
Individuals with and without Visual Impairments Use a Force Feedback Device to Identify the Friction and Hardness of Haptic Surfaces


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
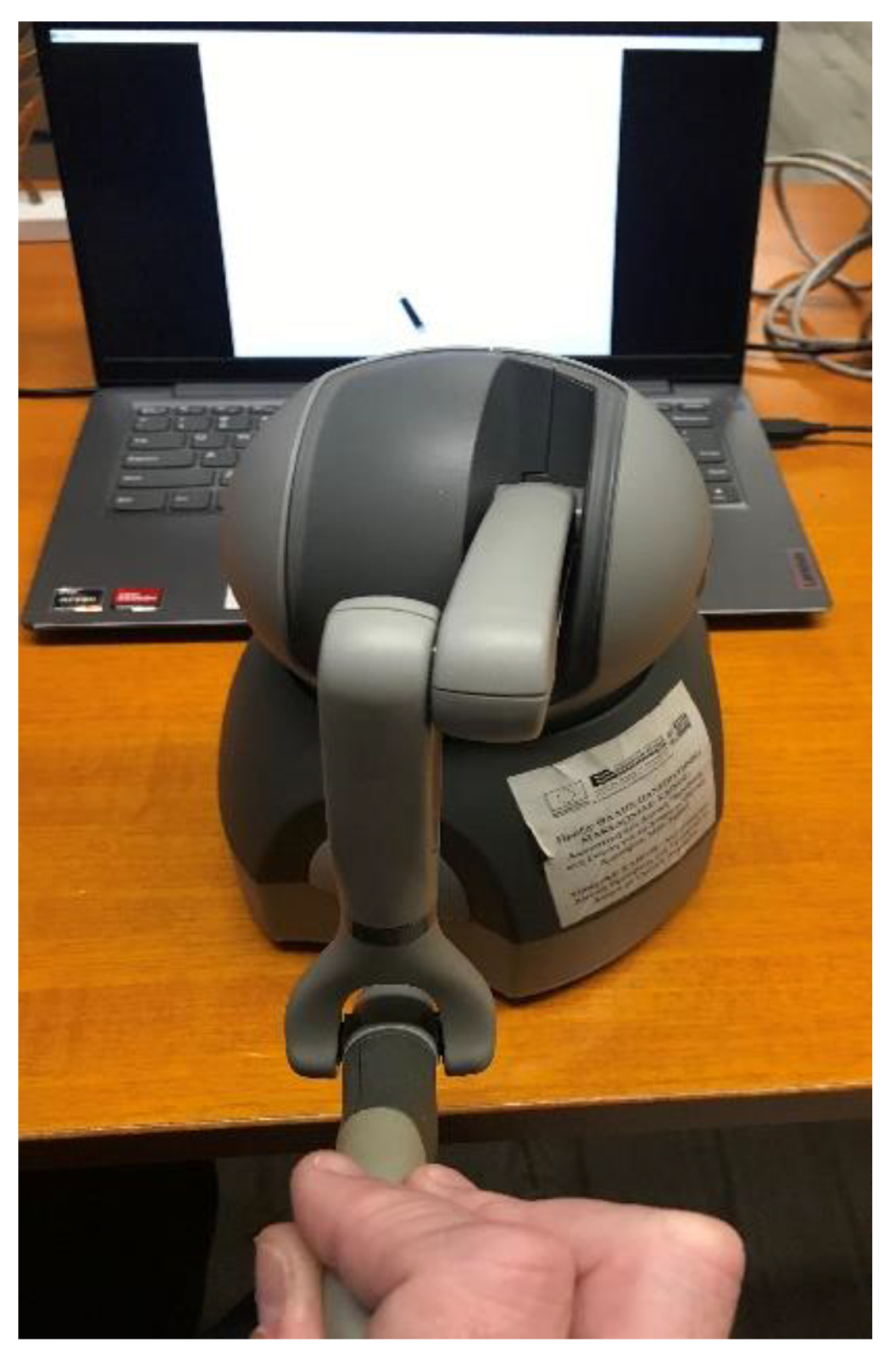
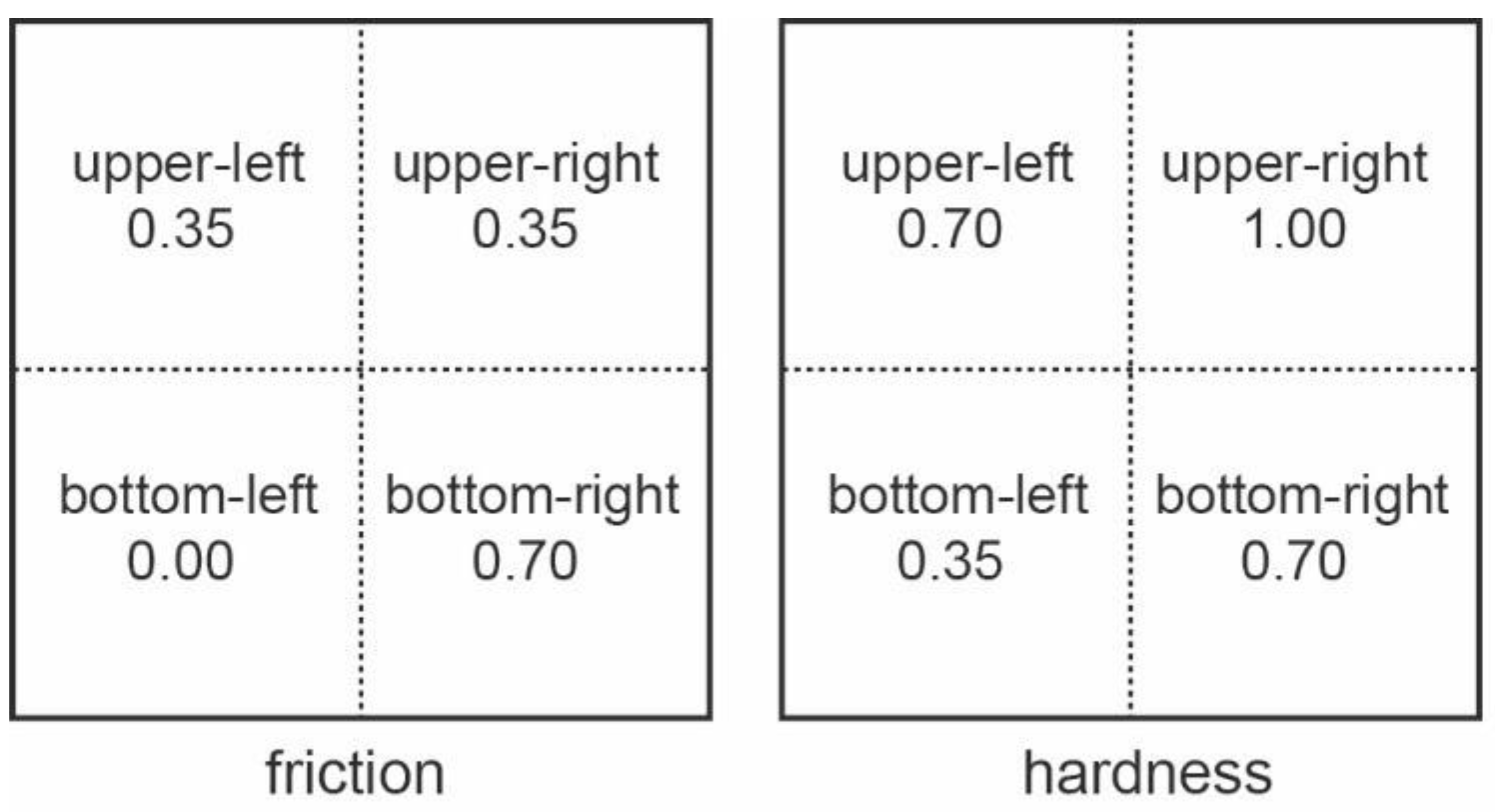
2.2. Instruments and Procedures
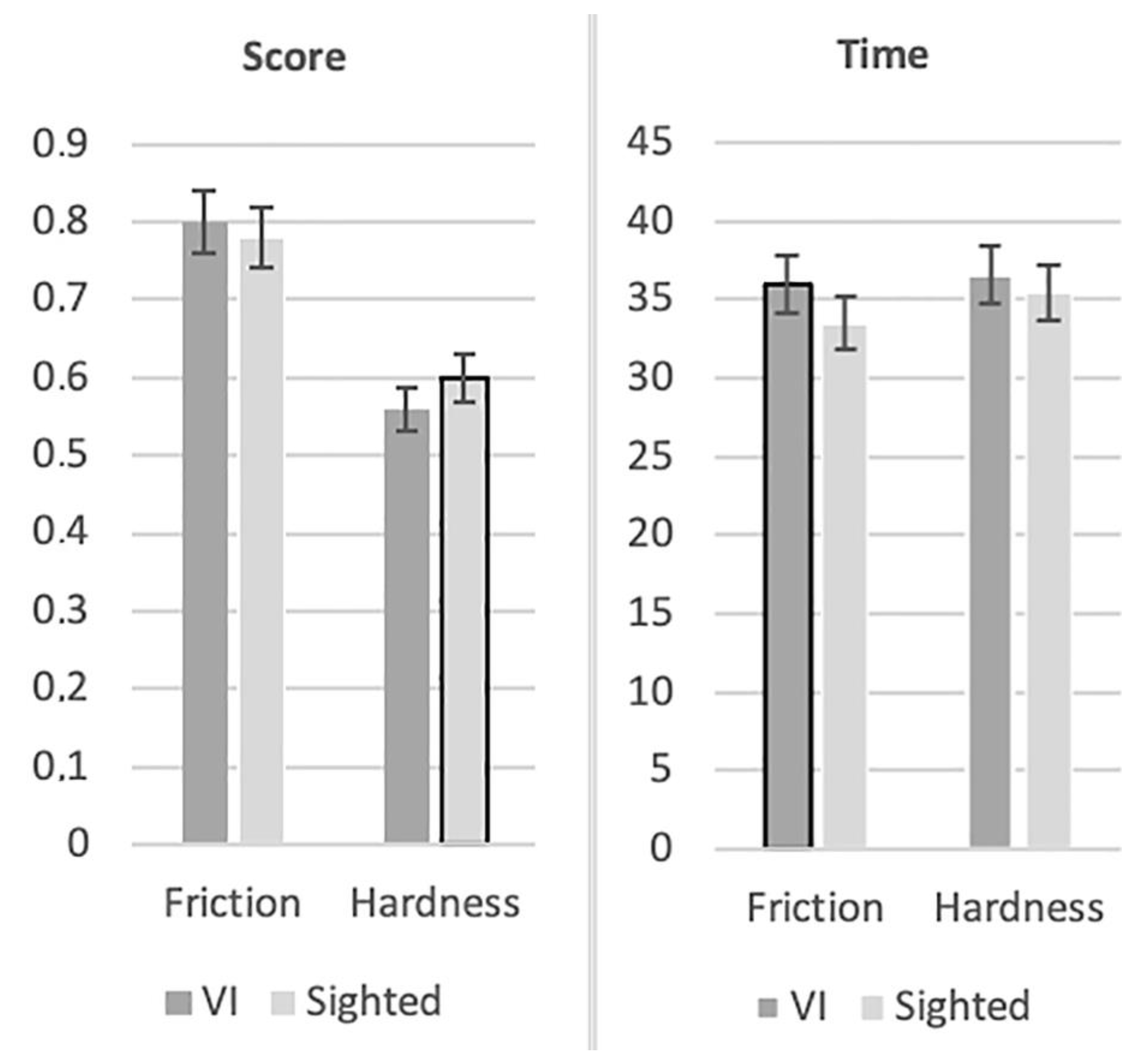
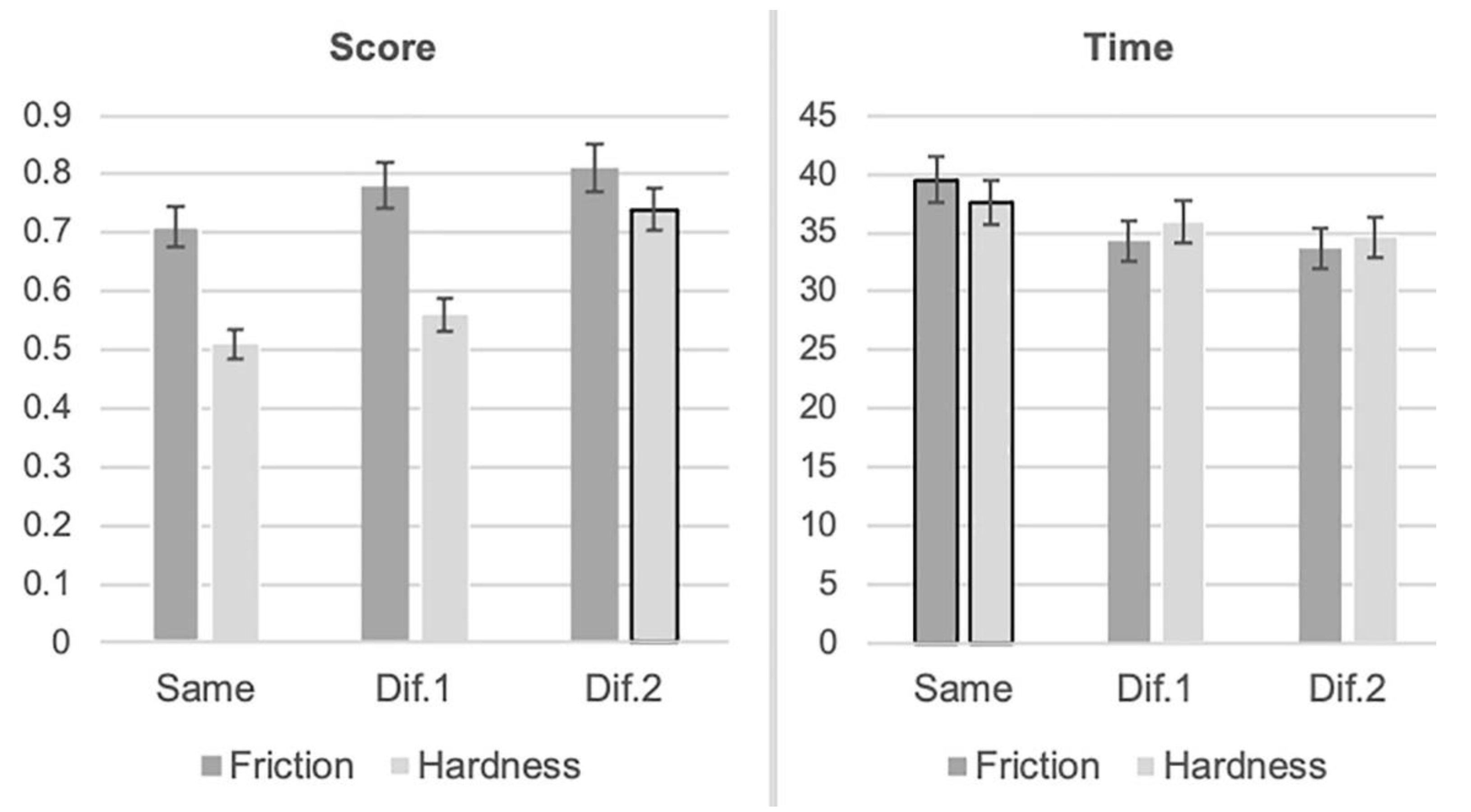
3. Results
4. Discussion
4.1. Better Performance in Different Surfaces
4.2. The Need to Scale Haptic Properties
4.3. Haptic Exploration by Individuals with VI
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gupta, R.; Balakrishnan, M.; Rao, P.V.M. Tactile Diagrams for the Visually Impaired. IEEE Potentials 2017, 36, 14–18. [Google Scholar] [CrossRef]
- Maidenbaum, S.; Buchs, G.; Abboud, S.; Lavi-Rotbain, O.; Amedi, A. Perception of Graphical Virtual Environments by Blind Users via Sensory Substitution. PLoS ONE 2016, 11, e0147501. [Google Scholar] [CrossRef] [PubMed]
- Jeslin, J.G.; Oketokun, A.O.; Nikkila, B. A Study of HAPTIC Based APPS for Mobile Contact List Call with Visual Impairments. J. Chem. Pharm. Sci. 2016, 9, 6. [Google Scholar]
- Selvi, S.S.; Shalini, S.; Selvi, T.A.; Kumar, J.N. Haptics Based Application for People with Visual Impairments. IJESC 2017, 7, 6437–6440. [Google Scholar]
- Melaisi, M.; Rojas, D.; Kapralos, B.; Uribe-Quevedo, A.; Collins, K. Multimodal Interaction of Contextual and Non-Contextual Sound and Haptics in Virtual Simulations. Informatics 2018, 5, 43. [Google Scholar] [CrossRef] [Green Version]
