
Lidar-Based Navigation of Subterranean Environments Using Bio-Inspired Wide-Field Integration of Nearness


Abstract
:1. Introduction
2. Materials and Methods
2.1. System and Sensing Models
2.2. Bio-Inspired Nearness Control
2.2.1. Parameterization of the Environment
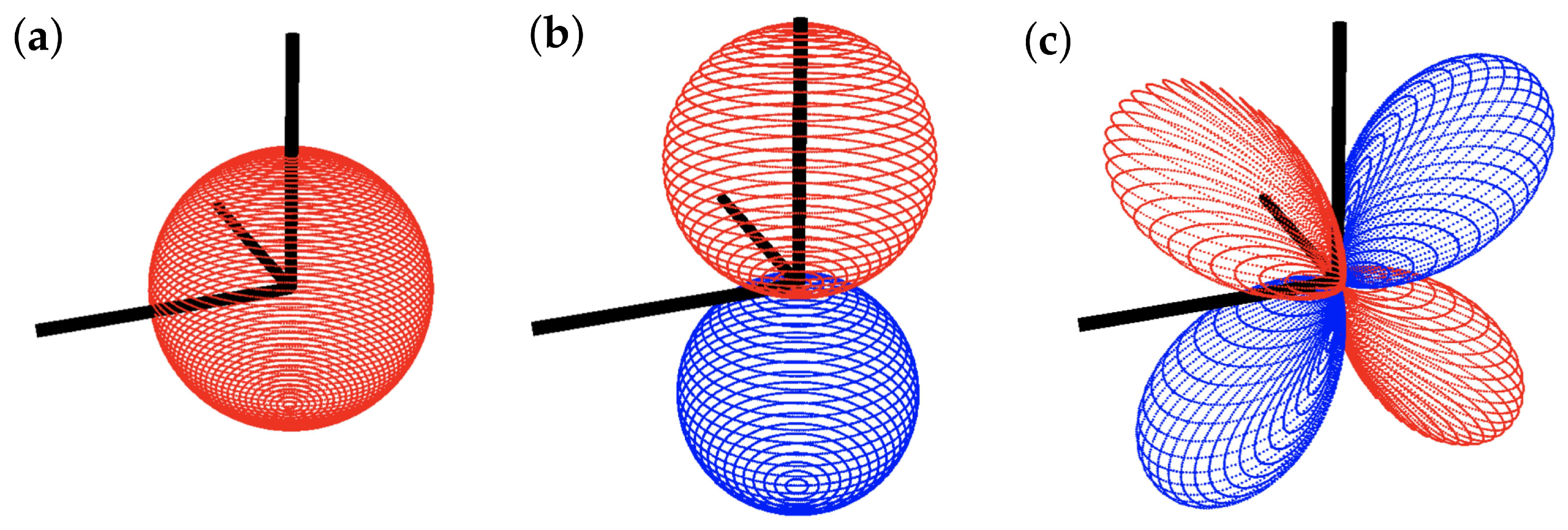
2.2.2. Wide-Field Integration
2.2.3. Feedback Control Design
3. Results
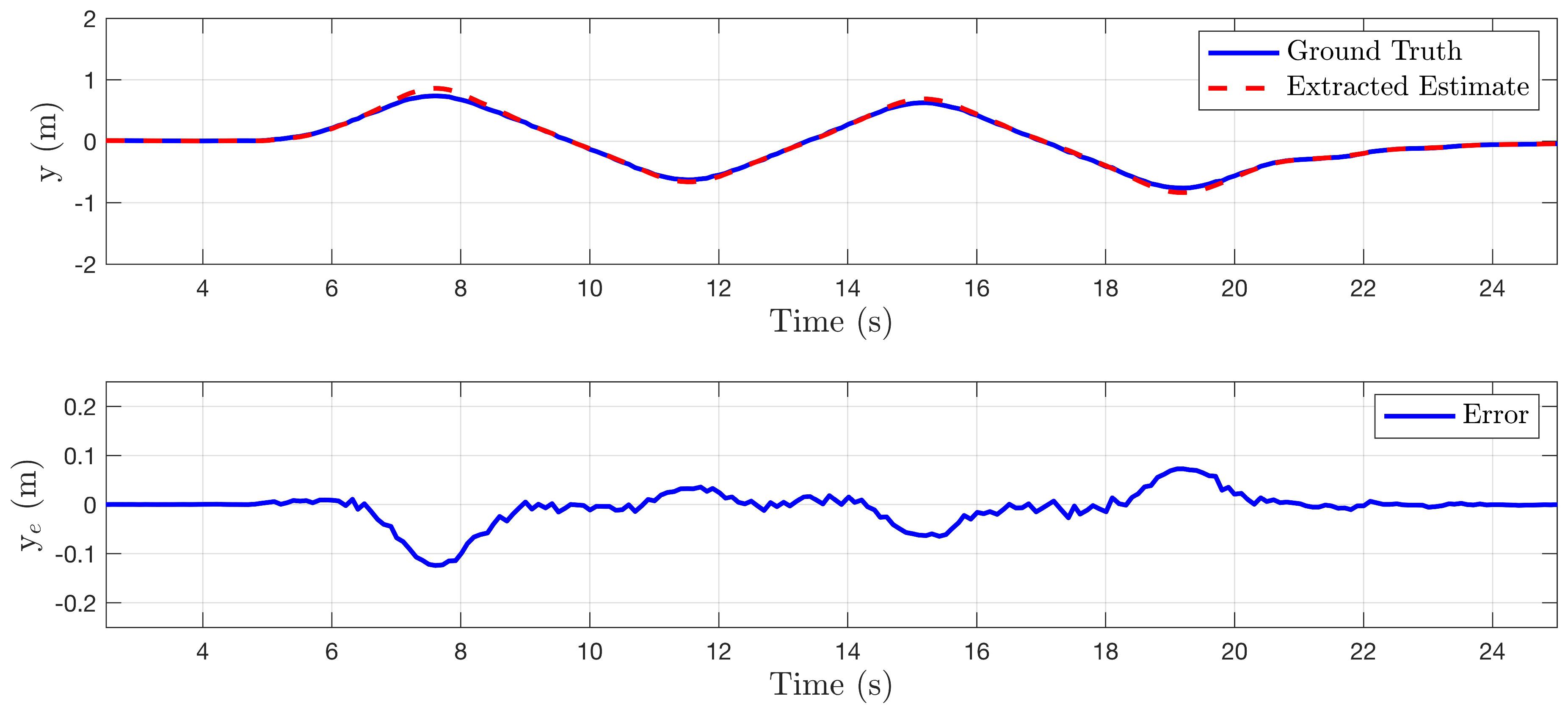
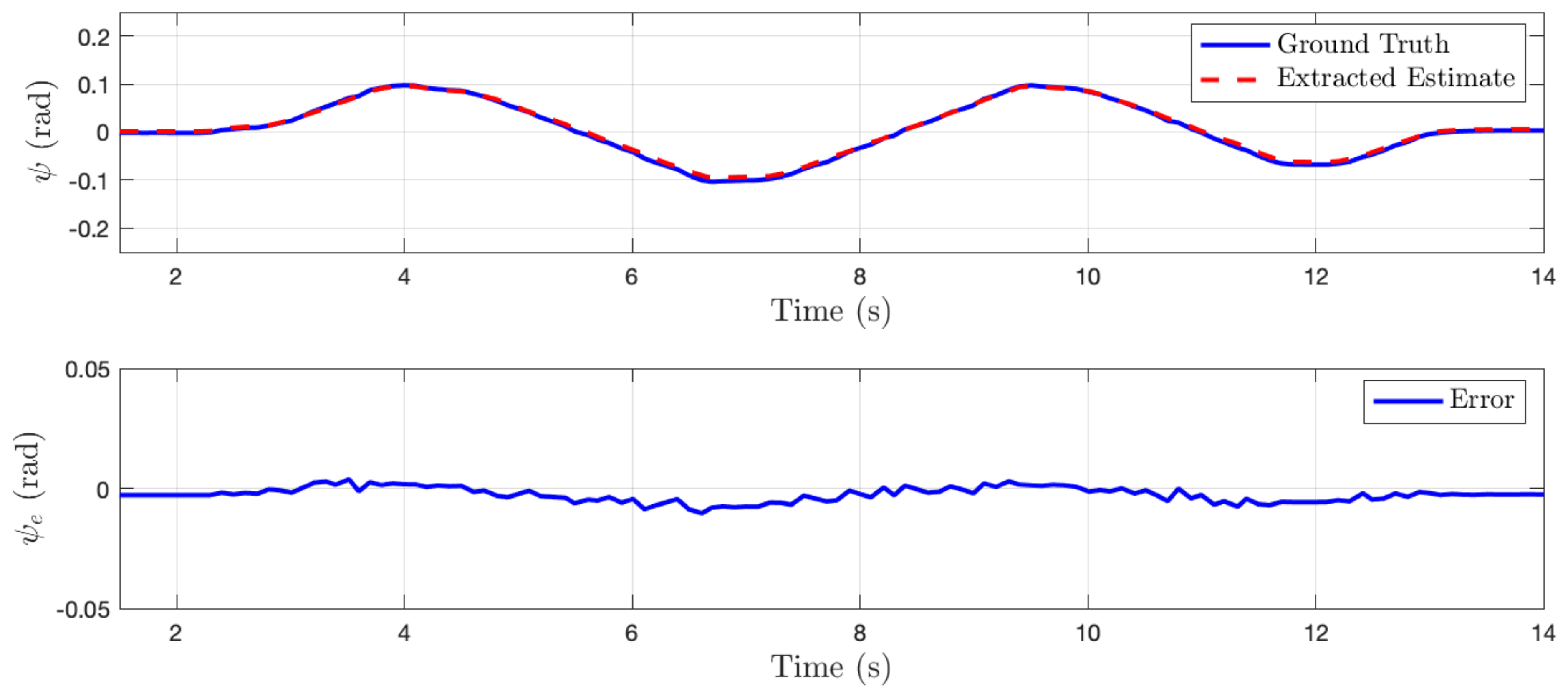
3.1. Performance in Generalized Cylinder Environment
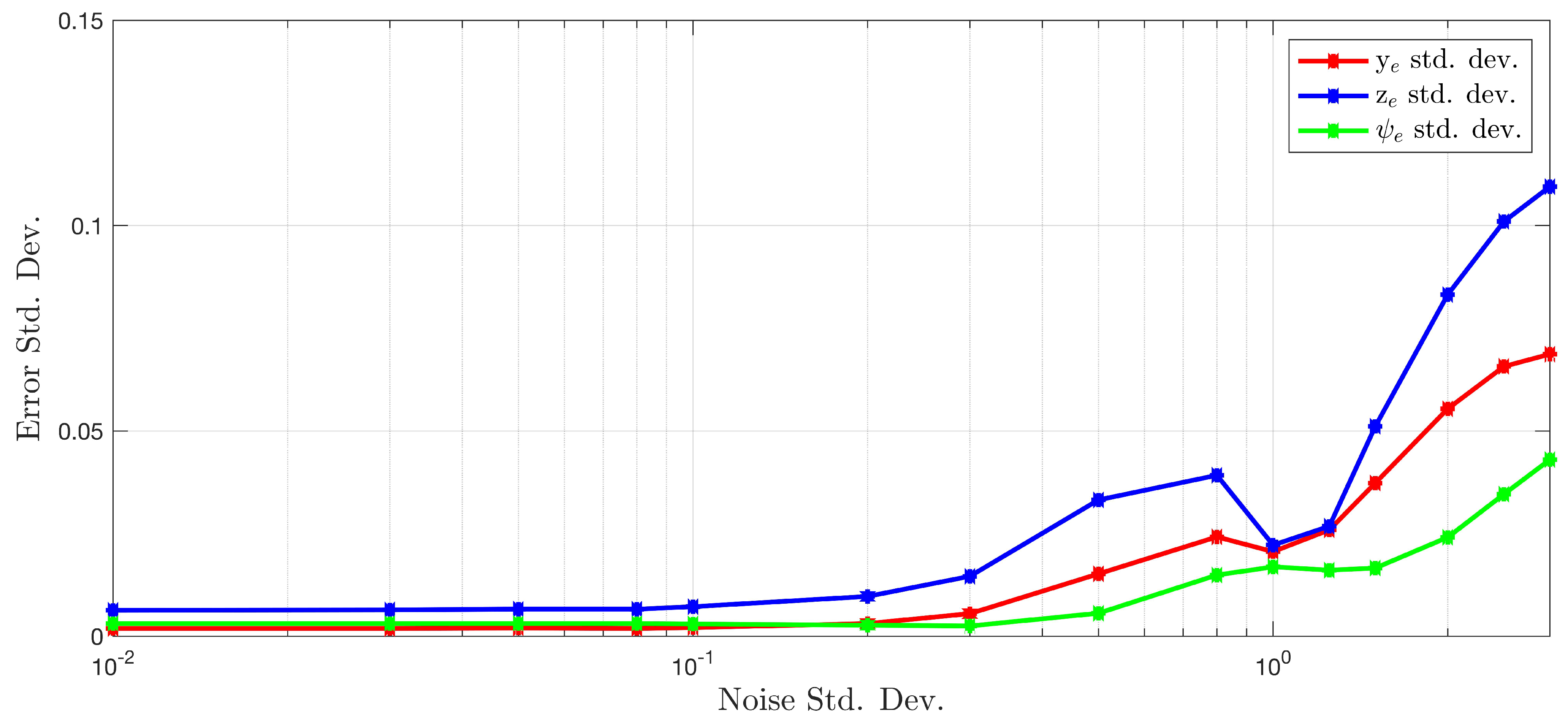
3.2. Robustness to Noise
3.3. Performance in Nongeneralized Subterranean Environments
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| WFI | Wide-Field Integration |
| DARPA | Defense Advanced Research Projects Agency |
| SubT | Subterranean (in reference to the DARPA Subterranean Challenge) |
| LiDAR | Light Detection and Ranging |
| sUAS | small Unmanned Aerial Systems |
| UGV | Unmanned Ground Vehicles |
| SWaP | Size, Weight, and Power |
| LPTC | Lobula Plate Tangential Cell |
| ROS | Robot Operating System |
| RRT | Rapidly-Exploring Random Trees |
Appendix A. Intersection of a Line and a Cylinder Surface
Appendix B. Quadrotor Model Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quadrotor Model Parameters | ||
|---|---|---|
| Parameter | Value | Units |
| 1/s | ||
| m/(s%) | ||
| 1/s | ||
| −14.95504248 | m/(s%) | |
| 1/s | ||
| rad/(s%) | ||
Appendix C. Controller Gains
| Controller Gains | |
|---|---|
| Gain | Value |
References
- Otsu, K.; Tepsuporn, S.; Thakker, R.; Vaquero, T.S.; Edlund, J.A.; Walsh, W.; Miles, G.; Heywood, T.; Wolf, M.T.; Agha-Mohammadi, A. Supervised Autonomy for Communication-degraded Subterranean Exploration by a Robot Team. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–9. [Google Scholar] [CrossRef]
- Ebadi, K.; Chang, Y.; Palieri, M.; Stephens, A.; Hatteland, A.; Heiden, E.; Thakur, A.; Funabiki, N.; Morrell, B.; Wood, S.; et al. LAMP: Large-Scale Autonomous Mapping and Positioning for Exploration of Perceptually-Degraded Subterranean Environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Paris, France, 31 May–31 August 2020; pp. 80–86. [Google Scholar] [CrossRef]
