Interest in high-performance power transmission components, such as clutches, has recently been increasing owing to the demands for high-quality power transmission systems. Most power transmission components use multiplate friction clutches to provide high power and smooth transmission characteristics; however, noise and vibration are generated by the friction between the clutch disc and plate, potentially decreasing rider comfort. Research and development of new friction clutch systems is therefore actively underway to address this shortcoming, and has to date primarily focused on improving the control methods and reducing friction noise and vibration using algorithms. For example, Vasca et al. proposed a torque transmission model for a dry clutch that applied the effect of clutch spring characteristics [
1]; Jibin et al. analyzed the effects of contact angle and drag torque according to the friction plate pattern and wet clutch spacing [
2]; Agostino et al. applied various slip control methods to realize the soft combination of dry clutch and power [
3]; and Desmidt et al. analyzed a power transmission system to propose a weight optimization method for a multiplate clutch in a two-speed rotorcraft transmission [
4]. As demonstrated by these examples, many studies have attempted to realize smooth clutch fastening, but it remains impossible to ideally reduce the shock and vibration that occur during the clutch fastening process. New control methods and materials to address this issue are therefore the subject of intense ongoing research.
One such material, magnetorheological (MR) fluid increases its resistance to flow under a magnetic field load. As the yield stress of the MR fluid changes according to the applied magnetic field, efforts have been undertaken to apply it in a wide variety of systems, including dampers, valves, mounts, clutches, and brakes. Two MR fluid modes have been widely used to date according to the fluid stimulation mechanism and relative motion. The first is the flow mode, in which the fluid moves through fixed stimuli (such as in a damper, valve, or mount); in this mode, changes in the pressure and flow rate of the fluid in a pipe occur simultaneously. The second is the shear mode or rotational shear mode, in which the fluid passes between two parallel plates, one of which is fixed and the other of which rotates or moves (such as in clutch or brake systems). Notably, Mukhopadhyay et al. investigated the effect of plate orientation on MR fluid behavior in shear mode under a magnetic field [
5].
Ongoing research on MR fluids has improved their performance to the extent that they have been successfully applied in various clutches. Neelakantan and Washington proposed a method applying the MR sponge concept to solve problems related to the centrifuging of the MR fluid owing to clutch rotation [
6]. Benetti and Dragoni performed design and electromagnetic field analyses to develop a 100 Nm-class multiplate MR brake [
7]. Gratzer et al. suggested an efficient MR clutch that combined the clutch design for an all-wheel drive vehicle with fluid development and magnetic circuit optimization [
8]. Kikuchi et al. suggested a design method for an MR multiplate clutch with a 50 μm MR fluid layer between the input and output plates, and presented the results of an experimental evaluation [
9]. Zhang et al. proposed a design method using nondimensional parameters for a large-capacity MR single-plate clutch [
10]. Güth et al. suggested a new design concept combining a variable-speed electric actuator and MR clutch [
11]. Törőcsik studied the transmission torque and corresponding power consumption according to the number and thickness of plates used in an MR multiplate clutch [
12]. Wang et al. proposed a mechanical method for increasing the number of plates to generate a high transmission torque with an MR multiplate clutch [
13]. Kavlicoglu et al. analyzed the output torque of a single-plate clutch employing an MR grease with six different iron particle sizes [
14]; they also developed a double-plate prototype of an MR clutch after conducting a performance design using a variable torque range according to changes in input current [
15]. Thakur and Sarkar proposed a simulation-based method to estimate the maximum transmission torque and response time of an MR clutch using the shear mode of the MR fluid [
16]. Yadmellat et al. presented simulation and experimental results describing the performance of an MR clutch using the Preisach model, constituting a hysteresis model approach [
17]. Bucchi et al. suggested a method for improving torque characteristics by applying a neural network to an MR clutch controller [
18]. Pilch proposed an MR fluid for an optimal clutch design based on simulation results to realize variable controllability according to temperature [
19]. Leong et al. proposed a method for the design of a magnetic coupler to amplify axial speed using magnetic attraction [
20]. Fernando suggested the use of magnetic field modulation and an EM clutch slip controller through d–q current control [
21]. Kavlicoglu et al. proposed a design and slip controller for a multiplate limited-slip differential clutch to achieve high torque transmission using an MR fluid [
22]. Rizzo et al. proposed a method to improve the transmission torque of an MR fluid clutch using the eddy current induced in the conduction region by relative rotation [
23]. Latha et al. proposed MR fluid coupler type multiplate clutch to overcome mechanical friction [
24]. Olszak et al. designed a hydrodynamic clutch that incorporated an MR fluid and presented the results of simulations and experiments considering friction loss [
25]. Zhang et al. designed the magnetic field structure of a new dual clutch and suggested a relationship between torque and current using a finite element analysis [
26]. Finally, Kluszczynski and Pilch compared the clutch torque per total volume from the perspectives of torque, diameter, external length, and ratio according to the number of plates in an MR clutch [
27].
