
Unified Accurate Attitude Control for Dual-Tiltrotor UAV with Cyclic Pitch Using Actuator Dynamics Compensated LADRC

Abstract
:1. Introduction
2. Modeling
2.1. Configuration Descriptions
2.2. Dynamics Model
- (1)
- Owing to the relatively small size of the rotor, its blade is rigid in bending and torsion and its flapping angle is small (<10 deg).
- (2)
- The rotor-induced velocity is uniformly distributed.
- (3)
- The lead-lag motion, which produces significantly smaller forces on the rotor hub than the flapping, is ignored.
- (4)
- The quasi-static solution to the flapping equation is a periodic function that can be expressed as the Fourier series with the second and higher harmonics ignored.
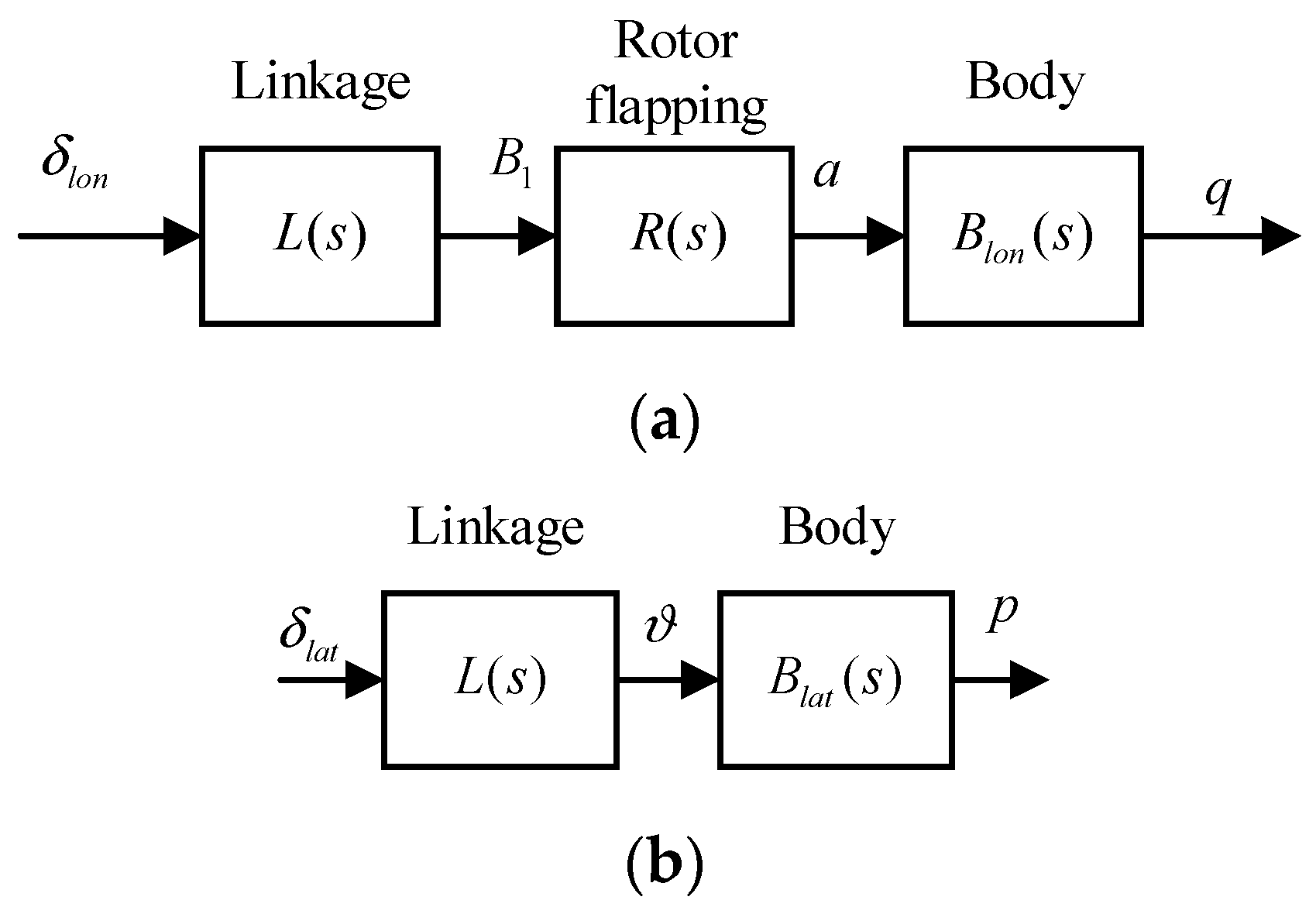
2.3. Identification of Rotor-Body Coupling Dynamics
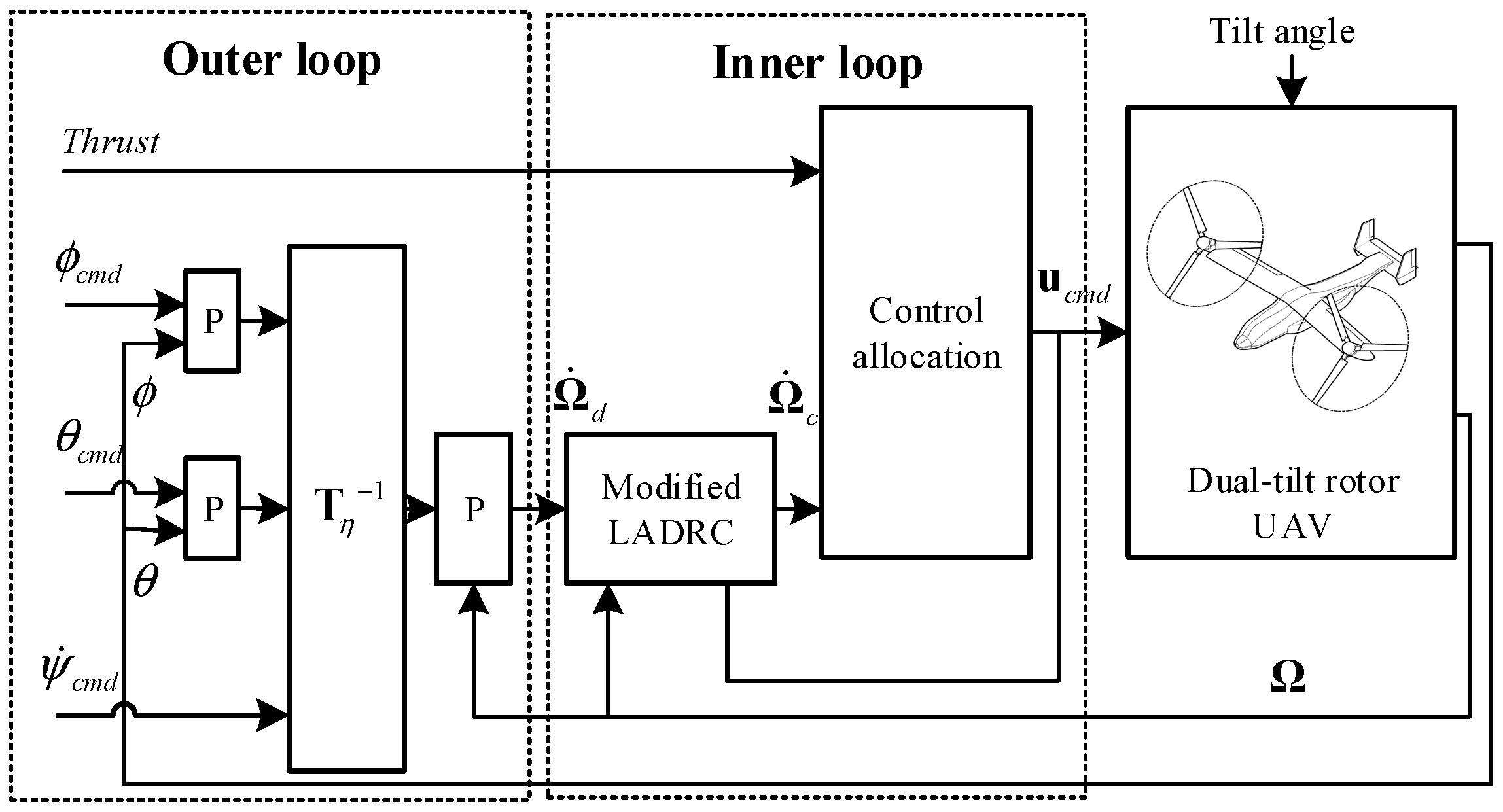
3. Unified Accurate Attitude Control Using Modified LADRC
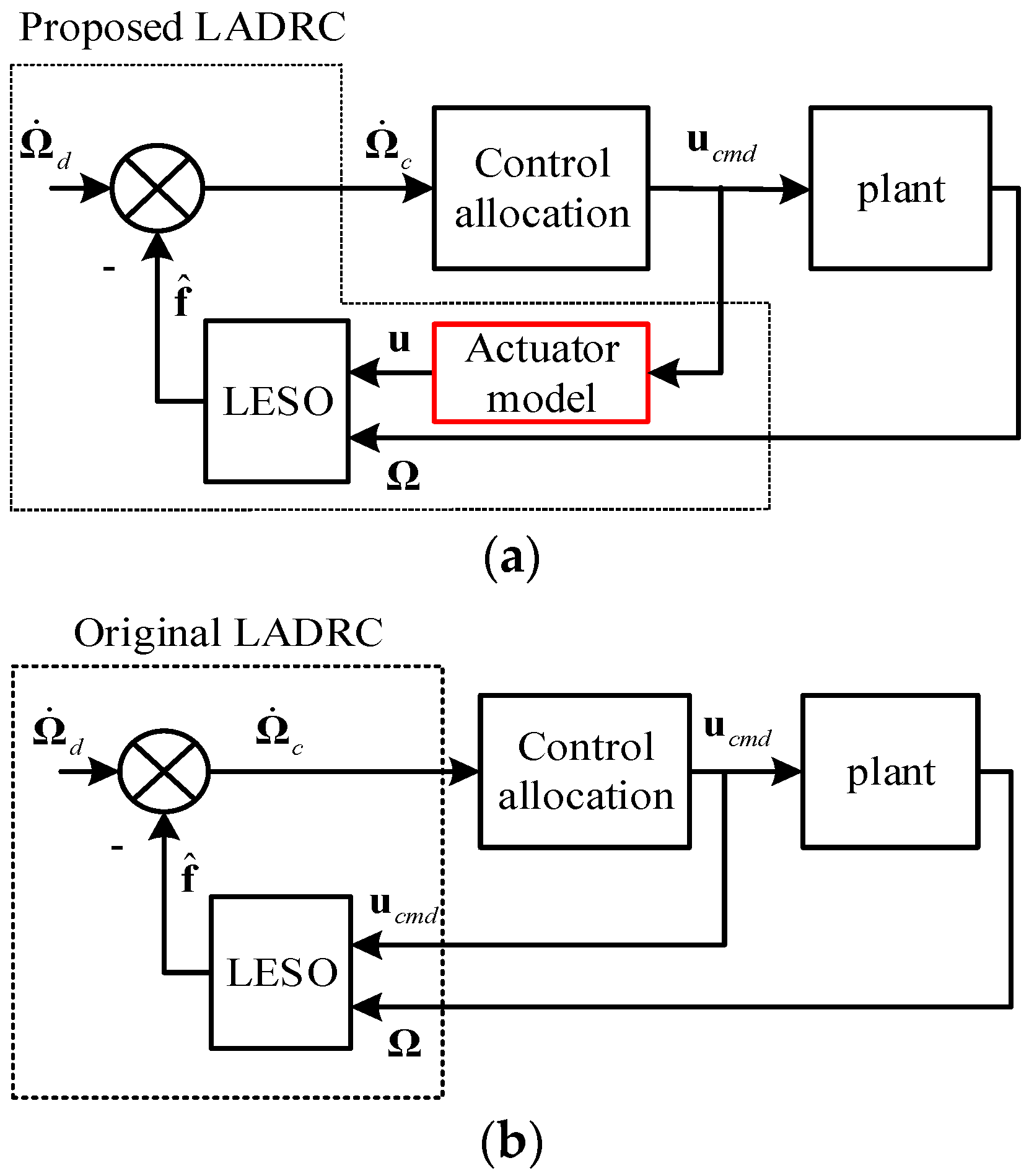
3.1. Actuator Dynamics Compensated LADRC
3.2. Daisy-Chain-Based Control Allocation
4. Simulation Results
4.1. Effectiveness of the Modified LADRC Controller
4.2. Robustness against Model Uncertainties and Disturbances
5. Flight Test Results
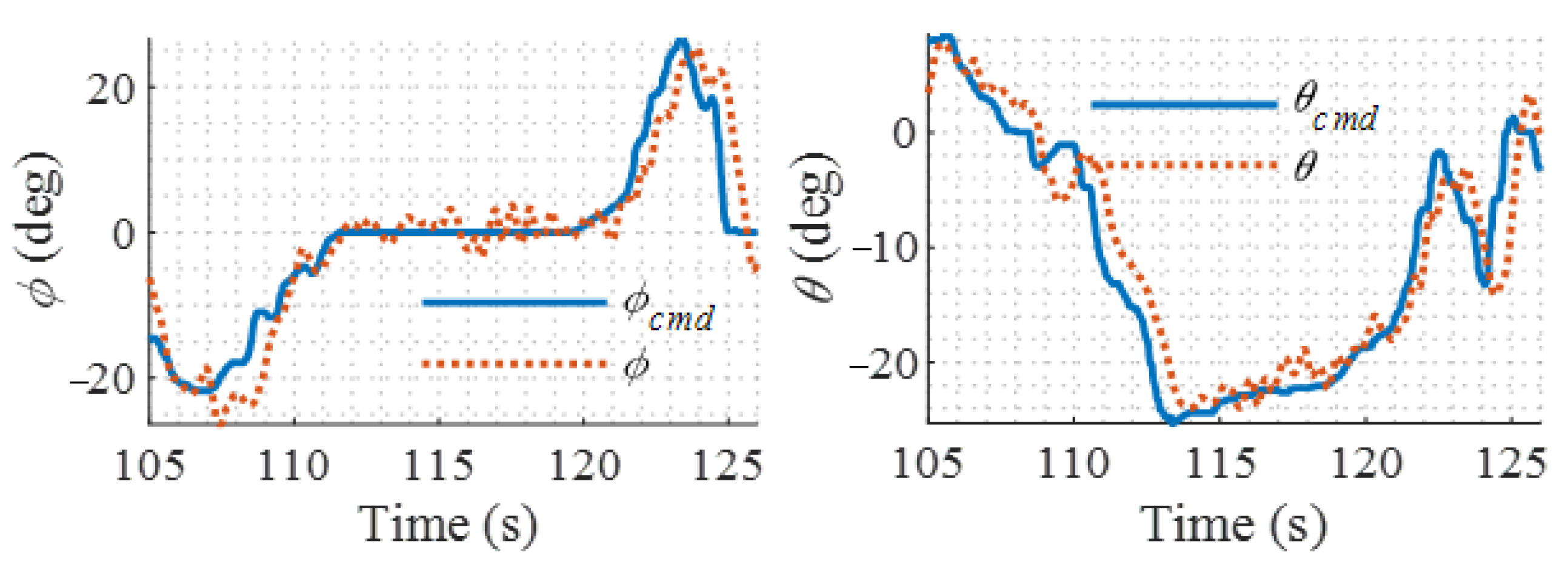
5.1. Comparison of Modified LADRC with PID Controller
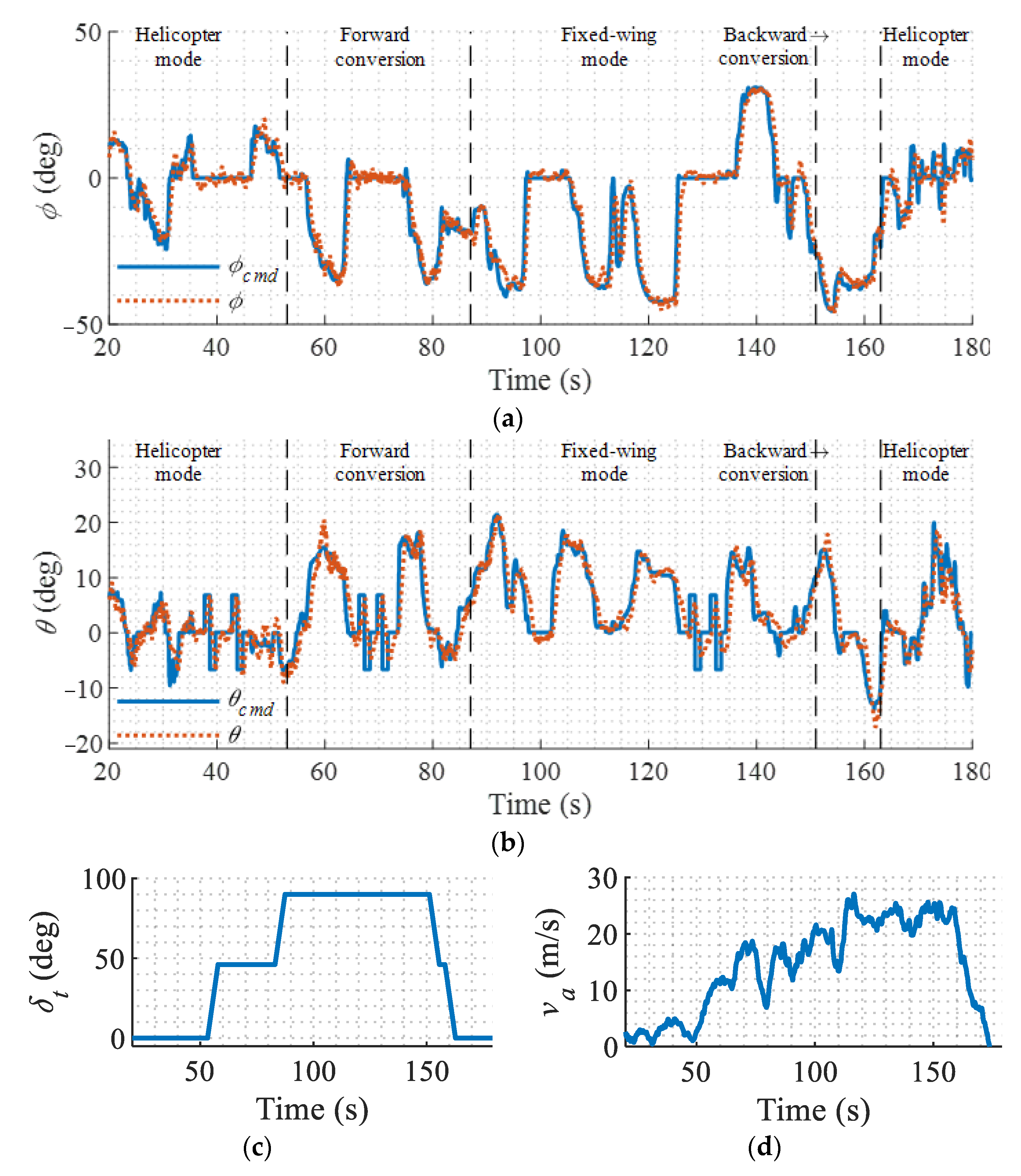
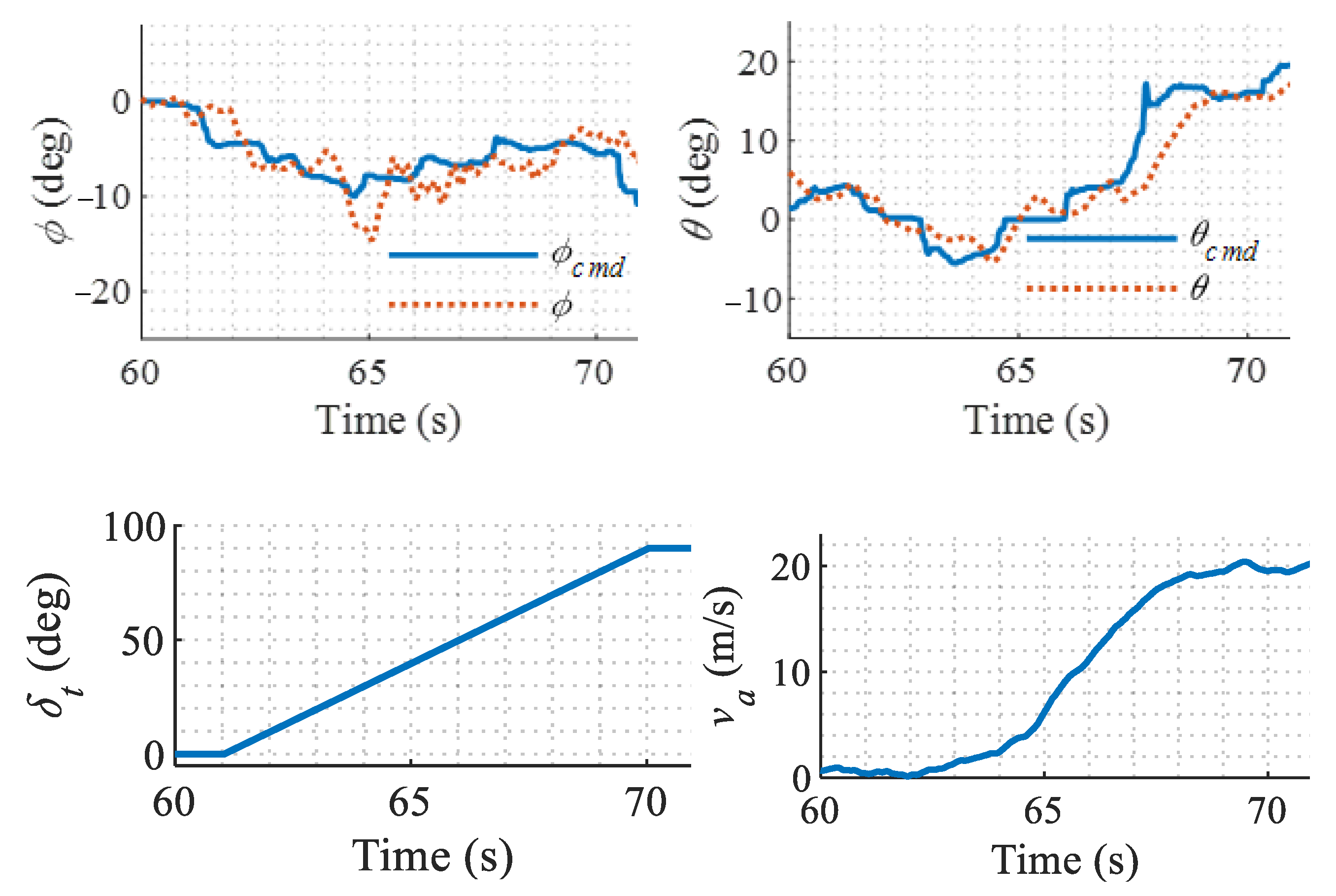
