
Coverage Path Planning Methods Focusing on Energy Efficient and Cooperative Strategies for Unmanned Aerial Vehicles





Abstract
:1. Introduction
- A review of the decomposition methods in different shapes of the area of interest, such as rectangular, concave, irregular, and convex polygons, has been presented.
- A presentation of multi-robot and multi-UAV CPP strategies based on single robot approaches, methods that guarantee the mission’s completeness, and bio-inspired methods that perform coverage under uncertainty.
- A review of energy-saving algorithms and the limitations of them, according to the UAV’s constraints and environmental conditions.
- A discussion of the CPP methods’ limitations, how to overcome them, and directions for future research on energy-saving CPP algorithms.
2. Methods
3. Results
3.1. No Decomposition
3.2. Exact Cellular Decomposition
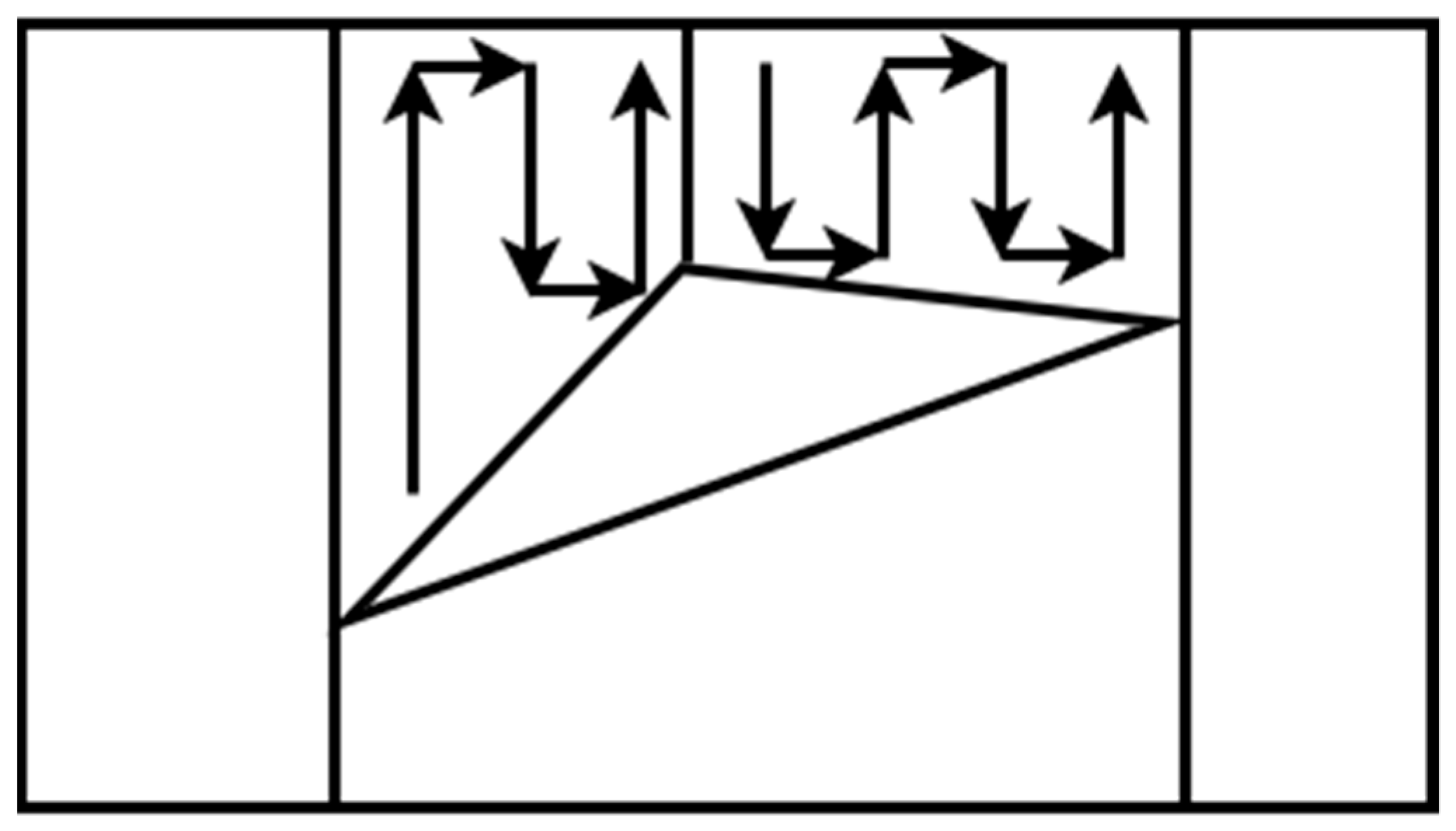
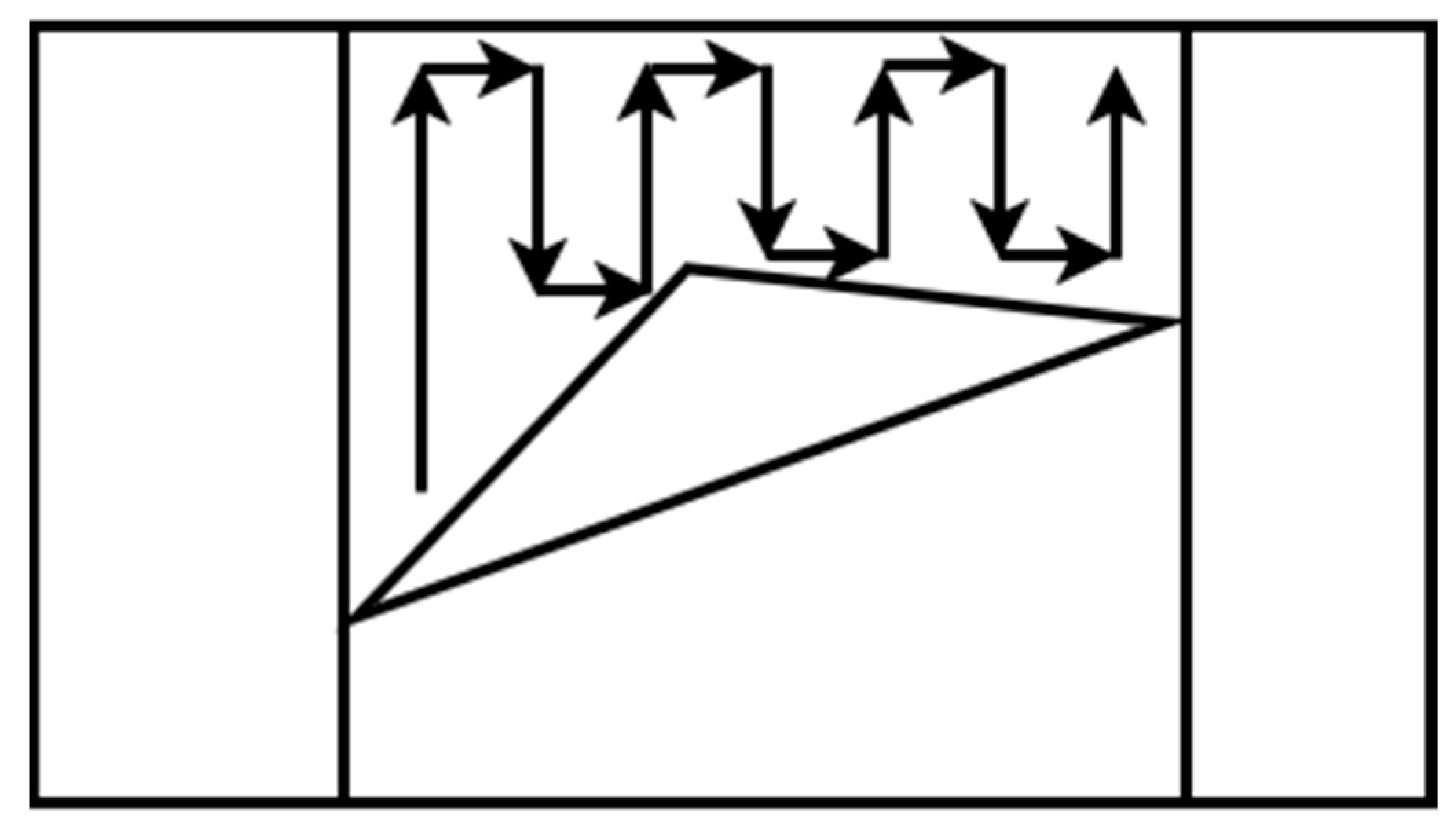
3.3. Trapezoidal Decomposition
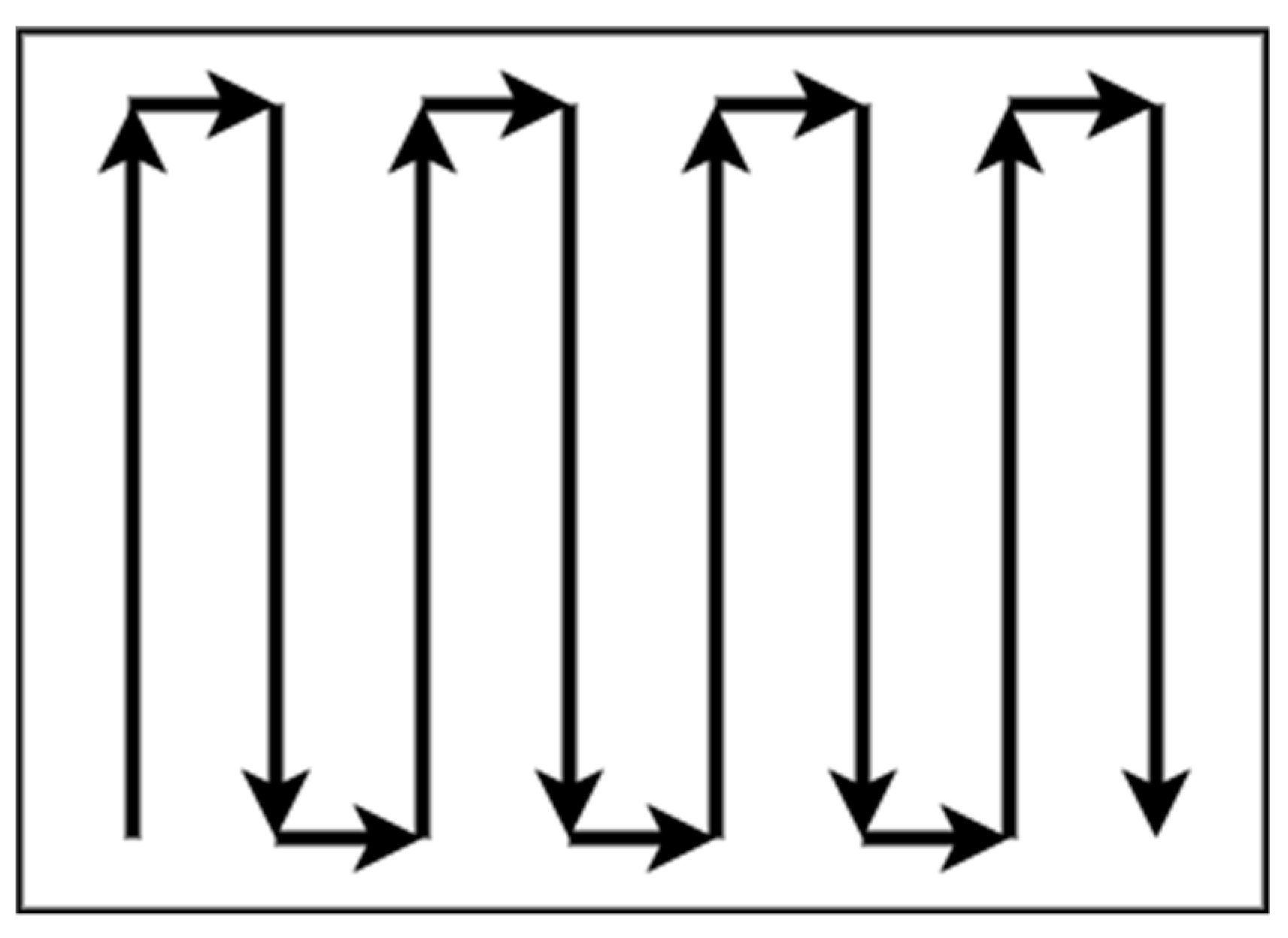
3.4. Boustrophedon Decomposition
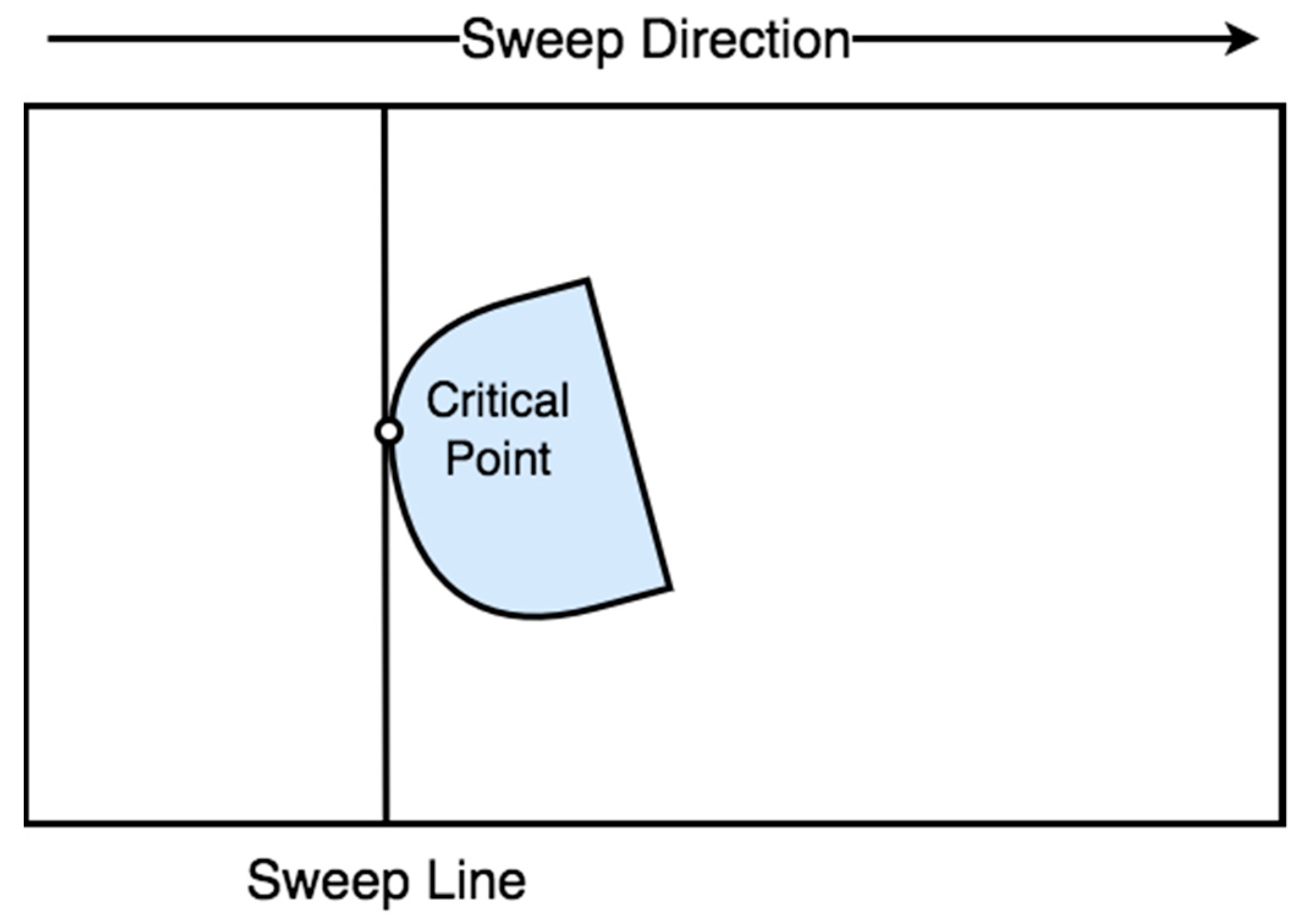
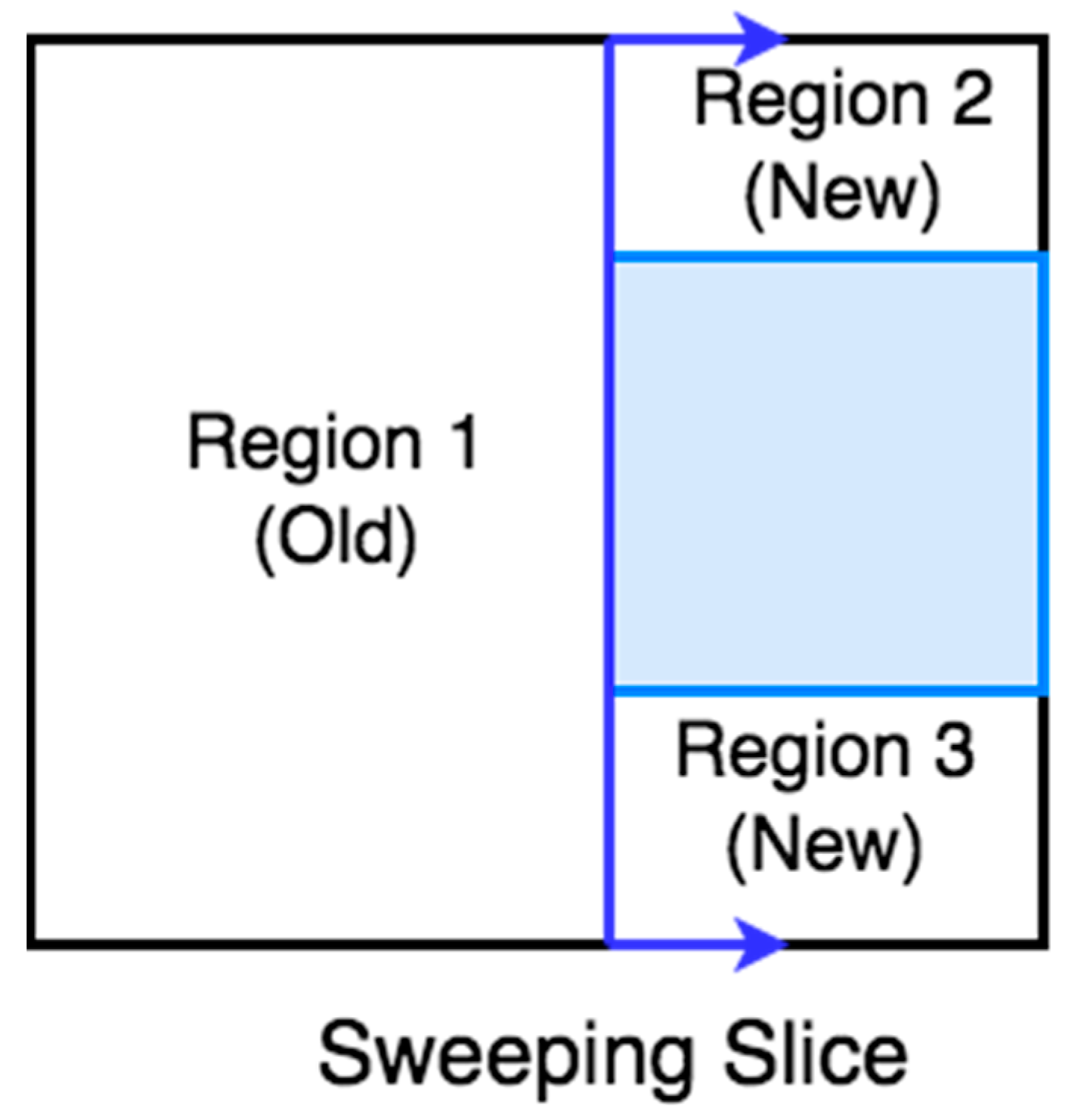
3.5. Morse-Based Decomposition
3.6. Online Topological Coverage Algorithm
3.7. Contact Sensor-Based Coverage of Rectilinear Environments
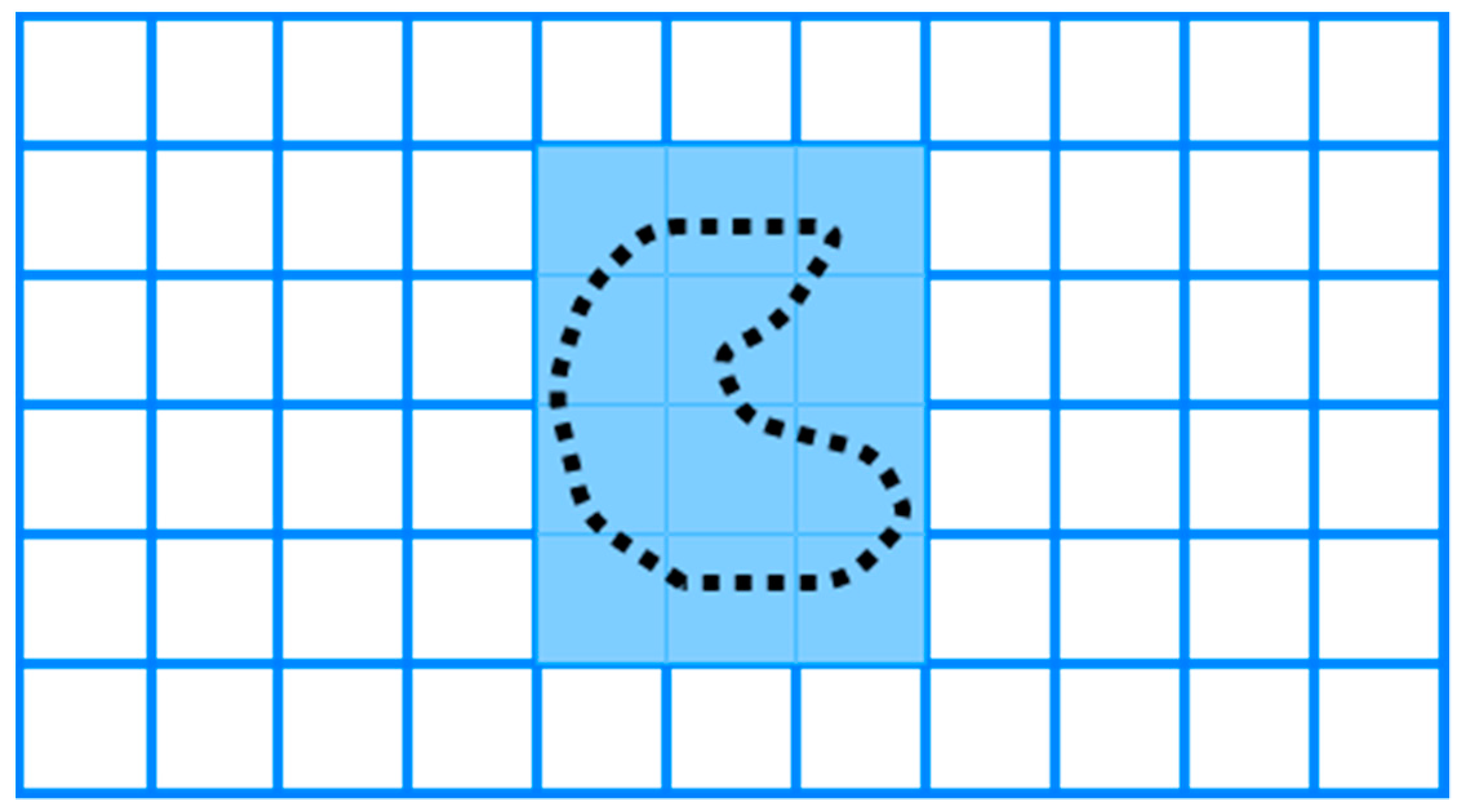
3.8. Grid-Based Methods
3.8.1. Wavefront Algorithm
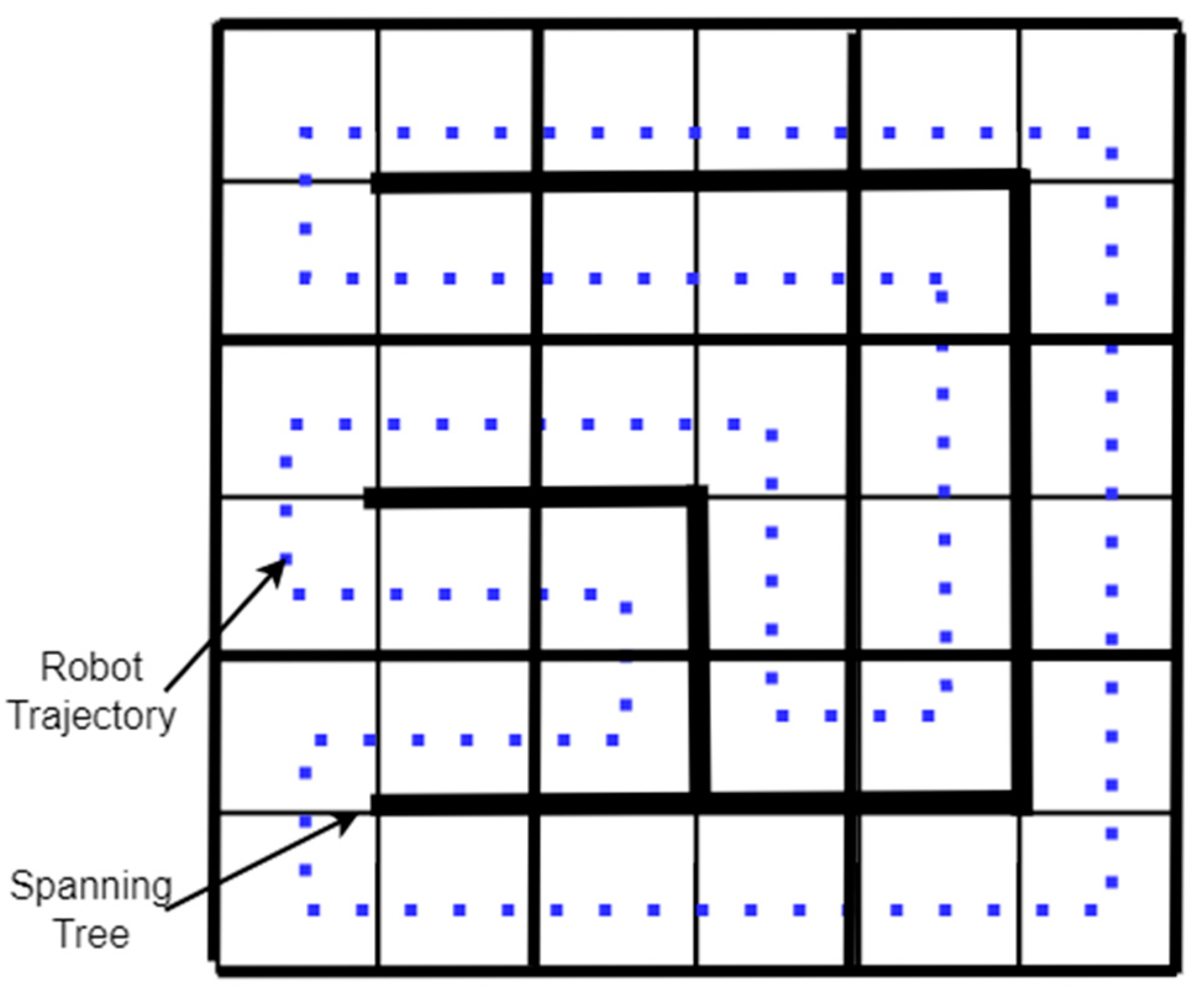
3.8.2. Spanning Tree Coverage
3.9. Neural Network-Based Coverage on Grid Maps

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CPP Approach | Decomposition Method | Algorithm Processing | Shape of Area | Reference |
|---|---|---|---|---|
| Boustrophedon | None | Offline | Rectangular | [33,34,35] |
