
Design of an Estimator Using the Artificial Neural Network Technique to Characterise the Braking of a Motor Vehicle


Abstract
:1. Introduction
- The proposal of a novel methodology for the analysis of the data acquired by the sensors during the experiments. New indicators were defined in order to characterise the braking manoeuvre of a vehicle, providing information on type of braking, intensity or evolution over time.
- The development of an ANN-based estimation algorithm to estimate the pressure in the brake circuit and the type of braking. The system was implemented with the experimental data obtained from the sensors during the experiments. Therefore, the system will brake by imitating human behaviour.
- The proposed braking system automatically decides how to apply the brake when faced with the risk of a collision. It achieves this by using the information obtained by the sensors about the obstacle. Depending on the position of the obstacle and the speed of the vehicle, the actions on the braking system to reduce the speed will be to perform (1) maintained, (2) progressive and (3) emergency braking. In other words, the automatic braking offers safe and comfortable brake control, without braking too early or too late.
2. Materials and Methods
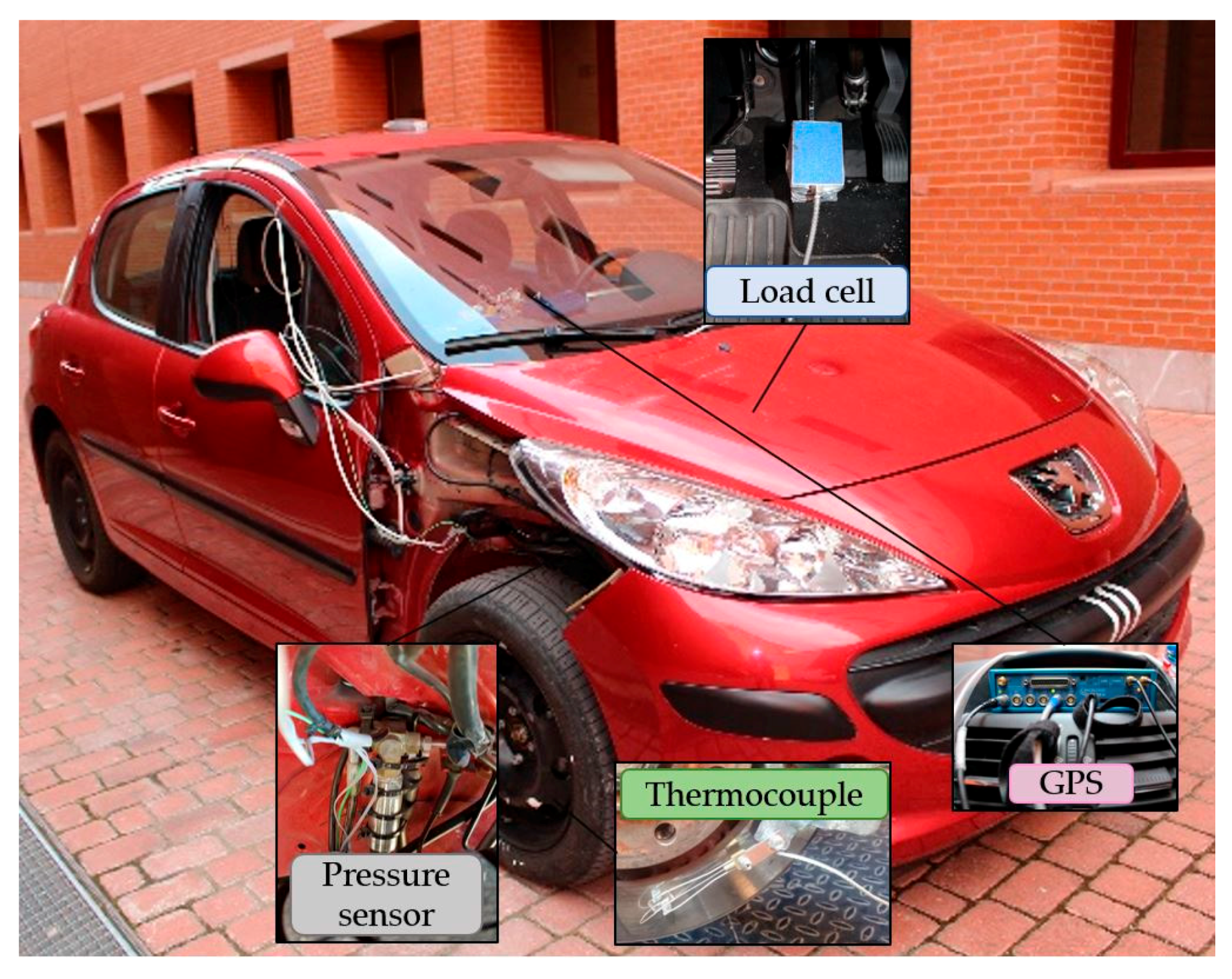
2.1. Instrumented Vehicle
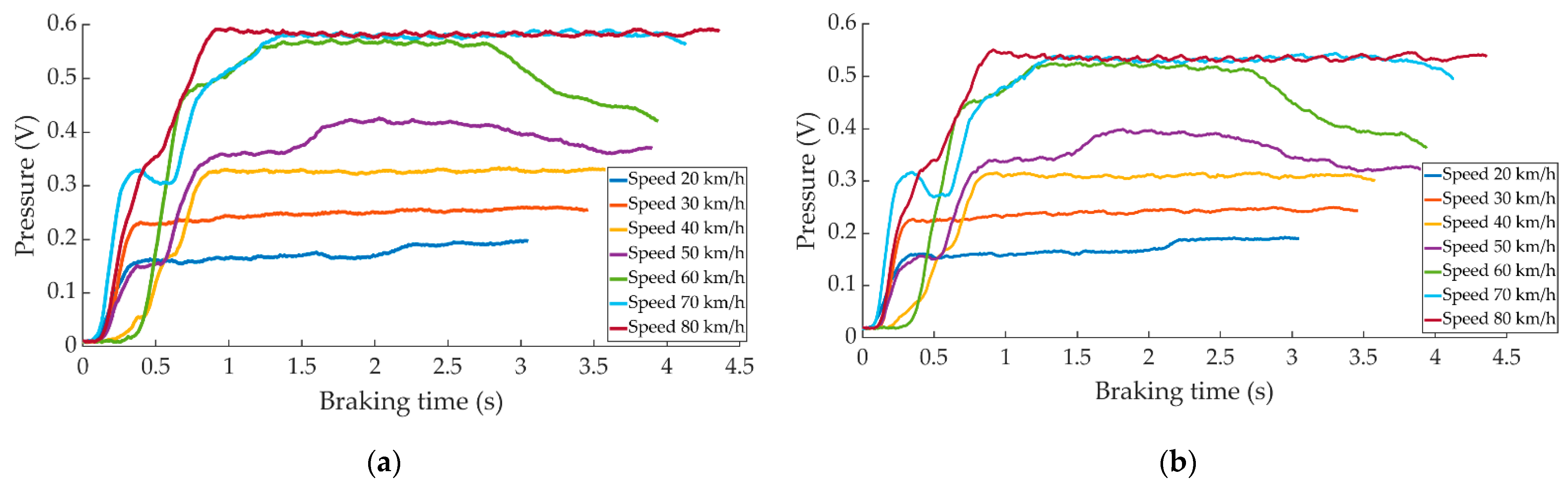
2.1.1. Pressure Sensors
2.1.2. Thermocouple
2.1.3. Load Cell
2.1.4. Data Acquisition System
2.2. Methodology of the Experimental Phase
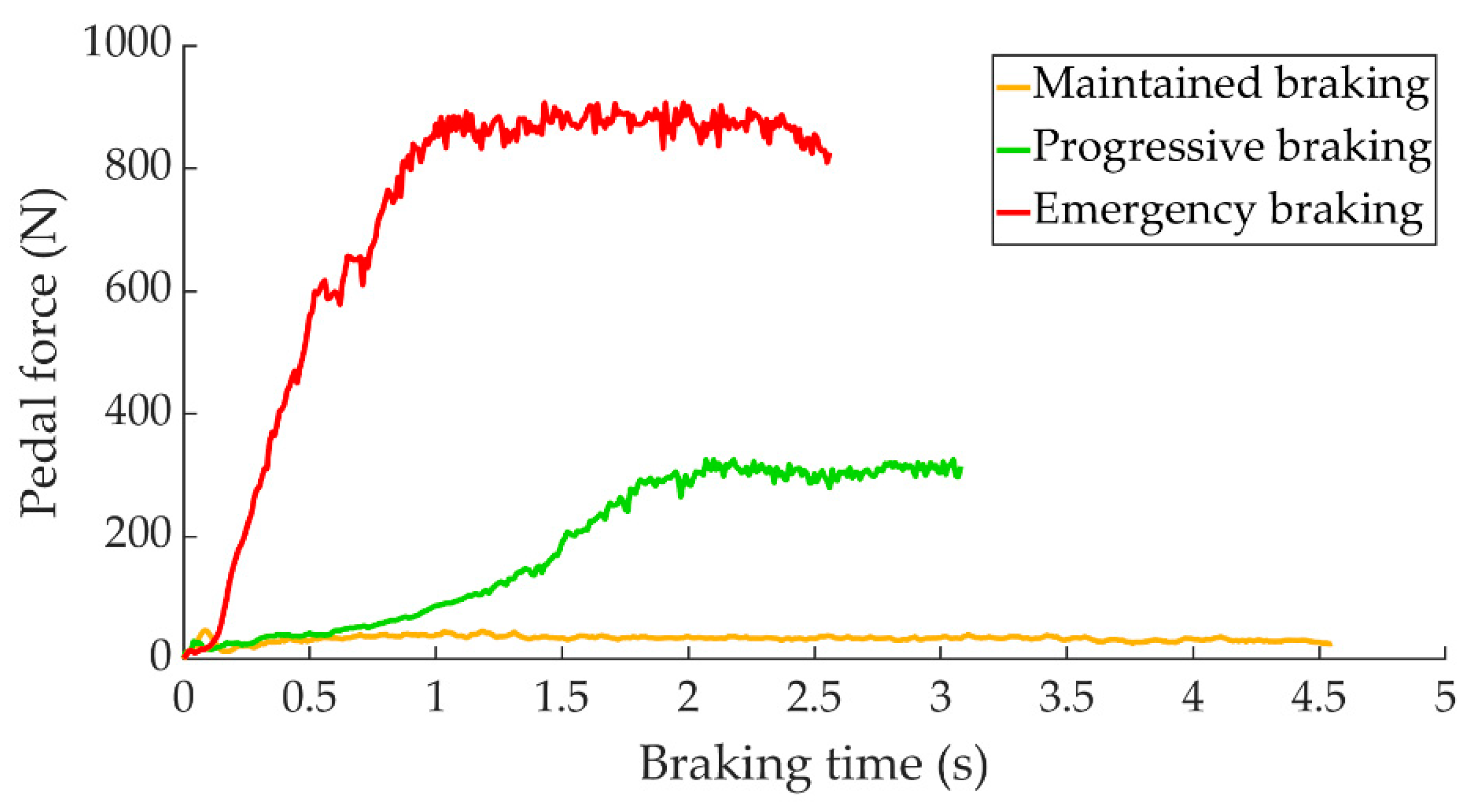
2.2.1. Types of Braking Performed in the Experimental Tests
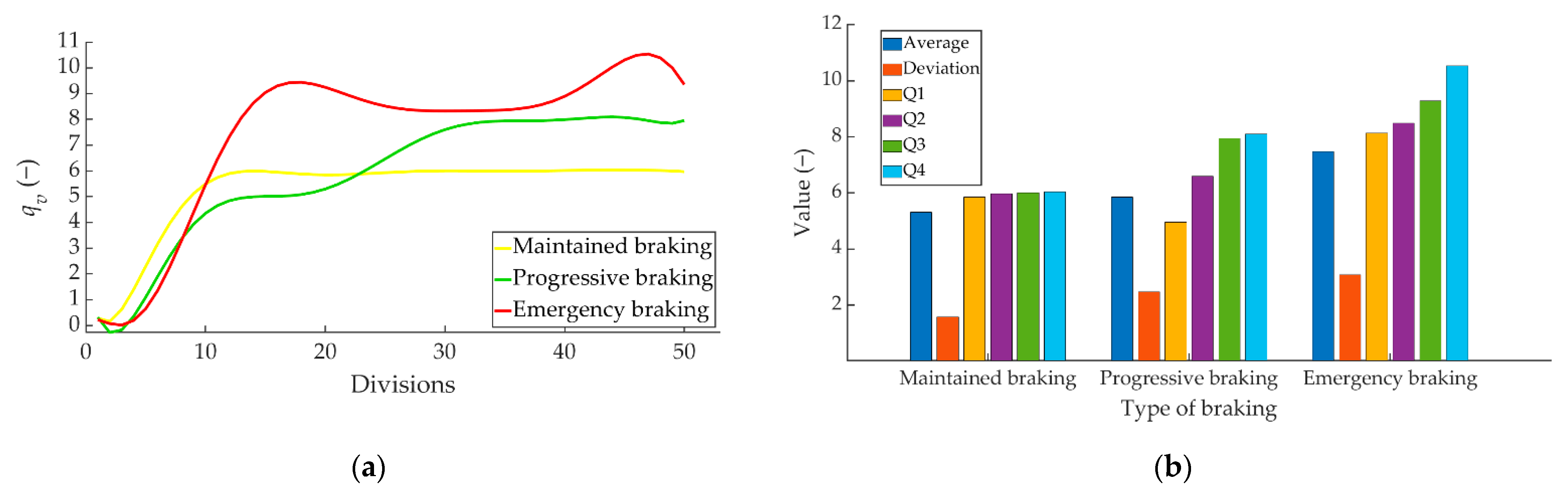
- Maintained braking
- Progressive braking
- Emergency braking
2.2.2. Variables Analysed in the Experimental Tests
- Braking time
- 2.
- Braking distance
- 3.