- Miller, I.D.; Cohen, A.; Kulkarni, A.; Laney, J.; Taylor, C.J.; Kumar, V.; Cladera, F.; Cowley, A.; Shivakumar, S.S.; Lee, E.S.; et al. Mine Tunnel Exploration Using Multiple Quadrupedal Robots. IEEE Robot. Autom. Lett. 2020, 5, 2840–2847. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Lu, C.; Chen, K.; Ser, P.; Huang, J.; Shen, Y.; Chen, P.; Chang, P.; Lee, S.; Wang, H. Duckiefloat: A Collision-Tolerant Resource-Constrained Blimp for Long-Term Autonomy in Subterranean Environments. arXiv 2019, arXiv:1910.14275. [Google Scholar]
- Rouček, T.; Pecka, M.; Čížek, P.; Petříček, T.; Bayer, J.; Šalanský, V.; Heřt, D.; Petrlík, M.; Báča, T.; Spurný, V.; et al. DARPA Subterranean Challenge: Multi-robotic Exploration of Underground Environments. In Modelling and Simulation for Autonomous Systems; Mazal, J., Fagiolini, A., Vasik, P., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 274–290. [Google Scholar]
- Khattak, S.; Nguyen, H.; Mascarich, F.; Dang, T.; Alexis, K. Complementary Multi–Modal Sensor Fusion for Resilient Robot Pose Estimation in Subterranean Environments. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1024–1029. [Google Scholar] [CrossRef]
- Santamaria-Navarro, A.; Thakker, R.; Fan, D.D.; Morrell, B.; Agha-mohammadi, A. Towards Resilient Autonomous Navigation of Drones. arXiv 2020, arXiv:2008.09679. [Google Scholar]
- Ohradzansky, M.T.; Mills, A.B.; Rush, E.R.; Riley, D.G.; Frew, E.W.; Humbert, J.S. Reactive Control and Metric-Topological Planning for Exploration. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4073–4079. [Google Scholar] [CrossRef]
- Dang, T.; Khattak, S.; Mascarich, F.; Alexis, K. Explore locally, plan globally: A path planning framework for autonomous robotic exploration in subterranean environments. In Proceedings of the 2019 19th International Conference on Advanced Robotics (ICAR), Belo Horizonte, Brazil, 2–6 December 2019; pp. 9–16. [Google Scholar]
