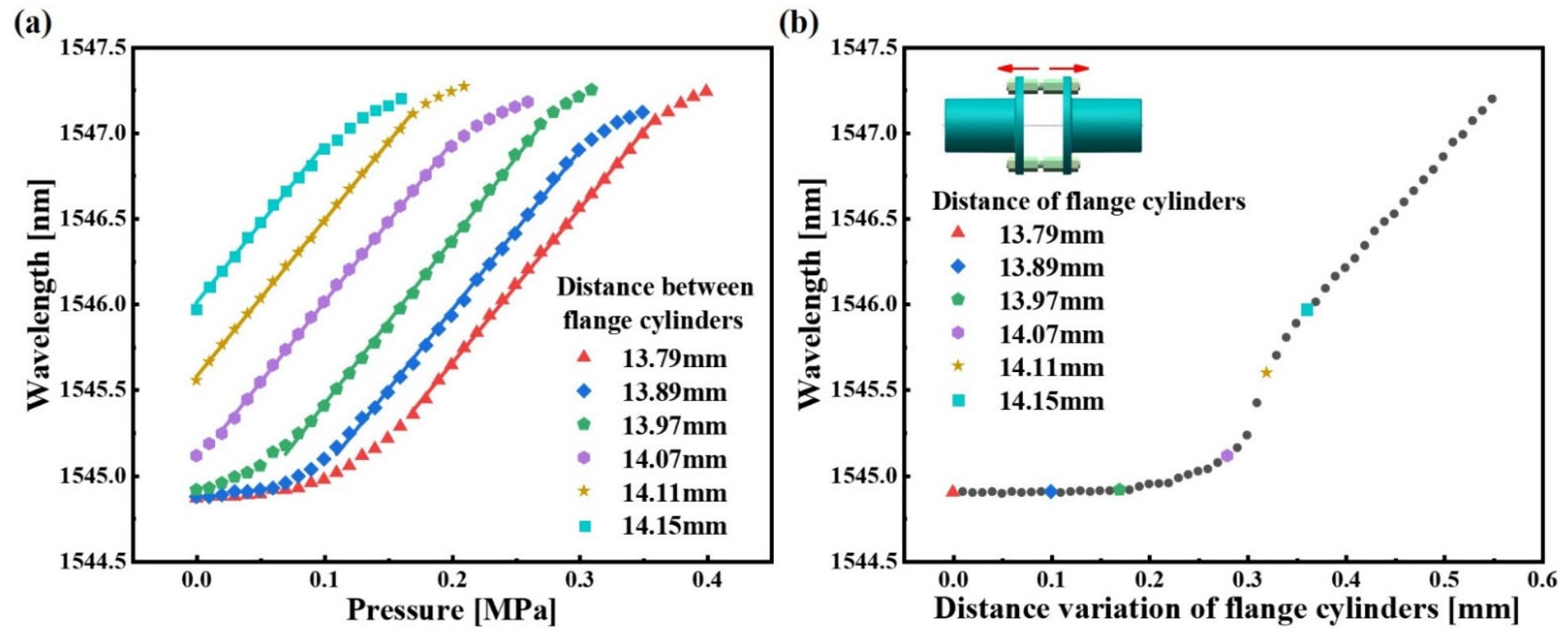
Figure 10a shows the measurement range of the sensor under different
. From
Figure 10a, it can be observed that the measurement range of the sensor varies with the distance between the flange cylinders (
). When
is 13.79 mm, 13.89 mm, 13.97 mm or 14.07 mm, the FBG in the sensor is in pre-relaxed state, and the corresponding sensor measurement sensitivities are 9.035 nm/MPa, 9.318 nm/MPa, 9.595 nm/MPa and 9.342 nm/MPa in the measurement range of 0.17 MPa to 0.36 MPa, 0.11 MPa to 0.3 MPa, 0.07 MPa to 0.27 MPa and 0.02 MPa to 0.2 MPa liquid pressure, respectively. On the other hand, when
is 14.11 mm and 14.15 mm, the FBG in the sensor is in a pre-strained state, the corresponding measurement sensitivities are 9.105 nm/MPa and 9.206 nm/MPa in the measurement range of 0 MPa to 0.17 MPa and 0 MPa to 0.1 MPa liquid pressure, respectively. From the linear fitting outcomes, it can be shown that the sensor has high measurement sensitivity and good linearity in various water levels.
In order to improve the feasibility of the scheme, the relationship between the distance variation of flange cylinders (
) and the
should be studied and determined. In this work, the tensile testing machine and the OSA were used to determine the relationship between
and the
. The two sides of the sensor were fixed on the fixed clamp and the movable clamp of the tensile machine, respectively. The stretching range of the tensile machine was set to 0–0.55 mm at a step size of 0.01 mm. Then, the relationship between
and the
of the sensor is shown in
Figure 10b. From the result, when
varies from 0 to 0.19 mm, the
of the sensor is almost unchanged. When
varies from 0.19 to 0.55 mm, the
of the sensor increases as
increases. Thus, the proposed sensor can maintain high sensitivity in various water levels by adjusting the structure and the quasi-distributed liquid pressure sensing system with high sensitivity and large measurement range can be established by fully combining the advantages of the adjustable structure of the sensor and the quasi-distributed property of the FBG.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