- Pressure in the brake circuit
2.2.3. Test Conditions
- Tyre pressure should be within the manufacturer’s recommended range for the vehicle’s load.
- The temperature range allowed on the brake disc before each braking manoeuvre must be between 18 and 31 °C.
- There shall always be a second person in the co-driver’s seat in charge of controlling the acquisition system. No other persons are allowed in the vehicle.
- The clutch must be disengaged to avoid the influence of engine retention in braking capacity.
3. Data Collected by Sensors
3.1. Output Signal of the Pressure Sensors Installed for the Driving Braking Tests
3.2. Statistical Study of the Driver Set
3.3. Methodology for Analysing Data Collected by Pressure Sensors
4. Feed-Forward Neural Networks
4.1. ANN Model
- Number of neurons in the input layer: 2.
- Number of neurons in the hidden layer: 20.
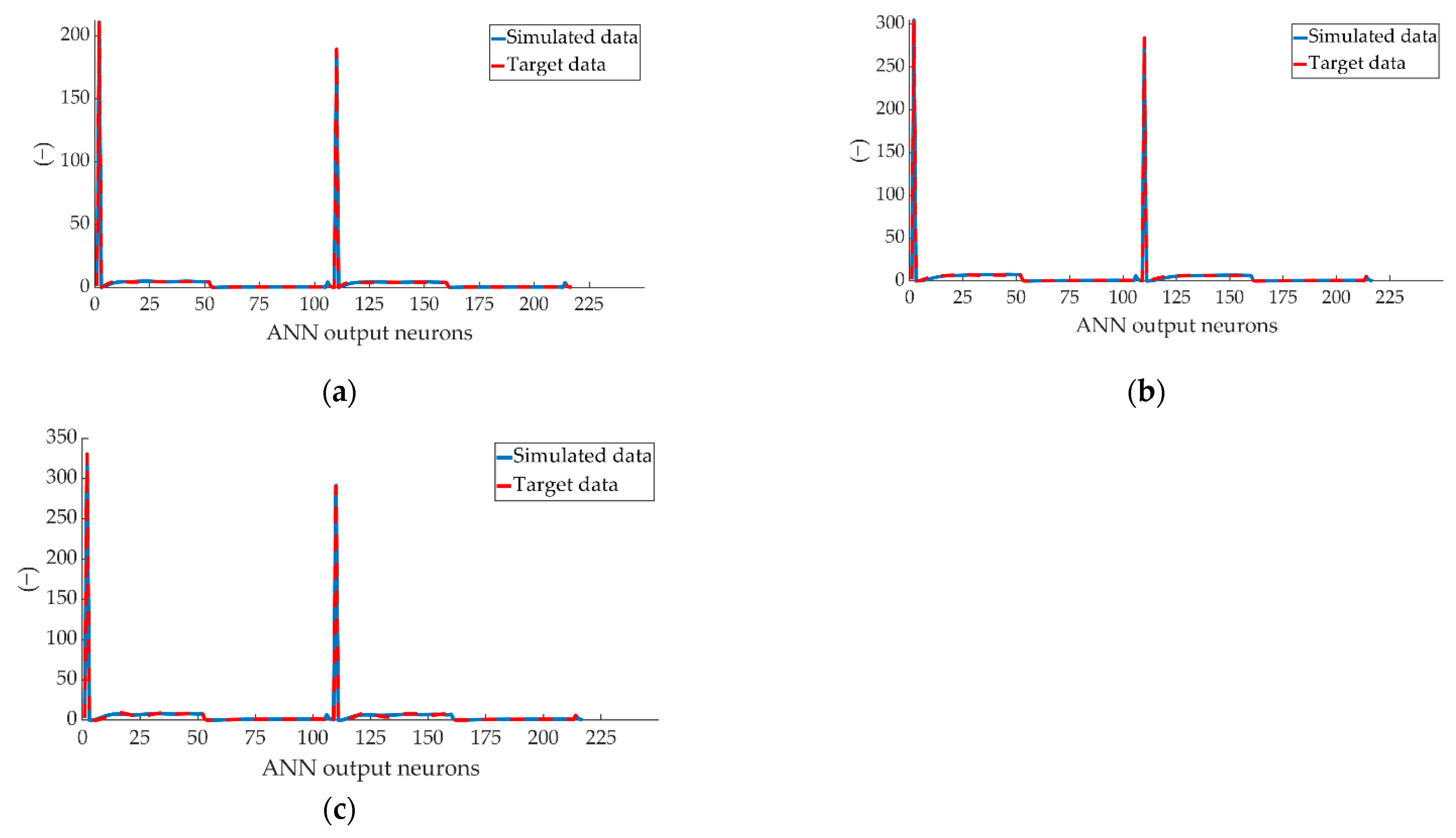
- Number of neurons in the output layer: 217.
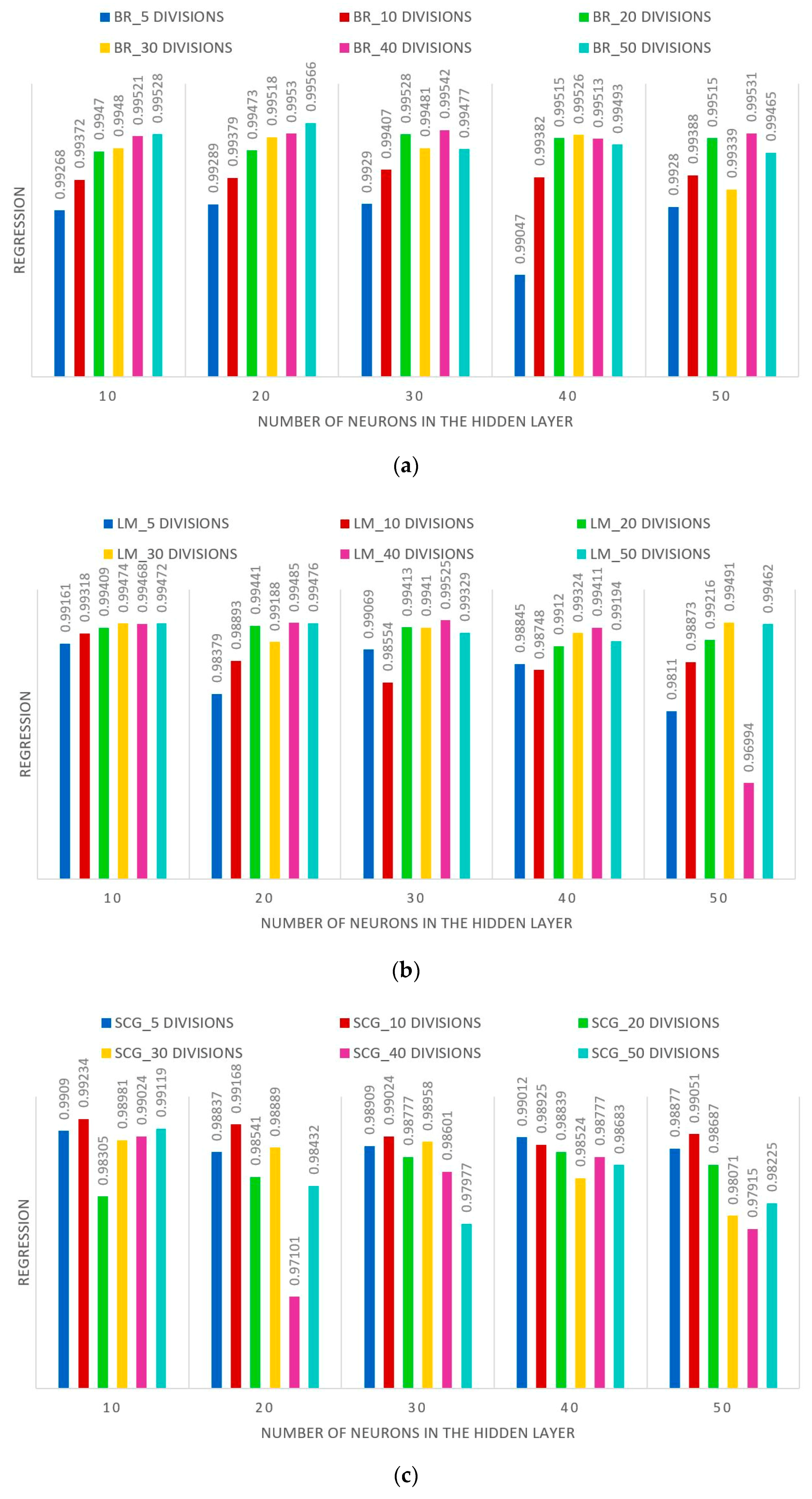
- Type of training: Bayesian Regularization.