- James, T.W.; Kim, S.; Fisher, J.S. The Neural Basis of Haptic Object Processing. Can. J. Exp. Psychol. 2007, 61, 219–229. [Google Scholar] [CrossRef]
- Lederman, S.J.; Klatzky, R.L. Haptic Perception: A Tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef] [Green Version]
- Martínez, J.; García, A.S.; Molina, J.P.; Martínez, D.; González, P. An Empirical Evaluation of Different Haptic Feedback for Shape and Texture Recognition. Vis. Comput. 2013, 29, 111–121. [Google Scholar] [CrossRef]
- Whitaker, T.A.; Simões-Franklin, C.; Newell, F.N. Vision and Touch: Independent or Integrated Systems for the Perception of Texture? Brain Res. 2008, 1242, 59–72. [Google Scholar] [CrossRef]
- Heller, M.A. Texture Perception in Sighted and Blind Observers. Percept. Psychophys. 1989, 45, 49–54. [Google Scholar] [CrossRef] [Green Version]
- Cant, J.S.; Large, M.-E.; McCall, L.; Goodale, M.A. Independent Processing of Object Form and Surface Properties. J. Vis. 2006, 6, 612. [Google Scholar] [CrossRef]
- Lacey, S.; Hall, J.; Sathian, K. Are Surface Properties Integrated into Visuohaptic Object Representations? Eur. J. Neurosci. 2010, 31, 1882–1888. [Google Scholar] [CrossRef]
- Ho, C.; Basdogan, C.; Srinivasan, M.A. Efficient Point-Based Rendering Techniques for Haptic Display of Virtual Objects. Presence 1999, 8, 477–491. [Google Scholar] [CrossRef]
