
Verification of Tensile Force Estimation Method for Temporary Steel Rods of FCM Bridges Based on Area of Magnetic Hysteresis Curve Using Embedded Elasto-Magnetic Sensor



Abstract
:1. Introduction
2. Theoretical Background and Methods
2.1. EM Sensor
2.2. Prestress Loss in PSC Bridge
2.3. Tensile Force Estimation through Measuring Area of Magnetic Hysteresis Curve
2.4. Temperature Compensation Method
3. Field Experimental Results and Discussion
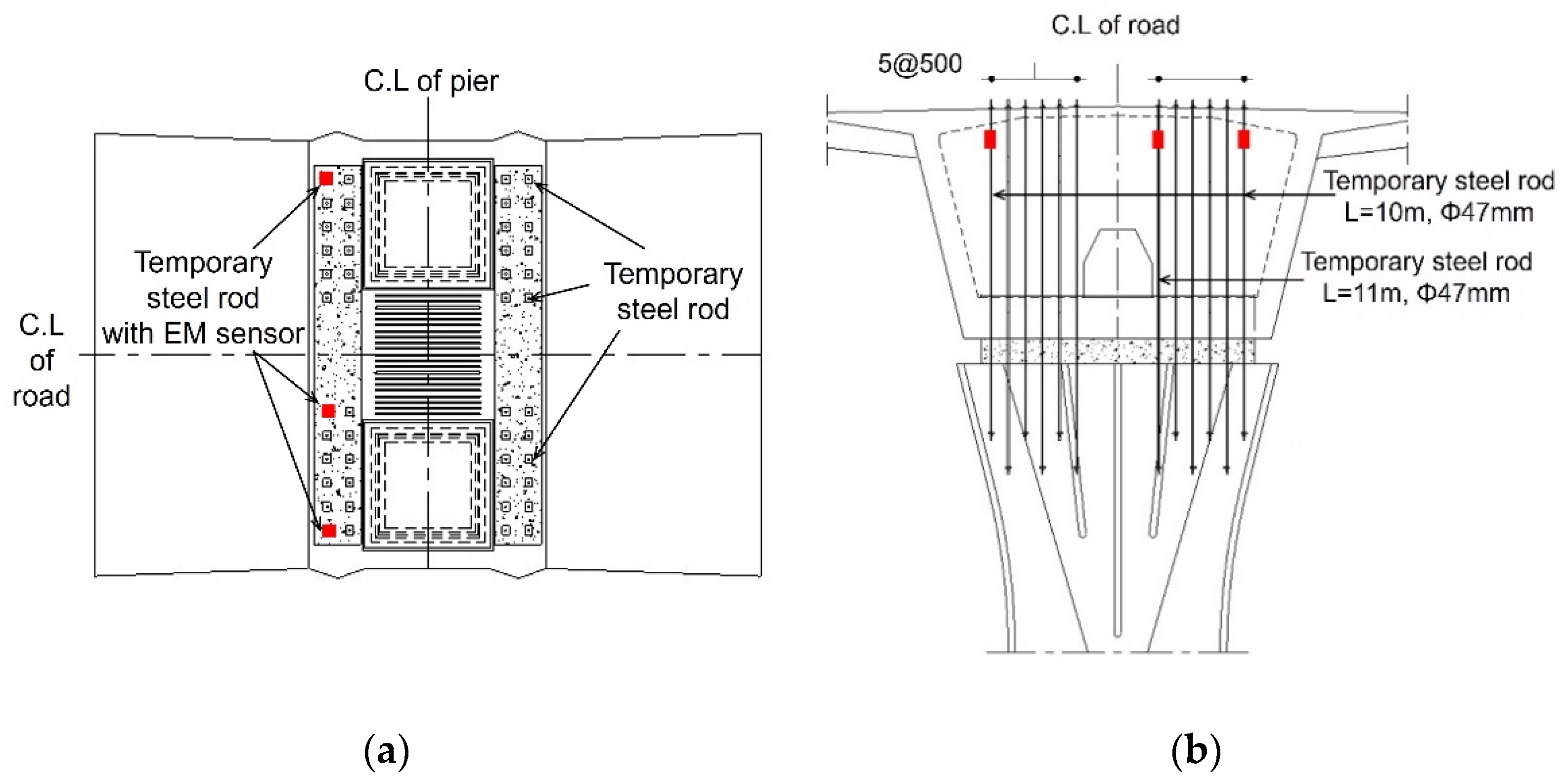
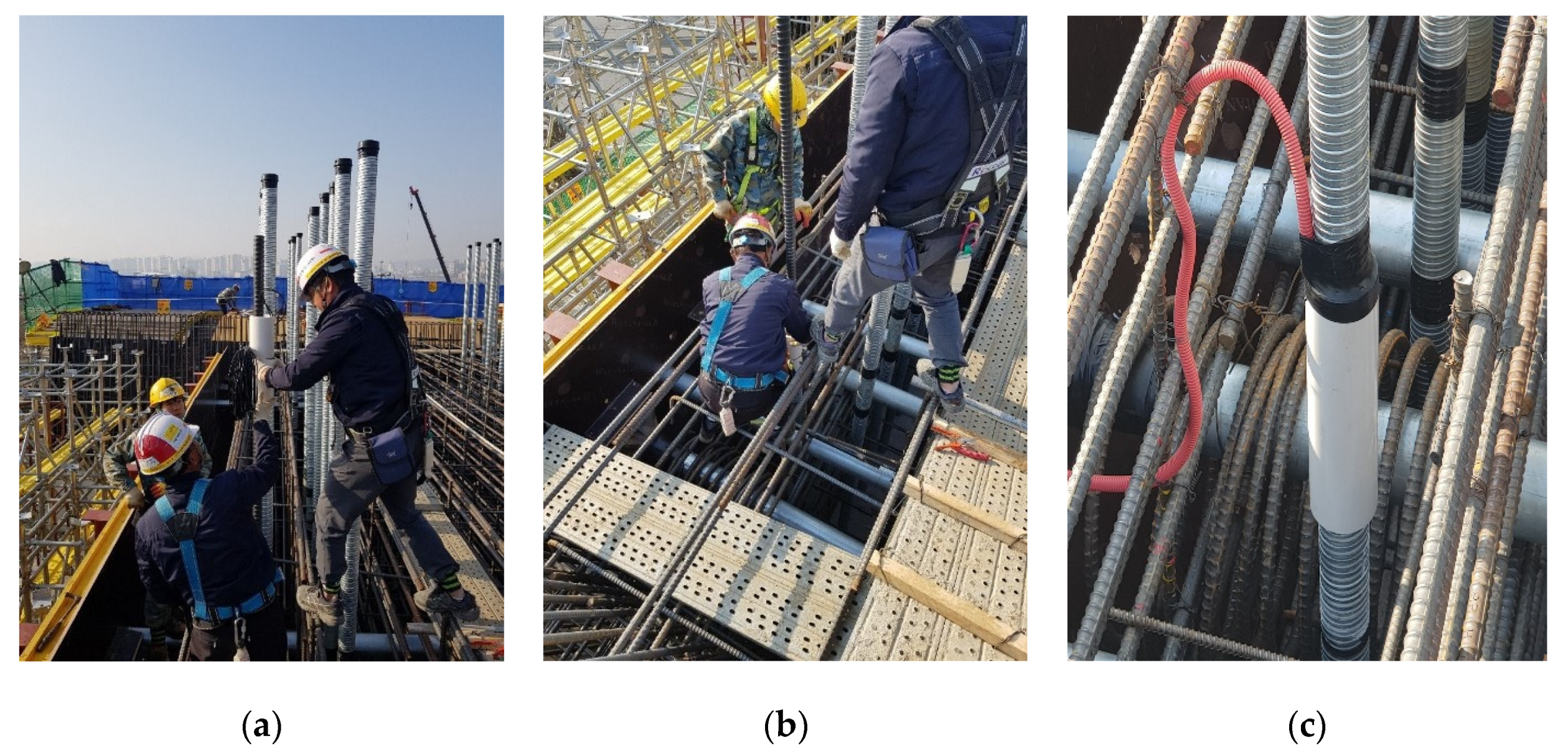
3.1. Experimental Setup
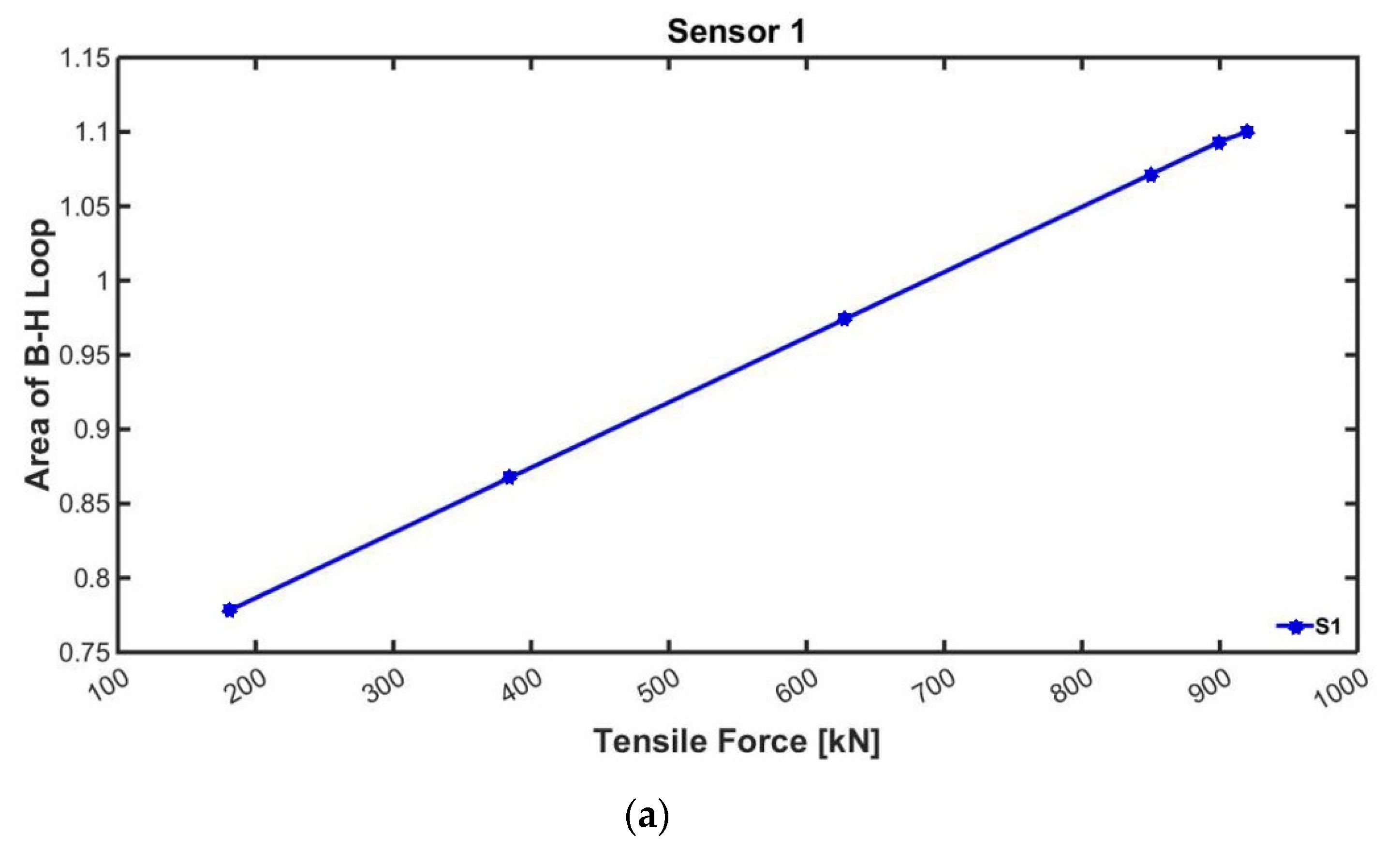
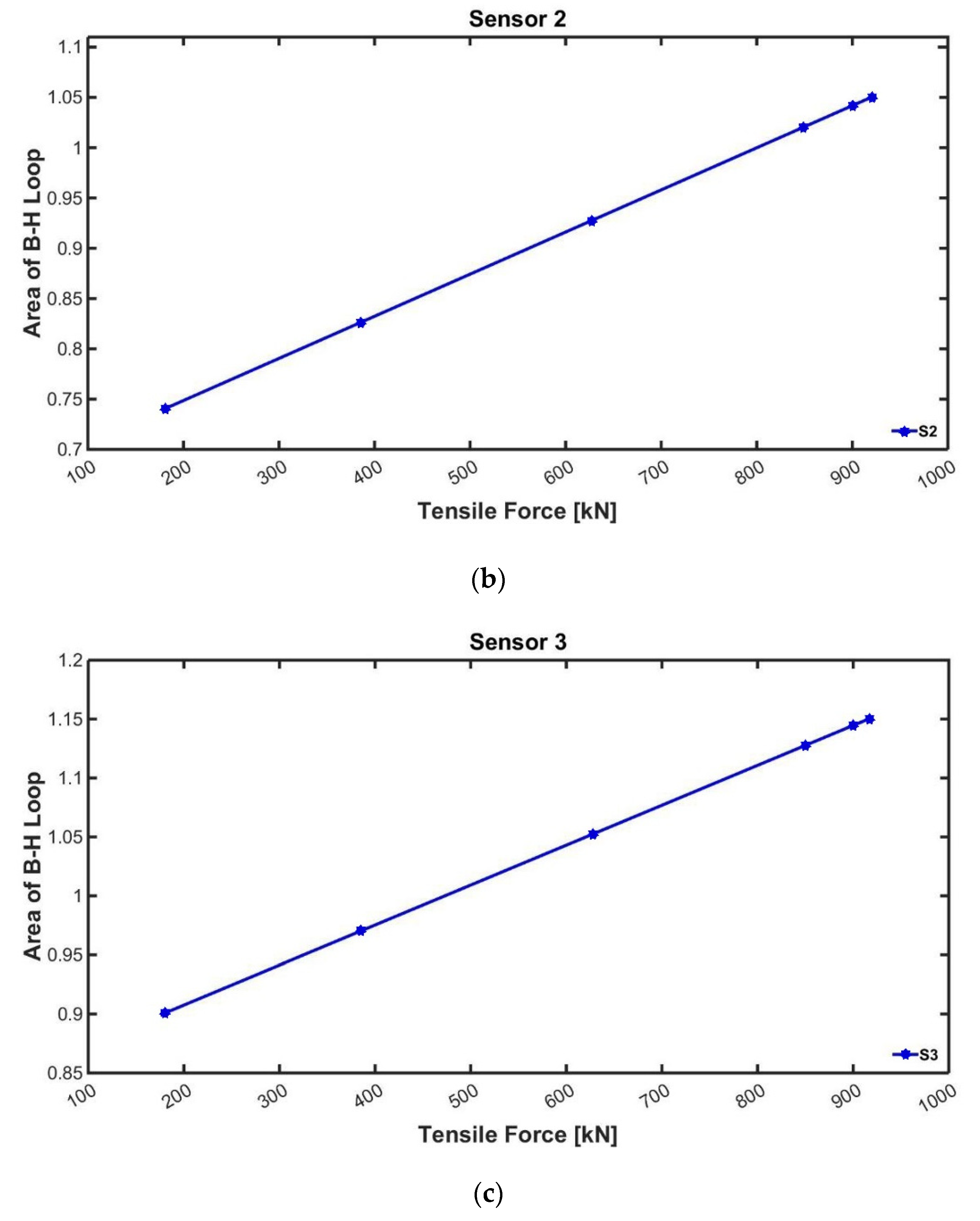
3.2. Initial Value Calibration of Tensile Force
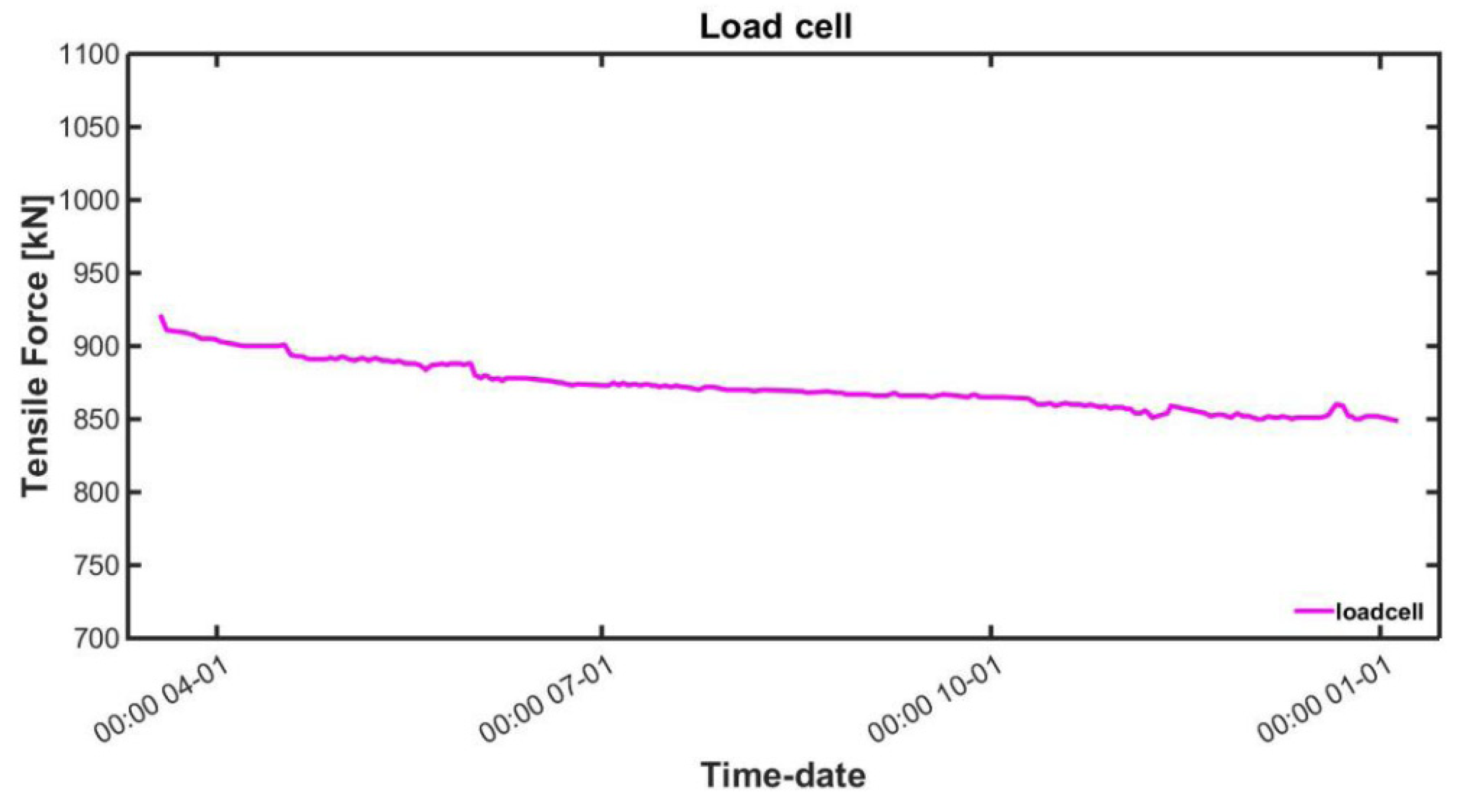