5.2. Performance of Modified LADRC in Different Flight Modes
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, B.; Sun, J.; Zhou, W.; Wen, C.Y.; Low, K.H.; Chen, C.-K. Transition Optimization for a VTOL Tail-Sitter UAV. IEEE/ASME Trans. Mechatron. 2020, 25, 2534–2545. [Google Scholar] [CrossRef]
- Panigrahi, S.; Krishna, Y.S.S.; Thondiyath, A. Design, Analysis, and Testing of a Hybrid VTOL Tilt-Rotor UAV for Increased Endurance. Sensors 2021, 21, 5987. [Google Scholar] [CrossRef] [PubMed]
- Kabiri, M.; Atrianfar, H.; Menhaj, M.B. Trajectory tracking of a class of under-actuated thrust-propelled vehicle with uncertainties and unknown disturbances. Nonlinear Dyn. 2017, 90, 1695–1706. [Google Scholar] [CrossRef]
- Saeed, A.S.; Younes, A.B.; Cai, C.; Cai, G. A survey of hybrid Unmanned Aerial Vehicles. Prog. Aerosp. Sci. 2018, 98, 91–105. [Google Scholar] [CrossRef]
- Ke, Y.; Wang, K.; Chen, B.M. Design and Implementation of a Hybrid UAV with Model-Based Flight Capabilities. IEEE/ASME Trans. Mechatron. 2018, 23, 1114–1125. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, H.; Liu, Y. An evaluative review of the VTOL technologies for unmanned and manned aerial vehicles. Comput. Commun. 2019, 149, 356–369. [Google Scholar] [CrossRef]
- Liu, Z.; He, Y.; Yang, L.; Han, J. Control techniques of tilt rotor unmanned aerial vehicle systems: A review. Chin. J. Aeronaut. 2017, 30, 135–148. [Google Scholar] [CrossRef]
