
A Semi-Supervised 3D Indoor Localization Using Multi-Kernel Learning for WiFi Networks




Abstract
:1. Introduction
- A semi-supervised localization scheme, which only needs to collect a few labeled signals of RSS and SNR, is proposed in this paper.
- A multi-kernel learning scheme with weight adjustment and optimization for 3D indoor localization in WiFi networks is proposed in this paper so as to further improve the accuracy of localization.
- Experimental results demonstrate that the proposed localization scheme performs better than the multi-DNN scheme and the existing kernel-based localization schemes in terms of localization accuracy and error.
2. Related Work
2.1. Traditional RSSI-Based Localization Schemes
2.2. Fingerprint-Based Localization
2.3. Kernel-Based Localization
2.4. 3D Localziation
2.5. Motivation
3. Preliminaries
3.1. System Architecture
3.2. Problem Formulation
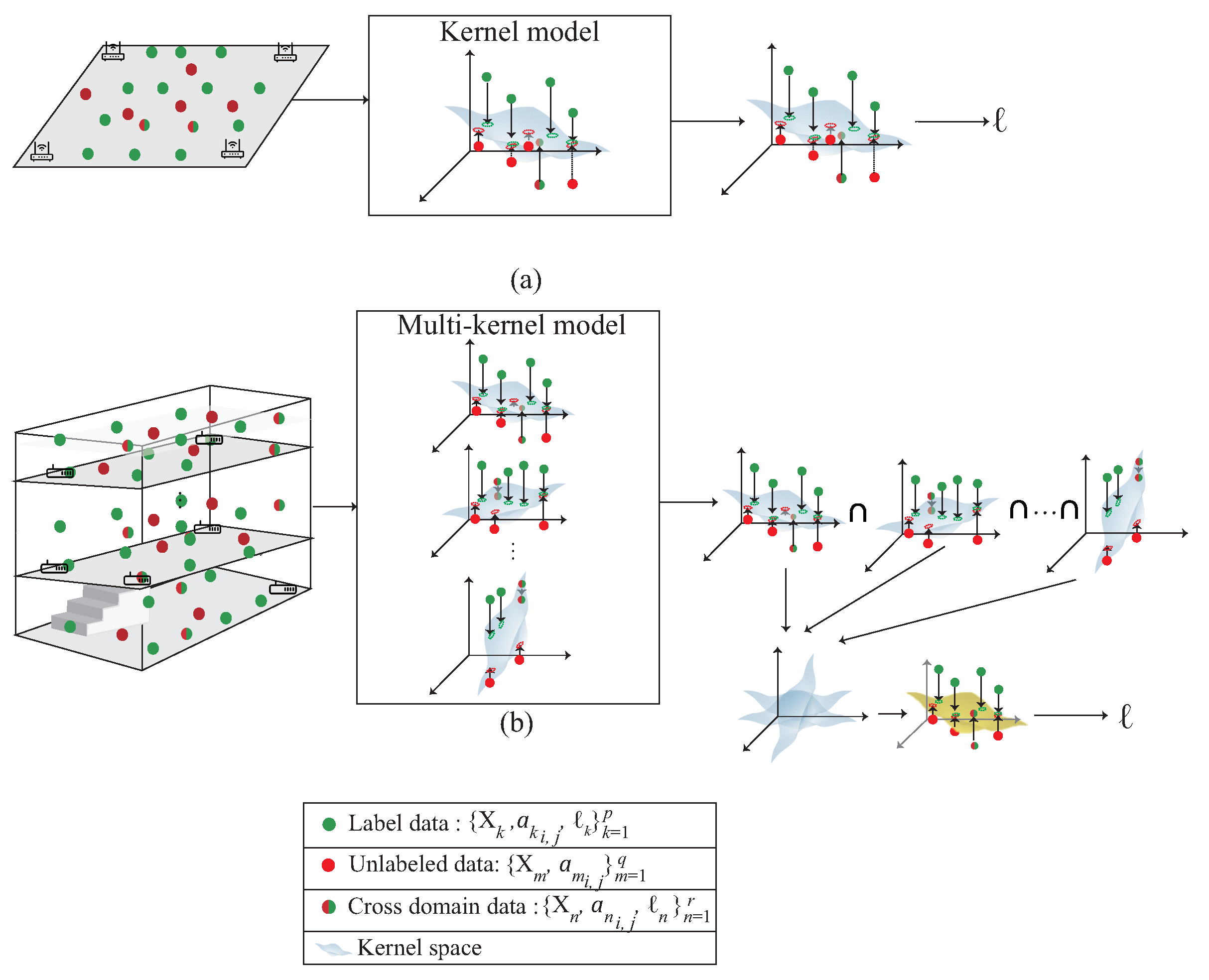
3.3. Comparison with the Single Kernel Scheme
4. A 3D Multi-Kernel Learning Approach for 3D Indoor Localization
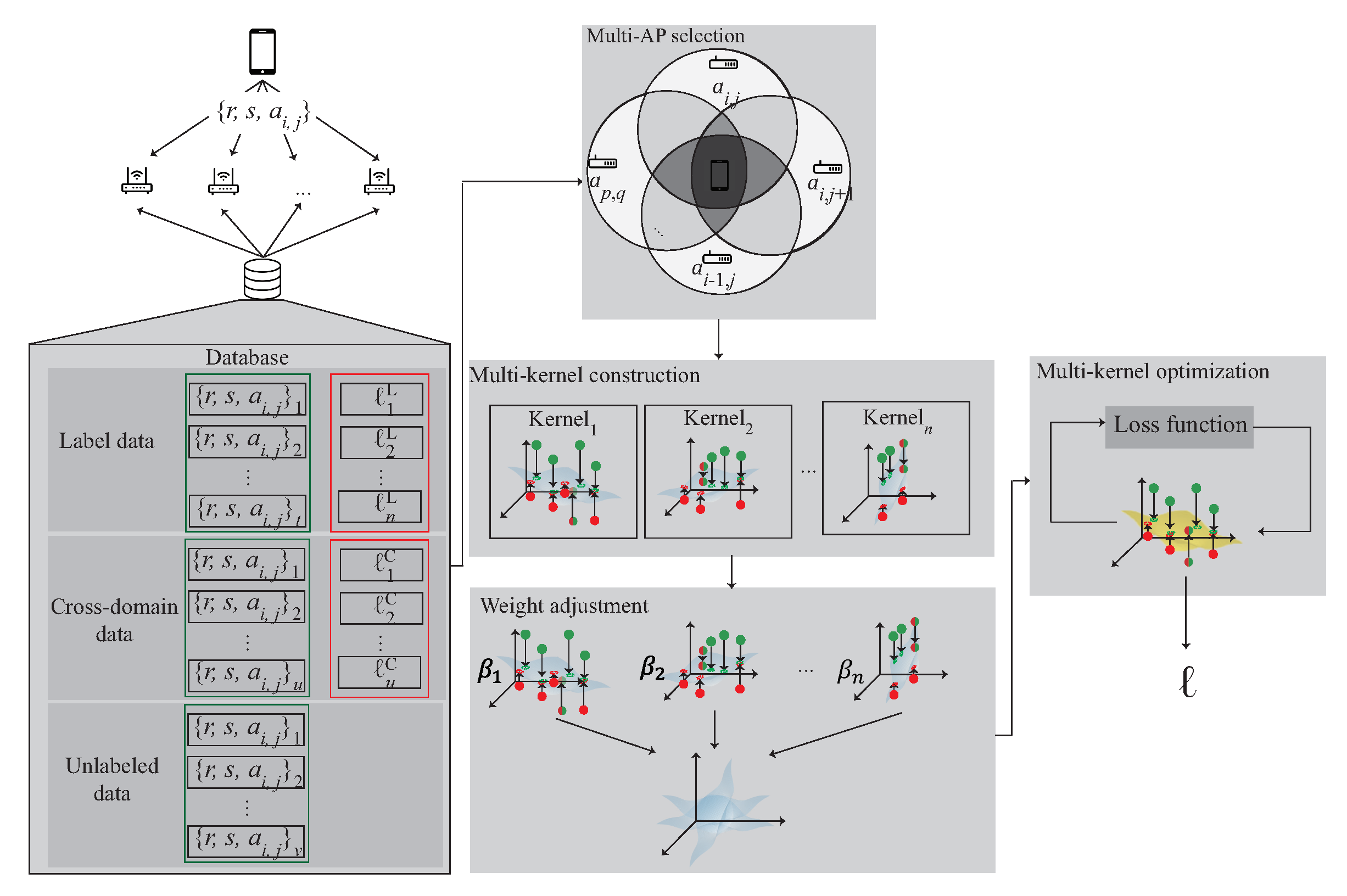
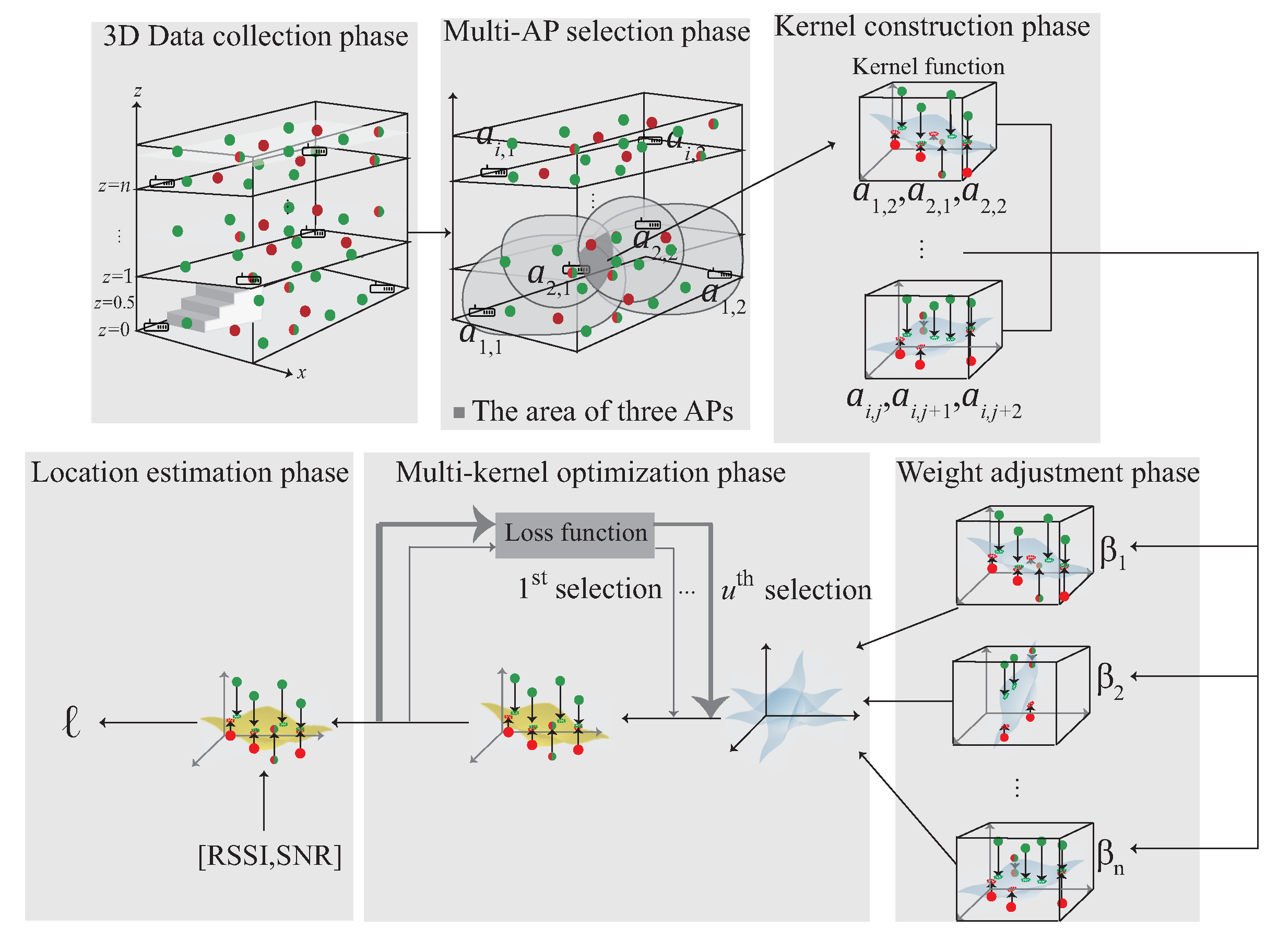
- (1)
- 3D data collection phase: During the data collection stage, the data collected in the 3D environment is divided into , and . The indicates that the data are in source domain and indicates the unlabeled data. is the intersection of and and can be represented as . The collected data are used to choose multiple APs in the next phase.