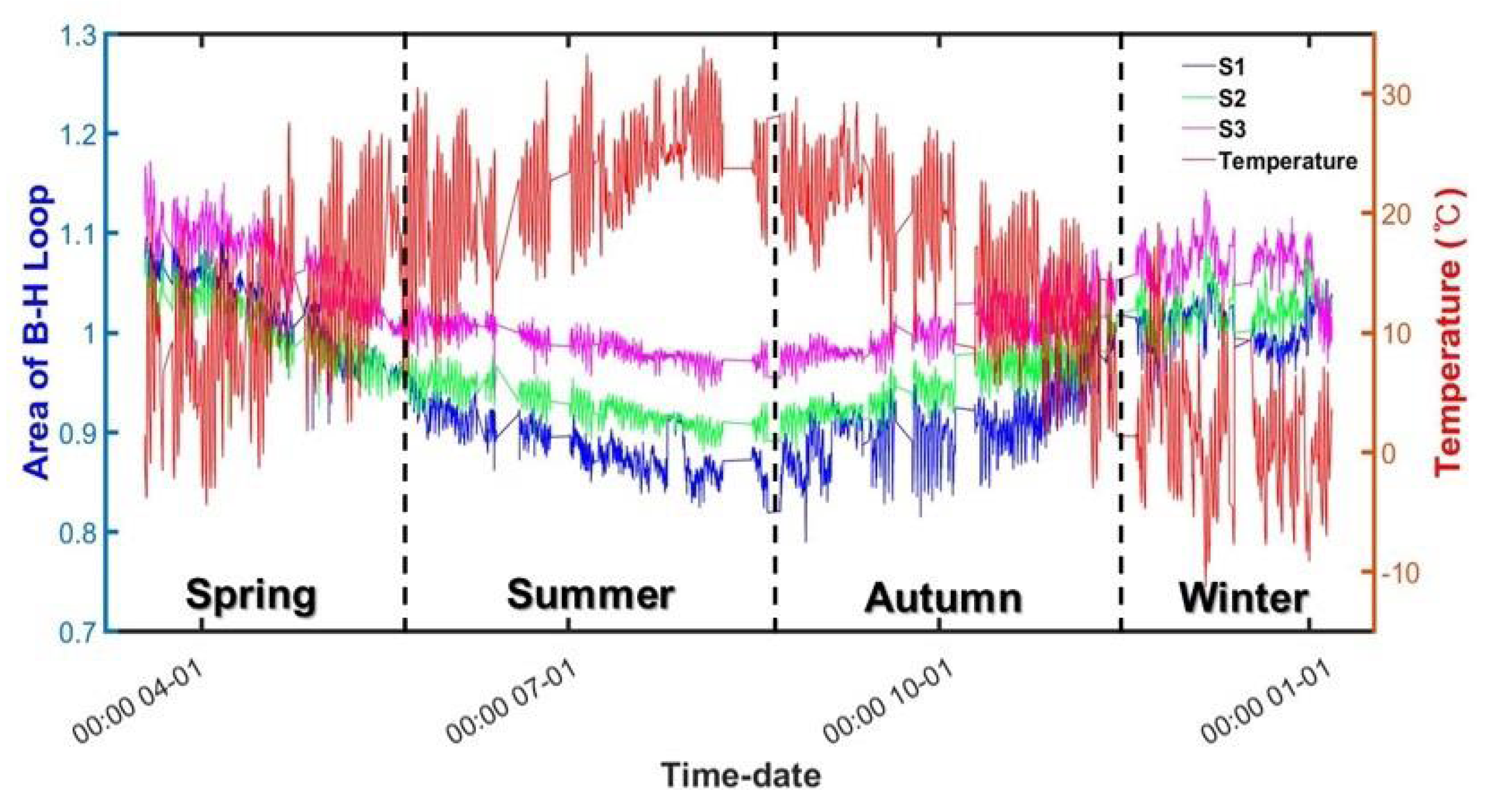
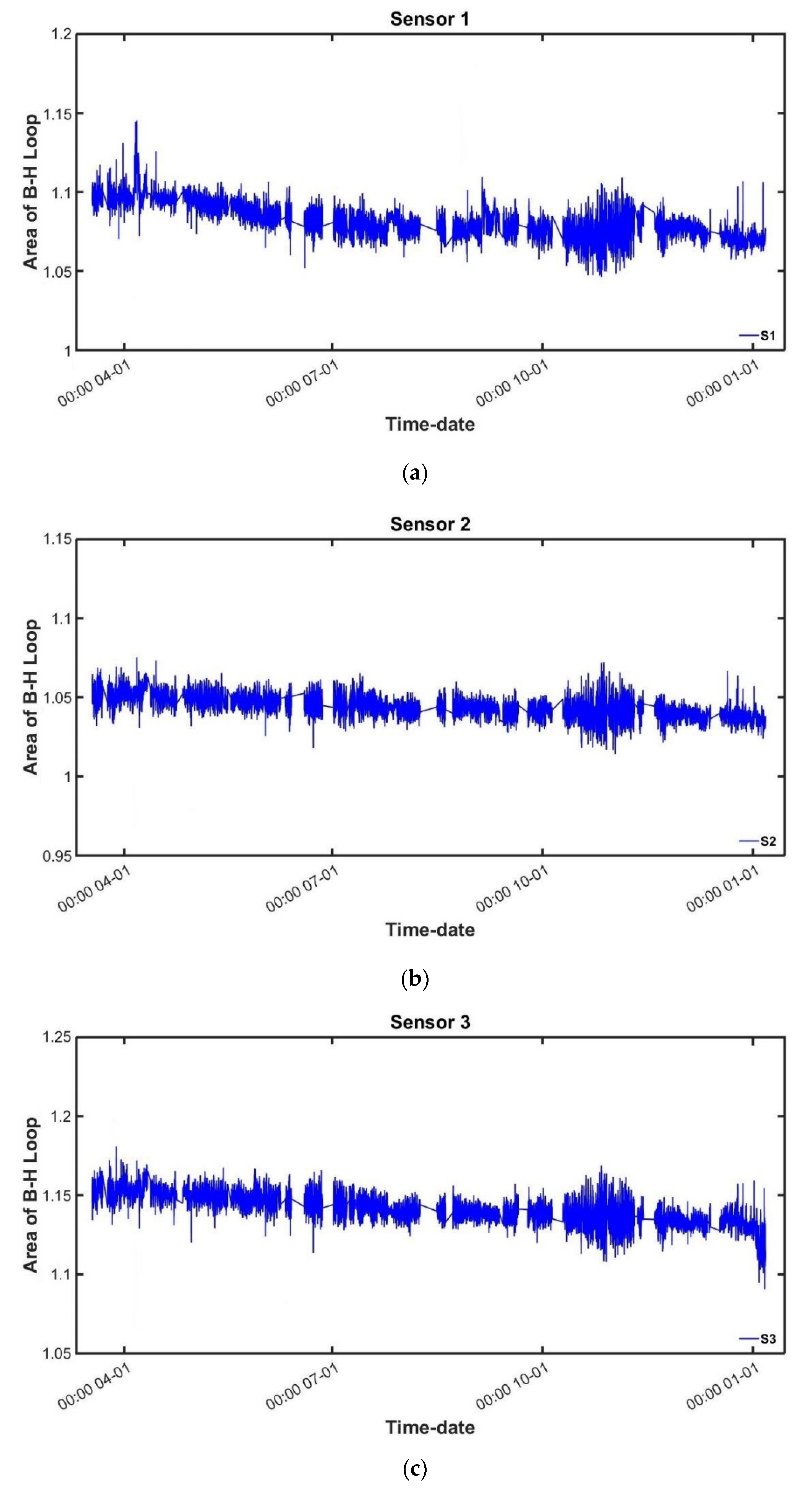
3.3. Measurement Results of the Field Experiment
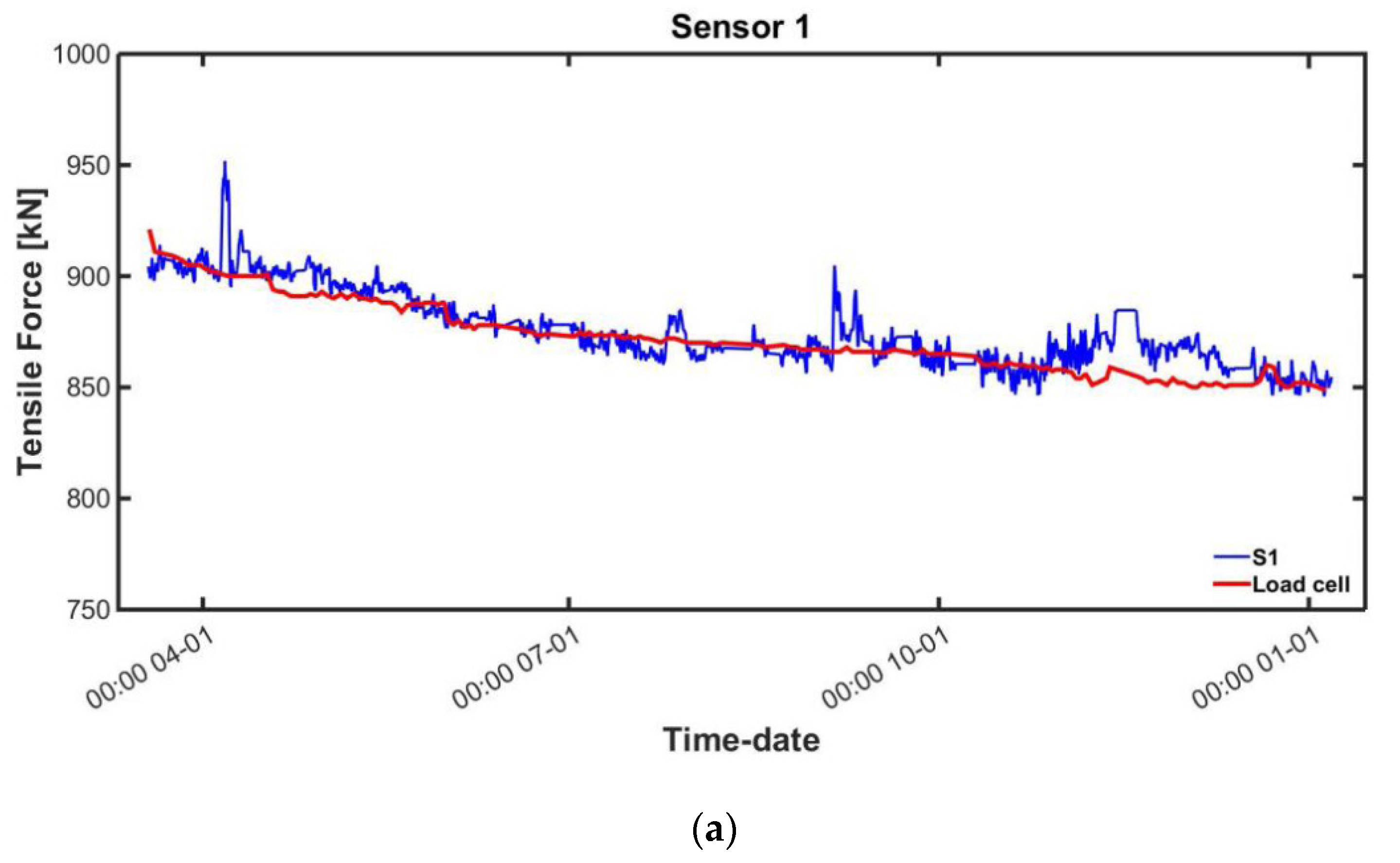
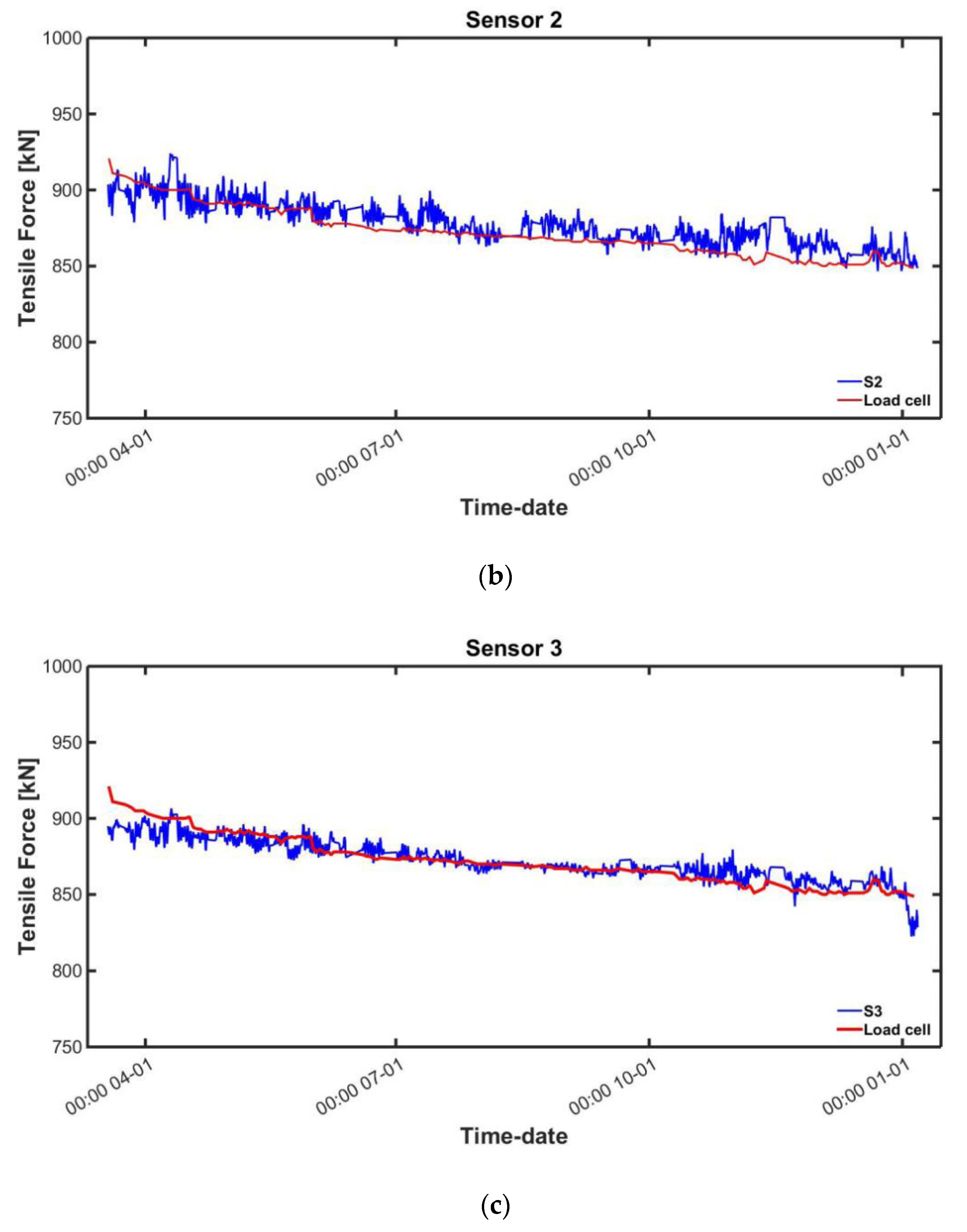
3.4. Tensile Force Estimation with Temperature-Compensated Data
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lee, C.; Park, S.; Bolander, J.E.; Pyo, S. Monitoring the hardening process of ultra high performance concrete using decomposed modes of guided waves. Constr. Build. Mater. 2018, 163, 267–276. [Google Scholar] [CrossRef]
- Kim, J.-W.; Park, M.; Kim, J.; Park, S. Improvement of MFL sensing–based damage detection and quantification for steel bar NDE. Smart Struct. Syst. 2018, 22, 239–247. [Google Scholar]
