
Numerical and Experimental Analysis of DVA on the Flexible-Rigid Rail Vehicle Carbody Resonant Vibration



Abstract
:1. Introduction
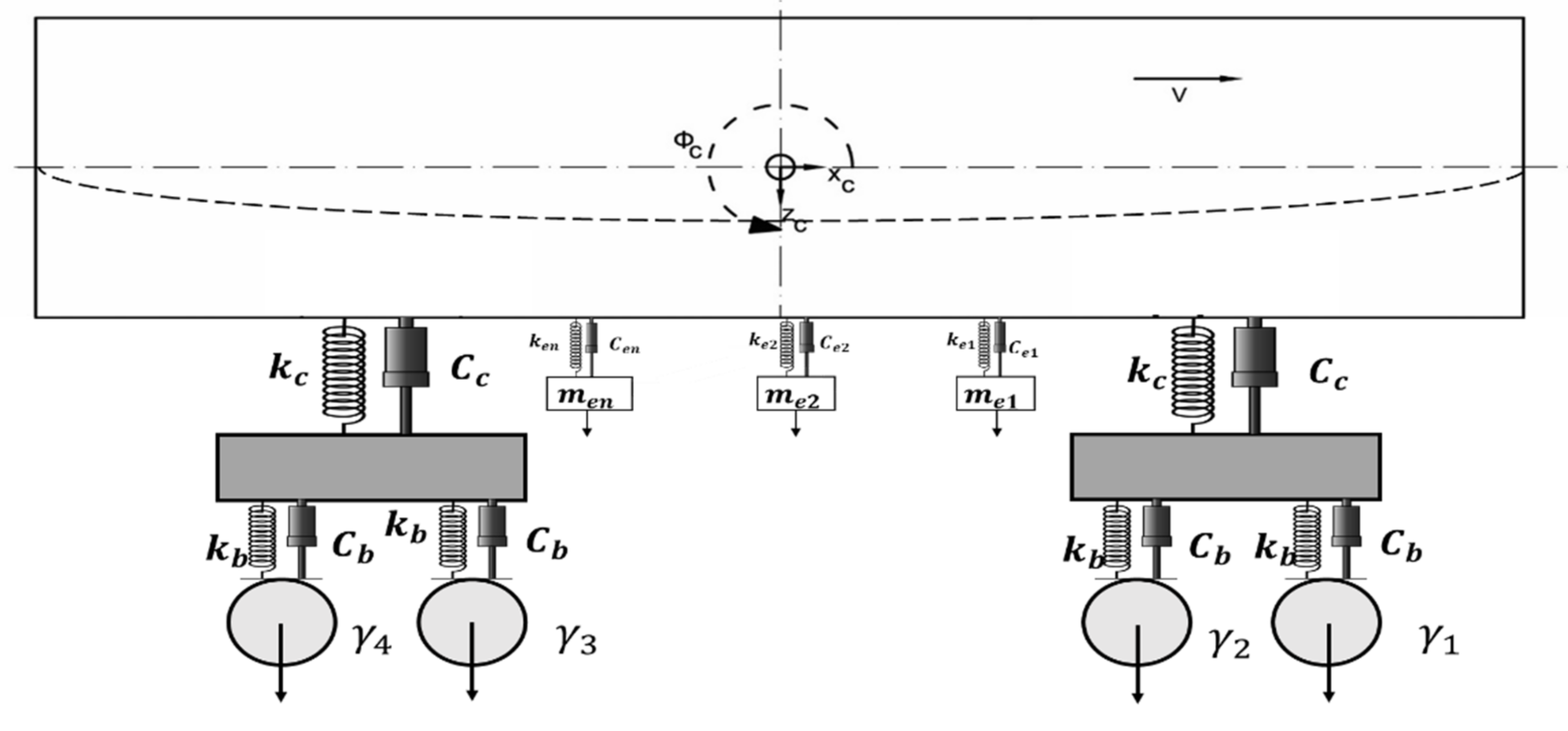
2. Mathematical Model of the Rigid-Flexible Coupled Vehicle System
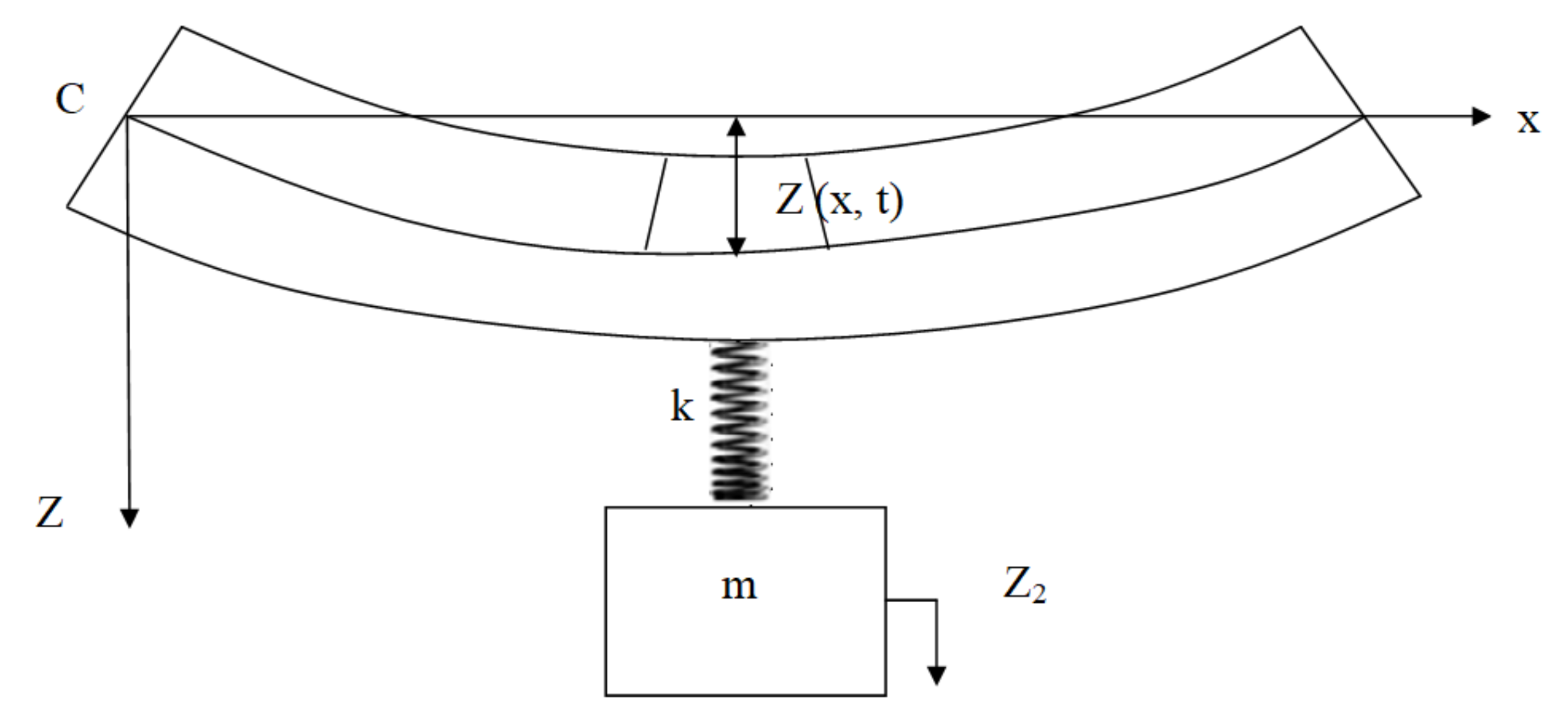
2.1. Modeling of Flexible Car Body
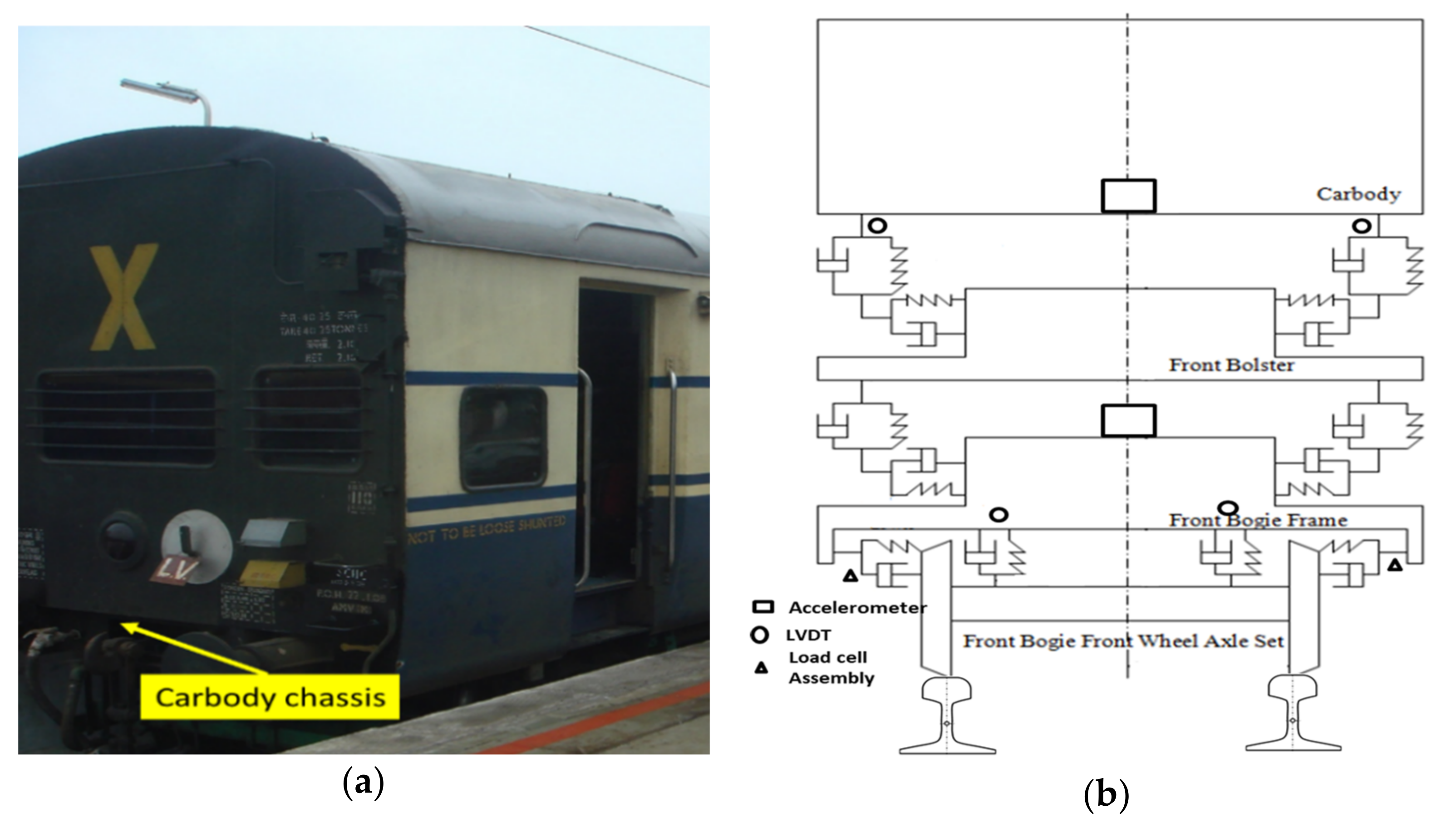
2.2. Modeling of Bogies
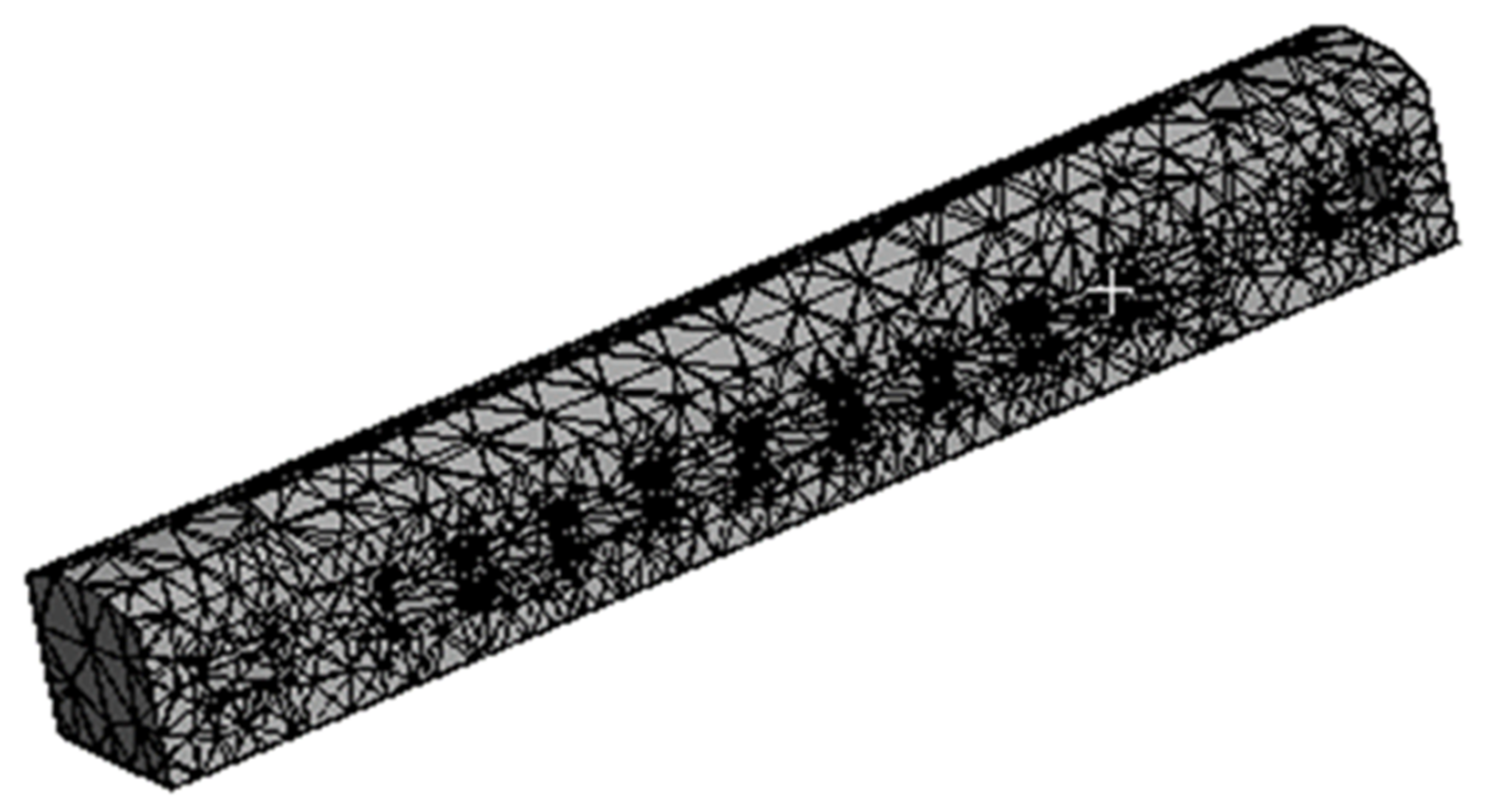
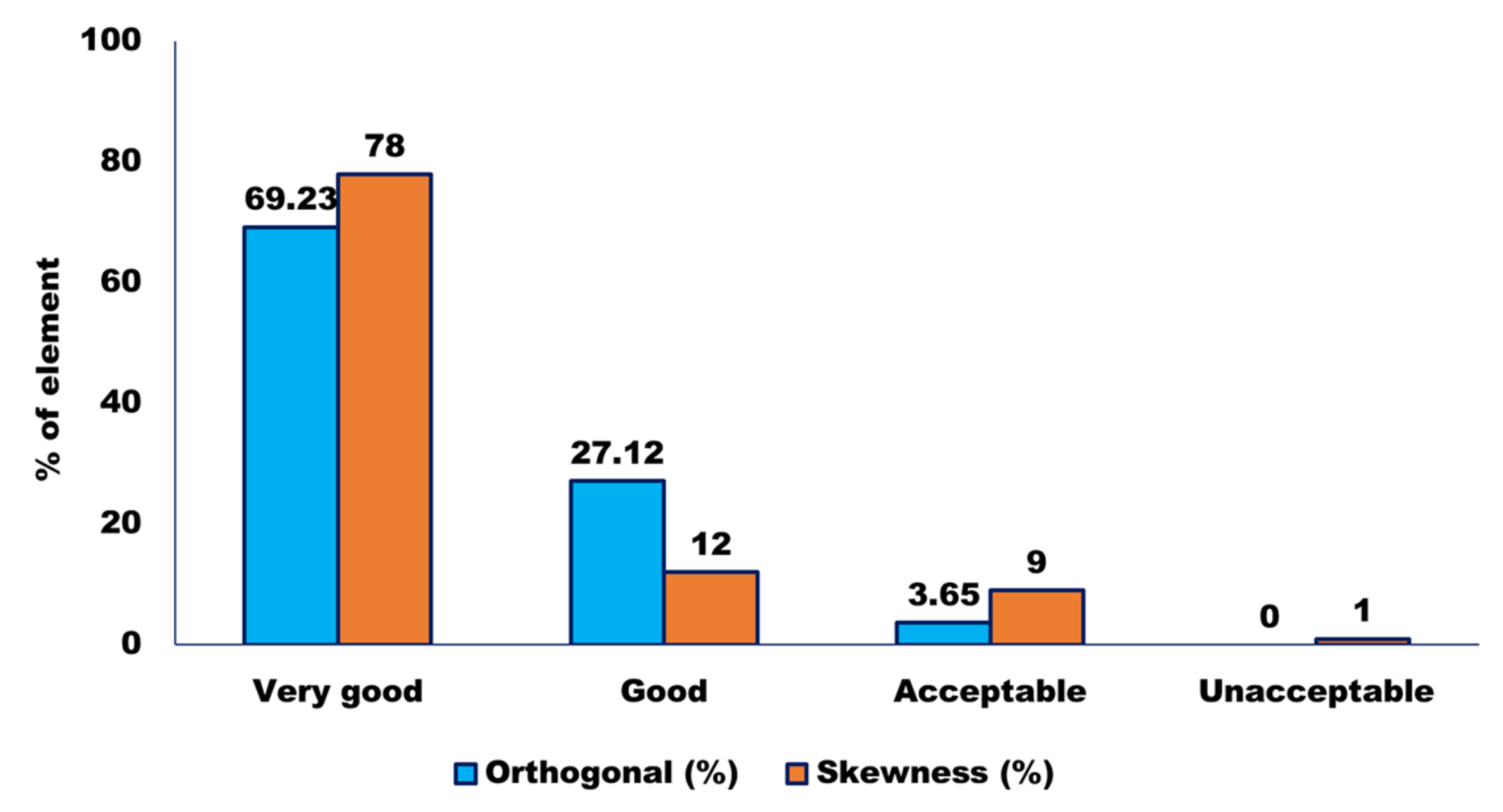
3. Finite Element Analysis of Car Body
3.1. Finite Element Model of Car Body
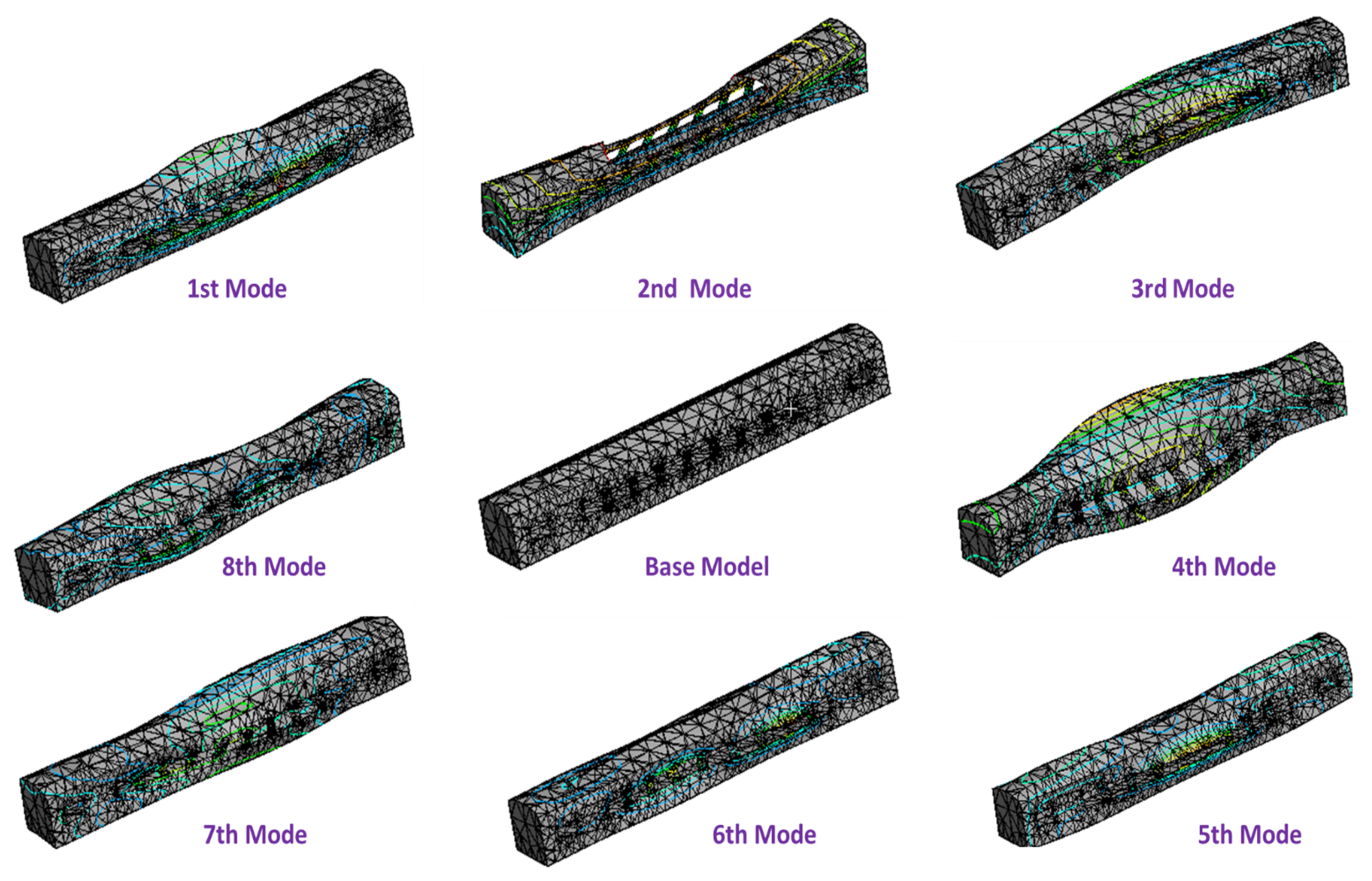
3.2. Modal Analysis of the Car Body
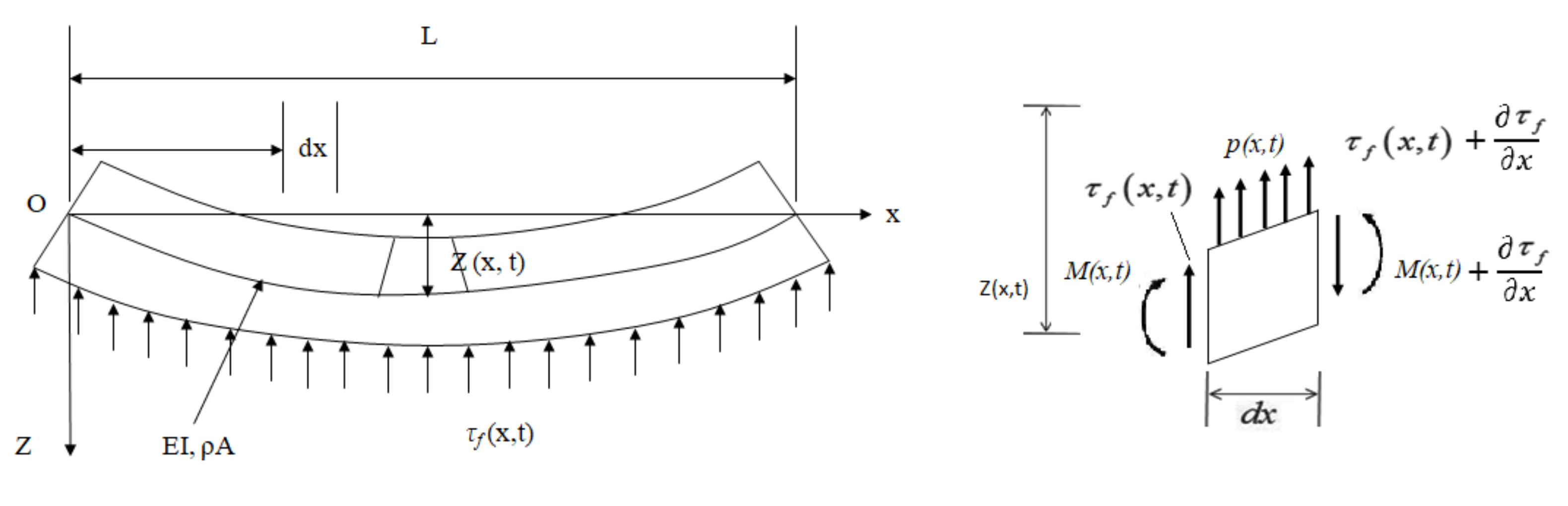
4. DVA Theory for Euler-Bernoulli Beam
4.1. Modal Analysis of a Uniform Euler-Bernoulli Beam
4.2. Optimum Suspension Frequency of DVA
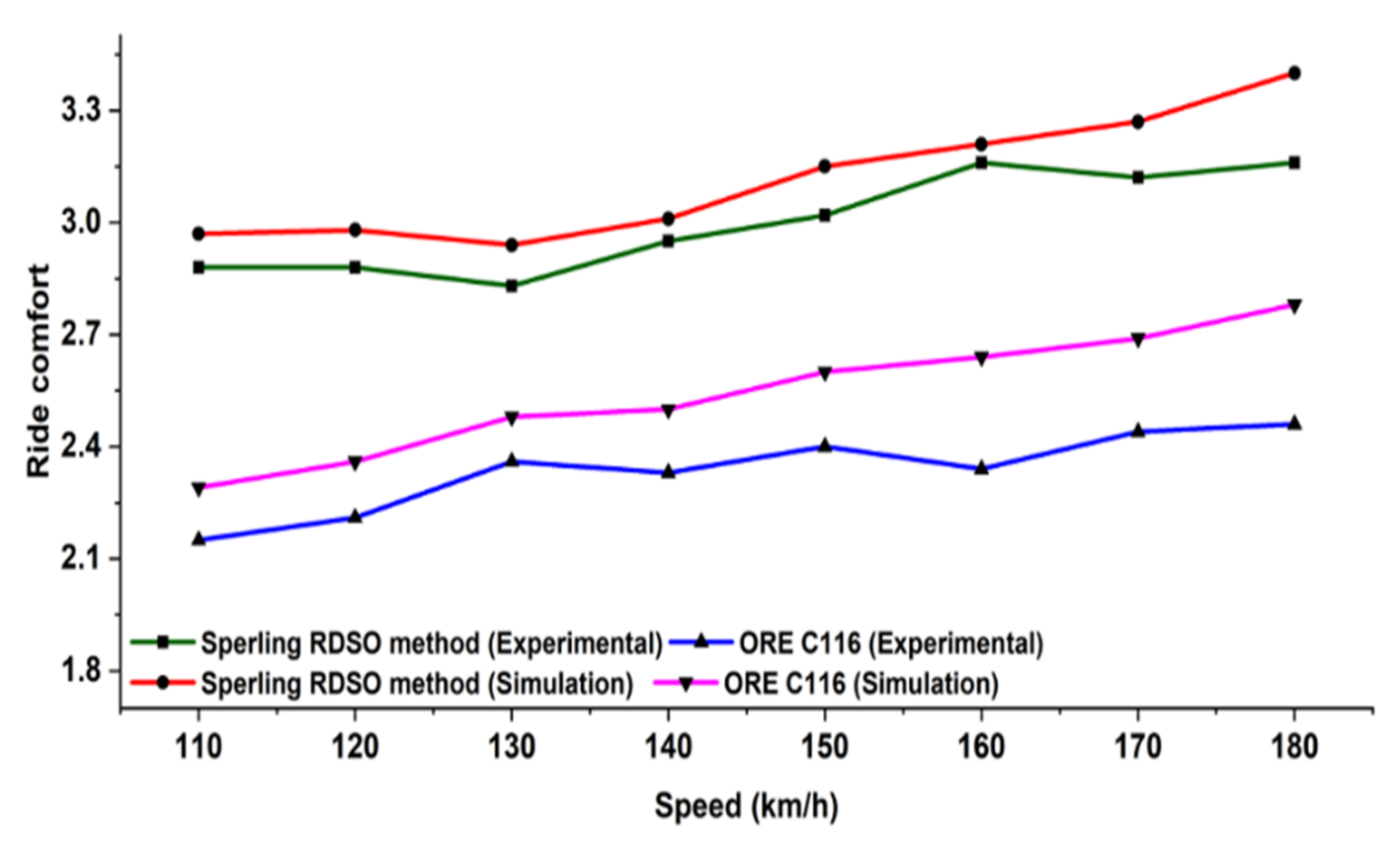
5. Validation of Numerical Modeling
6. Result and Discussion
6.1. Car Body Modes
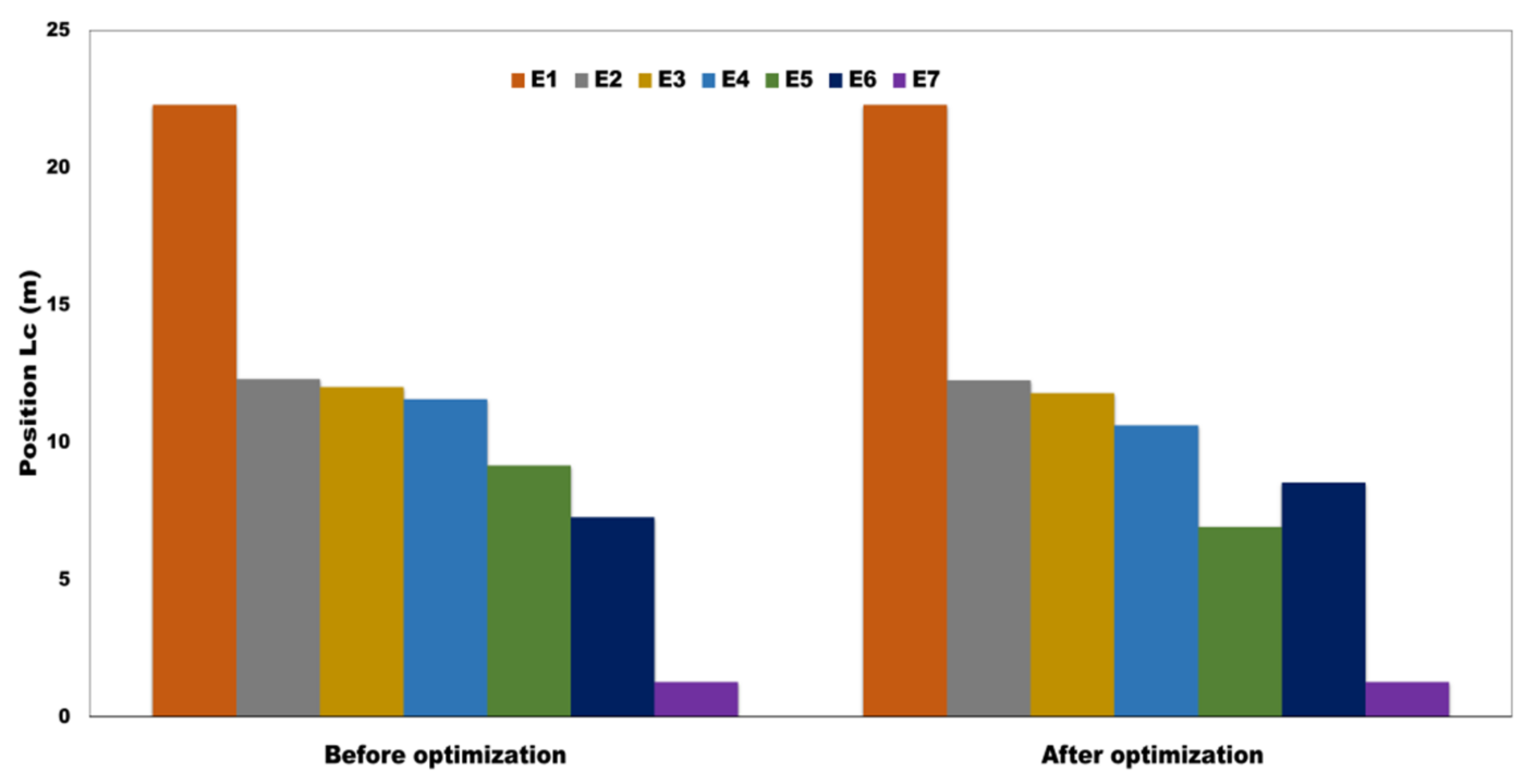
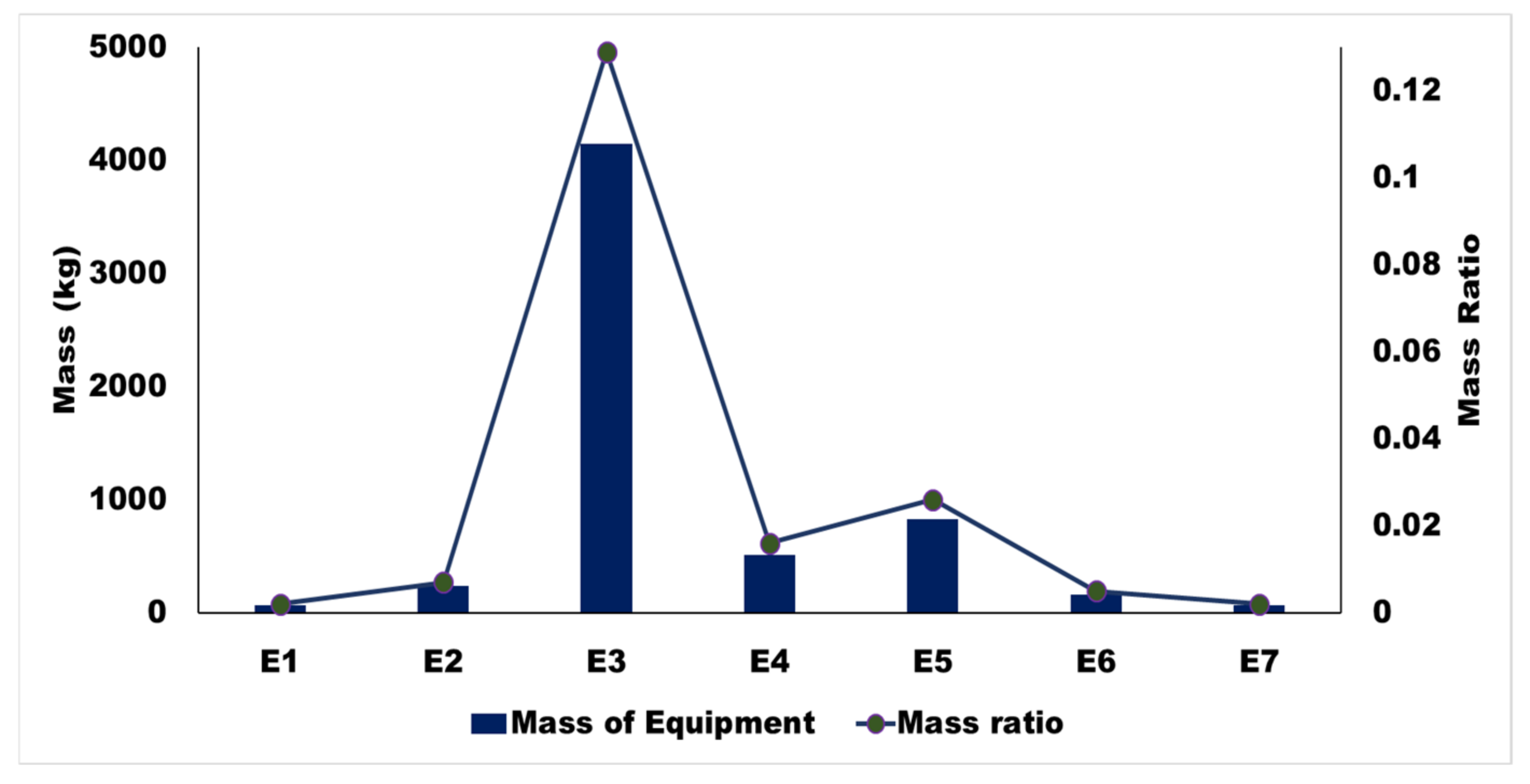
6.2. Optimum Suspension Frequency of Equipment’s
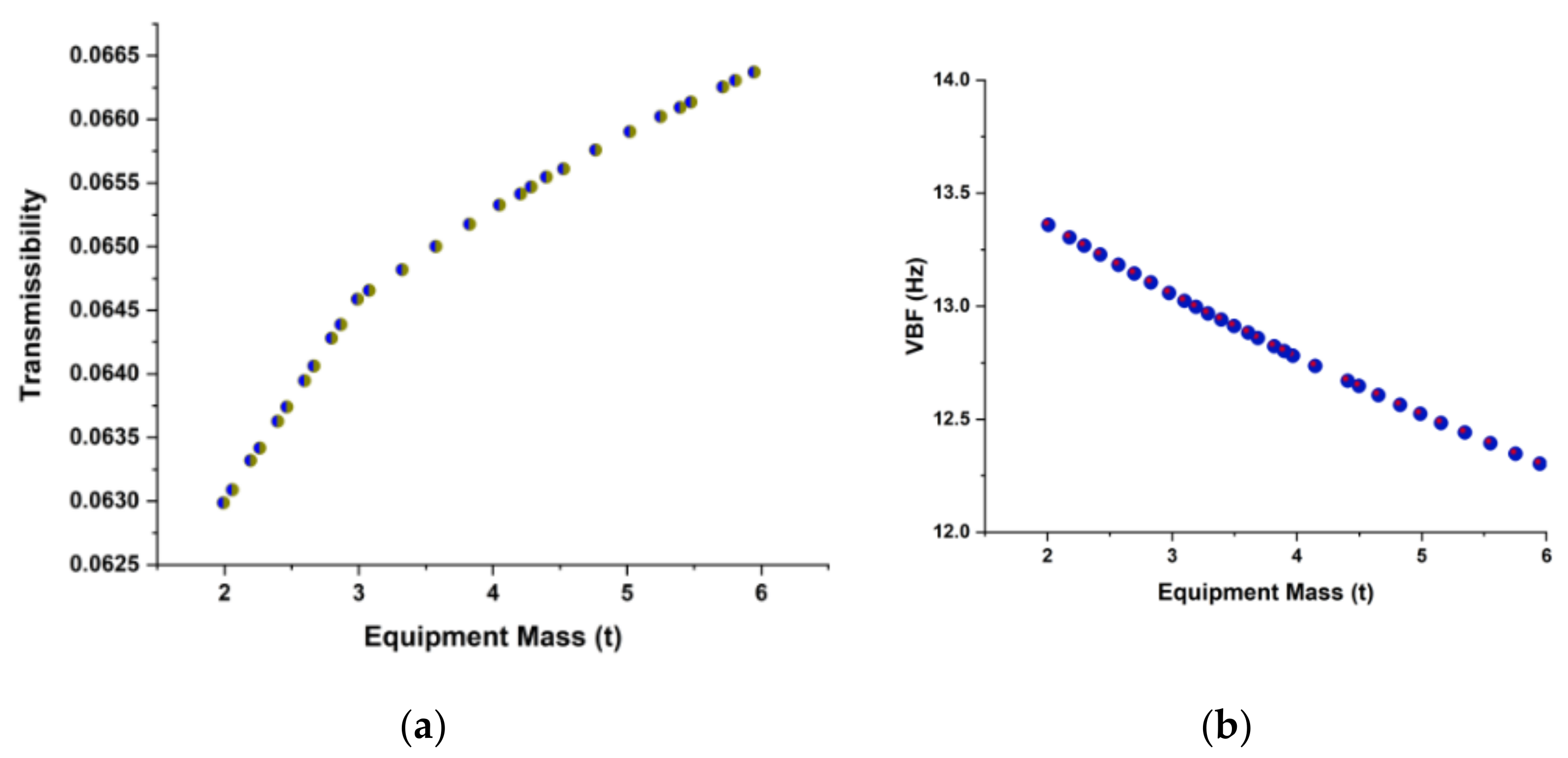
6.3. Effect of Suspension Equipment on Car Body Transmissibility and Vertical Bending Frequency
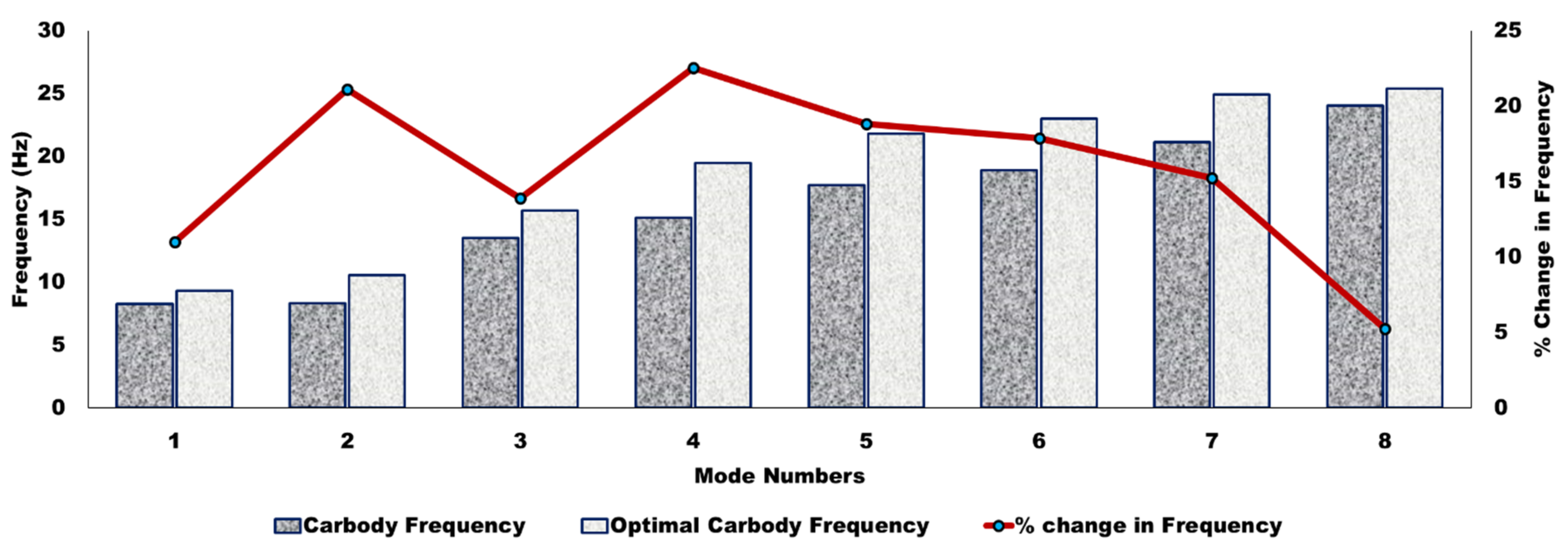
6.4. Effect on Car Body Mode Due to the Optimal Frequency of Suspended Equipment
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Smith, C.C.; Gilchrist, A.J.; Wormley, D.N. Multiple and Continuous Span Elevated Guideway-Vehicle Dynamic Performance. J. Dyn. Syst. Meas. Control 1975, 97, 30–40. [Google Scholar] [CrossRef]
- Chen, C.; Wang, K. Study on modeling of lateral semi-active suspension system of high-speed train. J. Vib. Shock 2006, 25, 151–154. [Google Scholar]
- Sharma, S.K.; Mohapatra, S.; Sharma, R.C.; Alturjman, S.; Altrjman, C.; Mostarda, L.; Stephan, T. Retrofitting Existing Buildings to Improve Energy Performance. Sustainability 2022, 14, 666. [Google Scholar] [CrossRef]
- Wu, Q.; Cole, C.; Spiryagin, M.; Chang, C.; Wei, W.; Ursulyak, L.; Shvets, A.; Murtaza, M.A.; Mirza, I.M.; Zhelieznov, K.; et al. Freight train air brake models. Int. J. Rail Transp. 2021, 1–49. [Google Scholar] [CrossRef]
- Vishwakarma, P.N.; Mishra, P.; Sharma, S.K. Characterization of a magnetorheological fluid damper a review. Mater. Today Proc. 2021, in press. [Google Scholar] [CrossRef]