- Dang, T.; Tranzatto, M.; Khattak, S.; Mascarich, F.; Alexis, K.; Hutter, M. Graph-based subterranean exploration path planning using aerial and legged robots. J. Field Robot. 2020, 37, 1363–1388. [Google Scholar] [CrossRef]
- Lajoie, P.Y.; Ramtoula, B.; Chang, Y.; Carlone, L.; Beltrame, G. DOOR-SLAM: Distributed, Online, and Outlier Resilient SLAM for Robotic Teams. IEEE Robot. Autom. Lett. 2020, 5, 1656–1663. [Google Scholar] [CrossRef] [Green Version]
- Papachristos, C.; Khattak, S.; Mascarich, F.; Dang, T.; Alexis, K. Autonomous Aerial Robotic Exploration of Subterranean Environments relying on Morphology–aware Path Planning. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 299–305. [Google Scholar] [CrossRef]
- Montgomery, J.C.; Coombs, S.; Baker, C.F. The Mechanosensory Lateral Line System of the Hypogean form of Astyanax Fasciatus. Environ. Biol. Fishes 2001, 62, 87–96. [Google Scholar] [CrossRef]
- Montgomery, J.; Coombs, S.; Halstead, M. Biology of the mechanosensory lateral line in fishes. Rev. Fish Biol. Fish. 2005, 5, 399–416. [Google Scholar] [CrossRef]
- Montgomery, J.C.; Baker, C.F.; Carton, A.G. The lateral line can mediate rheotaxis in fish. Nature 1997, 389, 960–963. [Google Scholar] [CrossRef]
- Suli, A.; Watson, G.M.; Rubel, E.W.; Raible, D.W. Rheotaxis in Larval Zebrafish Is Mediated by Lateral Line Mechanosensory Hair Cells. PLoS ONE 2012, 7, e29727. [Google Scholar] [CrossRef] [Green Version]
- Partridge, B.L.; Pitcher, T.J. The sensory basis of fish schools: Relative roles of lateral line and vision. J. Comp. Physiol. 1990, 135, 315–325. [Google Scholar] [CrossRef]
- Montgomery, J.; Hamilton, A. Sensory contributions to nocturnal prey capture in the dwarf scorpion fish (Scorpaena papillosus). Mar. Freshw. Behav. Physiol. 1997, 30, 209–223. [Google Scholar] [CrossRef]
- Hoekstra, D.; Janssen, J. Non-visual feeding behavior of the mottled sculpin, Cottus bairdi, in Lake Michigan. Environ. Biol. Fishes 1985, 12, 111–117. [Google Scholar] [CrossRef]
