
A Distributed Algorithm for Real-Time Multi-Drone Collision-Free Trajectory Replanning


Abstract
:1. Introduction
2. Problem Formulation
| Algorithm 1 Distributed Trajectory Generation Framework |
|
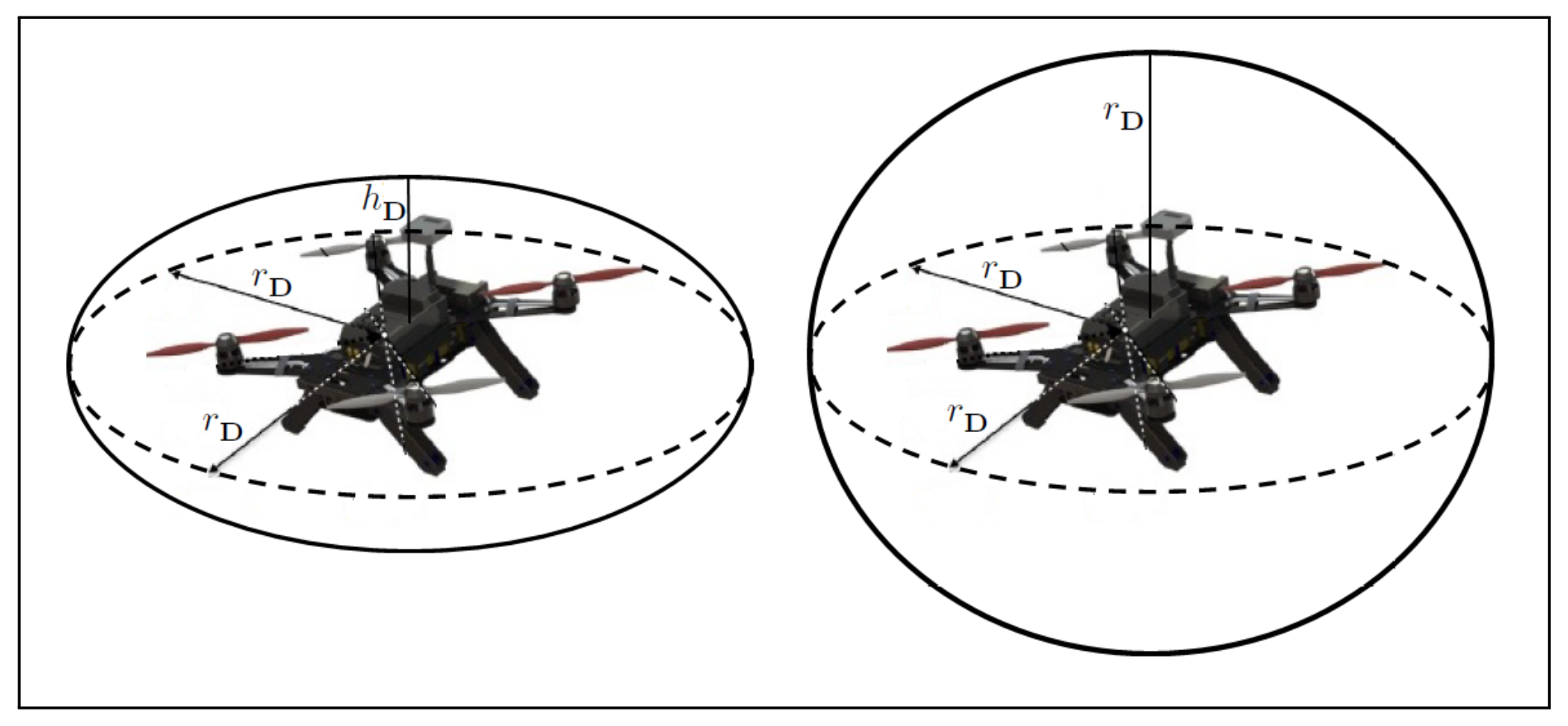
2.1. Quadrotor Model
Trajectory Parametrization
2.2. Collision Avoidance
Distributed Collision Avoidance
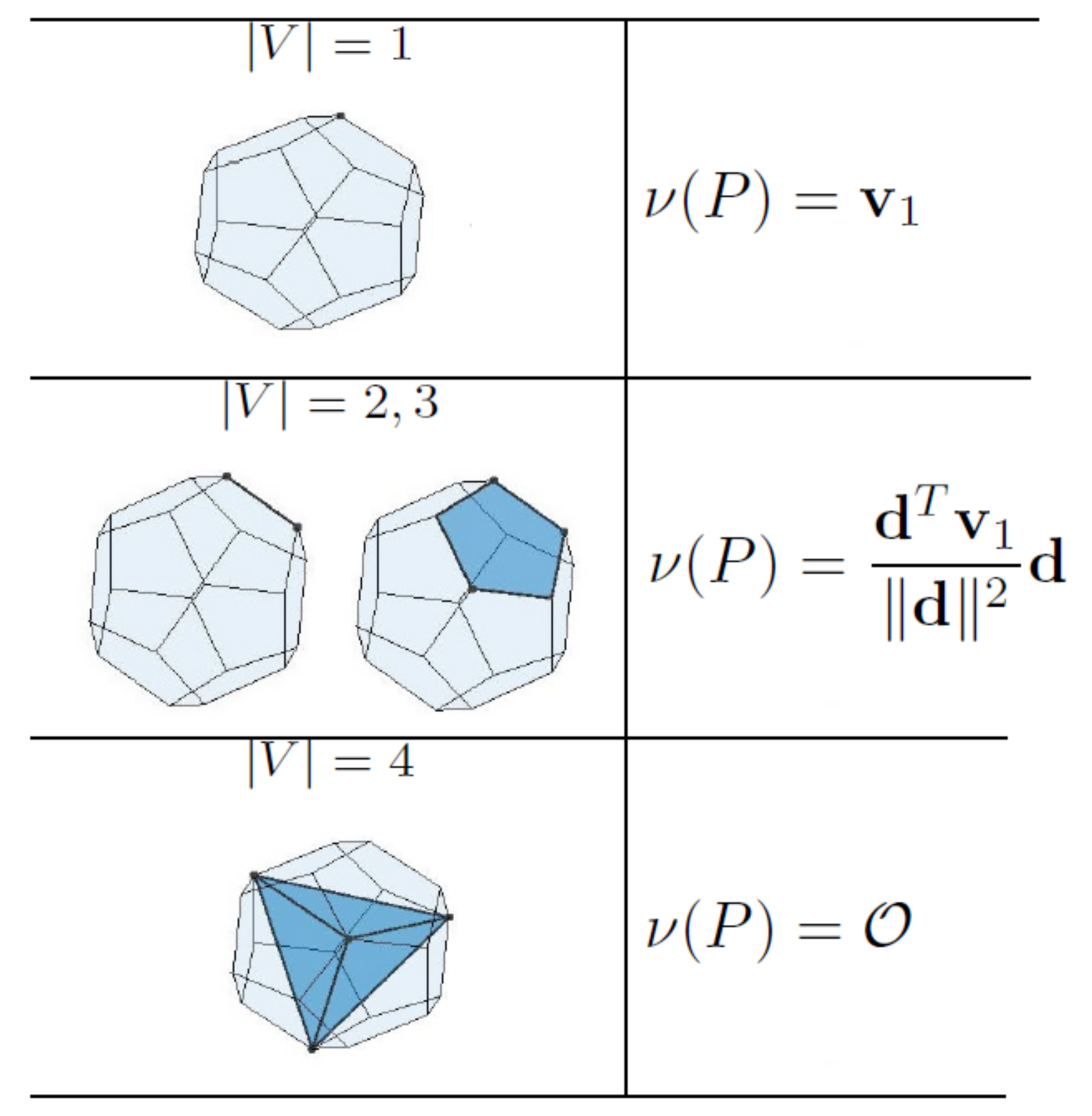
2.3. Finding the Closest Point to the Goal Position
| Algorithm 2 Compute the closest point of P to the origin |
1 One of the three subroutines S1D, S2D or S3D is called in accordance with . |
| Algorithm 3 Sub-routine for |
1 The input is the ordered list of vertices, with being the last added element to . |
| Algorithm 4 Sub-routine for |
|
| Algorithm 5 Sub-routine for |
|
3. Bézier Curves
3.1. Continuity Conditions
3.2. Evaluating Inequalities in Bézier Form
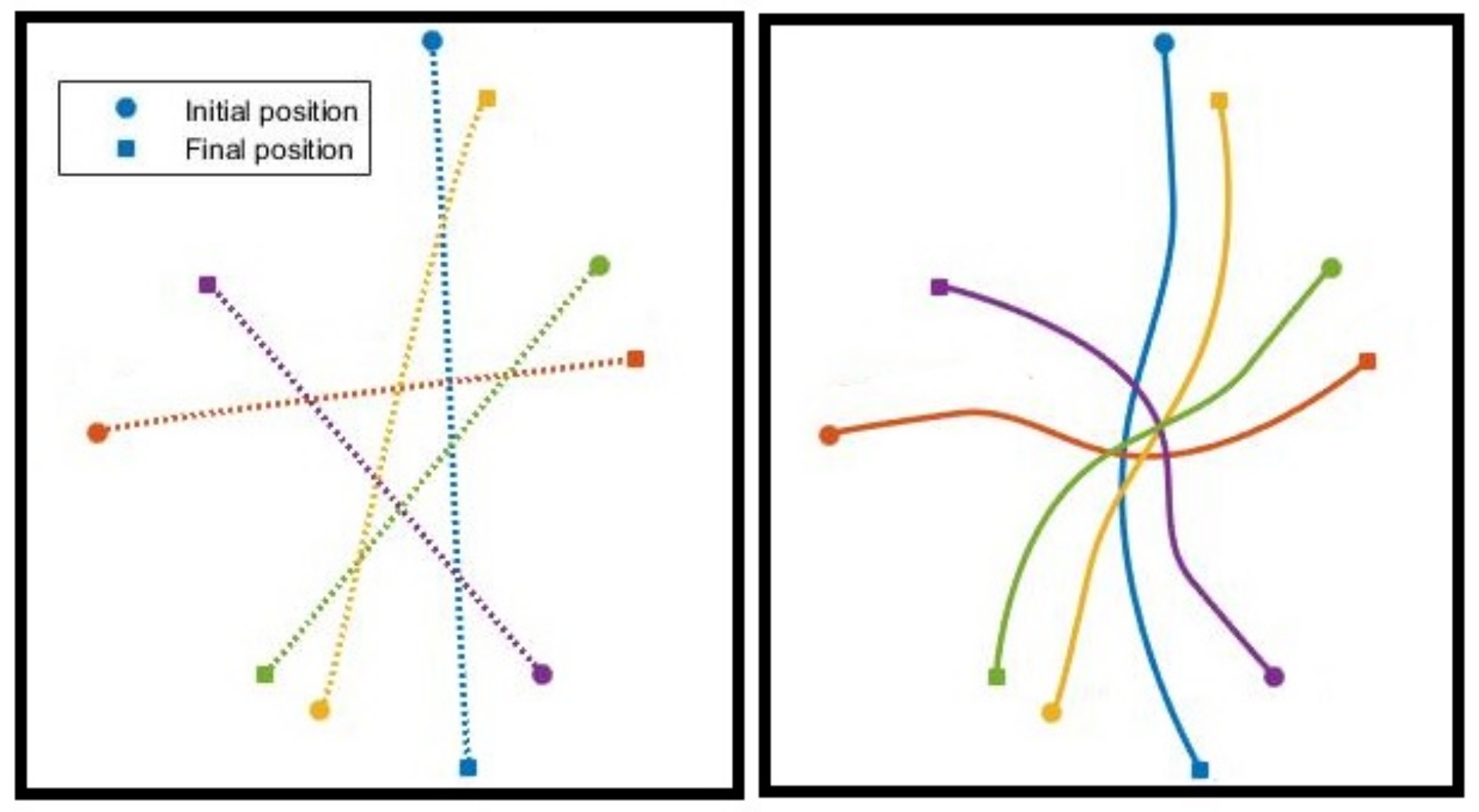
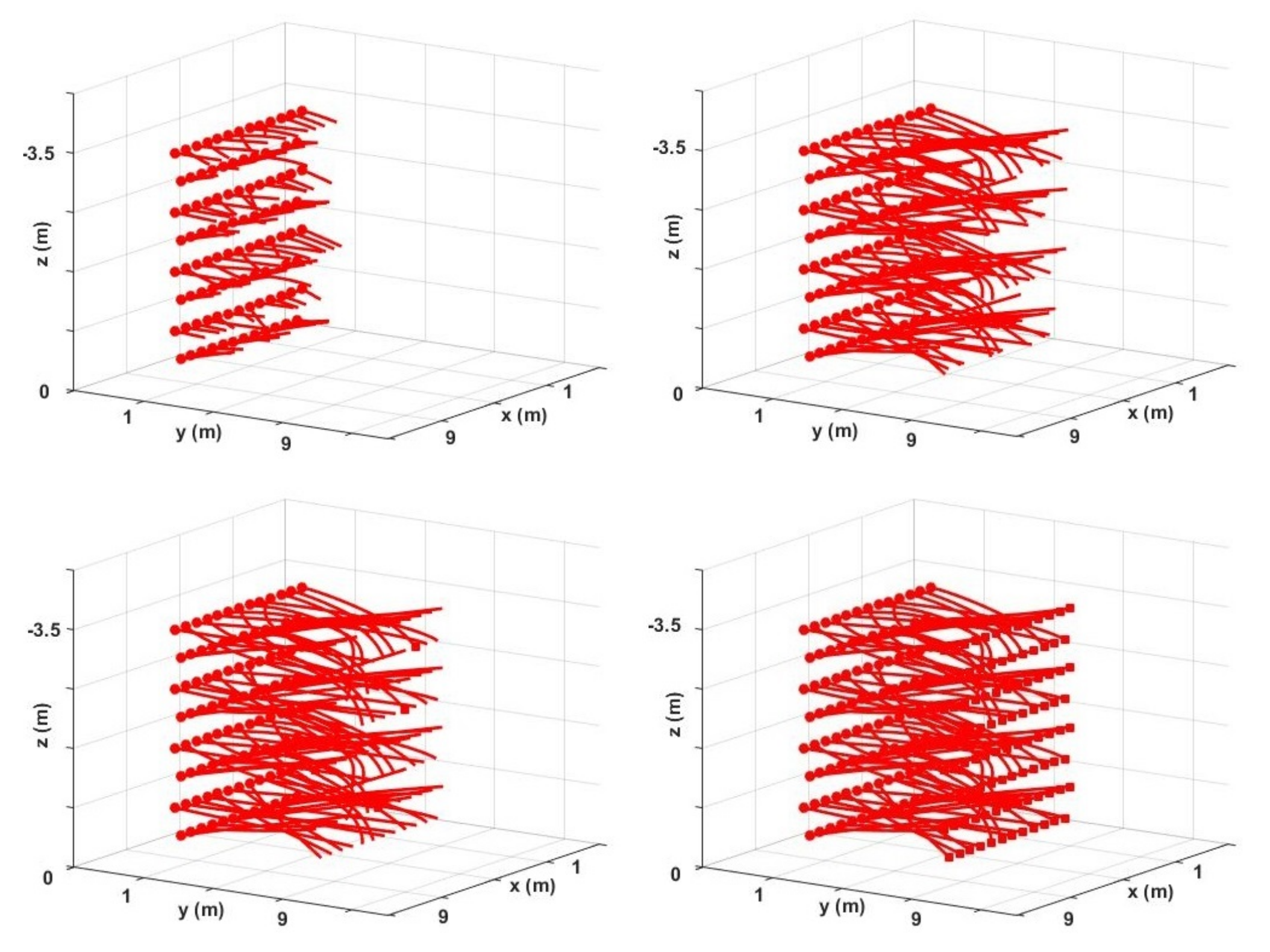
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kuwata, Y.; How, J.P. Cooperative distributed robust trajectory optimization using receding horizon MILP. IEEE Trans. Control Syst. Technol. 2010, 19, 423–431. [Google Scholar] [CrossRef]
- Augugliaro, F.; Schoellig, A.P.; D’Andrea, R. Generation of collision-free trajectories for a quadrocopter fleet: A sequential convex programming approach. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1917–1922. [Google Scholar]