- Jansson, G.; Petrie, H.; Colwell, C.; Kornbrot, D.; Fänger, J.; König, H.; Billberger, K.; Hardwick, A.; Furner, S. Haptic Virtual Environments for Blind People: Exploratory Experiments with Two Devices. IJVR 1999, 4, 8–17. [Google Scholar] [CrossRef] [Green Version]
- Kang, Z.; Kim, K. Multimodal Perception Study on Virtual 3D Curved Textures with Vision and Touch for Interactive Multimedia Systems. Multimed. Tools Appl. 2018, 77, 2209–2223. [Google Scholar] [CrossRef]
- Lederman, S.J.; Klatzky, R.L. Sensing and Displaying Spatially Distributed Fingertip Forces in Haptic Interfaces for Teleoperator and Virtual Environment Systems. Presence Teleoper. Virtual Environ. 1999, 8, 86–103. [Google Scholar]
- Hollins, M.; Bensmaïa, S.; Karlof, K.; Young, F. Individual Differences in Perceptual Space for Tactile Textures: Evidence from Multidimensional Scaling. Percept. Psychophys. 2000, 62, 1534–1544. [Google Scholar] [CrossRef] [Green Version]
- Lederman, S.J.; Klatzky, R.L.; Tong, C.; Hamilton, C. The Perceived Roughness of Resistive Virtual Textures: II. Effects of Varying Viscosity with a Force-Feedback Device. ACM Trans. Appl. Percept. 2006, 3, 15–30. [Google Scholar] [CrossRef]
- Smith, A.M.; Basile, G.; Theriault-Groom, J.; Fortier-Poisson, P.; Campion, G.; Hayward, V. Roughness of Simulated Surfaces Examined with a Haptic Tool: Effects of Spatial Period, Friction, and Resistance Amplitude. Exp. Brain Res. 2010, 202, 33–43. [Google Scholar] [CrossRef]
- Bergmann Tiest, W.M. Tactual Perception of Material Properties. Vis. Res. 2010, 50, 2775–2782. [Google Scholar] [CrossRef] [Green Version]