- Dimble, K.D.; Faddy, J.M.; Humbert, J.S. Electrolocation-based underwater obstacle avoidance using wide-field integration methods. Bioinspir. Biomim. 2014, 9, 016012. [Google Scholar] [CrossRef] [PubMed]
- Ranganathan, B.; Dimble, K.; Faddy, J.; Humbert, J.S. Underwater navigation behaviors using Wide-Field Integration methods. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4147–4152. [Google Scholar] [CrossRef]
- Barth, F.G. Spider mechanoreceptors. Curr. Opin. Neurobiol. 2004, 14, 415–422. [Google Scholar] [CrossRef]
- Bleckmann, H. Prey Identification and Prey Localization in Surface-feeding Fish and Fishing Spiders. In Sensory Biology of Aquatic Animals; Atema, J., Fay, R.R., Popper, A.N., Tavolga, W.N., Eds.; Springer: New York, NY, USA, 1988; pp. 619–641. [Google Scholar]
- Mhatre, N.; Sivalinghem, S.; Mason, A.C. Posture controls mechanical tuning in the black widow spider mechanosensory system. bioRxiv 2018. [Google Scholar] [CrossRef]
- Barth, F. How To Catch the Wind: Spider Hairs Specialized for Sensing the Movement of Air. Naturwissenschaften 2000, 87, 52–58. [Google Scholar] [CrossRef]
- Guarino, R.; Greco, G.; Mazzolai, B.; Pugno, N. Fluid-structure interaction study of spider’s hair flow-sensing system. Mater. Today Proc. 2019, 7, 418–425. [Google Scholar] [CrossRef]
- Kant, R.; Humphrey, J.A.C. Response of cricket and spider motion-sensing hairs to airflow pulsations. J. R. Soc. Interface 2009, 6, 1047–1064. [Google Scholar] [CrossRef] [Green Version]
- Frye, M.A.; Dickinson, M.H. Fly flight: A model for the neural control of complex behavior. Neuron 2001, 32, 385–388. [Google Scholar] [CrossRef] [Green Version]
- Egelhaaf, M.; Kern, R.; Krapp, H.G.; Kretzberg, J.; Kurtz, R.; Warzecha, A.K. Neural encoding of behaviourally relevant visual-motion information in the fly. Trends Neurosci. 2002, 25, 96–102. [Google Scholar] [CrossRef] [Green Version]