- Lee, J.; Han, J.; Sharma, S.K. Structural Analysis on the Separated and Integrated Differential Gear Case for the Weight Reduction. In Advances in Engineering Design, Proceedings of the 2nd International Conference on Future Learning Aspects of Mechanical Engineering (FLAME), Noida, India, 5–7 August 2020; Lecture Notes in Mechanical Engineering; Joshi, P., Gupta, S.S., Shukla, A.K., Gautam, S.S., Eds.; Springer: Singapore, 2021; pp. 175–181. [Google Scholar]
- Sharma, R.C.; Palli, S.; Sharma, N.; Sharma, S.K. Ride Behaviour of a Four-wheel Vehicle using H Infinity Semi-Active Suspension Control under Deterministic and Random Inputs. Int. J. Veh. Struct. Syst. 2021, 13, 234–237. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C.; Lee, J. In situ and experimental analysis of longitudinal load on carbody fatigue life using nonlinear damage accumulation. Int. J. Damage Mech. 2021, 105678952110460. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C.; Lee, J. Effect of Rail Vehicle-Track Coupled Dynamics on Fatigue Failure of Coil Spring in a Suspension System. Appl. Sci. 2021, 11, 2650. [Google Scholar] [CrossRef]
- Sharma, R.C.; Sharma, S.; Sharma, N.; Sharma, S.K. Linear and Nonlinear Analysis of Ride and Stability of a Three-Wheeled Vehicle Subjected to Random and Bump Inputs Using Bond Graph and Simulink Methodology. SAE Int. J. Commer. Veh. 2022, 15, 65–79. [Google Scholar] [CrossRef]
- Gong, D.; Zhou, J.; Sun, W.; Sun, Y.; Xia, Z. Method of multi-mode vibration control for the carbody of high-speed electric multiple unit trains. J. Sound Vib. 2017, 409, 94–111. [Google Scholar] [CrossRef]
- Gong, D.; Zhou, J.; Sun, W. On the resonant vibration of a flexible railway car body and its suppression with a dynamic vibration absorber. J. Vib. Control 2013, 19, 649–657. [Google Scholar] [CrossRef]
- Shi, H.; Luo, R.; Wu, P.; Zeng, J.; Guo, J. Application of DVA theory in vibration reduction of carbody with suspended equipment for high-speed EMU. Sci. China Technol. Sci. 2014, 57, 1425–1438. [Google Scholar] [CrossRef]
- Guo, J.; Shi, H.; Luo, R.; Wu, P. Parametric Analysis of the Car Body Suspended Equipment for Railway Vehicles Vibration Reduction. IEEE Access 2019, 7, 88116–88125. [Google Scholar] [CrossRef]
- Tomioka, T.; Takigami, T.; Suzuki, Y. Numerical analysis of three-dimensional flexural vibration of railway vehicle car body. Veh. Syst. Dyn. 2006, 44, 272–285. [Google Scholar] [CrossRef]