- Hollins, M.; Seeger, A.; Pelli, G.; Taylor, R. Haptic Perception of Virtual Surfaces: Scaling Subjective Qualities and Interstimulus Differences. Perception 2004, 33, 1001–1019. [Google Scholar] [CrossRef]
- Etzi, R.; Ferrise, F.; Bordegoni, M.; Zampini, M.; Gallace, A. The Effect of Visual and Auditory Information on the Perception of Pleasantness and Roughness of Virtual Surfaces. Multisens. Res. 2018, 31, 501–522. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jansson, G. Can a Haptic Force Feedback Display Provide Visually Impaired People with Useful Information about Texture Roughness and 3D Form of Virtual Objects? In Proceedings of the 2nd European Conference on Disability, Virtual Reality and Associated Technologies, Skövde, Sweden, 10–11 September 1998. [Google Scholar]
- Jansson, G.; Fänger, J.; König, H.; Billberger, K. Visually impaired persons’ use of the PHANToM for information about texture and 3D form of virtual objects. In Proceedings of the Third PHANToM Users Group Workshop, Cambridge, MA, USA, 3–6 October 1998; Massachusetts Institute of Technology: Cambridge, MA, USA, 1998. [Google Scholar]
- Klatzky, R.L.; Lederman, S.J. The Perceived Roughness of Resistive Virtual Textures: I. Rendering by a Force-Feedback Mouse. ACM Trans. Appl. Percept. 2006, 3, 1–14. [Google Scholar] [CrossRef]