- Hewson, N.R. Prestressed concrete in bridgeworks. In Prestressed Concrete Bridges: Design and Construction; Thomas Telford: London, UK, 2003; pp. 12–17. [Google Scholar]
- Rens, K.L.; Wipf, T.J.; Klaiber, F.W. Review of nondestructive evaluation techniques of civil infrastructure. J. Perform. Constr. Fac. 1997, 11, 152–160. [Google Scholar] [CrossRef]
- Kim, J.M.; Kim, H.W.; Park, Y.H.; Yang, I.H.; Kim, Y.S. FBG sensors encapsulated into 7-wire steel strand for tension monitoring of a prestressing tendon. Adv. Struct. Eng. 2012, 15, 907–917. [Google Scholar] [CrossRef]
- Lan, C.; Zhou, Z.; Ou, J. Monitoring of structural prestress loss in RC beams by inner distributed Brillouin and fiber Bragg grating sensors on a single optical fiber. Struct. Control Health Monit. 2014, 21, 317–330. [Google Scholar] [CrossRef]
- Wang, M.L.; Wang, G.; Zhao, A. Application of EM Stress Sensors in Large Steel Cables. In Sensing Issues in Civil Structural Health Monitoring; Springer: New York City, NY, USA, 2005; pp. 145–154. [Google Scholar]
- Kim, J.; Kim, J.-W.; Lee, C.; Park, S. Development of Embedded EM Sensors for Estimating Tensile Forces of PSC Girder Bridge. Sensors 2017, 17, 1989. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, J.; Kim, J.-W.; Park, S. Investigation of Applicability of an Embedded EM Sensor to Measure the Tension of a PSC Girder. J. Sens. 2019, 2019, 2469647. [Google Scholar] [CrossRef]