- Divisions of the data vectors: 50.
- Position 1: Represents the type of braking that has been performed (maintained = 1, progressive = 2 or emergency = 3). It is contemplated that decimal values appear in position 1 of the output vector.
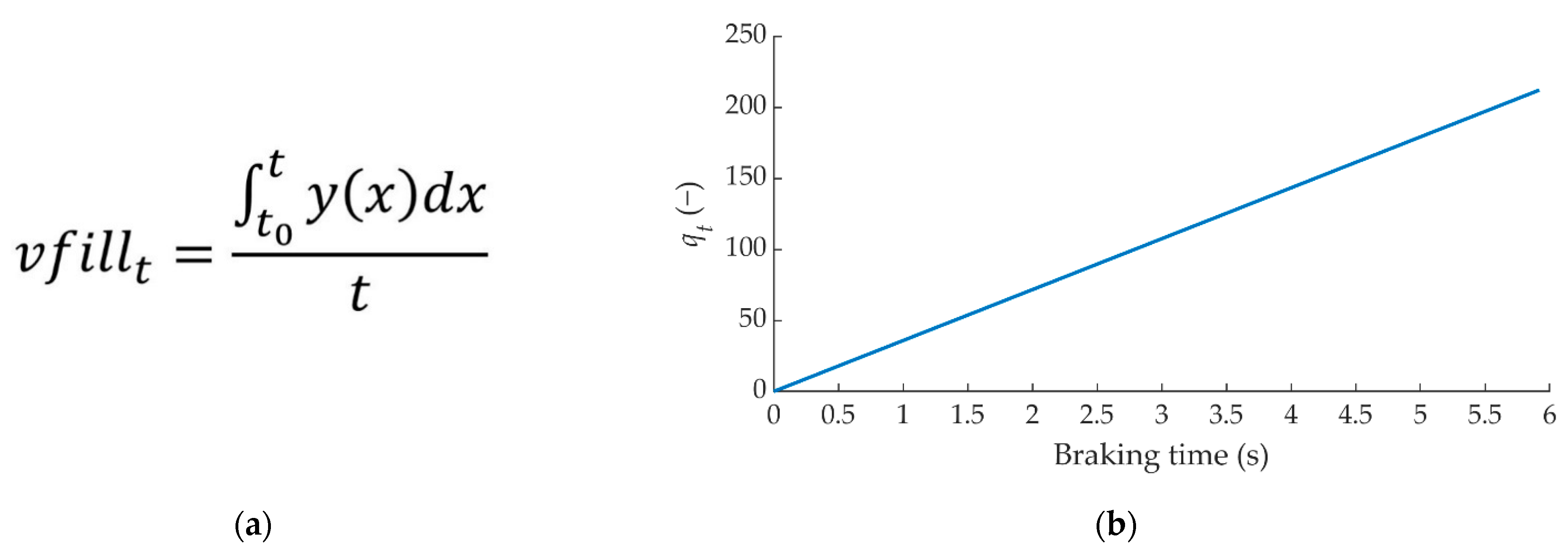
- Position 2: Represents the braking capacity value measured by the right pressure sensor (qt).
- Positions 3–52: Vector dividing by 50 the braking capacity value measured by the right pressure sensor according to the time the vehicle takes to stop (qv).
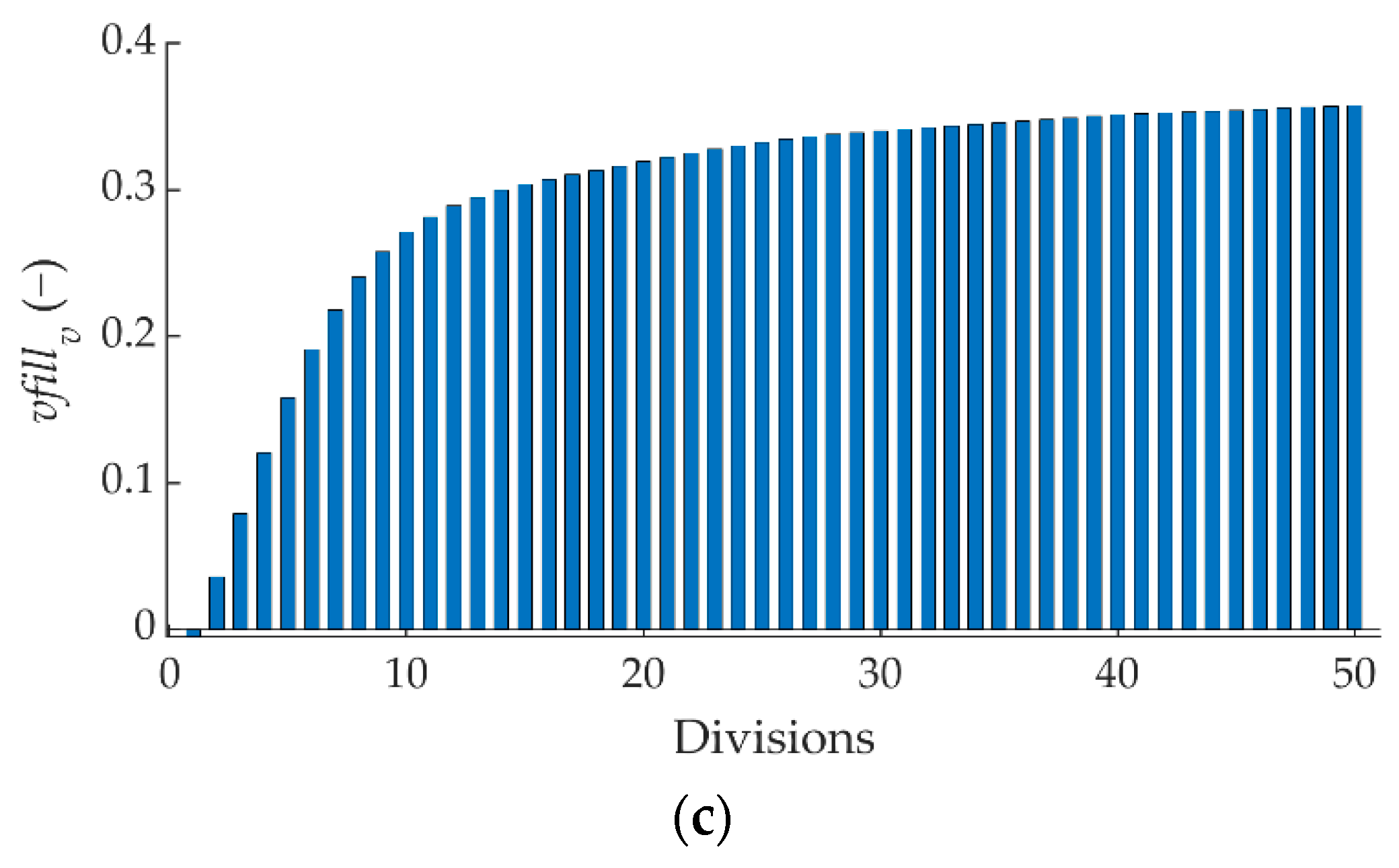
- Position 53: Represents how the right pressure sensor reaches full braking capacity, providing information on “how braking occurs over time” (vfillt).