| Square | None | Offline | Square | [36] |
| Boustrophedon, Spiral | Exact cellular | Offline | Polygon, Concave | [37] |
| Back and Forth | Trapezoidal | Offline | Polygon | [39,40] |
| Boustrophedon | Boustrophedon | Offline | Polygon | [33,35] |
| Boustrophedon | Morse-based | Online | Any dimensional | [42] |
| Online Topological | Slice | Online | Polygon | [46] |
| Contact Sensor-based | Exact cellular | Online | Rectilinear | [48] |
| Wavefront | Approximate cellular | Offline | Polygon, Concave | [50] |
| Wavefront | Approximate cellular | Online | Polygon, Concave | [51] |
| STC | Approximate cellular | Offline | Polygon, Concave | [37] |
| Spiral-STC | Approximate cellular | Online | Polygon, Concave | [52] |
| Neural Network-based | Approximate cellular | Online | Polygon, Concave | [53,54] |
3.10. Multi-Robot CPP Strategies
3.11. Multi-Robot Boustrophedon Decomposition
3.12. Multi-Robot Spanning Tree Coverage
3.13. Multi-Robot Neural Network-Based Coverage
3.14. Multi-Robot Graph-Based and Boundary Coverage
3.15. Multi-UAV CPP Methods
3.16. Multi-UAV Coverage
3.17. Back-and-Forth
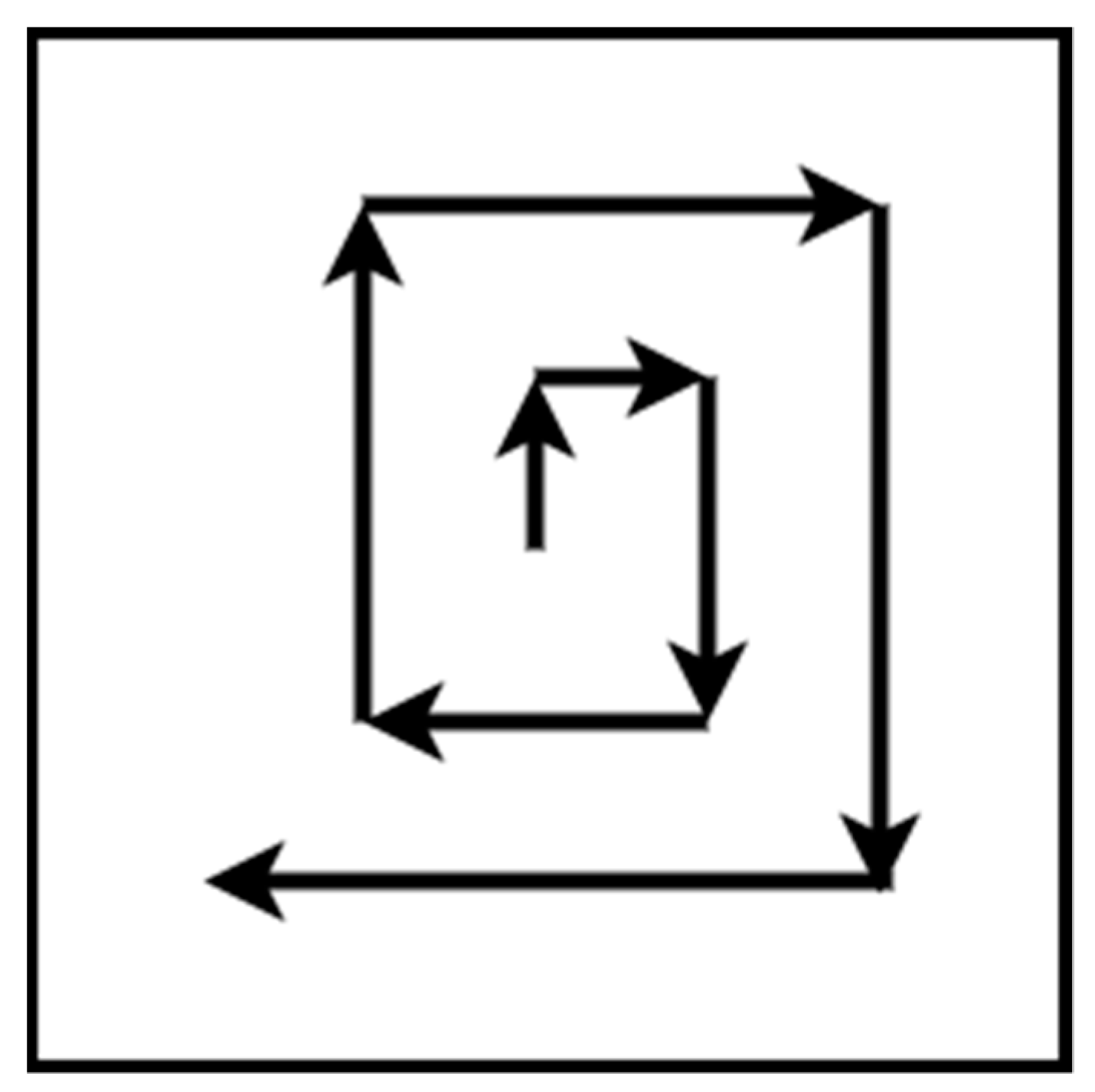
3.18. Spiral
3.19. Multi-Objective Path Planning (MOPP) with Genetic Algorithm (GA)
3.20. Genetic Algorithm (GA) with Flood Fill Algorithm
| CPP Approach | Type of UAVs | Algorithm Processing | Evaluation Metrics | Reference |
|---|---|---|---|---|
| Sub-perimeter method | Homogeneous | Online | Minimize latency | [63] |
| Back-and-Forth | Homogeneous | Online/Offline | Total path length Time coverage | [23,66] |
| Back-and-Forth | Heterogeneous | Offline | Number of turns | [61] |
| Spiral | Heterogeneous | Offline | Coverage path, Number of turns | [67,68] |