- Borst, A.; Juergen, H. Neural networks in the cockpit of the fly. J. Comp. Physiol. Neuroethol. Sens. Neural Behav. Physiol. 2002, 188, 419–437. [Google Scholar] [CrossRef]
- Srinivasan, M.V.; Zhang, S. Visual Motor Computations in Insects. Annu. Rev. Neurosci. 2004, 27, 679–696. [Google Scholar] [CrossRef] [Green Version]
- Humbert, J.S.; Conroy, J.K.; Neely, C.W.; Barrows, G. Wide-Field Integration Methods for Visuomotor Control. In FLying Insects Robot; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Humbert, J.S.; Hyslop, A.M. Bioinspired Visuomotor Convergence. IEEE Trans. Robot. 2010, 26, 121–130. [Google Scholar] [CrossRef]
- Keshavan, J.; Gremillion, G.; Escobar-Alvarez, H.; Humbert, J.S. A mu analysis-based, controller-synthesis framework for robust bioinspired visual navigation in less-structured environments. Bioinspir. Biomim. 2014, 9, 025011. [Google Scholar] [CrossRef] [PubMed]
- Srinivasan, M.; Chahl, J.S.; Weber, K.; Venkatesh, S.; Nagle, M.G.; Zhang, S. Robot navigation inspired by principles of insect vision. Robot. Auton. Syst. 1998, 26, 203–216. [Google Scholar] [CrossRef]
- Serres, J.H.; Ruffier, F. Optic Flow-Based Robotics; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016; pp. 1–14. [Google Scholar] [CrossRef]
- Serres, J.H.; Ruffier, F. Optic flow based collision-free strategies: From insects to robots. Arthropod Struct. Dev. 2017, 46, 703–717. [Google Scholar] [CrossRef] [PubMed]
- Raharijaona, T.; Serres, J.; Vanhoutte, E.; Ruffier, F. Toward an insect-inspired event-based autopilot combining both visual and control events. In Proceedings of the 2017 3rd International Conference on Event-Based Control, Communication and Signal Processing (EBCCSP), Funchal, Portugal, 24–26 May 2017; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Vanhoutte, E.; Ruffier, F.; Serres, J. A quasi-panoramic bio-inspired eye for flying parallel to walls. In Proceedings of the 2017 IEEE SENSORS, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Lecoeur, J.; Baird, E.; Floreano, D. Spatial Encoding of Translational Optic Flow in Planar Scenes by Elementary Motion Detector Arrays. Sci. Rep. 2018, 8, 5821. [Google Scholar] [CrossRef] [Green Version]