- Ye, L.; Zhang, Y.; Yang, S.; Zhu, X.; Dong, J. Numerical simulation of aerodynamic interaction for a tilt rotor aircraft in helicopter mode. Chin. J. Aeronaut. 2016, 29, 843–854. [Google Scholar] [CrossRef] [Green Version]
- Johnson, W.; Yamauchi, G.; Derby, M.; Wadcock, A. Wind Tunnel Measurements and Calculations of Aerodynamic Interactions Between Tiltrotor Aircraft. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2002. [Google Scholar]
- Avanzini, G.; Torasso, A.; de Matteis, G. Assessment of Helicopter Model Fidelity through Inverse Simulation. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Montreal, QC, Canada, 6–9 August 2011. [Google Scholar]
- Haycock, B.; Grant, P. A Real-time Helicopter Model with Flexible Main Rotor Blades. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Montreal, QC, Canada, 6–9 August 2011. [Google Scholar]
- Cetinsoy, E.; Dikyar, S.; Hancer, C.; Oner, K.; Sirimoglu, E.; Unel, M.; Aksit, M. Design and construction of a novel quad tilt-wing UAV. Mechatronics 2012, 22, 723–745. [Google Scholar] [CrossRef]
- Park, S.; Bae, J.; Kim, Y.; Kim, S. Fault tolerant flight control system for the tilt-rotor UAV. J. Frankl. Inst. 2013, 350, 2535–2559. [Google Scholar] [CrossRef]
- Stone, R.H.; Anderson, P.; Hutchison, C.; Tsai, A.; Gibbens, P.; Wong, K.C. Flight Testing of the T-Wing Tail-Sitter Unmanned Air Vehicle. J. Aircr. 2008, 45, 673–685. [Google Scholar] [CrossRef]