- Sun, W.; Zhou, J.; Gong, D.; You, T. Analysis of modal frequency optimization of railway vehicle car body. Adv. Mech. Eng. 2016, 8, 1687814016643640. [Google Scholar] [CrossRef] [Green Version]
- Diana, G.; Cheli, F.; Collina, A.; Corradi, R.; Melzi, S. The Development of a Numerical Model for Railway Vehicles Comfort Assessment through Comparison with Experimental Measurements. Veh. Syst. Dyn. 2002, 38, 165–183. [Google Scholar] [CrossRef]
- Sharma, S.K.; Lee, J. Crashworthiness Analysis for Structural Stability and Dynamics. Int. J. Struct. Stab. Dyn. 2021, 21, 2150039. [Google Scholar] [CrossRef]
- Sharma, R.C.; Sharma, S.; Sharma, S.K.; Sharma, N.; Singh, G. Analysis of bio-dynamic model of seated human subject and optimization of the passenger ride comfort for three-wheel vehicle using random search technique. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2021, 235, 106–121. [Google Scholar] [CrossRef]
- Sharma, S.K.; Phan, H.; Lee, J. An Application Study on Road Surface Monitoring Using DTW Based Image Processing and Ultrasonic Sensors. Appl. Sci. 2020, 10, 4490. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C.; Sharma, N. Combined Multi-Body-System and Finite Element Analysis of a Rail Locomotive Crashworthiness. Int. J. Veh. Struct. Syst. 2020, 12, 428–435. [Google Scholar] [CrossRef]
- Lee, J.; Sharma, S.K. Numerical Investigation of Critical Speed Analysis of High-speed Rail Vehicle. Korean Soc. Precis. Eng. 2020, 2020, 696. [Google Scholar]
- Bhardawaj, S.; Sharma, R.C.; Sharma, S.K. Development in the modeling of rail vehicle system for the analysis of lateral stability. Mater. Today Proc. 2020, 25, 610–619. [Google Scholar] [CrossRef]
- Sharma, R.C.; Sharma, S.; Sharma, S.K.; Sharma, N. Analysis of generalized force and its influence on ride and stability of railway vehicle. Noise Vib. Worldw. 2020, 51, 95–109. [Google Scholar] [CrossRef]
- Sharma, S.K.; Lee, J. Finite Element Analysis of a Fishplate Rail Joint in Extreme Environment Condition. Int. J. Veh. Struct. Syst. 2020, 12, 503–506. [Google Scholar] [CrossRef]
- Sharma, R.C.; Sharma, S.K.; Palli, S. Linear and Non-Linear Stability Analysis of a Constrained Railway Wheelaxle. Int. J. Veh. Struct. Syst. 2020, 12, 128–133. [Google Scholar] [CrossRef]
