1. Introduction
An Early Warning System (EWS) is an integrated architecture of hazard monitoring, forecasting and prediction, disaster risk assessment, communication and preparedness activities, systems, and processes that enables individuals, communities, governments, businesses, and others to take timely action to reduce disaster risks in advance of hazardous events [
1]. An EWS has the following key elements: (i) risk knowledge and risk assessment, (ii) monitoring of parameters that can enhance or enable predictions and forecasts, (iii) dissemination of timely warnings, and (iv) preparedness to respond to the disaster [
2,
3]. The United Nations Sendai framework for disaster reduction recommends to substantially increase availability and access to multi-hazard early warning systems by 2030 [
4]. In 2020, only 23 out of 195 of the UN countries had a working multi-hazard national EW system. In these countries, 93.63% of the population exposed to natural disaster-related risks was successfully protected through evacuation following the early warning [
5], showing the great effectiveness of these systems. The societal impact of a national Early Warning system in terms of risk preparedness and risk mitigation are expected to be extremely relevant. A survey in California from 2016 showed that 88% of the population agreed about the importance of a national Early Warning system for earthquakes [
6], and another study showed how such a system on the United States West Coast could reduce the risk of injuries by 50% by enhancing the population preparedness to the event [
7,
8]. From a cost–benefit standpoint, while a rigorous analysis is required for each use case and it strongly depends on the frequency of the event and the ability of the system to avoid false alarms, employing an EW system can provide great damage reduction, especially when coupled with efficient infrastructures and complementary safety measures. As such, EWSs are useful tools to protect human lives, valuable assets and the financial stability of disaster-prone regions [
9]. For example, it has been estimated that a flood forecasting system can reduce up to 35% of annual damages due to floods [
10]. The benefits from damage and fatalities reduction thanks to an earthquake warning system could easily repay 1 year of operation of said system [
7], and the estimated benefit to cost ratio of a tsunami EWS in the Indian Ocean would be 4:1 [
11]. Moreover, according to the Sendai framework, an efficient disaster risk reduction framework requires a multi-hazard approach and inclusive risk-informed decision making based on the open exchange and dissemination of disaggregated data. The use of advanced information and communication technologies could provide the means to make multi-hazard warning systems available in most countries that still do not have a national implementation, thanks to their low deployment costs, and also provide the means for smart and effective alert and information broadcasting [
12]. In particular, technologies such as Internet of Things, Cloud Computing, and Artificial Intelligence can assist the monitoring, forecasting and alarm generation aspects of Early Warning (EW) by providing the tools to sense, clean, process, and analyze data coming from the environment.
The Internet of Things (IoT) consists of infrastructures interconnecting connected objects and allowing their management, data mining and the access to the data they generate [
13]. It aims at connecting objects, actuators, or sensors to accomplish various tasks, such as environmental monitoring for various customized purposes [
14]. A basic and generic IoT architecture includes three levels: (i) the local environment, containing smart objects or sensors that communicate with each other and interact or sense data from the environment; (ii) a transport layer that allows end-nodes from the first layer to communicate with higher layers and infrastructures; and (iii) a storage, data mining, and processing layer, usually implemented in the cloud, and possibly with systems and interfaces to let users access and visualize the data. While Wireless Sensor Networks (WSN) are an essential component in many IoT deployments (providing an interface between the local environment and the users), IoT solutions allow the coexistence of heterogeneous devices, real time applications, data analytic and data storage services, improved security [
15], and energy management [
16], from which WSNs can benefit. In the context of disaster management and Early Warning systems, the IoT provides the means for widespread environmental monitoring from different data sources, low latency communications and real-time data processing, which enable the generation of accurate and timely warnings in the case of disaster occurrence or forecasting.
This work presents a review on the architectures and the requirements of IoT solutions used in EW systems. In particular, the paper will first introduce a general IoT architecture and some general concepts and requirements for IoT-based EWSs, and then focus on four different natural disasters: floods, earthquakes, tsunamis, and landslides. For each of them the review will present a set of use cases that focus on or optimize some IoT-related aspects (such as radio coverage, energy consumption, fault tolerance, latency, and real-time data processing) required for the optimal operation of each specific EW context of use. The main contributions of the review article are the following: (i) it describes a generic architecture for an Early Warning system based on the IoT; (ii) it systematically determines which are the most used solutions in the four use cases examined and it highlights possible trends and gaps; and (iii) it provides suggestions for future research in this field and some recommendations to be able to satisfy the main requirements of such a system, based on the reviewed papers and the authors’ experience in this field.