- Horn, J. Non-Linear Dynamic Inversion Control Design for Rotorcraft. Aerospace 2019, 6, 38. [Google Scholar] [CrossRef] [Green Version]
- Papachristos, C.; Alexis, K.; Nikolakopoulos, G.; Tzes, A. Model predictive attitude control of an unmanned Tilt-Rotor aircraft. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 922–927. [Google Scholar]
- Valasek, J.; Ito, D.; Ward, D. Robust dynamic inversion controller design and analysis for the X-38. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2001. [Google Scholar]
- Rysdyk, R.T.; Calise, A.J. Adaptive Model Inversion Flight Control for Tilt-Rotor Aircraft. J. Guid. Control. Dyn. 1999, 22, 402–440. [Google Scholar] [CrossRef] [Green Version]
- di Francesco, G.; D’Amato, E.; Mattei, M. INDI Control with Direct Lift for a Tilt Rotor UAV. IFAC-PapersOnLine 2015, 48, 156–161. [Google Scholar] [CrossRef]
- Wang, Z.; Gong, Z.; Chen, Y.; Sun, M.; Xu, J. Practical control implementation of tri-tiltRotor flying wing unmanned aerial vehicles based upon active disturbance rejection control. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 943–960. [Google Scholar] [CrossRef]
- Simplicio, P.; Pavel, M.; van Kampen, E.-J.; Chu, Q. An acceleration measurements-based approach for helicopter nonlinear flight control using Incremental Nonlinear Dynamic Inversion. Control Eng. Pr. 2013, 21, 1065–1077. [Google Scholar] [CrossRef]