- Sharma, S.; Sharma, R.C.; Sharma, S.K.; Sharma, N.; Palli, S.; Bhardawaj, S. Vibration Isolation of the Quarter Car Model of Road Vehicle System using Dynamic Vibration Absorber. Int. J. Veh. Struct. Syst. 2020, 12, 513–516. [Google Scholar] [CrossRef]
- Bhardawaj, S.; Sharma, R.C.; Sharma, S.K. Development of multibody dynamical using MR damper based semi-active bio-inspired chaotic fruit fly and fuzzy logic hybrid suspension control for rail vehicle system. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 723–744. [Google Scholar] [CrossRef]
- Palli, S.; Sharma, R.C.; Sharma, S.K.; Chintada, V.B. On methods used for setting the curve for railway tracks. J. Crit. Rev. 2020, 7, 241–246. [Google Scholar]
- Palli, S.; Sharma, R.C.; Sharma, S.K.; Muddada, V.; Sharma, N. A case study on noise pollution and its effects. J. Crit. Rev. 2020, 7, 261–267. [Google Scholar] [CrossRef]
- Sharma, S.K.; Lee, J. Design and Development of Smart Semi Active Suspension for Nonlinear Rail Vehicle Vibration Reduction. Int. J. Struct. Stab. Dyn. 2020, 20, 2050120. [Google Scholar] [CrossRef]
- Lavania, S.; Nagaria, D. Eigen spectrum based moment matching technique for model order reduction. In Proceedings of the 2015 39th National Systems Conference (NSC), Greater Noida, India, 14–16 December 2015; pp. 1–5. [Google Scholar]
- Sharma, R.C.; Sharma, S.K.; Sharma, N.; Sharma, S. Analysis of ride and stability of an ICF railway coach. Int. J. Veh. Noise Vib. 2020, 16, 127. [Google Scholar] [CrossRef]
- Bhardawaj, S.; Sharma, R.; Sharma, S. Ride Analysis of Track-Vehicle-Human Body Interaction Subjected to Random Excitation. J. Chin. Soc. Mech. Eng. 2020, 41, 229–238. [Google Scholar] [CrossRef]
- Acharya, A.; Gahlaut, U.; Sharma, K.; Sharma, S.K.; Vishwakarma, P.N.; Phanden, R.K. Crashworthiness Analysis of a Thin-Walled Structure in the Frontal Part of Automotive Chassis. Int. J. Veh. Struct. Syst. 2020, 12, 517–520. [Google Scholar] [CrossRef]
- Bhardawaj, S.; Sharma, R.C.; Sharma, S.K. Analysis of frontal car crash characteristics using ANSYS. Mater. Today Proc. 2020, 25, 898–902. [Google Scholar] [CrossRef]
- Sharma, S.K.; Kumar, A. Ride performance of a high speed rail vehicle using controlled semi active suspension system. Smart Mater. Struct. 2017, 26, 055026. [Google Scholar] [CrossRef]