- Morgan, D.; Chung, S.J.; Hadaegh, F.Y. Model predictive control of swarms of spacecraft using sequential convex programming. J. Guid. Control Dyn. 2014, 37, 1725–1740. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Cutler, M.; How, J.P. Decoupled multiagent path planning via incremental sequential convex programming. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5954–5961. [Google Scholar]
- Kuwata, Y.; Richards, A.; Schouwenaars, T.; How, J.P. Distributed robust receding horizon control for multivehicle guidance. IEEE Trans. Control Syst. Technol. 2007, 15, 627–641. [Google Scholar] [CrossRef]
- Chaloulos, G.; Hokayem, P.; Lygeros, J. Distributed hierarchical MPC for conflict resolution in air traffic control. In Proceedings of the American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 3945–3950. [Google Scholar]
- Tedesco, F.; Raimondo, D.M.; Casavola, A.; Lygeros, J. Distributed collision avoidance for interacting vehicles: A command governor approach. IFAC Proc. Vol. 2010, 43, 293–298. [Google Scholar] [CrossRef] [Green Version]
- Van Parys, R.; Pipeleers, G. Distributed model predictive formation control with inter-vehicle collision avoidance. In Proceedings of the 2017 11th Asian Control Conference (ASCC), Gold Coast, QLD, Australia, 17–20 December 2017; pp. 2399–2404. [Google Scholar]
- Van Parys, R.; Pipeleers, G. Distributed MPC for multi-vehicle systems moving in formation. Robot. Auton. Syst. 2017, 97, 144–152. [Google Scholar] [CrossRef]
- Tordesillas, J.; How, J.P. MADER: Trajectory planner in multiagent and dynamic environments. IEEE Trans. Robot. 2021, 38, 463–476. [Google Scholar] [CrossRef]