- Jin, H.; Song, J.; Lan, W.; Gao, Z. On the characteristics of ADRC: A PID interpretation. Sci. China Inf. Sci. 2020, 63, 1–3. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, New York, NY, USA, 9–13 July 2003; Volume 1–6, pp. 4989–4996. [Google Scholar]
- Shi, D.; Wu, Z.; Chou, W. Generalized Extended State Observer Based High Precision Attitude Control of Quadrotor Vehicles Subject to Wind Disturbance. IEEE Access 2018, 6, 32349–32359. [Google Scholar] [CrossRef]
- Yang, H.; Cheng, L.; Xia, Y.; Yuan, Y. Active Disturbance Rejection Attitude Control for a Dual Closed-Loop Quadrotor Under Gust Wind. IEEE Trans. Control Syst. Technol. 2017, 26, 1400–1405. [Google Scholar] [CrossRef]
- Aydemir, M.; Arıkan, K.B. Evaluation of the Disturbance Rejection Performance of an Aerial Manipulator. J. Intell. Robot. Syst. 2019, 97, 451–469. [Google Scholar] [CrossRef]
- Cai, Z.; Wang, Z.; Zhao, J.; Wang, Y. Equivalence of LADRC and INDI controllers for improvement of LADRC in practical applications. ISA Trans. 2021, in press. [Google Scholar] [CrossRef] [PubMed]
- Stevens, B.L.; Lewis, F.L. Aircraft Control and Simulation, 2nd ed.; Wiley-Interscience: Hoboken, NJ, USA, 2003. [Google Scholar]
- Dreier, M.E. Aerodynamic and Dynamic Modeling of Rotors. In Introduction to Helicopter and Tiltrotor Flight Simulation; AIAA: Reston, VA, USA, 2007; pp. 169–244. [Google Scholar]