- Dumitriu, M. Numerical study of the influence of suspended equipment on ride comfort in high-speed railway vehicles. Sci. Iran. 2020, 27, 1897–1915. [Google Scholar] [CrossRef] [Green Version]
- Lavania, S.; Nagaria, D. Fminsearch Optimization Based Model Order Reduction. In Proceedings of the IEEE 2016 Second International Conference on Computational Intelligence & Communication Technology (CICT), Ghaziabad, India, 12–13 February 2016; pp. 568–571. [Google Scholar]
- Sharma, S.K. Multibody analysis of longitudinal train dynamics on the passenger ride performance due to brake application. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 266–279. [Google Scholar] [CrossRef]
- Choppara, R.K.; Sharma, R.C.; Sharma, S.K.; Gupta, T. Aero dynamic cross wind analysis of locomotive. IOP Conf. Ser. Mater. Sci. Eng. 2019, 691, 12035. [Google Scholar] [CrossRef] [Green Version]
- Bhardawaj, S.; Chandmal Sharma, R.; Kumar Sharma, S. A Survey of Railway Track Modelling. Int. J. Veh. Struct. Syst. 2019, 11, 508–518. [Google Scholar] [CrossRef]
- Lavania, S.; Nagaria, D. Reduced Order Modeling of Linear Time-Invariant Systems Using Soft Computing Technique. In Advances in Intelligent Systems and Computing; Springer: Singapore, 2019; pp. 11–17. [Google Scholar]
- Goyal, S.; Anand, C.S.; Sharma, S.K.; Sharma, R.C. Crashworthiness analysis of foam filled star shape polygon of thin-walled structure. Thin-Walled Struct. 2019, 144, 106312. [Google Scholar] [CrossRef]
- Lee, J.; Ngo, V.; Phan, H.; Nguyen, T.; Dao, D.K.; Cho, Y. Scattering of Surface Waves by a Three-Dimensional Cavity of Arbitrary Shape: Analytical and Experimental Studies. Appl. Sci. 2019, 9, 5459. [Google Scholar] [CrossRef] [Green Version]
- Goswami, B.; Rathi, A.; Sayeed, S.; Das, P.; Sharma, R.C.; Sharma, S.K. Optimization Design for Aerodynamic Elements of Indian Locomotive of Passenger Train. In Advances in Engineering Design, Proceedings of the 2nd International Conference on Future Learning Aspects of Mechanical Engineering (FLAME), Noida, India, 5–7 August 2020; Lecture Notes in Mechanical Engineering; Springer: Singapore, 2019; pp. 663–673. [Google Scholar]
- Bhardawaj, S.; Sharma, R.C.; Sharma, S.K. Development and advancement in the wheel-rail rolling contact mechanics. IOP Conf. Ser. Mater. Sci. Eng. 2019, 691, 012034. [Google Scholar] [CrossRef]