- (2)
- Multi-AP selection phase: In order to learn the signal distribution generated by each AP, the multi-AP selection phase is proposed. In this phase, according to the signal obtained by the user at the area of interest, select multiple APs near the user. The selected APs form the kernels in the next phase.
- (3)
- 3D Multi-kernel construction phase: In order to find the corresponding signal plane between multiple APs, the multi-kernel construction phase is proposed to solve this problem. In this phase, the selected APs are used to form the kernel model. The data, include , and , which located in the area of the intersection between multiple APs is input to the kernel function to form the high-dimensional data. By Mercer’s theorem, the plane between multiple APs is built. The plane is adjusted by the next phase.
- (4)
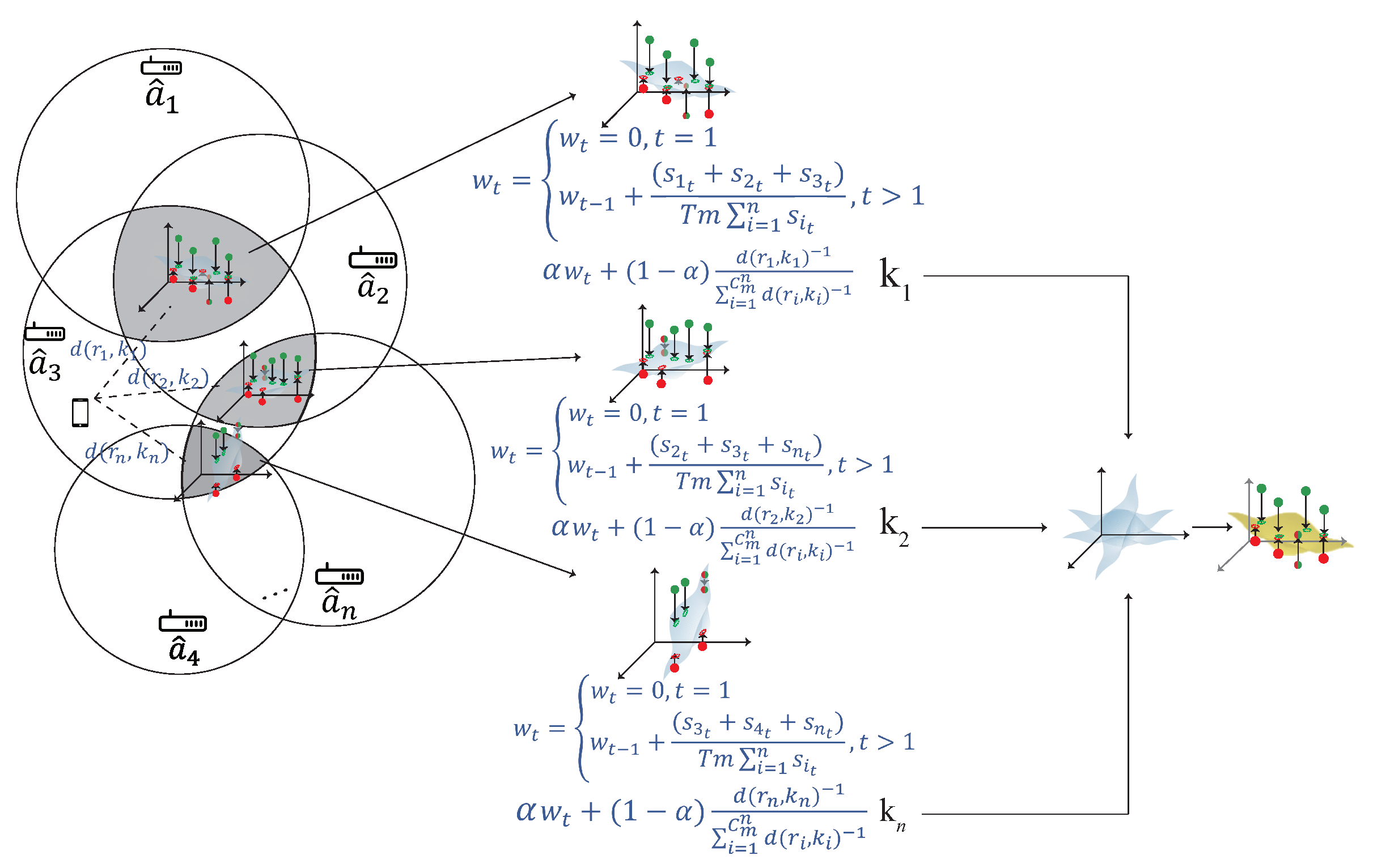
- Weight adjustment phase: After constructing multiple kernels, the kernel closer to the user is more accurate, therefore, the weight adjustment phase is proposed to determine the weight of each kernel. In this phase, the distance and the SNR between the kernel and the user is measured. If the kernel is closer to the user, the kernel gains a larger weight. The weight of the kernel is optimized in the next phase.