- Bernard, M. Identification of the Model. In Identification Modeling and Characteristics of Miniature Rotorcraft; Springer: Boston, MA, USA, 2003. [Google Scholar]
- Remple, R.K.; Tischler, M.B. Aircraft and Rotorcraft System Identification; Amer Inst of Aeronautics: Reston, VA, USA, 2006. [Google Scholar]
- Zhong, S.; Huang, Y.; Guo, L. A parameter formula connecting PID and ADRC. Sci. China Inf. Sci. 2020, 63, 1–13. [Google Scholar] [CrossRef]
- Fu, C.; Tan, W. Linear Active Disturbance Rejection Control for Processes with Time Delays: IMC Interpretation. IEEE Access 2020, 8, 16606–16617. [Google Scholar] [CrossRef]
- Li, P.; Zhu, G.; Zhang, M. Linear Active Disturbance Rejection Control for Servo Motor Systems with Input Delay via Internal Model Control Rules. IEEE Trans. Ind. Electron. 2020, 68, 1077–1086. [Google Scholar] [CrossRef]
- Xia, Y.; Liu, G.; Shi, P.; Han, J.; Rees, D. Active disturbance rejection control for uncertain multivariable systems with time-delay. IET Control Theory Appl. 2007, 1, 75–81. [Google Scholar] [CrossRef]
- Zhao, S.; Gao, Z. Modified active disturbance rejection control for time-delay systems. ISA Trans. 2014, 53, 882–888. [Google Scholar] [CrossRef] [Green Version]
- Durham, W.; Bordignon, K.A.; Beck, R. Solutions. In Aircraft Control Allocation; Wiley: Hoboken, NJ, USA, 2016; pp. 65–138. [Google Scholar]