- Kornbrot, D.; Penn, P.; Petrie, H.; Furner, S.; Hardwick, A. Roughness Perception in Haptic Virtual Reality for Sighted and Blind People. Percept. Psychophys. 2007, 69, 502–512. [Google Scholar] [CrossRef] [Green Version]
- Unger, B.; Hollis, R.; Klatzky, R. Roughness Perception in Virtual Textures. IEEE Trans. Haptics 2011, 4, 122–133. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Unger, B.; Klatzky, R.; Hollis, R. The Physical Basis of Perceived Roughness in Virtual Sinusoidal Textures. IEEE Trans. Haptics 2013, 6, 496–505. [Google Scholar] [CrossRef] [PubMed]
- Higashi, K.; Okamoto, S.; Nagano, H.; Yamada, Y. Effects of Mechanical Parameters on Hardness Experienced by Damped Natural Vibration Stimulation. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics, Hong Kong, China, 9–12 October 2015; pp. 1539–1544. [Google Scholar] [CrossRef]
- Higashi, K.; Okamoto, S.; Yamada, Y. Perceived Hardness through Actual and Virtual Damped Natural Vibrations. IEEE Trans. Haptics 2018, 11, 646–651. [Google Scholar] [CrossRef]
- Park, J.; Oh, Y.; Tan, H.Z. Effect of Cutaneous Feedback on the Perceived Hardness of a Virtual Object. IEEE Trans. Haptics 2018, 11, 518–530. [Google Scholar] [CrossRef]
- Zhou, J.; Malric, F.; Petriu, E.M.; Georganas, N.D. Uniform Hardness Perception in 6-DOF Haptic Rendering. IEEE Trans. Instrum. Meas. 2011, 60, 214–225. [Google Scholar] [CrossRef]
- Provancher, W.R.; Sylvester, N.D. Fingerpad Skin Stretch Increases the Perception of Virtual Friction. IEEE Trans. Haptics 2009, 2, 212–223. [Google Scholar] [CrossRef]