- (5)
- The multi-kernel optimization phase: After giving the weight to each kernel, the area responsible for each kernel is combined according to the weight to form an expected kernel . In order to reduce the distribution between the source kernel and , the multi-kernel optimization phase is proposed to solve this problem.
- (6)
- Location estimation phase: After multi-kernel optimization phase, the expected kernel is constructed and used for location estimation.
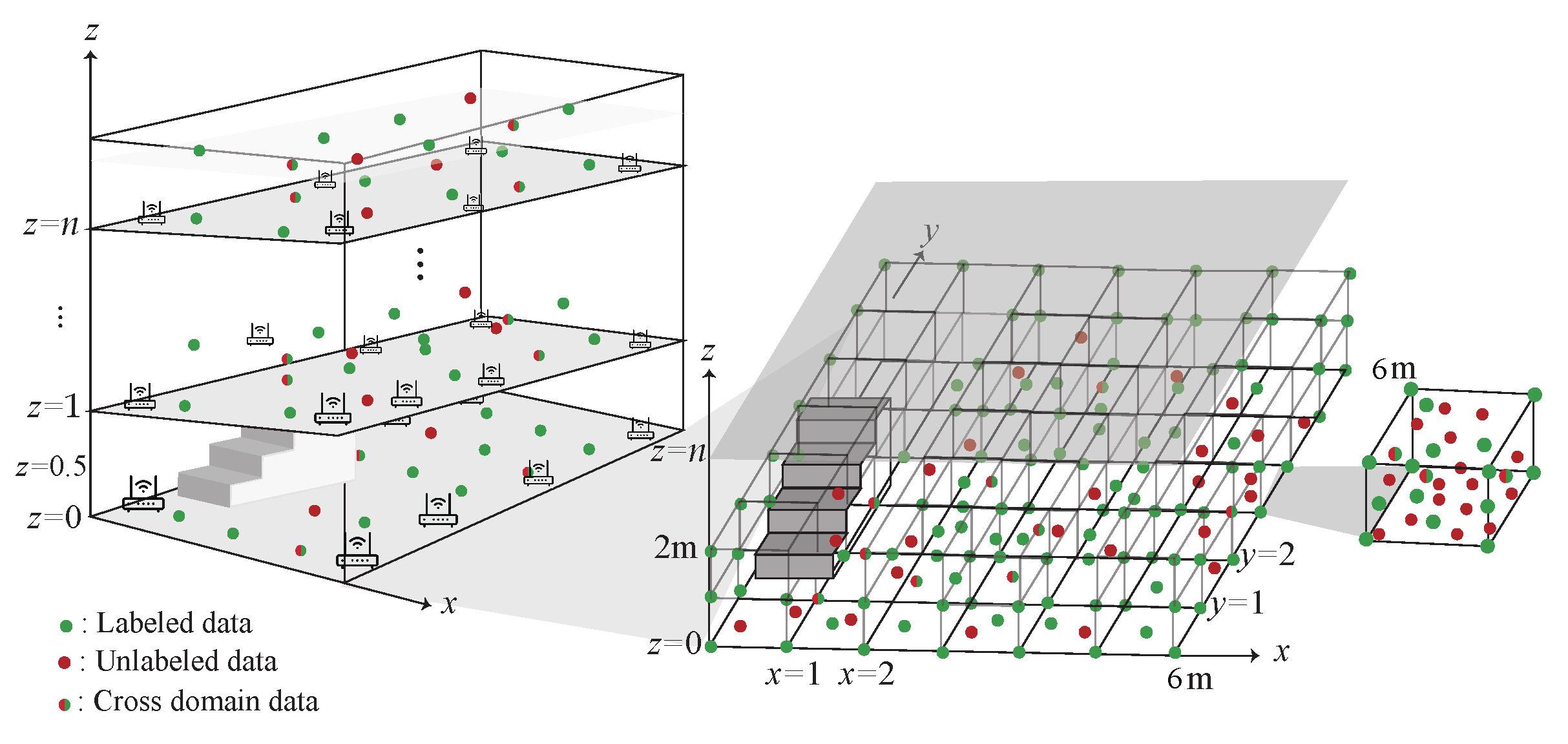
4.1. 3D data Collection Phase
- S1.
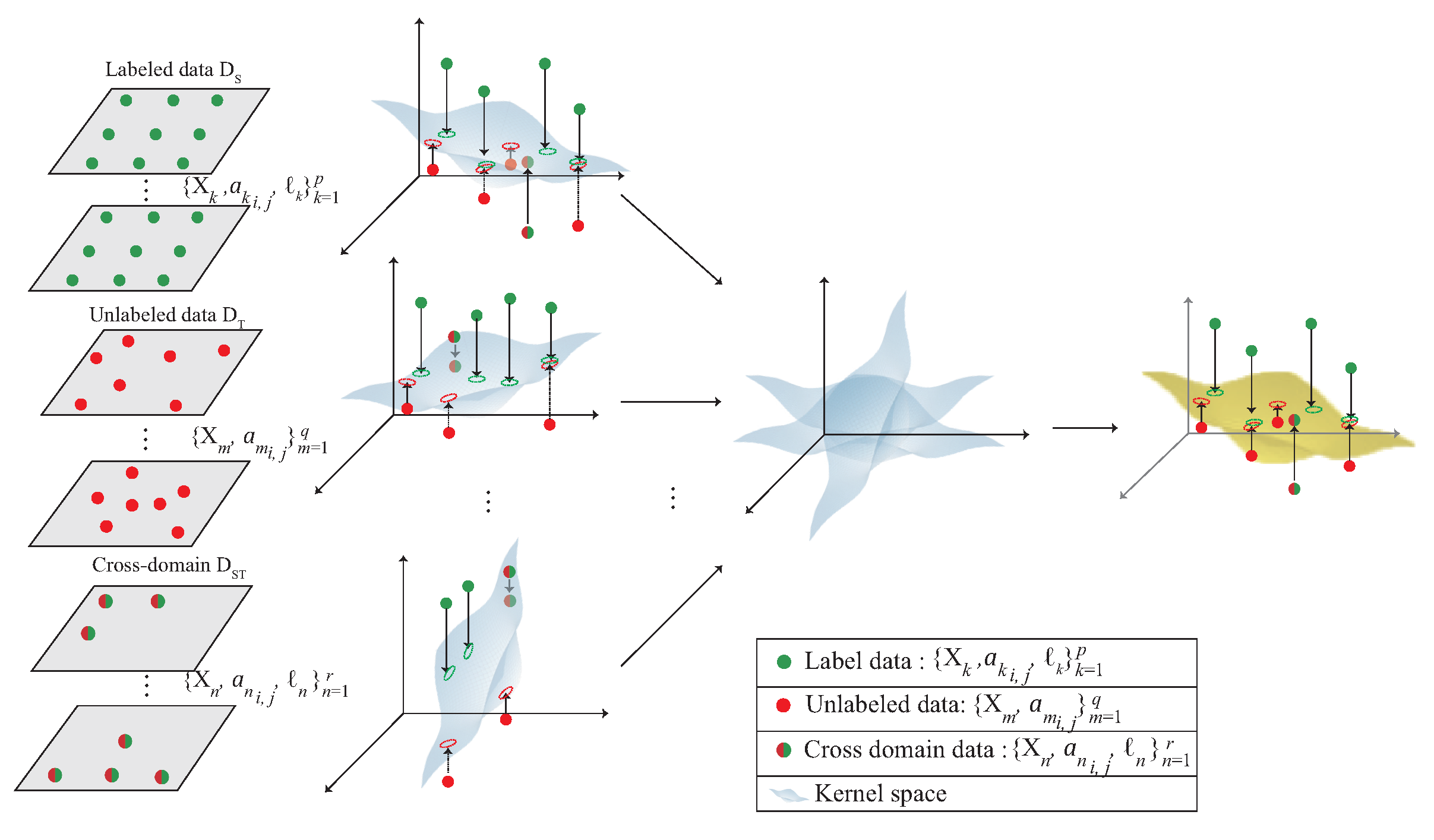
- The data collected in each cube is separated into labeled data (), unlabeled data () and the cross-domain data (). denotes the labeled data which is collected at the eight corners of the cube with , and the signal collected at the j-th AP on the i-th floor and the corresponding labeled data , respectively.