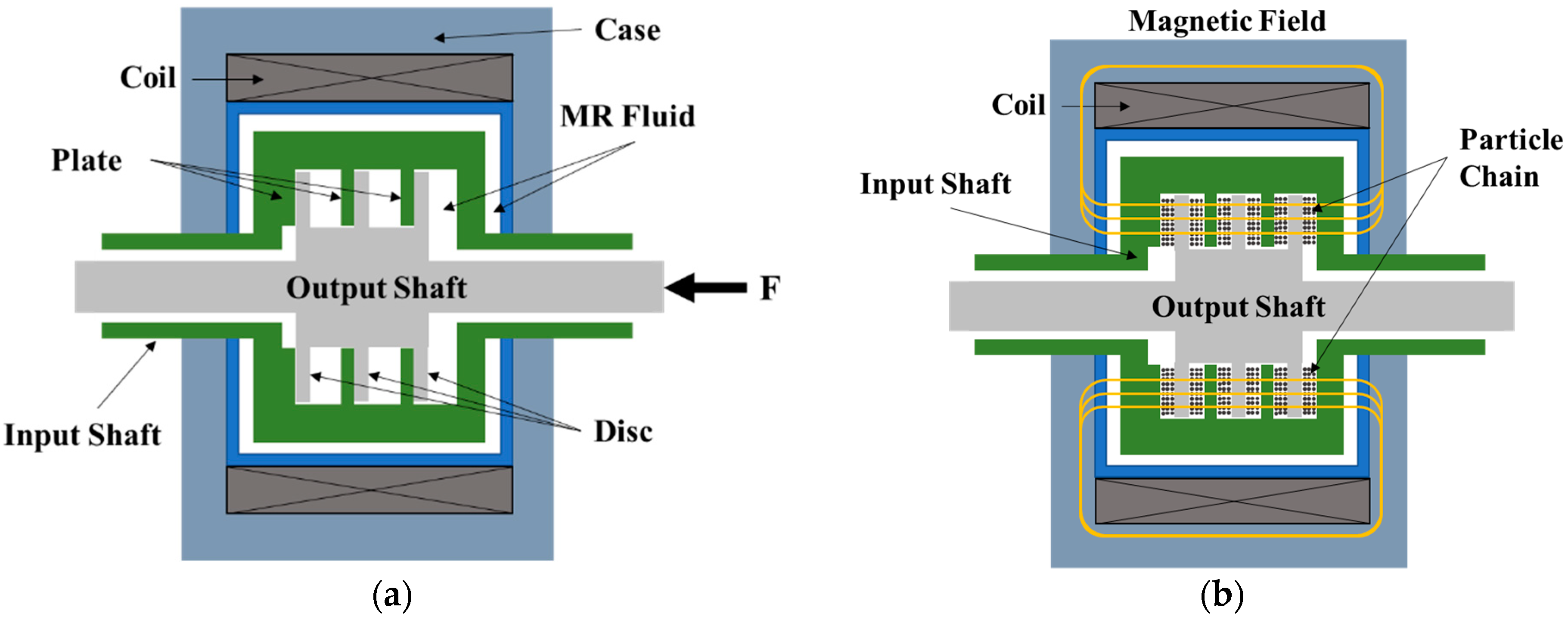
Recently, Park et al. developed an MR fluid-based multiplate clutch that provided the advantages of both magnetic field control mode and mechanical friction mode, a notable advance beyond the conventional MR multiplate clutch, which only supports magnetic field control mode [
28]. An optimal design of this clutch was previously achieved using torque modeling of mechanical friction mode and an electromagnetic field analysis of magnetic field control mode, and its performance was evaluated in each mode. However, torque tracking control employing both the magnetic field control and mechanical friction modes has yet to be evaluated for the proposed clutch.
Indeed, the following outstanding research issues related to MR clutches were identified by the authors:
Therefore, in this study, the rotational shear mode—a characteristic of the MR fluid—was used to realize the magnetic field control of a multi-plate MR clutch, while the operation mode of a conventional friction clutch was used to realize the mechanical friction mode. To do so, torque modeling and electromagnetic field analysis of the MR single-plate clutch were performed, and the transmission torque was identified by fabricating a prototype multi-plate clutch. The applied current and compression forces were then controlled to investigate its torque tracking performance using an algorithm designed to realize smooth multi-plate MR clutch operation.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}