| Multi-Objective Path Planning with GA | Homogeneous | Offline/Online | Mission Completion Time | [73] |
| GA with flood fill algorithm | Homogeneous | Offline/Online | Path length | [74,75] |
3.21. Energy-Saving CPP Algorithms
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT Framework Views and Challenges: Towards Protecting Drones as “Things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Azpúrua, H.; Freitas, G.M.; Macharet, D.G.; Campos, M.F.M. Multi-Robot Coverage Path Planning Using Hexagonal Segmentation for Geophysical Surveys. Robotica 2018, 36, 1144–1166. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for Search and Rescue Operations in Mountain Avalanche Events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Yuan, C.; Liu, Z.; Zhang, Y. Aerial Images-Based Forest Fire Detection for Firefighting Using Optical Remote Sensing Techniques and Unmanned Aerial Vehicles. J. Intell. Robot. Syst. 2017, 88, 635–654. [Google Scholar] [CrossRef]
- Straub, J. Unmanned Aerial Systems: Consideration of the Use of Force for Law Enforcement Applications. Technol. Soc. 2014, 39, 100–109. [Google Scholar] [CrossRef]
- Deng, C.; Wang, S.; Huang, Z.; Tan, Z.; Liu, J. Unmanned Aerial Vehicles for Power Line Inspection: A Cooperative Way in Platforms and Communications. J. Commun. 2014, 9, 687–692. [Google Scholar] [CrossRef] [Green Version]
- Cho, J.; Lim, G.; Biobaku, T.; Kim, S.; Parsaei, H. Safety and Security Management with Unmanned Aerial Vehicle (UAV) in Oil and Gas Industry. Procedia Manuf. 2015, 3, 1343–1349. [Google Scholar] [CrossRef] [Green Version]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Pliatsios, D.; Goudos, S.K.; Lagkas, T.; Argyriou, V.; Boulogeorgos, A.A.A.; Sarigiannidis, P. Drone-Base-Station for Next-Generation Internet-of-Things: A Comparison of Swarm Intelligence Approaches. IEEE Open J. Antennas Propag. 2021, 3, 32–47. [Google Scholar] [CrossRef]