- Luis, C.E.; Schoellig, A.P. Trajectory generation for multiagent point-to-point transitions via distributed model predictive control. IEEE Robot. Autom. Lett. 2019, 4, 375–382. [Google Scholar] [CrossRef] [Green Version]
- Luis, C.E.; Vukosavljev, M.; Schoellig, A.P. Online trajectory generation with distributed model predictive control for multi-robot motion planning. IEEE Robot. Autom. Lett. 2020, 5, 604–611. [Google Scholar] [CrossRef] [Green Version]
- Van den Berg, J.; Lin, M.; Manocha, D. Reciprocal velocity obstacles for real-time multi-agent navigation. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1928–1935. [Google Scholar]
- Van Den Berg, J.; Guy, S.J.; Lin, M.; Manocha, D. Reciprocal n-body collision avoidance. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2011; pp. 3–19. [Google Scholar]
- van den Berg, J.; Guy, S.J.; Snape, J.; Lin, M.C.; Manocha, D. rvo2 Library: Reciprocal Collision Avoidance for Real-Time Multi-Agent Simulation. 2011. Available online: https://gamma.cs.unc.edu/RVO2/ (accessed on 24 January 2022).
- Alonso-Mora, J.; Breitenmoser, A.; Beardsley, P.; Siegwart, R. Reciprocal collision avoidance for multiple car-like robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 360–366. [Google Scholar]
- Snape, J.; Van Den Berg, J.; Guy, S.J.; Manocha, D. The hybrid reciprocal velocity obstacle. IEEE Trans. Robot. 2011, 27, 696–706. [Google Scholar] [CrossRef] [Green Version]
- Giese, A.; Latypov, D.; Amato, N.M. Reciprocally-rotating velocity obstacles. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3234–3241. [Google Scholar]