- Saiidi, M.; Douglas, B.; Feng, S. Prestress Force Effect on Vibration Frequency of Concrete Bridges. J. Struct. Eng. 1994, 120, 2233–2241. [Google Scholar] [CrossRef]
- Chen, H.L.; Wissawapaisal, K. Measurement of Tensile Forces in a Seven-wire Prestressing Strands using Stress Waves. J. Eng. Mech. 2001, 127, 599–606. [Google Scholar] [CrossRef]
- Salamone, S.; Bartoli, I.; Nucera, C. Health Monitoring of Prestressing Tendons in Post-tensioned Concrete Structures. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 14 April 2011. [Google Scholar]
- Joh, C.; Lee, J.W.; Kwahk, I. Feasibility study of stress measurement in prestressing tendons using Villari effect and induced magnetic field. Int. J. Distrib. Sens. Netw. 2013, 9, 249829. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.L.; Wissawapaisal, K. Application of Wigner-Ville Transform to Evaluate Tensile Forces in Seven-Wire Prestressing Strands. J. Eng. Mech. 2002, 128, 1206–1214. [Google Scholar] [CrossRef]
- Chaki, S.; Bourse, G. Stress Level Measurement in Prestressed Steel Strands Using Acoustoelastic Effect. Exp. Mech. 2009, 49, 673–681. [Google Scholar] [CrossRef]
- Tang, T.; Yang, D.H.; Wang, L.; Zhang, J.R.; Yi, T.H. Design and application of structural health monitoring system in long-span cable-membrane structure. Earthq. Eng. Eng. Vib. 2019, 18, 461–474. [Google Scholar] [CrossRef]
- Yang, D.H.; Yi, T.H.; Li, H.N.; Zhang, Y.F. Correlation-Based Estimation Method for Cable-Stayed Bridge Girder Deflection Variability under Thermal Action. J. Perform. Constr. Facil. 2018, 32, 04018070. [Google Scholar] [CrossRef]
- Zhukov, A.; Vazquez, M.; Garcia-Beneytez, J.M. Magnetoelastic sensor for signature identification based on mechanomagnetic effect in amorphous wires. J. Phys. IV 1998, 8, Pr2-763–Pr2-766. [Google Scholar] [CrossRef]
- Zhukov, A.; Zhukova, V.; Larin, V.; Gonzalez, J. Tailoring of magnetic anisotropy of Fe-rich microwires by stress induced anisotropy. Phys. B Condens. Matter 2006, 384, 1–4. [Google Scholar] [CrossRef]
- Dellinger, J.H. The Temperature Coefficient of Resistance of Copper; U.S. Government Printing Office: Washington, DC, USA, 1911; pp. 74–76.