- Position 54–103: Vector dividing by 50 the value of vfillt relative to the right pressure sensor (vfillv).
- Positions 104–109: Statistical values for braking characterisation relating to the right pressure sensor.
- Position 110: Represents the braking capacity value measured by the left pressure sensor (qt).
- Positions 111–160: Vector dividing by 50 the braking capacity value measured by the left pressure sensor according to the time the vehicle takes to stop (qv).
- Position 161: Represents how the left pressure sensor reaches full braking capacity, providing information on “how braking occurs over time” (vfillt).
- Positions 162–211: Vector dividing by 50 the value of vfillt relative to the left pressure sensor (vfillv).
- Position 212–217: Statistical values for braking characterisation relating to the left pressure sensor.
5. Results of Braking Parameter Estimation
6. Validation of Results against Direct Sensor Readings
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Kukkala, V.K.; Tunnell, J.; Pasricha, S.; Bradley, T. Advanced driver-assistance systems: A path toward autonomous vehicles. IEEE Consum. Electron. Mag. 2018, 7, 18–25. [Google Scholar] [CrossRef]
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three decades of driver assistance systems: Review and future perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- Khan, M.Q.; Lee, S. A comprehensive survey of driving monitoring and assistance systems. Sensors 2019, 19, 2574. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, J.; Yu, S.; Liu, F.; Chen, X.; Huang, H. A hierarchical prediction model for lane-changes based on combination of fuzzy C-means and adaptive neural network. Expert Syst. Appl. 2019, 130, 265–275. [Google Scholar] [CrossRef]
- Arcos-García, A.; Álvarez-García, J.A.; Soria-Morillo, L.M. Evaluation of deep neural networks for traffic sign detection systems. Neurocomputing 2018, 316, 332–344. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.; Jang, G.J.; Lee, M. Fast learning method for convolutional neural networks using extreme learning machine and its application to lane detection. Neural Netw. 2017, 87, 109–121. [Google Scholar] [CrossRef] [PubMed]
- Fleming, J.; Yan, X.; Allison, C.; Stanton, N.; Lot, R. Real-time predictive eco-driving assistance considering road geometry and long-range radar measurements. IET Intell. Transp. Syst. 2021, 15, 573–583. [Google Scholar] [CrossRef]
- Magaña, V.C.; Muñoz-Organero, M. Artemisa: A Personal Driving Assistant for Fuel Saving. IEEE Trans. Mob. Comput. 2016, 15, 2437–2451. [Google Scholar] [CrossRef] [Green Version]
- Orfila, O.; Saint Pierre, G.; Messias, M. An android based ecodriving assistance system to improve safety and efficiency of internal combustion engine passenger cars. Transp. Res. Part C Emerg. Technol. 2015, 58, 772–782. [Google Scholar] [CrossRef]
- Rommerskirchen, C.P.; Helmbrecht, M.; Bengler, K.J. The Impact of an Anticipatory Eco-Driver Assistant System in Different Complex Driving Situations on the Driver Behavior. IEEE Intell. Transp. Syst. Mag. 2014, 6, 45–56. [Google Scholar] [CrossRef]
- Gilman, E.; Keskinarkaus, A.; Tamminen, S.; Pirttikangas, S.; Röning, J.; Riekki, J. Personalised assistance for fuel-efficient driving. Transp. Res. Part C Emerg. Technol. 2015, 58, 681–705. [Google Scholar] [CrossRef] [Green Version]
- Mars, F.; Chevrel, P. Modelling human control of steering for the design of advanced driver assistance systems. Annu. Rev. Control 2017, 44, 292–302. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, J. A Novel Initiative Braking System with Nondegraded Fallback Level for ADAS and Autonomous Driving. IEEE Trans. Ind. Electron. 2019, 67, 4360–4370. [Google Scholar] [CrossRef]
- Hamid, U.Z.A.; Zakuan, F.R.A.; Zulkepli, K.A.; Azmi, M.Z.; Zamzuri, H.; Rahman, M.A.A.; Zakaria, M.A. Autonomous emergency braking system with potential field risk assessment for frontal collision mitigation. In Proceedings of the 2017 IEEE Conference on Systems, Process and Control (ICSPC), Malacca, Malaysia, 15–17 December 2017; pp. 71–76. [Google Scholar]
- Han, W.; Xiong, L.; Yu, Z. Braking Pressure Tracking Control of a Pressure Sensor Unequipped Electro-Hydraulic Booster Based on a Nonlinear Observer; SAE Technical Paper; SAE: Warrendale, PA, USA, 2018. [Google Scholar]
- Xiong, Z.; Pei, X.; Guo, X.; Zhang, C. Model-Based Pressure Control for an Electro Hydraulic Brake System on RCP Test Environment; SAE Technical Paper; SAE: Warrendale, PA, USA, 2016. [Google Scholar]
- Yong, J.W.; Gao, F.; Ding, N.G.; He, Y.P. Pressure-tracking control of a novel electro-hydraulic braking system considering friction compensation. J. Cent. South Univ. 2017, 24, 1909–1921. [Google Scholar] [CrossRef]
- Yang, X.; Li, J.; Miao, H.; Shi, Z.T. Hydraulic Pressure Control and Parameter Optimization of Integrated Electro-Hydraulic Brake System; SAE Technical Paper; SAE: Warrendale, PA, USA, 2017. [Google Scholar]