- Ballesteros, R.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Applications of Georeferenced High-Resolution Images Obtained with Unmanned Aerial Vehicles. Part I: Description of Image Acquisition and Processing. Precis. Agric. 2014, 15, 579–592. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; del Cerro, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial Remote Sensing in Agriculture: A Practical Approach to Area Coverage and Path Planning for Fleets of Mini Aerial Robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef] [Green Version]
- Maza, I.; Capitán, J.; Merino, L.; Ollero, A. Multi-UAV cooperation. In Encyclopedia of Aerospace Engineering; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2015; pp. 1–10. [Google Scholar] [CrossRef]
- Spyridis, Y.; Lagkas, T.; Sarigiannidis, P.; Zhang, J. Modelling and Simulation of a New Cooperative Algorithm for UAV Swarm Coordination in Mobile RF Target Tracking. Simul. Model. Pract. Theory 2021, 107, 102232. [Google Scholar] [CrossRef]
- Rekleitis, I.; New, A.P.; Rankin, E.S.; Choset, H. Efficient Boustrophedon Multi-Robot Coverage: An Algorithmic Approach. Ann. Math. Artif. Intell. 2008, 52, 109–142. [Google Scholar] [CrossRef] [Green Version]
- Nolan, P.; Paley, D.A.; Kroeger, K. Multi-UAS path planning for non-uniform data collection in precision agriculture. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–12. [Google Scholar] [CrossRef]