- S2.
- denotes the unlabeled data which is collected randomly at each cube with , and the signal collected at the j-th AP on the i-th floor, respectively.
- S3.
- indicates the cross-domain data with , and the signal collected at the j-th AP on the i-th floor, which is the intersection of and and can be represented as .
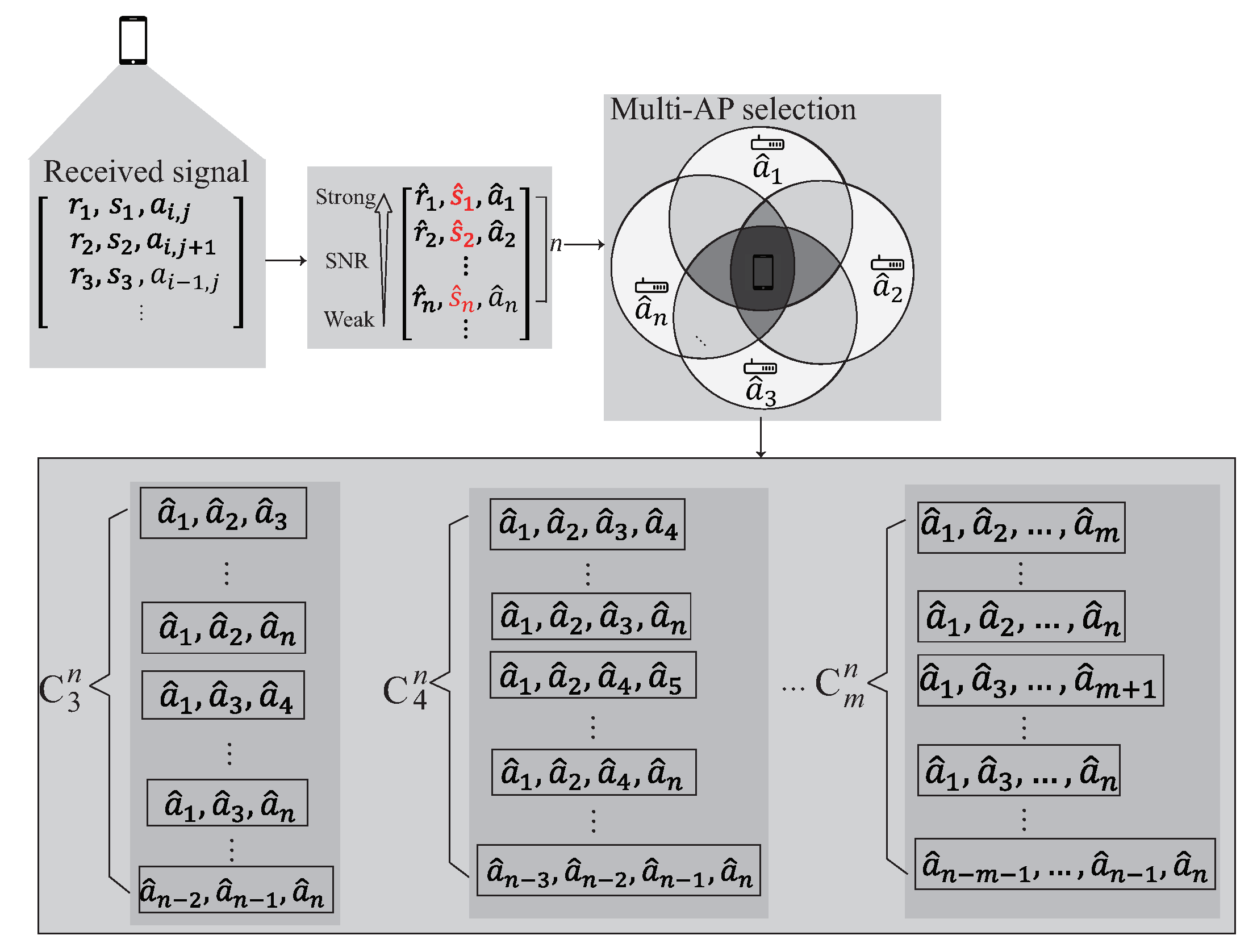
4.2. Multi-AP Selection Phase
- S1.
- The collected signals are arranged in descending order according to the value of and stored into Q. Q can be represented as , , where k is the number of data set candidates which can be collected at the reference point.
- S2.
- According to the signals stored in Q, choose the first n signals from Q, where , is the n best signals which can be heard at the reference point. The intersection between each AP’s transmission range have different signal distribution. In order to learn the signal distribution generated by each AP, each element in Q is permutation to select multiple APs whose signal is within the n best signals and stored in cluster C.
- S3.
- The cluster C can be represented as , where m represents the number of AP groups. In the following phase, each component of the cluster is operated separately to form the kernel.