- Liu, Q.H.; Rong, Y.C. Research on Electro-Hydraulic Hybrid Brake System Combined with ABS. Appl. Mech. Mater. 2014, 543–547, 1525–1528. [Google Scholar] [CrossRef]
- Ding, N.; Zhan, X. Model-based recursive least square algorithm for estimation of brake pressure and road friction. In Proceedings of the FISITA 2012 World Automotive Congress; Springer: Berlin/Heidelberg, Germany, 2013; pp. 137–145. [Google Scholar]
- Jiang, G.; Miao, X.; Wang, Y.; Chen, J.; Li, D.; Liu, L.; Muhammad, F. Real-time estimation of the pressure in the wheel cylinder with a hydraulic control unit in the vehicle braking control system based on the extended Kalman filter. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 231, 1340–1352. [Google Scholar] [CrossRef]
- Li, L.; Song, J.; Han, Z. Hydraulic model and inverse model for electronic stability program online control system. Chin. J. Mech. Eng. 2008, 44, 139. [Google Scholar] [CrossRef]
- Yao, J.; Zhang, Y.; Wang, J. Research on algorithm of braking pressure estimating for anti-lock braking system of motorcycle. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 586–591. [Google Scholar]
- O’ Dea, K. Anti-Lock Braking Performance and Hydraulic Brake Pressure Estimation (No. 2005-01-1061); SAE Technical Paper; SAE: Warrendale, PA, USA, 2005. [Google Scholar]
- Castillo, J.J.; Cabrera, J.A.; Guerra, A.J.; Simón, A. A novel electrohydraulic brake system with tire–road friction estimation and continuous brake pressure control. IEEE Trans. Ind. Electron. 2015, 63, 1863–1875. [Google Scholar] [CrossRef]
- Lv, C.; Xing, Y.; Zhang, J.; Na, X.; Li, Y.; Liu, T.; Wang, F.Y. Levenberg–Marquardt backpropagation training of multilayer neural networks for state estimation of a safety-critical cyber-physical system. IEEE Trans. Ind. Inform. 2017, 14, 3436–3446. [Google Scholar] [CrossRef] [Green Version]
- Xing, Y.; Lv, C. Dynamic state estimation for the advanced brake system of electric vehicles by using deep recurrent neural networks. IEEE Trans. Ind. Electron. 2019, 67, 9536–9547. [Google Scholar] [CrossRef]
- Han, W.; Xiong, L.; Yu, Z. Braking pressure control in electro-hydraulic brake system based on pressure estimation with nonlinearities and uncertainties. Mech. Syst. Signal Processing 2019, 131, 703–727. [Google Scholar] [CrossRef]
- Han, W.; Xiong, L.; Yu, Z. Interconnected Pressure Estimation and Double Closed-Loop Cascade Control for an Integrated Electrohydraulic Brake System. IEEE/ASME Trans. Mechatron. 2020, 25, 2460–2471. [Google Scholar] [CrossRef]
- Shi, B.; Xiong, L.; Yu, Z. Pressure Estimation Based on Vehicle Dynamics Considering the Evolution of the Brake Linings’ Coefficient of Friction. Actuators 2021, 10, 76. [Google Scholar] [CrossRef]
- Mozaffari, S.; Al-Jarrah, O.Y.; Dianati, M.; Jennings, P.; Mouzakitis, A. Deep learning-based vehicle behavior prediction for autonomous driving applications: A review. IEEE Trans. Intell. Transp. Syst. 2020, 23, 33–47. [Google Scholar] [CrossRef]
- Zyner, A.; Worrall, S.; Nebot, E. A recurrent neural network solution for predicting driver intention at unsignalized intersections. IEEE Robot. Autom. Lett. 2018, 3, 1759–1764. [Google Scholar] [CrossRef]
- Zyner, A.; Worrall, S.; Ward, J.; Nebot, E. Long short term memory for driver intent prediction. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1484–1489. [Google Scholar]
- Phillips, D.J.; Wheeler, T.A.; Kochenderfer, M.J. Generalizable intention prediction of human drivers at intersections. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1665–1670. [Google Scholar]
- Bahari, M.; Alahi, A. Feed-forwards meet recurrent networks in vehicle trajectory prediction. In Proceedings of the Swiss Transport Research Conference (STRC), Monte Verità, Ascona, Switzerland, 15–17 May 2019. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Speed (km/h) | Type of Braking |
|---|---|
| 20 | Maintained braking Progressive braking Emergency braking |
| 30 | Maintained braking Progressive braking Emergency braking |
| 40 | Maintained braking Progressive braking Emergency braking |
| 50 | Maintained braking Progressive braking Emergency braking |
| 60 | Maintained braking Progressive braking Emergency braking |
| 70 | Maintained braking Progressive braking Emergency braking |
| 80 | Maintained braking Progressive braking Emergency braking |
| Speed (km/h) | Sensor | Maximum | Minimum | Average | Standard Deviation |
|---|---|---|---|---|---|
| 20 | Right pressure (V) | 0.618 | 0.206 | 0.410 | 0.153 |
| Left pressure (V) | 0.573 | 0.184 | 0.377 | 0.145 | |
| Braking time (s) | 3.53 | 1.25 | 2.118 | 0.697 | |
| Braking distance (m) | 10.949 | 4.031 | 6.629 | 2.105 | |
| 30 | Right pressure (V) | 0.792 | 0.264 | 0.458 | 0.173 |
| Left pressure (V) | 0.734 | 0.220 | 0.419 | 0.163 | |
| Braking time (s) | 3.73 | 1.7 | 2.901 | 0.612 | |