- Ziherl, J.; Munih, M. Identifying and Presenting Friction Properties of Materials Using a Haptic Robot. In Proceedings of the 2012 4th IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 159–164. [Google Scholar] [CrossRef]
- Nam, C.S.; Whang, M.; Liu, S.; Moore, M. Wayfinding of Users with Visual Impairments in Haptically Enhanced Virtual Environments. Int. J. Hum.–Comput. Interact. 2015, 31, 295–306. [Google Scholar] [CrossRef]
- Comes, R. Haptic Devices and Tactile Experiences in Museum Exhibitions. J. Anc. Hist. Archaeol. 2016, 3, 60–64. [Google Scholar] [CrossRef] [Green Version]
- Papadopoulos, K.S. Tactile Cartography and Tactile Maps. Ph.D. Thesis, Aristotle University of Thessaloniki, Thessaloniki, Greece, 2000. [Google Scholar]
- Zhu, S.; Kuber, R.; Tretter, M.; O’Modhrain, M.S. Identifying the Effectiveness of Using Three Different Haptic Devices for Providing Non-Visual Access to the Web. Interact. Comput. 2011, 23, 565–581. [Google Scholar] [CrossRef]
- Kuber, R.; Zhu, S.; Arber, Y.; Norman, K.; Magnusson, C. Augmenting the Non-Visual Web Browsing Process Using the Geomagic Touch Haptic Device. SIGACCESS Access. Comput. 2014, 109, 4–10. [Google Scholar] [CrossRef]
- Tong, Q.; Yuan, Z.; Liao, X.; Zheng, M.; Yuan, T.; Zhao, J. Magnetic Levitation Haptic Augmentation for Virtual Tissue Stiffness Perception. IEEE Trans. Vis. Comput. Graph. 2018, 24, 3123–3136. [Google Scholar] [CrossRef] [PubMed]