- Bortoff, S.A. Path planning for UAVs. In Proceedings of the 2000 American Control Conference (ACC), Chicago, IL, USA, 28–30 June 2000; pp. 364–368. [Google Scholar]
- Garrido, S.; Moreno, L.; Abderrahim, M.; Martin, F. Path planning for mobile robot navigation using voronoi diagram and fast marching. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2376–2381. [Google Scholar]
- Bhattacharya, P.; Gavrilova, M.L. Roadmap-based path planning-using the voronoi diagram for a clearance-based shortest path. IEEE Robot. Autom. Mag. 2008, 15, 58–66. [Google Scholar] [CrossRef]
- Cortes, J.; Martinez, S.; Karatas, T.; Bullo, F. Coverage control for mobile sensing networks. IEEE Trans. Robot. Autom. 2004, 20, 243–255. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Chung, S.J.; Hadaegh, F.Y. Probabilistic swarm guidance using optimal transport. In Proceedings of the 2014 IEEE Conference on Control Applications (CCA), Juan Les Antibes, France, 8–10 October 2014; pp. 498–505. [Google Scholar]
- Zhou, D.; Wang, Z.; Bandyopadhyay, S.; Schwager, M. Fast, on-line collision avoidance for dynamic vehicles using buffered voronoi cells. IEEE Robot. Autom. Lett. 2017, 2, 1047–1054. [Google Scholar] [CrossRef]
- Senbaslar, B.; Hönig, W.; Ayanian, N. Robust trajectory execution for multi-robot teams using distributed real-time replanning. In Distributed Autonomous Robotic Systems; Springer: Cham, Switzerland, 2019; pp. 167–181. [Google Scholar]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Sabetghadam, B.; Cunha, R.; Pascoal, A. Trajectory Generation for Drones in Confined Spaces using an Ellipsoid Model of the Body. IEEE Control Syst. Lett. 2021, 6, 1022–1027. [Google Scholar] [CrossRef]