- Binz, F.; Islam, T.; Moormann, D. Attitude control of tiltwing aircraft using a wing-fixed coordinate system and incremental nonlinear dynamic inversion. Int. J. Micro Air Veh. 2019, 11, 1756829319861370. [Google Scholar] [CrossRef]
- Zhi-Chao, H.; Yi-ning, L.; Yao-xin, L.; Dan, L. A new trifilar pendulum approach to identify all inertia parameters of a rigid body or assembly. Mech. Mach. Theory 2009, 44, 1270–1280. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Symbol | Units | |
|---|---|---|---|
| Rotor controls | Left collective pitch | Rad | |
| Right collective pitch | Rad | ||
| Left longitudinal cyclic pitch | Rad | ||
| Right longitudinal cyclic pitch | Rad | ||
| Aerodynamic surfaces | Aileron | Rad | |
| Elevator | Rad | ||
| Rudder | Rad |
| Symbol | Value | Units | Insensitivity |
|---|---|---|---|
| −2.79 | - | 5.08% | |
| −2.62 | - | 4.85% | |
| 122.00 | - | 1.38% | |
| 52.18 | - | 1.30% | |
| 0.020 | s | 1.37% | |
| 0.052 | s | 2.00% |
| Name | Symbol | Definition | Units | |
|---|---|---|---|---|
| Virtual rotor effectors | Symmetric collective pitch | ) | Rad | |
| Asymmetric collective pitch | ) | Rad | ||
| Symmetric cyclic pitch | ) | Rad | ||
| Asymmetric cyclic pitch | ) | Rad | ||
| Aerodynamic effectors | Aileron | - | Rad | |
| Elevator | - | Rad | ||