- Serres, J.R.; Morice, A.H.; Blary, C.; Montagne, G.; Ruffier, F. An innovative optical context to make honeybees crash repeatedly. bioRxiv 2021. [Google Scholar] [CrossRef]
- Serres, J.; Evans, T.; Akesson, S.; Duriez, O.; Shamoun-Baranes, J.; Ruffier, F.; Hedenström, A. Optic flow cues help explain altitude control over sea in freely flying gulls. J. R. Soc. Interface 2019, 16, 20190486. [Google Scholar] [CrossRef] [Green Version]
- Ohradzansky, M.; Alvarez, H.E.; Keshavan, J.; Ranganathan, B.; Humbert, J. Autonomous Bio-Inspired Small-Object Detection and Avoidance. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1–9. [Google Scholar]
- Alvarez, H.E.; Ohradzansky, M.T.; Keshavan, J.; Ranganathan, B.; Humbert, J.S. Bio-Inspired Approaches for Small-Object Detection and Avoidance. IEEE Trans. Robot. 2019, 35, 1220–1232. [Google Scholar] [CrossRef]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Montano, L.; Asensio, J.R. Real-Time Robot Navigation in Unstructured Environments Using a 3D Laser Rangefinder. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems, Innovative Robotics for Real-World Applications, IROS ’97, Grenoble, France, 11 September 1997. [Google Scholar]
- Rimon, E.; Koditschek, D. Exact Robot Navigation Using Artificial Potential Functions. IEEE Trans. Robot. Autom. 1992, 8, 501–518. [Google Scholar] [CrossRef] [Green Version]
- Fan, X.; Guo, Y.; Liu, H.; Wei, B.; Lyu, W. Improved Artificial Potential Field Method Applied for AUV Path Planning. Math. Probl. Eng. 2020, 2020, 6523158. [Google Scholar] [CrossRef]
- Minguez, J.; Montano, L. Nearness Diagram Navigation (ND): A New Real Time Collision Avoidance Approach. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Takamatsu, Japan, 31 October–5 November 2000. [Google Scholar]
- Durham, J.W.; Bullo, F. Smooth Nearness-Diagram Navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008. [Google Scholar]