- Gilbert, E.G.; Johnson, D.W.; Keerthi, S.S. A fast procedure for computing the distance between complex objects in three-dimensional space. IEEE J. Robot. Autom. 1988, 4, 193–203. [Google Scholar] [CrossRef] [Green Version]
- Van Den Bergen, G. Collision Detection in Interactive 3D Environments; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Ericson, C. Real-Time Collision Detection; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Tereshchenko, V.; Chevokin, S.; Fisunenko, A. Algorithm for finding the domain intersection of a set of polytopes. Procedia Comput. Sci. 2013, 18, 459–464. [Google Scholar] [CrossRef] [Green Version]
- Montanari, M.; Petrinic, N.; Barbieri, E. Improving the GJK algorithm for faster and more reliable distance queries between convex objects. ACM Trans. Graph. (Tog) 2017, 36, 1–7. [Google Scholar] [CrossRef]
- Farouki, R.T. The Bernstein polynomial basis: A centennial retrospective. Comput. Aided Geom. Des. 2012, 29, 379–419. [Google Scholar] [CrossRef]
- Cichella, V.; Kaminer, I.; Walton, C.; Hovakimyan, N.; Pascoal, A.M. Optimal Multivehicle Motion Planning Using Bernstein Approximants. IEEE Trans. Autom. Control 2020, 66, 1453–1467. [Google Scholar] [CrossRef]
- Sabetghadam, B.; Cunha, R.; Pascoal, A. Real-time Trajectory Generation for Multiple Drones using Bézier Curves. IFAC-PapersOnLine 2020, 53, 9276–9281. [Google Scholar] [CrossRef]