| Braking distance (m) | 19.215 | 8.581 | 14.292 | 3.092 | |
| 40 | Right pressure (V) | 0.799 | 0.328 | 0.549 | 0.164 |
| Left pressure (V) | 0.740 | 0.293 | 0.507 | 0.156 | |
| Braking time (s) | 4.71 | 1.98 | 3.3 | 0.699 | |
| Braking distance (m) | 31.757 | 12.136 | 21.376 | 4.967 | |
| 50 | Right pressure (V) | 1.165 | 0.411 | 0.643 | 0.225 |
| Left pressure (V) | 1.082 | 0.375 | 0.594 | 0.211 | |
| Braking time (s) | 5.44 | 2.45 | 3.847 | 0.884 | |
| Braking distance (m) | 40.604 | 17.194 | 29.967 | 7.311 | |
| 60 | Right pressure (V) | 1.530 | 0.519 | 0.774 | 0.351 |
| Left pressure (V) | 1.388 | 0.478 | 0.709 | 0.317 | |
| Braking time (s) | 5.5 | 2.75 | 3.917 | 0.751 | |
| Braking distance (m) | 49.273 | 24.040 | 37.255 | 6.631 | |
| 70 | Right pressure (V) | 1.586 | 0.584 | 0.803 | 0.279 |
| Left pressure (V) | 1.481 | 0.536 | 0.739 | 0.262 | |
| Braking time (s) | 5.93 | 2.34 | 4.259 | 0.885 | |
| Braking distance (m) | 61.163 | 26.138 | 45.701 | 9.021 | |
| 80 | Right pressure (V) | 1.679 | 0.652 | 0.942 | 0.374 |
| Left pressure (V) | 1.596 | 0.595 | 0.868 | 0.353 | |
| Braking time (s) | 6.23 | 3 | 4.426 | 0.869 | |
| Braking distance (m) | 76.692 | 38.014 | 54.596 | 10.266 |
| Speed (km/h) | Sensor | Maximum | Minimum | Average | Standard Deviation |
|---|---|---|---|---|---|
| 20 | Right pressure (V) | 0.720 | 0.334 | 0.502 | 0.118 |
| Left pressure (V) | 0.670 | 0.312 | 0.466 | 0.110 | |
| Braking time (s) | 2.6 | 1.58 | 2.029 | 0.357 | |
| Braking distance (m) | 8.075 | 5.505 | 6.423 | 0.841 | |
| 30 | Right pressure (V) | 0.929 | 0.418 | 0.639 | 0.150 |
| Left pressure (V) | 0.864 | 0.391 | 0.595 | 0.141 | |
| Braking time (s) | 3.09 | 1.88 | 2.323 | 0.348 | |
| Braking distance (m) | 15.135 | 8.688 | 11.378 | 1.915 | |
| 40 | Right pressure (V) | 1.177 | 0.540 | 0.817 | 0.222 |
| Left pressure (V) | 1.066 | 0.502 | 0.755 | 0.200 | |
| Braking time (s) | 3.3 | 2.07 | 2.568 | 0.398 | |
| Braking distance (m) | 24.314 | 12.955 | 17.186 | 3.197 | |
| 50 | Right pressure (V) | 1.349 | 0.571 | 0.959 | 0.255 |
| Left pressure (V) | 1.259 | 0.526 | 0.888 | 0.233 | |
| Braking time (s) | 4.12 | 2.27 | 2.845 | 0.522 | |
| Braking distance (m) | 33.805 | 18.447 | 23.480 | 4.075 | |
| 60 | Right pressure (V) | 1.597 | 0.641 | 1.044 | 0.342 |
| Left pressure (V) | 1.488 | 0.599 | 0.966 | 0.309 | |
| Braking time (s) | 3.87 | 2.4 | 3.196 | 0.545 | |
| Braking distance (m) | 41.490 | 22.292 | 31.409 | 5.698 | |
| 70 | Right pressure (V) | 1.983 | 0.731 | 1.265 | 0.450 |
| Left pressure (V) | 1.701 | 0.702 | 1.161 | 0.391 | |
| Braking time (s) | 4.5 | 2.18 | 3.377 | 0.714 | |
| Braking distance (m) | 49.581 | 23.706 | 37.905 | 8.934 | |
| 80 | Right pressure (V) | 1.992 | 0.807 | 1.379 | 0.404 |
| Left pressure (V) | 1.814 | 0.748 | 1.243 | 0.329 | |
| Braking time (s) | 4.58 | 2.52 | 3.415 | 0.596 | |
| Braking distance (m) | 58.596 | 26.537 | 43.271 | 9.542 |
| Speed (km/h) | Sensor | Maximum | Minimum | Average | Standard Deviation |
|---|---|---|---|---|---|
| 20 | Right pressure (V) | 1.871 | 0.759 | 1.286 | 0.479 |
| Left pressure (V) | 1.749 | 0.701 | 1.197 | 0.446 | |
| Braking time (s) | 1.15 | 0.64 | 0.952 | 0.153 | |
| Braking distance (m) | 4.148 | 2.321 | 3.202 | 0.613 | |
| 30 | Right pressure (V) | 1.879 | 1.01 | 1.471 | 0.374 |
| Left pressure (V) | 1.786 | 0.937 | 1.374 | 0.321 | |
| Braking time (s) | 1.5 | 1 | 1.266 | 0.132 | |
| Braking distance (m) | 8.337 | 5.004 | 6.176 | 0.947 | |
| 40 | Right pressure (V) | 1.958 | 0.997 | 1.687 | 0.305 |
| Left pressure (V) | 1.894 | 0.904 | 1.527 | 0.278 | |
| Braking time (s) | 2.01 | 1.28 | 1.607 | 0.218 | |
| Braking distance (m) | 15.594 | 8.649 | 10.494 | 2.198 | |
| 50 | Right pressure (V) | 1.986 | 1.235 | 1.737 | 0.235 |
| Left pressure (V) | 1.942 | 1.122 | 1.635 | 0.244 | |
| Braking time (s) | 2.04 | 1.71 | 1.887 | 0.092 | |
| Braking distance (m) | 17.149 | 13.480 | 14.848 | 1.159 | |
| 60 | Right pressure (V) | 2.014 | 1.476 | 1.875 | 0.149 |
| Left pressure (V) | 1.946 | 1.360 | 1.709 | 0.156 | |
| Braking time (s) | 3.01 | 1.98 | 2.4 | 0.266 | |
| Braking distance (m) | 28.524 | 17.495 | 21.891 | 3.187 | |
| 70 | Right pressure (V) | 2.245 | 1.768 | 1.999 | 0.148 |
| Left pressure (V) | 2.055 | 1.637 | 1.798 | 0.122 | |
| Braking time (s) | 2.67 | 2.36 | 2.523 | 0.098 | |
| Braking distance (m) | 27.838 | 24.990 | 26.264 | 1.103 | |
| 80 | Right pressure (V) | 2.351 | 1.312 | 2.001 | 0.244 |
| Left pressure (V) | 2.164 | 1.155 | 1.785 | 0.251 | |
| Braking time (s) | 2.93 | 2.51 | 2.677 | 0.121 | |
| Braking distance (m) | 39.404 | 28.348 | 32.543 | 3.523 |
| Test Speed (km/h) | Tb Target | Tb ANN | Error Tb (%) | qt pr Target (−) | qt pl Target (−) | qt pr ANN (−) | qt pl ANN (−) | Error qt pr (%) | Error qt pl (%) |
|---|---|---|---|---|---|---|---|---|---|