Compared to other reviews, surveys, or papers containing literature overviews that focus on a particular type of disastrous event or a single category of hazards, such as [
17,
18,
19,
20,
21,
22,
23], this paper takes into account multiple natural disasters highlighting the differences from one case to the other, in term of IoT architectures and systems requirements such as the required latency constraints. While some reviews, such as [
20,
21], more explicitly focused on prediction algorithms, Machine Learning prediction models and Computer Vision, or post-disaster management, the main focus of this work is on the adopted IoT solutions and their possible optimizations, including system requirements, communication protocols, data processing, and sensor network topology aspects.
The paper is structured as follows. In the next section, we explain the methodology used to compile the review paper and we introduce the Research Questions (RQs) addressed by the paper. In
Section 3, a generic IoT architecture is introduced, alongside a set of requirements for an EWS.
Section 4,
Section 5,
Section 6 and
Section 7 answer the aforementioned RQs by analysing papers and up-to-date solutions for the four natural disasters that have been taken into consideration. In
Section 8, we provide some recommendations about the future research on the topic of IoT solutions for Early Warning systems. Lastly, in
Section 9, we discuss the main findings of the paper.
2. Methodology
Below we briefly analyze the methods used to compile the review and the Research Questions (RQs) taken into consideration.
2.1. Method
This article reviewed papers concerning IoT solutions for EW systems focus on four different natural disasters: floods, earthquakes, tsunamis, and landslides. For each of these use cases a search process of scientific articles was conducted using four different search engines: Google Scholar, Elsevier, IEEE Xplore, and MDPI. The articles collected in each search process were preliminary filtered by year of publication in order to occupy a time frame spanning from 2017 to 2022 and review more recent papers and solutions. Older key reference papers have been cited when necessary during the discussion of generic architectures, protocols, or methods. Each search process for a chosen search engine brought a great number of results, so efficient search keywords were used. The main focus of the review is on EW systems architectures and IoT-related aspects, so articles that only proposed prediction algorithms, Machine Learning models for disaster forecasting, post-disaster recovery systems, or alert dissemination have not been included among the reviewed literature, unless they also provided the implementation or proposal of an IoT architecture for EW or dealt with some of its specific aspects. The reviewed articles contain (i) proposed or developed IoT and WSN solutions, (ii) methods and simulations regarding sensor networks optimization and performance evaluation, and (iii) considerations about network topologies or other aspects related to the constraints and requirements of an EWS. Taking these aspects into consideration, specific search keywords were selected for each search process of the four use cases examined in the reviewed. For example, keywords such as “Early Warning System”, “IoT”, “Wireless Sensor Networks”, and “Alert System” were used for the research for each use case, while for a specific use case such as Tsunami Early Warning other keywords were also used, namely, “Underwater Sensor Networks”, “IoUT”, “Ocean Monitoring”, and “Sea Waves Monitoring”. Further reduction was obtained by excluding papers that did not directly deal with IoT-related topics and by crossing the specific keywords. The process of selecting research articles ends evaluating whether the selected papers could answer one or more of the Research Questions. For example, the search process of Tsunami Early Warning in the IEEE Xplore search engine brought more than 160 results, which were then reduced to 52 after the preliminary filtering by year. Subsequently, by crossing the keywords the total papers were reduced to a handful, and lastly only three papers were selected from this search engine for the review of this use case.
2.2. Research Questions
The paper aims to answer the following Research Questions:
RQ1: What are the main constraints and strategies when developing an EWS for disaster management and forecasting, especially when it comes to IoT-related aspects?
RQ2: What are the most used IoT architectures and communication protocols in EWS for different types of disasters?
RQ3: How can existing EW systems be improved or optimized and what are the main gaps in literature and reviewed use cases?
The questions were selected with the objective to both give a general overview of architectures and networks in the field of EWSs, and provide possible insights or solutions during the development of such systems, starting from its prerequisites and constraints up to the overall architecture.