- Sun, Y.; Gong, D.; Zhou, J. Study on Vibration Reduction Design of Suspended Equipment of High Speed Railway Vehicles. J. Phys. Conf. Ser. 2016, 744, 12212. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.; Zhu, S.; Ni, Y.Q.; Li, J. Vibration suppression in high-speed trains with negative stiffness dampers. Smart Struct. Syst. 2018, 21, 653–668. [Google Scholar] [CrossRef]
- Sun, Y.; Zhou, J.; Gong, D.; Sun, W.; Xia, Z. A New Vibration Absorber Design for Under-Chassis Device of a High-Speed Train. Shock Vib. 2017, 2017, 1523508. [Google Scholar] [CrossRef] [Green Version]
- Palli, S.; Koona, R.; Sharma, S.K.; Sharma, R.C. A Review on Dynamic Analysis of Rail Vehicle Coach. Int. J. Veh. Struct. Syst. 2018, 10, 204–211. [Google Scholar] [CrossRef]
- Sharma, S.K.; Kumar, A. Impact of electric locomotive traction of the passenger vehicle Ride quality in longitudinal train dynamics in the context of Indian railways. Mech. Ind. 2017, 18, 222. [Google Scholar] [CrossRef]
- Dao, D.K.; Ngo, V.; Phan, H.; Pham, C.V.; Lee, J.; Bui, T.Q. Rayleigh wave motions in an orthotropic half-space under time-harmonic loadings: A theoretical study. Appl. Math. Model. 2020, 87, 171–179. [Google Scholar] [CrossRef]
- Park, J.; Lee, J.; Min, J.; Cho, Y. Defects Inspection in Wires by Nonlinear Ultrasonic-Guided Wave Generated by Electromagnetic Sensors. Appl. Sci. 2020, 10, 4479. [Google Scholar] [CrossRef]
- Sharma, R.C.; Palli, S.; Sharma, S.K.; Roy, M. Modernization of railway track with composite sleepers. Int. J. Veh. Struct. Syst. 2017, 9, 321–329. [Google Scholar] [CrossRef]
- Sharma, R.C.; Sharma, S.K. Sensitivity analysis of three-wheel vehicle’s suspension parameters influencing ride behavior. Noise Vib. Worldw. 2018, 49, 272–280. [Google Scholar] [CrossRef]
- Sharma, S.K.; Kumar, A. Disturbance rejection and force-tracking controller of nonlinear lateral vibrations in passenger rail vehicle using magnetorheological fluid damper. J. Intell. Mater. Syst. Struct. 2018, 29, 279–297. [Google Scholar] [CrossRef]
- Sharma, S.K.; Kumar, A. Ride comfort of a higher speed rail vehicle using a magnetorheological suspension system. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2018, 232, 32–48. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.K.; Sharma, R.C. Simulation of Quarter-Car Model with Magnetorheological Dampers for Ride Quality Improvement. Int. J. Veh. Struct. Syst. 2018, 10, 169–173. [Google Scholar] [CrossRef]