- Di Franco, C.; Buttazzo, G. Coverage Path Planning for UAVs Photogrammetry with Energy and Resolution Constraints. J. Intell. Robot. Syst. 2016, 83, 445–462. [Google Scholar] [CrossRef]
- Choset, H. Coverage for Robotics—A Survey of Recent Results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A Survey on Coverage Path Planning for Robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Valente, J.; Del Cerro, J.; Barrientos, A.; Sanz, D. Aerial Coverage Optimization in Precision Agriculture Management: A Musical Harmony Inspired Approach. Comput. Electron. Agric. 2013, 99, 153–159. [Google Scholar] [CrossRef] [Green Version]
- Paull, L.; Thibault, C.; Nagaty, A.; Seto, M.; Li, H. Sensor-Driven Area Coverage for an Autonomous Fixed-Wing Unmanned Aerial Vehicle. IEEE Trans. Cybern. 2014, 44, 1605–1618. [Google Scholar] [CrossRef]
- Xu, A.; Viriyasuthee, C.; Rekleitis, I. Optimal complete terrain coverage using an unmanned aerial vehicle. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2513–2519. [Google Scholar] [CrossRef] [Green Version]
- Fazli, P.; Davoodi, A.; Mackworth, A.K. Multi-Robot Repeated Area Coverage. Auton. Robots 2013, 34, 251–276. [Google Scholar] [CrossRef] [Green Version]
- Lawrance, N.; Sukkarieh, S. Wind Energy Based Path Planning for a Small Gliding Unmanned Aerial Vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, American Institute of Aeronautics and Astronautics, Chicago, IL, USA, 10–13 August 2009. [Google Scholar] [CrossRef]
- Felipe-García, B.; Hernández-López, D.; Lerma, J.L. Analysis of the Ground Sample Distance on Large Photogrammetric Surveys. Appl. Geomat. 2012, 4, 231–244. [Google Scholar] [CrossRef]
- Goerzen, C.; Kong, Z.; Mettler, B. A Survey of Motion Planning Algorithms from the Perspective of Autonomous UAV Guidance. J. Intell. Robot. Syst. 2009, 57, 65. [Google Scholar] [CrossRef]