The goal of the reviewing process was to answer the RQs that were previously defined. For each article we highlighted the main objectives and the results, with the aim of showing both the progresses and the possible missing pieces or improvements that are needed in the more recent literature (RQ3). The reference architecture was used to analyze the papers and to easily extrapolate the main technologies used for each layer of the architecture developed in the various solutions (RQ2). Lastly, we provided some general recommendations to be able to satisfy the requirements of an EW system, based on the literature and the reviewed papers (RQ1).
3. IoT Architectures for EW Systems
In the following section, we introduce a simple IoT architecture that can be used to describe EW systems based on the IoT paradigm. The paper will consider this reference architecture to better describe the reviewed IoT systems in the following sections, and find possible trends. For each of the reviewed use cases, we will summarize the main features of each reviewed paper following this template, not only to highlight the key aspects of each solution, but also to show which solutions adopted Edge implementations and which did not.
3.1. Reference Architecture
IoT systems’ functions and peculiarities can be described starting from their architectural configuration. As for the most basic IoT solutions [
24], a three-layered architecture can be used to describe a generic EW system based on the IoT. As shown in
Figure 1 the common IoT architecture basically consist of a Perception layer, a Communication layer, and an Application layer [
23].
While specific architectures may introduce or specify new layers and intermediate layers, such as Edge/Fog Layers, Middleware and Interface Layers, a generic and simple architecture can be considered to be one that senses data from the environment, processes it, and/or forwards it to a central server which will then use the current and previously stored data to generate alarms through different methods, such as signal processing, statistical methods, computer vision, or Artificial Intelligence (AI), specifically through the adoption of Machine Learning (ML), and Deep Learning algorithms. Below is a brief description of each layer with its main characteristics.
3.1.1. Perception Layer
The perception layer has the task to sense and collect data from the environment, usually through sensors. Wireless Sensor Networks are widely used in disaster monitoring scenarios: they consist of nodes equipped with sensing units and communication units that can harvest data from the environment and then forward it towards a gateway node that interfaces and communicates with higher layers. WSNs offer benefits such as scalability, dynamic reconfiguration, reliability, small size, low cost, and low energy consumption [
24]. Some aspects of a WSN development are particularly important in disaster monitoring or disaster EW scenarios, such as battery life, coverage, and fault tolerance, and they will be explained in detail in
Section 3.2.
The choice of the right sensing unit can be essential in providing a timely and accurate response, and different parameters can contribute differently to a particular environmental hazard. Positioning sensors in certain zones or terrains can be particularly difficult, and while some applications monitor localized events (such as landslides), others might require deployments over large areas (such as river basins in flood EW, or the large geographical regions that can be affected by earthquakes), and this will enhance the cost of the solution and require ad hoc strategies to efficiently cover the entire area to be monitored, for example differentiating between nodes with long and short range coverage capabilities [
25] or, for example, with a smart and optimized distribution of the sensors depending on the disaster probability of occurrence [
26].
3.1.2. Communication Layer
The communication layer transmits the data acquired and processed by the perception layer to a server, cloud service or application. This layer is responsible for routing, communication between heterogeneous networks, and reliable data transmission. There are different communication technologies that can be used to transmit data, both wireless and wired.
Wireless communication technologies in IoT solutions for EW Systems can be divided in two categories: long range technologies and short range technologies. Low Power Wide Area Network (LPWAN) technologies such as Long Range Wide Area Network (LoRaWAN), SigFox, Narrowband Internet of Things (NB-IoT) and Extended Coverage GSM IoT (EC-GSM-IoT) offer long range and can be further divided into Licensed and Unlicensed, depending on the frequency bands used. LoRaWAN and SigFox use Unlicensed Industrial, Scientific and Medical (ISM) bands, while NB-IoT and Global System for Mobile communications (GSM) use cellular networks and work in licensed spectrum. Cellular networks are widely deployed and they offer reliable services and Quality of Service, but cellular networks can be badly affected by environmental disasters [
27,
28], which is a critical requirement for the development of EW Systems. Among short range technologies, wireless protocols such as Bluetooth Low Energy (BLE) and Zigbee can offer low-cost solutions with very low power consumption and mesh architectures support [
29]. Their main limit is the lack of support for long distance communication, unless the solution makes use of repeaters, which could enhance the costs [
30]. The most common wireless communication technologies for EW systems are the following:
Zigbee: Zigbee is a popular low-cost, low-energy, low-speed protocol built on existing IEEE 802.15.4 protocol and developed by ZigBee Alliance. It works on the 2.4 GHz band and it has data rates from 20 to 250 kbps. Zigbee supports star, mesh and cluster tree topologies, among which mesh connection is more flexible and reliable [
31], allowing the WSN to survive node faults and node losses. It has a light weight stack compared to Wi-Fi and Bluetooth and battery life up to 5 years, but relatively short range and low data rates.