- Tzovaras, D.; Nikolakis, G.; Fergadis, G.; Malasiotis, S.; Stavrakis, M. Design and Implementation of Haptic Virtual Environments for the Training of the Visually Impaired. IEEE Trans. Neural Syst. Rehabil. Eng. 2004, 12, 266–278. [Google Scholar] [CrossRef]
- SenseGraphics AB. H3D API—Haptics Software Development Platform. Available online: http://www.h3dapi.org (accessed on 15 October 2022).




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papadopoulos, K.; Koustriava, E.; Georgoula, E.; Kalpia, V. Individuals with and without Visual Impairments Use a Force Feedback Device to Identify the Friction and Hardness of Haptic Surfaces. Sensors 2022, 22, 9745. https://doi.org/10.3390/s22249745
Papadopoulos K, Koustriava E, Georgoula E, Kalpia V. Individuals with and without Visual Impairments Use a Force Feedback Device to Identify the Friction and Hardness of Haptic Surfaces. Sensors. 2022; 22(24):9745. https://doi.org/10.3390/s22249745
Chicago/Turabian StylePapadopoulos, Konstantinos, Eleni Koustriava, Evangelia Georgoula, and Vaia Kalpia. 2022. "Individuals with and without Visual Impairments Use a Force Feedback Device to Identify the Friction and Hardness of Haptic Surfaces" Sensors 22, no. 24: 9745. https://doi.org/10.3390/s22249745
APA StylePapadopoulos, K., Koustriava, E., Georgoula, E., & Kalpia, V. (2022). Individuals with and without Visual Impairments Use a Force Feedback Device to Identify the Friction and Hardness of Haptic Surfaces. Sensors, 22(24), 9745. https://doi.org/10.3390/s22249745