- Dadkhah, N.; Mettler, B. Survey of Motion Planning Literature in the Presence of Uncertainty: Considerations for UAV Guidance. J. Intell. Robot. Syst. 2012, 65, 233–246. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Cabreira, T.; Brisolara, L.; Ferreira, P.R., Jr. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Almadhoun, R.; Taha, T.; Seneviratne, L.; Zweiri, Y. A Survey on Multi-Robot Coverage Path Planning for Model Reconstruction and Mapping. SN Appl. Sci. 2019, 1, 847. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Zhang, H.; Xu, M. The coverage problem in UAV network: A surve. In Proceedings of the Fifth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Hefei, China, 11–13 July 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Choset, H.; Pignon, P. Path Planning: The Boustrophedon Cellular Decomposition. In Proceedings of the International Conference on Field and Service Robotics, Canberra, Australia, 12 October 1997; pp. 1311–1320. [Google Scholar]
- Choset, H.; Pignon, P. Coverage path planning: The boustrophedon cellular decompositio. In Field and Service Robotics; Springer: London, UK, 1998; pp. 203–209. [Google Scholar] [CrossRef] [Green Version]
- Choset, H.; Acar, E.; Rizzi, A.A.; Luntz, J. Exact cellular decompositions in terms of critical points of Morse functions. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 3, pp. 2270–2277. [Google Scholar] [CrossRef]
- Andersen, H.L. Path Planning for Search and Rescue Mission Using Multicopters. 2014. 135. Available online: https://ntnuopen.ntnu.no/ntnu-xmlui/handle/11250/261317 (accessed on 12 December 2021).