| 20 | 1 | 1.198 | 19.790 | 61.666 | 55.066 | 62.325 | 51.528 | 1.068 | 6.426 |
| 30 | 1 | 1.267 | 26.690 | 83.841 | 76.920 | 83.896 | 74.716 | 0.066 | 2.866 |
| 40 | 1 | 1.339 | 33.870 | 144.547 | 132.640 | 143.452 | 132.713 | 0.758 | 0.055 |
| 50 | 1 | 1.268 | 26.780 | 176.539 | 161.390 | 175.466 | 163.674 | 0.608 | 1.415 |
| 60 | 1 | 1.273 | 27.340 | 196.110 | 176.927 | 200.004 | 182.471 | 1.986 | 3.134 |
| 70 | 1 | 0.934 | 6.640 | 212.132 | 189.399 | 210.982 | 189.003 | 0.542 | 0.209 |
| 80 | 1 | 0.799 | 20.060 | 256.899 | 224.802 | 257.644 | 224.558 | 0.290 | 0.109 |
| 20 | 2 | 1.839 | 8.075 | 68.920 | 64.861 | 67.529 | 63.509 | 2.018 | 2.084 |
| 30 | 2 | 2.175 | 8.755 | 91.568 | 85.262 | 91.926 | 85.583 | 0.391 | 0.376 |
| 40 | 2 | 2.345 | 17.255 | 149.352 | 139.339 | 149.797 | 138.186 | 0.298 | 0.827 |
| 50 | 2 | 1.749 | 12.560 | 174.557 | 162.725 | 174.978 | 162.466 | 0.241 | 0.160 |
| 60 | 2 | 1.931 | 3.475 | 256.852 | 237.602 | 242.019 | 228.535 | 5.775 | 3.816 |
| 70 | 2 | 1.899 | 5.040 | 304.726 | 284.060 | 304.717 | 283.668 | 0.003 | 0.138 |
| 80 | 2 | 1.872 | 6.425 | 351.586 | 315.649 | 347.118 | 316.410 | 1.271 | 0.241 |
| 20 | 3 | 2.302 | 23.283 | 84.704 | 80.895 | 79.247 | 73.292 | 6.443 | 9.399 |
| 30 | 3 | 2.694 | 10.213 | 121.171 | 108.838 | 122.686 | 114.119 | 1.250 | 4.852 |
| 40 | 3 | 2.502 | 16.610 | 153.193 | 141.558 | 149.638 | 138.841 | 2.321 | 1.920 |
| 50 | 3 | 2.850 | 5.010 | 218.325 | 193.090 | 216.281 | 194.676 | 0.936 | 0.821 |
| 60 | 3 | 2.656 | 11.470 | 284.893 | 256.028 | 282.748 | 258.274 | 0.753 | 0.877 |
| 70 | 3 | 2.560 | 14.673 | 330.512 | 289.901 | 328.298 | 291.454 | 0.670 | 0.536 |
| 80 | 3 | 2.723 | 9.220 | 367.199 | 333.607 | 365.160 | 331.577 | 0.555 | 0.609 |
| Test Speed (km/h) | Tb | vfillt pr Target (−) | vfillt pl Target (−) | vfillt pr ANN (−) | vfillt pl ANN (−) | Error vfillt pr (%) | Error vfillt pl (%) |
|---|---|---|---|---|---|---|---|
| 20 | 1 | 0.453 | 0.420 | 0.461 | 0.430 | 1.674 | 2.306 |
| 30 | 1 | 0.448 | 0.408 | 0.412 | 0.384 | 8.110 | 5.841 |
| 40 | 1 | 0.315 | 0.284 | 0.307 | 0.279 | 2.699 | 1.759 |
| 50 | 1 | 0.354 | 0.324 | 0.339 | 0.307 | 4.191 | 5.244 |
| 60 | 1 | 0.484 | 0.437 | 0.478 | 0.437 | 1.306 | 0.081 |
| 70 | 1 | 0.358 | 0.319 | 0.387 | 0.358 | 8.295 | 12.057 |
| 80 | 1 | 0.412 | 0.361 | 0.405 | 0.370 | 1.736 | 2.456 |
| 20 | 2 | 0.428 | 0.403 | 0.433 | 0.404 | 1.150 | 0.332 |
| 30 | 2 | 0.430 | 0.400 | 0.453 | 0.424 | 5.463 | 5.962 |
| 40 | 2 | 0.692 | 0.645 | 0.745 | 0.694 | 7.579 | 7.675 |
| 50 | 2 | 0.619 | 0.577 | 0.626 | 0.580 | 1.099 | 0.548 |
| 60 | 2 | 0.895 | 0.828 | 0.847 | 0.774 | 5.392 | 6.545 |
| 70 | 2 | 0.896 | 0.835 | 0.950 | 0.860 | 5.952 | 2.960 |
| 80 | 2 | 0.623 | 0.581 | 0.616 | 0.568 | 1.011 | 2.310 |
| 20 | 3 | 0.538 | 0.510 | 0.530 | 0.495 | 1.475 | 2.893 |
| 30 | 3 | 0.927 | 0.817 | 0.892 | 0.829 | 3.795 | 1.418 |
| 40 | 3 | 0.876 | 0.747 | 0.853 | 0.793 | 2.644 | 6.233 |
| 50 | 3 | 1.200 | 1.061 | 1.110 | 1.021 | 7.485 | 3.792 |
| 60 | 3 | 1.217 | 1.094 | 1.170 | 1.065 | 3.942 | 2.663 |
| 70 | 3 | 1.306 | 1.146 | 1.251 | 1.129 | 4.254 | 1.454 |
| 80 | 3 | 1.429 | 1.298 | 1.373 | 1.236 | 3.898 | 4.752 |
| Tb | Mean Error Tb (%) | Mean Error qt pr (%) | Mean Error qt pl (%) | Mean Error vfillt pr (%) | Mean Error vfillt pl (%) |
|---|---|---|---|---|---|
| 1 | 23.024 | 0.760 | 2.030 | 4.002 | 4.249 |
| 2 | 8.798 | 1.428 | 1.092 | 3.949 | 3.762 |
| 3 | 12.926 | 1.847 | 2.716 | 3.927 | 3.315 |
| Total | 14.916 | 1.345 | 1.946 | 3.959 | 3.775 |
| Tb | Standard Deviation Tb (%) | Standard Deviation qt pr (%) | Standard Deviation qt pl (%) | Standard Deviation vfillt pr (%) | Standard Deviation vfillt pl (%) |
|---|---|---|---|---|---|
| 1 | 8.675 | 0.629 | 2.328 | 3.024 | 3.980 |
| 2 | 4.731 | 2.044 | 1.384 | 2.773 | 2.965 |
| 3 | 5.913 | 2.113 | 3.317 | 1.846 | 1.755 |
| Total | 6.439 | 1.595 | 2.343 | 2.548 | 2.900 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garrosa, M.; Olmeda, E.; Díaz, V.; Mendoza-Petit, M.F. Design of an Estimator Using the Artificial Neural Network Technique to Characterise the Braking of a Motor Vehicle. Sensors 2022, 22, 1644. https://doi.org/10.3390/s22041644
Garrosa M, Olmeda E, Díaz V, Mendoza-Petit MF. Design of an Estimator Using the Artificial Neural Network Technique to Characterise the Braking of a Motor Vehicle. Sensors. 2022; 22(4):1644. https://doi.org/10.3390/s22041644
Chicago/Turabian StyleGarrosa, María, Ester Olmeda, Vicente Díaz, and Mᵃ Fernanda Mendoza-Petit. 2022. "Design of an Estimator Using the Artificial Neural Network Technique to Characterise the Braking of a Motor Vehicle" Sensors 22, no. 4: 1644. https://doi.org/10.3390/s22041644
APA StyleGarrosa, M., Olmeda, E., Díaz, V., & Mendoza-Petit, M. F. (2022). Design of an Estimator Using the Artificial Neural Network Technique to Characterise the Braking of a Motor Vehicle. Sensors, 22(4), 1644. https://doi.org/10.3390/s22041644