- Sharma, R.C.; Sharma, S.K.; Palli, S. Rail Vehicle Modelling and Simulation using Lagrangian Method. Int. J. Veh. Struct. Syst. 2018, 10, 188–194. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C. An Investigation of a Locomotive Structural Crashworthiness Using Finite Element Simulation. SAE Int. J. Commer. Veh. 2018, 11, 235–244. [Google Scholar] [CrossRef]
- Sharma, S.K.; Kumar, A. Impact of Longitudinal Train Dynamics on Train Operations: A Simulation-Based Study. J. Vib. Eng. Technol. 2018, 6, 197–203. [Google Scholar] [CrossRef]
- Lavania, S.; Nagaria, D. BAT algorithm for model order reduction. Int. J. Math. Model. Numer. Optim. 2016, 7, 244. [Google Scholar] [CrossRef]
- Sun, Q.; Wen, Y.; Zou, Y. Study on the Vibration Suppression Method of Urban Railway Vehicles Based on a Composite Dynamic Vibration Absorber. MATEC Web Conf. 2019, 296, 01010. [Google Scholar] [CrossRef]
- Snowdon, J.C. Steady-State Behavior of the Dynamic Absorber. J. Acoust. Soc. Am. 1959, 31, 1096–1103. [Google Scholar] [CrossRef]
- Sharma, S.K.; Sharma, R.C.; Kumar, A.; Palli, S. Challenges in Rail Vehicle-Track Modeling and Simulation. Int. J. Veh. Struct. Syst. 2015, 7, 1–9. [Google Scholar] [CrossRef]
- Sharma, S.K.; Chaturvedi, S. Jerk analysis in rail vehicle dynamics. Perspect. Sci. 2016, 8, 648–650. [Google Scholar] [CrossRef]
- Sharma, S.K.; Kumar, A. Dynamics Analysis of Wheel Rail Contact Using FEA. Procedia Eng. 2016, 144, 1119–1128. [Google Scholar] [CrossRef] [Green Version]
- Fodor, K.F.; Chalivendra, V.; Kim, Y.K.; Lewis, A.F. Dynamic mechanical behavior of flocked layer composite materials. Compos. Struct. 2019, 207, 677–683. [Google Scholar] [CrossRef]
- Sankaran, K.B. Maintenance Manual for Indian Railway; Ministry of Railways, Government of India: New Delhi, India, 2001; Volume 1, pp. 1–511.
- Krawler, A. Air Brake System. 2013. Available online: https://www.sgi.sk.ca/air-brake/-/knowledge_base/air-brake/system-components (accessed on 20 January 2022).
- Tupe, A.R. Handbook on Maintenance of Air Brake System in LHB Coaches (FTIL Type); Indian Railways Center Advanced Maintenance Technology: Gwalior, India, 2013. [Google Scholar]
- Lavania, S.; Nagaria, D. Pade approximation based moment matching technique for model order reduction. In Proceedings of the 2015 International Conference on Computer, Communication and Control (IC4), Indore, India, 10–12 September 2015; pp. 1–4. [Google Scholar]