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Zheng, X.; Jain, S.; Koenig, S.; Kempe, D. Multi-robot forest coverage. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3852–3857. [Google Scholar] [CrossRef]
- Choset, H.; Lynch, K.M.; Hutchinson, S.; Kantor, G.A.; Burgard, W. Principles of Robot Motion: Theory, Algorithms, and Implementations; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Latombe, J.-C. Robot Motion Planning; Stanford University, Kluwer Academic Publishers: New York, NY, USA, 1991. [Google Scholar]
- Oksanen, T.; Visala, A. Coverage Path Planning Algorithms for Agricultural Field Machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse Decompositions for Coverage Tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- SStein, E.; Milnor, J.W.; Spivak, M.; Wells, R.; Wells, R.; Mather, J.N. Morse Theory; Princeton University Press: Princeton, NJ, USA, 1963; ISBN 978-0-691-08008-6. [Google Scholar]
- Acar, E.U.; Choset, H.; Atkar, P.N. Complete sensor-based coverage with extended-range detectors: A hierarchical decomposition in terms of critical points and Voronoi diagrams. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 3, pp. 1305–1311. [Google Scholar] [CrossRef] [Green Version]
- Acar, E.U.; Choset, H. Sensor-Based Coverage of Unknown Environments: Incremental Construction of Morse Decompositions. Int. J. Robot. Res. 2002, 21, 345–366. [Google Scholar] [CrossRef]
- Wong, S. Qualitative Topological Coverage of Unknown Environments by Mobile Robots; The University of Auckland: Auckland, New Zealand, 2006. [Google Scholar]
- Wong, S.C.; MacDonald, B.A. Complete coverage by mobile robots using slice decomposition based on natural landmarks. In PRICAI 2004: Trends in Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2004; pp. 683–692. [Google Scholar] [CrossRef]
- Butler, Z.J.; Rizzi, A.A.; Hollis, R.L. Contact sensor-based coverage of rectilinear environments. In Proceedings of the 1999 IEEE International Symposium on Intelligent Control Intelligent Systems and Semiotics (Cat. No.99CH37014), Cambridge, MA, USA, 17 September 1999; pp. 266–271. [Google Scholar] [CrossRef]
- Moravec, H.; Elfes, A. High resolution maps from wide angle sonar. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation Proceedings, St. Louis, MO, USA, 25–28 March 1985; Volume 2, pp. 116–121. [Google Scholar] [CrossRef]
- Zelinsky, A.; Jarvis, R.A.; Byrne, J.C.; Yuta, S. Planning Paths of Complete Coverage of an Unstructured Environment by a Mobile Robot. In Proceedings of the International Conference on Advanced Robotics, Tsukuba, Japan, 11 September 1993; Volume 13, pp. 533–538. [Google Scholar]
- Shivashankar, V.; Jain, R.; Kuter, U.; Nau, D. Real-Time Planning for Covering an Initially-Unknown Spatial Environment. In Proceedings of the Twenty-Fourth International FLAIRS Conference, Palm Beach, FL, USA, 20 March 2011. [Google Scholar]
- Gabriely, Y.; Rimon, E. Spiral-STC: An on-Line Coverage Algorithm of Grid Environments by a Mobile Robot. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 954–960. [Google Scholar] [CrossRef]
- Luo, C.; Yang, S.X.; Stacey, D.A.; Jofriet, J.C. A Solution to Vicinity Problem of Obstacles in Complete Coverage Path Planning. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 612–617. [Google Scholar] [CrossRef]
- Yang, S.X.; Luo, C. A Neural Network Approach to Complete Coverage Path Planning. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 718–724. [Google Scholar] [CrossRef]
- Hazon, N.; Mieli, F.; Kaminka, G.A. Towards Robust On-Line Multi-Robot Coverage. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 1710–1715. [Google Scholar] [CrossRef]
- Luo, C.; Yang, S.X. A real-time cooperative sweeping strategy for multiple cleaning robots. In Proceedings of the of the IEEE Internatinal Symposium on Intelligent Control, Vancouver, BC, Canada, 30 October 2002; pp. 660–665. [Google Scholar] [CrossRef]
- Luo, C.; Yang, S.X.; Stacey, D.A. Real-time path planning with deadlock avoidance of multiple cleaning robots. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 3, pp. 4080–4085. [Google Scholar] [CrossRef]
- Easton, K.; Burdick, J. Inspection’. In Proceedings of the Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 727–734. [Google Scholar] [CrossRef] [Green Version]
- Ju, C.; Son, H. Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation. Electronics 2018, 7, 162. [Google Scholar] [CrossRef] [Green Version]
- Vincent, P.; Rubin, I. A framework and analysis for cooperative search using UAV swarms. In Proceedings of the 2004 ACM symposium on Applied Computing, New York, NY, USA, 14 March 2004; pp. 79–86. [Google Scholar] [CrossRef]
- Maza, I.; Ollero, A. Multiple UAV cooperative searching operation using polygon area decomposition and efficient coverage algorithms. In Distributed Autonomous Robotic Systems 6; Springer: Tokyo, Japan, 2007; pp. 221–230. [Google Scholar] [CrossRef]
- Alotaibi, E.T.; Alqefari, S.S.; Koubaa, A. LSAR: Multi-UAV Collaboration for Search and Rescue Missions. IEEE Access 2019, 7, 55817–55832. [Google Scholar] [CrossRef]
- Acevedo, J.J.; Arrue, B.C.; Maza, I.; Ollero, A. Cooperative Large Area Surveillance with a Team of Aerial Mobile Robots for Long Endurance Missions. J. Intell. Robot. Syst. 2013, 70, 329–345. [Google Scholar] [CrossRef]
- Acevedo, J.J.; Arrue, B.C.; Maza, I.; Ollero, A. Distributed Approach for Coverage and Patrolling Missions with a Team of Heterogeneous Aerial Robots under Communication Constraints. Int. J. Adv. Robot. Syst. 2013, 10, 28. [Google Scholar] [CrossRef]
- Acevedo, J.J.; Arrue, B.C.; Diaz-Bañez, J.M.; Ventura, I.; Maza, I.; Ollero, A. One-to-One Coordination Algorithm for Decentralized Area Partition in Surveillance Missions with a Team of Aerial Robots. J. Intell. Robot. Syst. 2014, 74, 269–285. [Google Scholar] [CrossRef]
- Xu, A.; Viriyasuthee, C.; Rekleitis, I. Efficient Complete Coverage of a Known Arbitrary Environment with Applications to Aerial Operations. Auton. Robots 2014, 36, 365–381. [Google Scholar] [CrossRef]
- Balampanis, F.; Maza, I.; Ollero, A. Area Decomposition, Partition and Coverage with Multiple Remotely Piloted Aircraft Systems Operating in Coastal Regions. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 275–283. [Google Scholar] [CrossRef]
- Balampanis, F.; Maza, I.; Ollero, A. Coastal Areas Division and Coverage with Multiple UAVs for Remote Sensing. Sensors 2017, 17, 808. [Google Scholar] [CrossRef] [Green Version]
- Kallmann, M.; Bieri, H.; Thalmann, D. Fully Dynamic Constrained Delaunay Triangulations. In Geometric Modeling for Scientific Visualization; Springer: Berlin/Heidelberg, Germany, 2004; pp. 241–257. [Google Scholar] [CrossRef] [Green Version]
- Shewchuk, J.R. Mesh generation for domains with small angles. In Proceedings of the Sixteenth Annual Symposium on Computational Geometry, New York, NY, USA, 1 May 2000; pp. 1–10. [Google Scholar] [CrossRef]
- Balampanis, F.; Maza, I.; Ollero, A. Spiral-like coverage path planning for multiple heterogeneous UAS operating in coastal regions. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 617–624. [Google Scholar] [CrossRef]