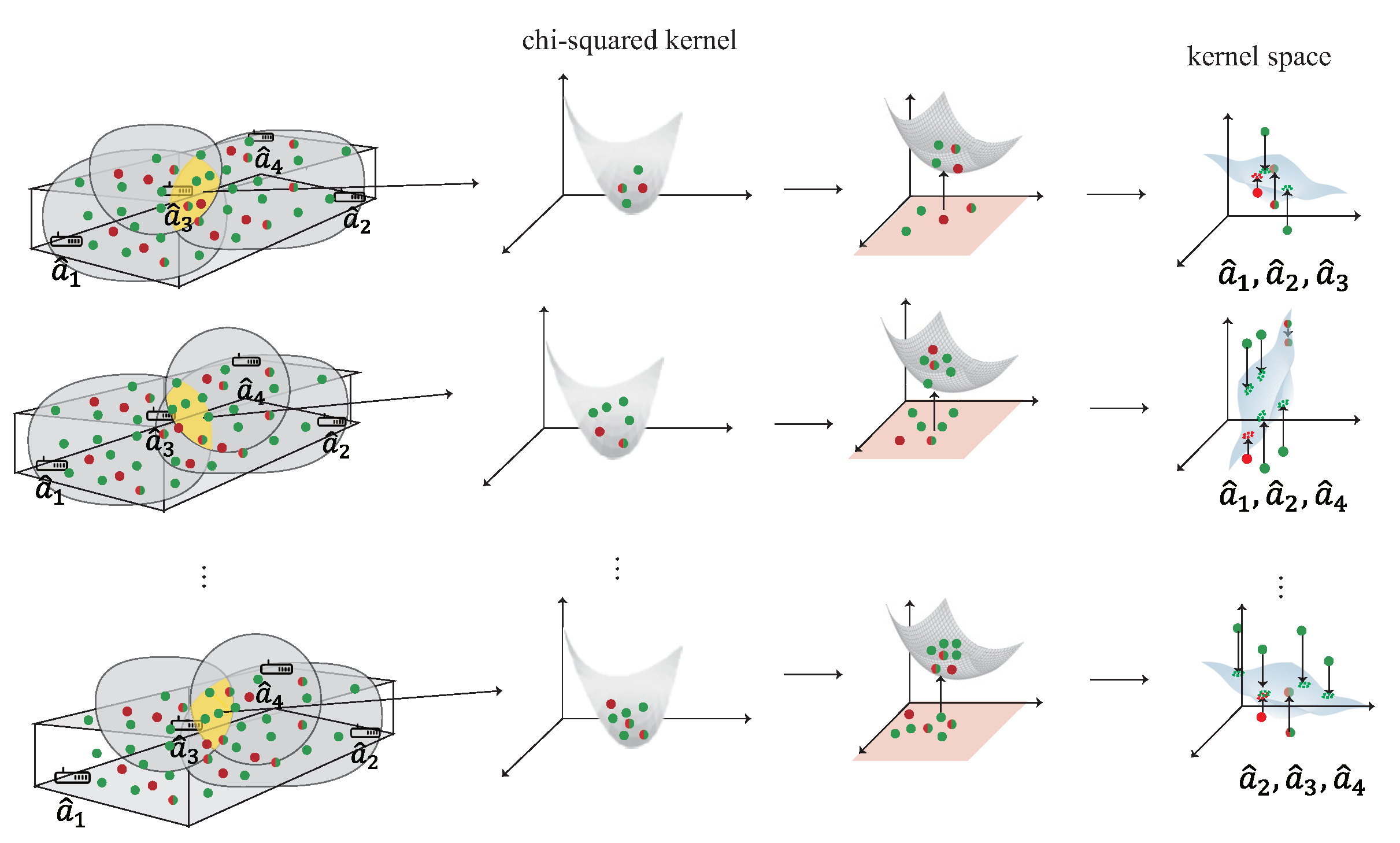
4.3. Multi-Kernel Construction Phase
- S1.
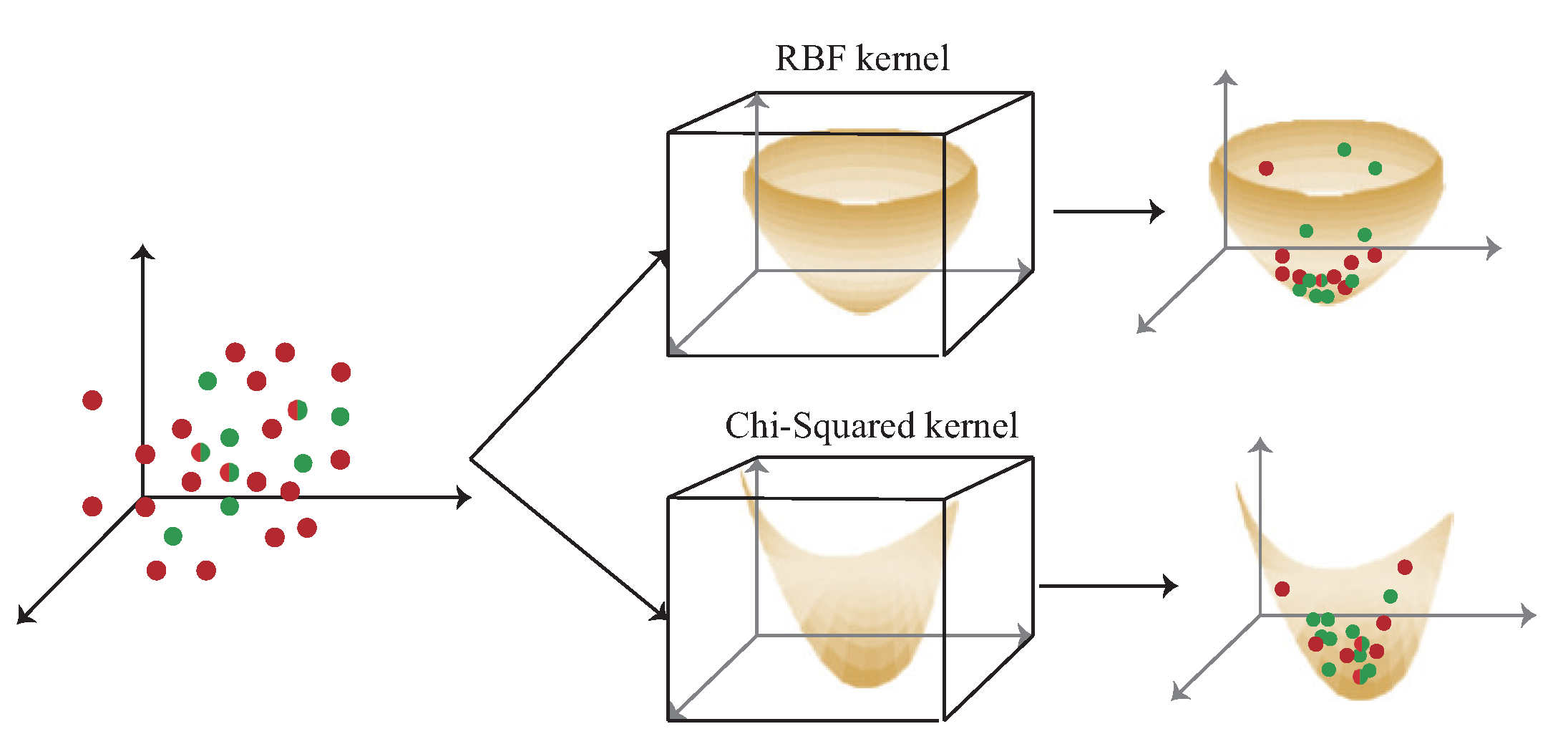
- The first step is to calculate the source kernel and the target kernel using the kernel function, such as chi-squared kernel . The cross-domain kernel , from the common area between and , are also using the chi-squared kernel.
- S2.
- In order to evaluate the distribution difference between and in the space of Hilbert, the second step is to compute the difference of distribution between the source kernel and the target kernel. However, since and have distinct dimensions, that is and , the difference between and cannot be directly estimated. In order to solve the problem of different dimensions, an extrapolated kernel is constructed using the eigensystem . The target eigenvector matrix and the target eigenvalue matrix can be constructed using the standard problem of eigenvalue .
- S3.
- After calculated eigensystem and the cross-domain kernel , the extrapolated source kernel of the eigenvector matrix is calculated by the Mercer’s theorem as .
- S4.
- After S3, the new source kernel is constructed from the eigenvectors of the target kernel, where . In the next phase, each kernel is given a weight according to the distance and the SNR value between the user and the kernel.
| Algorithm 1: The multi-kernel construction phase |
 |
4.4. The Weight Adjustment Phase
- S1.
- The distance between the user and AP can be calculated by , where P is the measured power from , n is the environment factor.
- S2.
- The distance between the user and the kernel can be calculated by , where R represent the corresponding RSS to form the kernel k. For example, if kernel k is formed by , then , where , and denotes the RSS that the user received from and , respectively.
- S3.
- The SNR signal strength can be calculated by , where T denotes the length of time, is the sum of the corresponding SNR signal to form the kernel model k, and m represents the number of AP. For example, if kernel model k is formed by ,,, then , where , and denotes the SNR that the user received from and .
- S4.
- The weight of each kernel can be determined by , where . If the kernel is closer to the user, the kernel has a larger weight and if the kernel is farther to the user, the kernel has a smaller weight. In order to formalize the distribution discrepancy between the new source kernel and the ground truth source kernel , the multi-kernel optimization is used in the next phase to solve this problem.
| Algorithm 2: The weight adjustment phase |
 |
4.5. The Multi-Kernel Optimization Learning Phase
- S1.