- Misra, R.K. Technical Specification of Hot Coiled Helical Springs Used in Locomotives; Ministry of Railways, Government of India: New Delhi, India, 2016.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode Number | Mode Shape Description | Frequency (Hz) | Effect |
|---|---|---|---|
| 1 | Lateral swaying of sidewalls | 8.64 | It affects the lateral direction due to the deflection of sidewalls |
| 2 | Rhombic mode or diagonal distortion | 8.79 | It affects the sidewall via displacement due to excitation frequencies |
| 3 | Vertical bending mode | 12.14 | It is an effect in the vertical vibration of the CB |
| 4 | Lateral shell breathing with rear and front walls swaying | 14.25 | It affects the end and shell of the longitudinal walls was also breathing, which caused an opposed motion |
| 5 | Lateral and rolling swaying at central length | 16.87 | It affects the rolling motion of the CB |
| 6 | Torsion and longitudinal diagonal distortion of front wall | 19.87 | Coupled lateral and longitudinal vibration together |
| 7 | Torsion and longitudinal diagonal distortion of rear wall | 20.24 | Coupled lateral and longitudinal vibration together |
| 8 | Shell breathing in longitudinal and lateral directions | 22.14 | A high rolling motion was experienced by a CB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, S.K.; Sharma, R.C.; Lee, J.; Jang, H.-L. Numerical and Experimental Analysis of DVA on the Flexible-Rigid Rail Vehicle Carbody Resonant Vibration. Sensors 2022, 22, 1922. https://doi.org/10.3390/s22051922
Sharma SK, Sharma RC, Lee J, Jang H-L. Numerical and Experimental Analysis of DVA on the Flexible-Rigid Rail Vehicle Carbody Resonant Vibration. Sensors. 2022; 22(5):1922. https://doi.org/10.3390/s22051922
Chicago/Turabian StyleSharma, Sunil Kumar, Rakesh Chandmal Sharma, Jaesun Lee, and Hong-Lae Jang. 2022. "Numerical and Experimental Analysis of DVA on the Flexible-Rigid Rail Vehicle Carbody Resonant Vibration" Sensors 22, no. 5: 1922. https://doi.org/10.3390/s22051922
APA StyleSharma, S. K., Sharma, R. C., Lee, J., & Jang, H. -L. (2022). Numerical and Experimental Analysis of DVA on the Flexible-Rigid Rail Vehicle Carbody Resonant Vibration. Sensors, 22(5), 1922. https://doi.org/10.3390/s22051922