- Domahidi, A.; Jerez, J. Forces Professional; Embotech AG: Zürich, Switzerland, 2014–2019; Available online: https://embotech.com/FORCES-Pro (accessed on 22 June 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Drones | BVC | Proposed Method | ||
|---|---|---|---|---|
| Flight Time | Completed Trials | Flight Time | Completed Trials | |
| 18 | 6.812 s | 5/5 | 5.327 s | 5/5 |
| 34 | 8.105 s | 7/10 | 6.625 s | 8/10 |
| 100 | 14.573 s | 16/30 | 11.462 s | 23/30 |
| Number of Drones | Computation Time (ms) | |
|---|---|---|
| Finding the Closest Point | Solving the Sub-Problem | |
| 18 | <0.1 | 77.562 |
| 34 | <0.1 | 98.330 |
| 100 | 0.171 | 121.633 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sabetghadam, B.; Cunha, R.; Pascoal, A. A Distributed Algorithm for Real-Time Multi-Drone Collision-Free Trajectory Replanning. Sensors 2022, 22, 1855. https://doi.org/10.3390/s22051855
Sabetghadam B, Cunha R, Pascoal A. A Distributed Algorithm for Real-Time Multi-Drone Collision-Free Trajectory Replanning. Sensors. 2022; 22(5):1855. https://doi.org/10.3390/s22051855
Chicago/Turabian StyleSabetghadam, Bahareh, Rita Cunha, and António Pascoal. 2022. "A Distributed Algorithm for Real-Time Multi-Drone Collision-Free Trajectory Replanning" Sensors 22, no. 5: 1855. https://doi.org/10.3390/s22051855
APA StyleSabetghadam, B., Cunha, R., & Pascoal, A. (2022). A Distributed Algorithm for Real-Time Multi-Drone Collision-Free Trajectory Replanning. Sensors, 22(5), 1855. https://doi.org/10.3390/s22051855