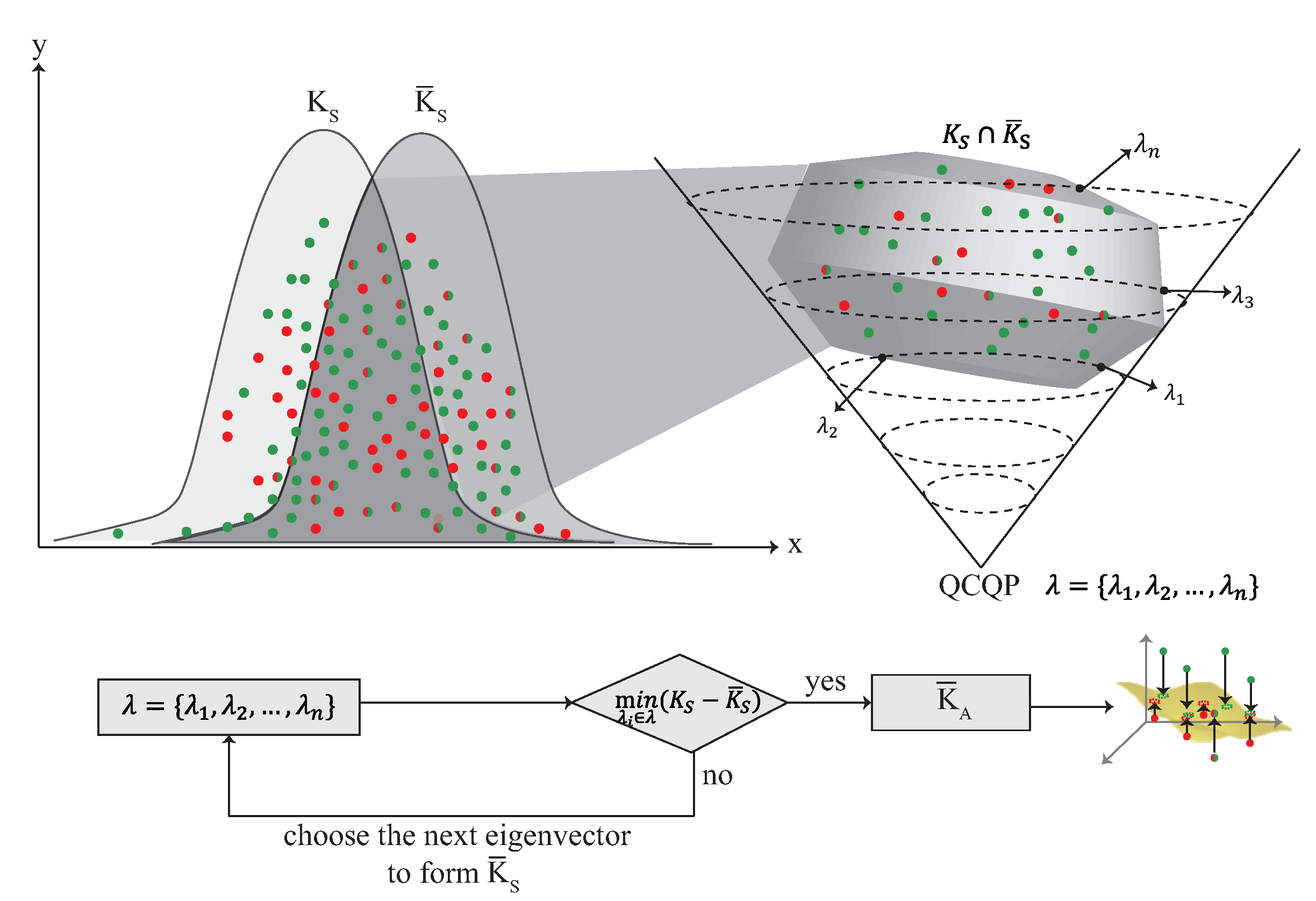
- In order to minimize the difference between and , the QCQP optimization is used which is described as , where are the n nonnegative eigen-spectrum parameters.
- S2.
- The QCQP optimization is used to derive the intersection between and in the high dimension. The crossover point in is found by QCQP optimization, where .
- S3.
- The goal of the multi-kernel optimization phase is to find a that can minimize the difference between and . In this step, is calculated by , where is the eigenvector matrix and is the eigenvalue matrix. is constructed with which has the minimized distribution of .
4.6. Location Estimation Phase
- S1.
- After is constructed in multi-kernel optimization learning, the user’s location can be estimated by according to the signal received by user.
- S2.
- The user’s location can be denoted as , where represents the n best signals received by the user.
5. Experiment Results
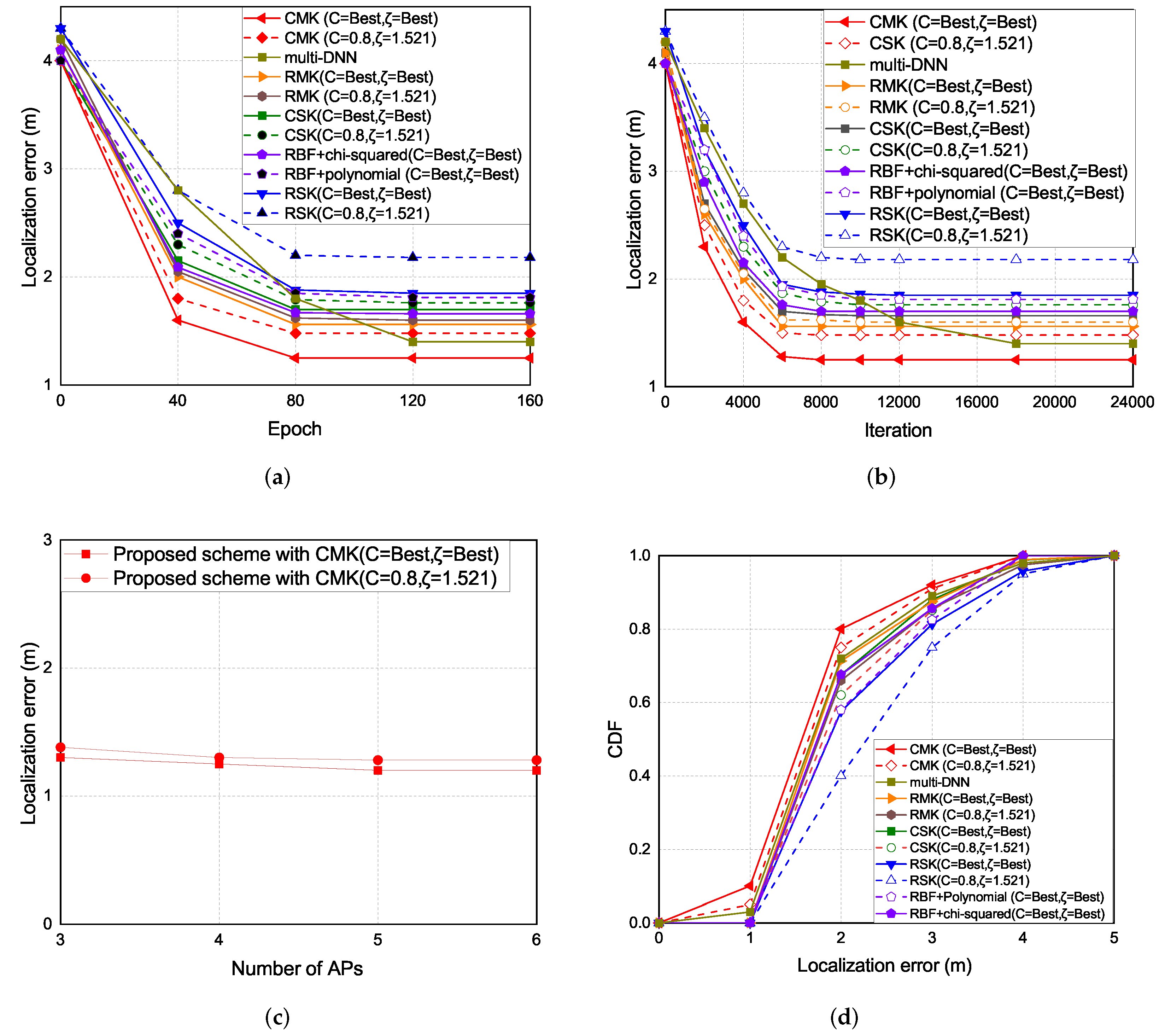
- Localization error: The average difference between the real location and the estimated location.