- Balampanis, F.; Maza, I.; Ollero, A. Area Partition for Coastal Regions with Multiple UAS. J. Intell. Robot. Syst. 2017, 88, 751–766. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Brown, T.X.; Bettstetter, C. Multi-objective UAV path planning for search and rescue. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5569–5574. [Google Scholar] [CrossRef]
- Trujillo, M.M.; Darrah, M.; Speransky, K.; DeRoos, B.; Wathen, M. Optimized flight path for 3D mapping of an area with structures using a multirotor. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 905–910. [Google Scholar] [CrossRef]
- Darrah, M.; Trujillo, M.M.; Speransky, K.; Wathen, M. Optimized 3D mapping of a large area with structures using multiple multirotors. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 716–722. [Google Scholar] [CrossRef]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage Path Planning with Unmanned Aerial Vehicles for 3D Terrain Reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Coombes, M.; Chen, W.-H.; Liu, C. Boustrophedon Coverage Path Planning for UAV Aerial Surveys in Wind. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1563–1571. [Google Scholar] [CrossRef] [Green Version]
- Coombes, M.; Fletcher, T.; Chen, W.-H.; Liu, C. Optimal Polygon Decomposition for UAV Survey Coverage Path Planning in Wind. Sensors 2018, 18, 2132. [Google Scholar] [CrossRef] [Green Version]
- Cabreira, T.M.; Franco, C.D.; Ferreira, P.R.; Buttazzo, G.C. Energy-Aware Spiral Coverage Path Planning for UAV Photogrammetric Applications. IEEE Robot. Autom. Lett. 2018, 3, 3662–3668. [Google Scholar] [CrossRef]
- Di Franco, C.; Buttazzo, G. Energy-Aware Coverage Path Planning of UAVs. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015; pp. 111–117. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Wang, X.; Sun, T. Energy-Optimal Coverage Path Planning on Topographic Map for Environment Survey with Unmanned Aerial Vehicles. Electron. Lett. 2016, 52, 699–701. [Google Scholar] [CrossRef]
- Artemenko, O.; Dominic, O.J.; Andryeyev, O.; Mitschele-Thiel, A. Energy-aware trajectory planning for the localization of mobile devices using an unmanned aerial vehicle. In Proceedings of the 2016 25th International Conference on Computer Communication and Networks (ICCCN), Waikoloa, HI, USA, 1–4 August 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Ahmadzadeh, A.; Keller, J.; Pappas, G.; Jadbabaie, A.; Kumar, V. An optimization-based approach to time-critical cooperative surveillance and coverage with UAVs. In Experimental Robotics: The 10th International Symposium on Experimental Robotics; Khatib, O., Kumar, V., Rus, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 491–500. [Google Scholar] [CrossRef]
- Araujo, J.F.; Sujit, P.B.; Sousa, J.B. Multiple UAV area decomposition and coverage. In Proceedings of the 2013 IEEE Symposium on Computational Intelligence for Security and Defense Applications (CISDA), Singapore, 16–19 April 2013; pp. 30–37. [Google Scholar] [CrossRef]
- Majeed, A.; Lee, S. A New Coverage Flight Path Planning Algorithm Based on Footprint Sweep Fitting for Unmanned Aerial Vehicle Navigation in Urban Environments. Appl. Sci. 2019, 9, 1470. [Google Scholar] [CrossRef] [Green Version]
- Majeed, A.; Hwang, S.O. A Multi-Objective Coverage Path Planning Algorithm for UAVs to Cover Spatially Distributed Regions in Urban Environments. Aerospace 2021, 8, 343. [Google Scholar] [CrossRef]
- Cheng, C.-T.; Fallahi, K.; Leung, H.; Tse, C.K. Cooperative Path Planner for UAVs Using ACO Algorithm with Gaussian Distribution Functions. In Proceedings of the 2009 IEEE International Symposium on Circuits and Systems, Taipei, Taiwan, 24–27 May 2009; pp. 173–176. [Google Scholar] [CrossRef]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility Models for UAV Group Reconnaissance Applications. In Proceedings of the 2006 International Conference on Wireless and Mobile Communications (ICWMC’06), Bucharest, Romania, 29–31 July 2006; p. 33. [Google Scholar] [CrossRef]










| Related Work | Decomposition Methods | Multi-Robot Strategies | UAV CPP Methods | Multi-UAV CPP Methods | Energy-Saving Algorithms | Comparison of Energy-Saving CPP Methods |
|---|---|---|---|---|---|---|
| Cabreira et al. [30] | ✓ | ✕ | ✓ | ✓ | ✓ | ✕ |
| Galceran and Carreras [20] | ✓ | ✓ | ✕ | ✕ | ✕ | ✕ |
| Almandhoun et al. [31] | ✓ | ✓ | ✕ | ✓ | ✕ | ✕ |
| Chen et al. [32] | ✕ | ✕ | ✓ | ✓ | ✕ | ✕ |
| Our work | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| CPP Method | Energy-Saving Approach | Type of UAV | Reference |
|---|---|---|---|
| Energy gain path | Energy exploitation of the wind | Fixed-wing | [25] |
| Back and Forth | Reducing the number of turns and the total flying path | Rotorcraft | [76] |
| Boustrophedon | The direction of the UAV path and the turns according to the wind direction | Fixed-wing | [77] |
| Back and Forth | Altitude maximization according to the Ground Sample Distance to reduce the number of turns | Rotorcraft | [18] |
| Spiral | Wider angle turns to minimize the acceleration and deceleration | Rotorcraft | [79] |
| Three stages energy optimal path | An energy-aware algorithm computes the take-off weight, flight speed, and air friction to generate an energy-optimal path | Rotorcraft | [81] |
| Smoothing turns | Smoothing the turns on a given path to minimize deceleration and acceleration before and after the turning point | Rotorcraft/Fixed-wing | [82] |
| Circular and straight lines with left turns paths | Cooperative coverage algorithm with critical time | Multiple Fixed-wing | [83] |
| Back and Forth | Minimizing the number of stripes and eventually the number of turns | Multiple Fixed-wing | [84] |
| Back and Forth | Reduce computational time, the number of turns, and path overlapping while minimizing the total coverage path | Rotorcraft | [85] |
| Back and Forth | Reducing the computational time and path length for the inter-regional path, the number of turning maneuvers, and path overlapping | Rotorcraft | [86] |
| ACO with Gaussian distribution functions | Path length, rotation angle and area overlapping rate | Rotorcraft/Fixed-wing | [87] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fevgas, G.; Lagkas, T.; Argyriou, V.; Sarigiannidis, P. Coverage Path Planning Methods Focusing on Energy Efficient and Cooperative Strategies for Unmanned Aerial Vehicles. Sensors 2022, 22, 1235. https://doi.org/10.3390/s22031235
Fevgas G, Lagkas T, Argyriou V, Sarigiannidis P. Coverage Path Planning Methods Focusing on Energy Efficient and Cooperative Strategies for Unmanned Aerial Vehicles. Sensors. 2022; 22(3):1235. https://doi.org/10.3390/s22031235
Chicago/Turabian StyleFevgas, Georgios, Thomas Lagkas, Vasileios Argyriou, and Panagiotis Sarigiannidis. 2022. "Coverage Path Planning Methods Focusing on Energy Efficient and Cooperative Strategies for Unmanned Aerial Vehicles" Sensors 22, no. 3: 1235. https://doi.org/10.3390/s22031235
APA StyleFevgas, G., Lagkas, T., Argyriou, V., & Sarigiannidis, P. (2022). Coverage Path Planning Methods Focusing on Energy Efficient and Cooperative Strategies for Unmanned Aerial Vehicles. Sensors, 22(3), 1235. https://doi.org/10.3390/s22031235