- Mujahad, M.; Fischer, D.; Mertsching, B.; Jaddu, H. Closest Gap Based (CG) Reactive Obstacle Avoidance Navigation for Highly Cluttered Environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Mujahad, M.; Fischer, D.; Mertsching, B. Tangential Gap Flow (TGF) navigation: A new reactive obstacle avoidance approach for highly cluttered environments. Robot. Auton. Syst. 2016, 84, 15–30. [Google Scholar] [CrossRef]
- Steiner, J.; He, X.; Bourne, J.; Leang, K.K. Open-sector rapid-reactive collision avoidance: Application in aerial robot navigation through outdoor unstructured environments. Robot. Auton. Syst. 2019, 112, 211–220. [Google Scholar] [CrossRef]
- Lu, L.; Sampedro, C.; Rodriguez-Vazquez, J.; Campoy, P. Laser-based Collision Avoidance and Reactive Navigation using RRT* and Signed Distance Field for Multirotor UAVs. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Saetti, U.; Berger, T.; Horn, J.; Lagoa, C.; Lakhmani, S. Design of Dynamic Inversion and Explicit Model Following Control Laws for Quadrotor Inner and Outer Loops. J. Am. Helicopter Soc. 2020, 65, 1–6. [Google Scholar]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ohradzansky, M.T.; Humbert, J.S. Lidar-Based Navigation of Subterranean Environments Using Bio-Inspired Wide-Field Integration of Nearness. Sensors 2022, 22, 849. https://doi.org/10.3390/s22030849
Ohradzansky MT, Humbert JS. Lidar-Based Navigation of Subterranean Environments Using Bio-Inspired Wide-Field Integration of Nearness. Sensors. 2022; 22(3):849. https://doi.org/10.3390/s22030849
Chicago/Turabian StyleOhradzansky, Michael T., and J. Sean Humbert. 2022. "Lidar-Based Navigation of Subterranean Environments Using Bio-Inspired Wide-Field Integration of Nearness" Sensors 22, no. 3: 849. https://doi.org/10.3390/s22030849
APA StyleOhradzansky, M. T., & Humbert, J. S. (2022). Lidar-Based Navigation of Subterranean Environments Using Bio-Inspired Wide-Field Integration of Nearness. Sensors, 22(3), 849. https://doi.org/10.3390/s22030849