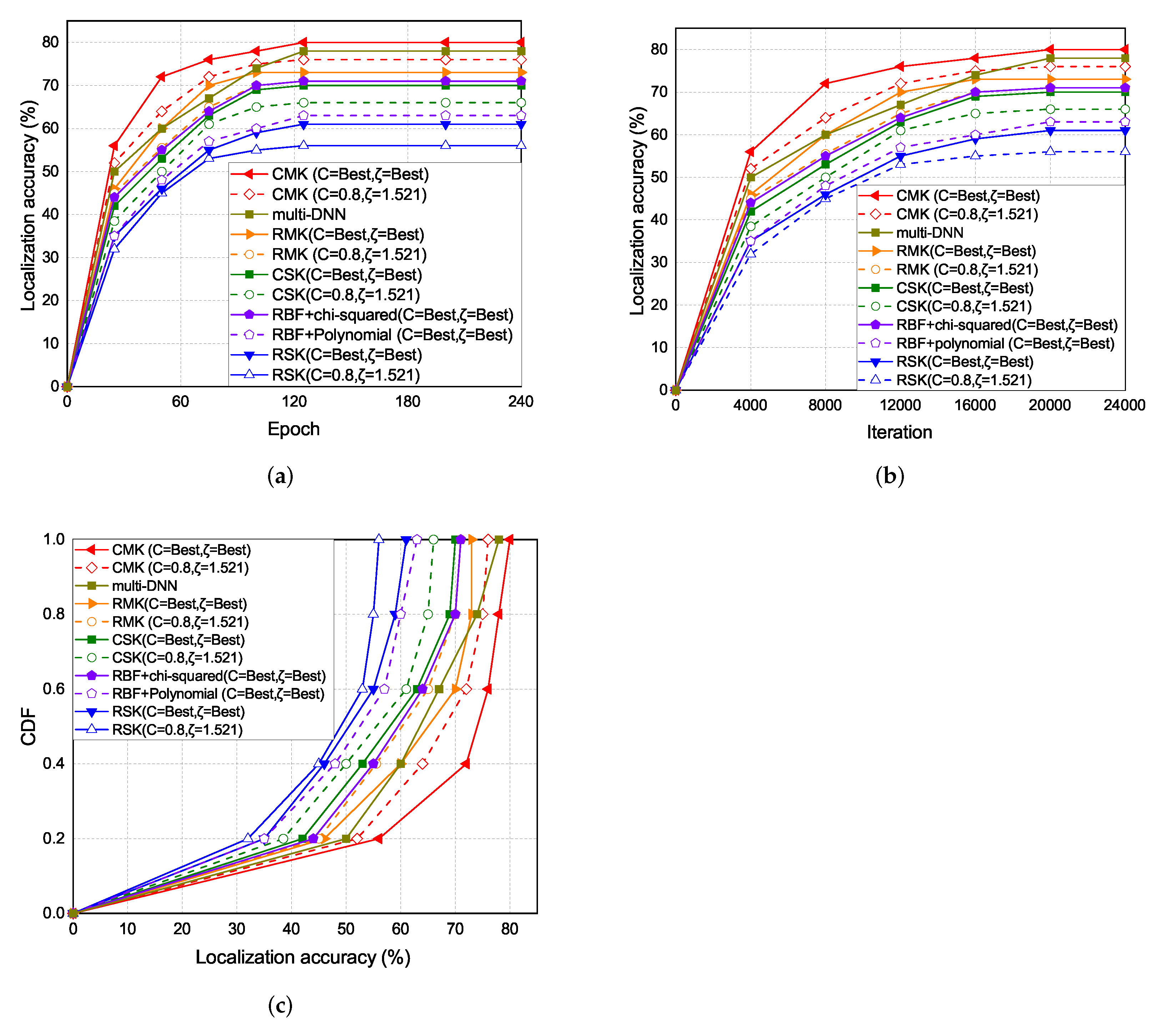
- Localization accuracy: The ratio that the estimated location is located at the same cube as the real location.
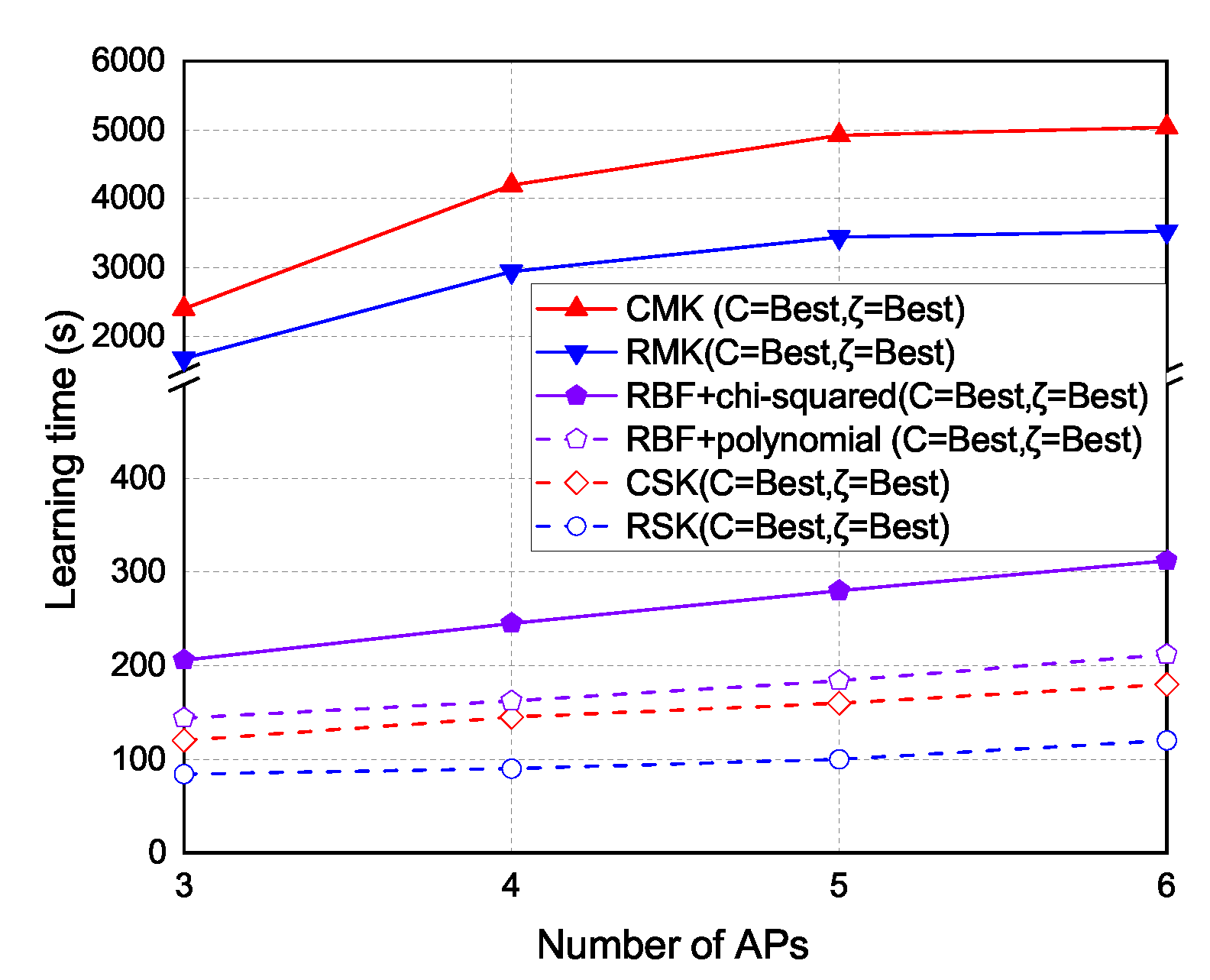
- Learning time: The time it takes to form each kernel.