- Hewson, N.R. Prestress design. In Prestressed Concrete Bridges: Design and Construction; Thomas Telford: London, UK, 2003; pp. 67–72. [Google Scholar]
- Jiles, D. Introduction to Magnetism and Magnetic Materials, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2015; pp. 109–130. [Google Scholar]
- Szpunar, B.; Szpunar, J. Influence of stresses on the hysteresis curve in constructional steel. IEEE Trans. Magn. 1984, 20, 1882–1884. [Google Scholar] [CrossRef]
- Kim, J. Tensile Force Measurement Technique for Prestressed Tendon of PSC Structures using Embedded EM Sensor and Machine Learning Method. Ph.D. Thesis, Sungkyunkwan University, Suwon, Korea, 2018. [Google Scholar]
- Lloyd, G.M.; Singh, V.; Wang, M.L. Experimental evaluation of differential thermal errors in magnetoelastic stress sensors for Re < 180. In Proceedings of the Sensors 2002 IEEE, Orlando, FL, USA, 12–14 June 2002. [Google Scholar]
- Lloyd, G.M.; Singh, V.; Wang, M.L.; Hovorka, O. Temperature Compensation and Scalability of Hysteretic/Anhysteretic Magnetic-Property Sensors. IEEE Sens. J. 2003, 3, 708–716. [Google Scholar] [CrossRef]
- Zhang, R.; Duan, Y.; Zhao, Y.; He, X. Temperature Compensation of Elasto-Magneto-Electric (EME) Sensors in Cable Force Monitoring Using BP Neural Network. Sensors 2018, 18, 2176. [Google Scholar] [CrossRef] [Green Version]
- Duan, Y.; Zhang, R.; Zhao, Y.; Or, S.; Fan, K.; Tang, Z. Smart elasto-magneto-electric (EME) sensors for stress monitoring of steel structures in railway infrastructures. J. Zhejiang. Univ. Sci. A 2011, 12, 895–901. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Values and Description | |
|---|---|---|
| Capacity | 1177 kN | |
| Ultimate overload | 150% of Capacity | |
| Resolution | 0.025% F.S. | |
| Accuracy | ±0.1~±1% F.S. | |
| Linearity error | ±0.5% F.S. | |
| Material | SCM alloy steel | |
| Gauge | 3 VW Strain gauge (4 Strain gauge) | |
| Thermal expansion coefficient | 10.8 × 10−6/°C | |
| Operating temp. range | −40 °C~80 °C | |
| Temp. sensor | Type | NTC Thermistor (3KD-ATF) |
| operating range | −40 °C~80 °C | |
| Accuracy | Thermistor: ±1 °C | |
| Waterproof | Fluoride O-ring, High-density vacuum grease coating | |
| Weight | 4.95 kg | |
| Classification | Primary Coil | Secondary Coil |
|---|---|---|
| Diameter of bobbin (mm) | 117 | 107 |
| Diameter of coil (mm) | 1.2 | 0.3 |
| Number of turns | 300 | 120 |
| Date | Load Cell (kN) | Sensor 1 | Sensor 2 | Sensor 3 | Temperature (°C) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Estimated Tension (kN) | Error Rate (%) | Estimated Tension (kN) | Error Rate (%) | Estimated Tension (kN) | Error Rate (%) | ||||
| 1 April 2019 | 7:00 | 891 | 893.89 | 0.32 | 896.06 | 0.57 | 890.64 | 0.04 | 1.1 |
| 12 April 2019 | 14:00 | 880 | 884.04 | 0.46 | 884.10 | 0.47 | 880.23 | 0.03 | 13.0 |
| 13 May 2019 | 10:00 | 875 | 874.15 | 0.10 | 882.55 | 0.86 | 880.84 | 0.67 | 23.1 |
| 30 May 2019 | 9:00 | 872 | 866.71 | 0.61 | 890.79 | 2.15 | 881.98 | 1.14 | 18.6 |
| 14 June 2019 | 8:00 | 869 | 861.24 | 0.89 | 871.08 | 0.24 | 872.91 | 0.45 | 22.8 |
| 17 July 2019 | 10:00 | 865 | 860.11 | 0.57 | 864.91 | 0.01 | 871.28 | 0.73 | 25.5 |
| 14 August 2019 | 11:00 | 861 | 875.60 | 1.70 | 870.31 | 1.08 | 864.30 | 0.38 | 30.0 |
| 6 September 2019 | 9:00 | 858 | 858.15 | 0.02 | 863.12 | 0.60 | 864.65 | 0.78 | 23.2 |
| 23 October 2019 | 15:00 | 850 | 877.66 | 3.25 | 877.31 | 3.21 | 867.11 | 2.01 | 18.5 |
| 6 December 2019 | 14:00 | 852 | 847.68 | 0.51 | 844.30 | 0.90 | 828.37 | 2.77 | 4.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, W.-K.; Kim, J.; Park, J.; Kim, J.-W.; Park, S. Verification of Tensile Force Estimation Method for Temporary Steel Rods of FCM Bridges Based on Area of Magnetic Hysteresis Curve Using Embedded Elasto-Magnetic Sensor. Sensors 2022, 22, 1005. https://doi.org/10.3390/s22031005
Kim W-K, Kim J, Park J, Kim J-W, Park S. Verification of Tensile Force Estimation Method for Temporary Steel Rods of FCM Bridges Based on Area of Magnetic Hysteresis Curve Using Embedded Elasto-Magnetic Sensor. Sensors. 2022; 22(3):1005. https://doi.org/10.3390/s22031005
Chicago/Turabian StyleKim, Won-Kyu, Junkyeong Kim, Jooyoung Park, Ju-Won Kim, and Seunghee Park. 2022. "Verification of Tensile Force Estimation Method for Temporary Steel Rods of FCM Bridges Based on Area of Magnetic Hysteresis Curve Using Embedded Elasto-Magnetic Sensor" Sensors 22, no. 3: 1005. https://doi.org/10.3390/s22031005
APA StyleKim, W.-K., Kim, J., Park, J., Kim, J.-W., & Park, S. (2022). Verification of Tensile Force Estimation Method for Temporary Steel Rods of FCM Bridges Based on Area of Magnetic Hysteresis Curve Using Embedded Elasto-Magnetic Sensor. Sensors, 22(3), 1005. https://doi.org/10.3390/s22031005