| Rudder | - | Rad |
| Control Channel | Helicopter Mode | Conversion Mode | Fixed-Wing Mode |
|---|---|---|---|
| Rotor thrust | |||
| Roll | |||
| Pitch | |||
| Yaw |
| Parameter | Unit | Value |
|---|---|---|
| Mass | kg | 3.2 |
| Length | m | 0.974 |
| Wingspan | m | 1.057 |
| Rotor radius | m | 0.32 |
| Inertia tensor (In helicopter mode) | kg·m2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Wang, Y.; Cai, Z.; Zhao, J.; Liu, N.; Zhao, Y. Unified Accurate Attitude Control for Dual-Tiltrotor UAV with Cyclic Pitch Using Actuator Dynamics Compensated LADRC. Sensors 2022, 22, 1559. https://doi.org/10.3390/s22041559
Wang Z, Wang Y, Cai Z, Zhao J, Liu N, Zhao Y. Unified Accurate Attitude Control for Dual-Tiltrotor UAV with Cyclic Pitch Using Actuator Dynamics Compensated LADRC. Sensors. 2022; 22(4):1559. https://doi.org/10.3390/s22041559
Chicago/Turabian StyleWang, Zexin, Yingxun Wang, Zhihao Cai, Jiang Zhao, Ningjun Liu, and Yanqi Zhao. 2022. "Unified Accurate Attitude Control for Dual-Tiltrotor UAV with Cyclic Pitch Using Actuator Dynamics Compensated LADRC" Sensors 22, no. 4: 1559. https://doi.org/10.3390/s22041559
APA StyleWang, Z., Wang, Y., Cai, Z., Zhao, J., Liu, N., & Zhao, Y. (2022). Unified Accurate Attitude Control for Dual-Tiltrotor UAV with Cyclic Pitch Using Actuator Dynamics Compensated LADRC. Sensors, 22(4), 1559. https://doi.org/10.3390/s22041559