5.1. Localization Error
5.2. Localization Accuracy
5.3. Time Cost
5.4. Discussions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tzitzis, A.; Megalou, S.; Siachalou, S.; Tsardoulias, E.; Yioultsis, T. 3D Localization of RFID Tags with a Single Antenna by a Moving Robot and Phase ReLock. In Proceedings of the IEEE International Conference on RFID Technology and Applications, Pisa, Italy, 25–27 September 2019. [Google Scholar]
- Wu, J.; Zhu, M.; Xiao, B.; Qiu, Y. The Improved Fingerprint-Based Indoor Localization with RFID/PDR/MM Technologies. In Proceedings of the IEEE 24th International Conference on Parallel and Distributed Systems (ICPADS 2018), Singapore, 11–13 December 2018. [Google Scholar]
- Cheng, S.; Wang, S.; Guan, W.; Xu, H.; Li, P. 3DLRA: An RFID 3D Indoor Localization Method Based on Deep Learning. Sensors 2020, 20, 2731. [Google Scholar] [CrossRef] [PubMed]
- Ha, G.Y.; Seo, S.B.; Oh, H.S.; Jeon, W.S. LoRa ToA-Based Localization Using Fingerprint Method. In Proceedings of the International Conference on Information and Communication Technology Convergence (ICTC 2019), Jeju Island, Korea, 16–18 October 2019. [Google Scholar]
- Abbas, M.; Elhamshary, M.; Rizk, H. WiDeep: WiFi-based Accurate and Robust Indoor Localization System using Deep Learning. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications (PerCom 2019), Kyoto, Japan, 11–15 March 2019. [Google Scholar]
- Anzum, N.; Afroze, S.F.; Rahman, A. Zone-Based Indoor Localization Using Neural Networks: A View from a Real Testbed. In Proceedings of the IEEE International Conference on Communications (ICC 2018), Kansas City, MO, USA, 20–24 May 2018. [Google Scholar]
- Chang, R.Y.; Liu, S.J.; Cheng, Y.K. Device-Free Indoor Localization Using Wi-Fi Channel State Information for Internet of Things. In Proceedings of the IEEE Global Communications Conference (GLOBECOM 2018), Abu Dhabi, United Arab Emirates, 9–13 December 2018. [Google Scholar]
- Jiang, H.; Peng, C.; Sun, J. Deep Belief Network for Fingerprinting-Based RFID Indoor Localization. In Proceedings of the IEEE International Conference on Communications (ICC 2019), Shanghai, China, 20–24 May 2019. [Google Scholar]
- Zhang, L.; Wang, H. Fingerprinting-based Indoor Localization with Relation Learning Network. In Proceedings of the IEEE/CIC International Conference on Communications in China (ICCC 2019), Changchun, China, 11–13 August 2019. [Google Scholar]
- Hsu, C.S.; Chen, Y.S.; Juang, T.Y.; Wu, Y.T. An Adaptive Wi-Fi Indoor Localization Scheme using Deep Learning. In Proceedings of the IEEE Asia-Pacific Conference on Antennas and Propagation (APCAP 2018), Auckland, New Zealand, 5–8 August 2018. [Google Scholar]
- Qi, Q.; Li, Y.; Wu, Y.; Wang, Y.; Yue, Y.; Wang, X. RSS-AOA-Based Localization via Mixed Semi-Definite and Second-Order Cone Relaxation in 3-D Wireless Sensor Networks. IEEE Access 2019, 7, 117768–117779. [Google Scholar] [CrossRef]
- Cramariuc, A.; Huttunen, H.; Lohan, E.S. Clustering benefits in mobile-centric WiFi positioning in multi-floor buildings. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS 2016), Barcelona, Spain, 28–30 June 2016. [Google Scholar]
- Zanca, G.; Zorzi, F.; Zanella, A.; Zorzi, M. Experimental comparison of RSSI-based localization algorithms for indoor wireless sensor networks. In Proceedings of the Workshop on Real-World Wireless Sensor Networks, Glasgow, UK, 1 April 2008; pp. 1–5. [Google Scholar]
- Wu, G.; Tseng, P. A Deep Neural Network Based Indoor Positioning Method Using Channel State Information. In Proceedings of the International Conference on Computing, Networking and Communications (ICCNC 2018), Maui, HI, USA, 5–8 March 2018; pp. 290–294. [Google Scholar]
- Yan, J.; Zhao, L.; Tang, J.; Chen, Y. Hybrid Kernel Based Machine Learning Using Received Signal Strength Measurements for Indoor Localization. IEEE Trans. Veh. Technol. 2018, 67, 2824–2829. [Google Scholar] [CrossRef]
- Mari, S.K.; Kiong, L.C.; Loong, H.K. A Hybrid Trilateration and Fingerprinting Approach for Indoor Localization Based on WiFi. In Proceedings of the Fourth International Conference on Advances in Computing, Communication and Automation (ICACCA 2018), Subang Jaya, Malaysia, 26–28 October 2018; pp. 1–6. [Google Scholar]
- Zou, H.; Zhou, Y.; Jiang, H.; Huang, B.; Xie, L.; Spanos, C. Adaptive Localization in Dynamic Indoor Environments by Transfer Kernel Learning. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC 2017), San Francisco, CA, USA, 19–22 March 2017. [Google Scholar]
- Wen, F.; Liu, P.; Wei, H. Joint Azimuth, Elevation, and Delay Estimation for 3-D Indoor Localization. IEEE Trans. Veh. Technol. 2018, 67, 4248–4261. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Y.; Tian, L. TOA-based NLOS error mitigation algorithm for 3D indoor localization. China Commun. 2020, 17, 63–72. [Google Scholar] [CrossRef]
- Marques, N.; Meneses, F.; Moreira, A. Combining similarity functions and majority rules for multi-building, multi-floor, WiFi positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–6. [Google Scholar]
- Chen, D.G.; Wang, H.Y.; Tsang, E.C. Generalized Mercer theorem and its application to feature space related to indefinite kernels. In Proceedings of the International Conference on Machine Learning and Cybernetics, Kunming, China, 12–15 July 2008; pp. 1–6. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The source domain | |
| The target domain | |
| The cross-domain | |
| The three tuples, which represent the m-th RSSI, SNR signal and received from the j-th AP on the i-th floor | |
| The source kernel | |
| The target kernel | |
| The cross domain kernel | |
| C | The cluster which AP is selected |
| The extrapolated source kernel | |
| The estimated location through 3D multi-kernel learning phase | |
| ℓ | The target’s eigenvalue |
| The weight of each kernel |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.-S.; Hsu, C.-S.; Chung, R.-S. A Semi-Supervised 3D Indoor Localization Using Multi-Kernel Learning for WiFi Networks. Sensors 2022, 22, 776. https://doi.org/10.3390/s22030776
Chen Y-S, Hsu C-S, Chung R-S. A Semi-Supervised 3D Indoor Localization Using Multi-Kernel Learning for WiFi Networks. Sensors. 2022; 22(3):776. https://doi.org/10.3390/s22030776
Chicago/Turabian StyleChen, Yuh-Shyan, Chih-Shun Hsu, and Ren-Shao Chung. 2022. "A Semi-Supervised 3D Indoor Localization Using Multi-Kernel Learning for WiFi Networks" Sensors 22, no. 3: 776. https://doi.org/10.3390/s22030776
APA StyleChen, Y. -S., Hsu, C. -S., & Chung, R. -S. (2022). A Semi-Supervised 3D Indoor Localization Using Multi-Kernel Learning for WiFi Networks. Sensors, 22(3), 776. https://doi.org/10.3390/s22030776