Bluetooth and BLE: Bluetooth is based on the IEEE 802.15.1 standard. The ultra low-power, low-cost version of this standard is Bluetooth Low Energy. Both Bluetooth and BLE operate in the 2.4 GHz ISM band. They have data rates up to 1 Mbps and they use fragmentation to transmit longer data packets [
27]. In BLE, there is a trade-off between energy consumption, latency, piconet size, and throughput, but parameters tuning allows BLE to be optimized for different IoT applications [
32].
6LOWPAN: IPv6 over Low-Power Wireless Personal Area Networks (6LoWPAN) is a standard defined by the Internet Engineering Task Force to send IPv6 packets over IEEE 802.15.4 or currently also over other protocols such as Bluetooth/BLE. It is widely used for sensors that need to transmit low amounts of data, and it operates on unlicensed bands. The 6LoWPAN group defined the encapsulation and compression mechanisms that allow the IPv6 packets to be carried over the wireless network to allow sensor networks to use IP instead of other proprietary technologies.
Wi-Fi: Wi-Fi is a widely spread group of wireless technologies under the 802.11 standard. While faster than other IoT-specific standards such as Bluetooth, Wi-Fi devices consume more power than other devices, such as those based on BLE. Wi-Fi HaLow (802.11.ah) is a new Wi-Fi technology that operates in the spectrum below 1 GHz and is specifically designed for IoT use cases by adding low power consumption and long range, which are suitable for this kind of applications.
LoRaWAN: LoRa is a physical layer technology that uses a proprietary spread spectrum technique and LoRaWAN Medium Access Control protocol is an open source protocol standardized by the LoRa Alliance that runs on top of LoRa physical layer. It works in ISM bands, that is, 868 MHz in Europe, 915 MHz in North America, and 433 MHz in Asia. LoRa’s modulation allows for great performance against interference and different data rates, from 300 bps to 50 kbps. LoRaWAN improves the received messages ratio using re-transmissions, it offers great coverage (10–40 km in rural zones and 1–5km in urban zones [
33]) and low costs and long battery life for end-devices. It provides three classes of end devices for different IoT requirements, such as latency or energy consumption.
EC-GSM-IoT: EC-GSM-IoT re-purposes 200 kHz narrowband carriers from GSM networks and it only requires a software update of the GSM network, without needing additional hardware. Some solutions in the reviewed literature still use GSM and General Packet Radio Service (GPRS) modules for connectivity, but Extended Coverage GSM aims to provide better performance, including better indoor coverage, large scale deployments, reduced complexity and better power consumption compared to old GSM modules and devices [
34].
NB-IoT: NB-IoT is a technology introduced by 3rd Generation Partnership Project that operates in licensed spectrum and reuses existing Long Term Evolution infrastructures. NB-IoT provides high coverage (20 dB stronger than traditional GSM) with a high Maximum Coupling Loss of 164 dB [
34], which allows NB-IoT devices to reach underground locations (for example, for locating victims [
28]). It has low energy consumption and it improves energy saving mechanisms; network procedures, protocol stack, modulation schemes, and base-band complexity are simplified to reduce the User Equipment complexity and cost. Different kinds of latency can occur during the NB-IoT communication, and latency must be kept below 10 s in real time applications [
30].
5G: 5G networks will provide further solutions and resources when it comes to cellular/mobile communications. Particularly, Ultra Reliable and Low Latency Communication (URLLC) aims to provide delays below 1 ms and with 99% reliability, making it particularly suitable for use cases such as Earthquake Early Warning, which is strongly characterized by the latency constraint [
35].
EnOcean: EnOcean works in Unlicensed bands, 868 MHz frequency in Europe and 315 MHz frequency in America. EnOcean is not capable to handle ad hoc network topologies as other wireless communication protocols and it has less features than other protocols, but its main focus is to be energy efficient [
36], therefore being suitable for disaster management, especially thanks to its energy harvesting feature [
27].
Satellite communications: The use of satellite communications can prove effective when terrestrial communications are down or when the IoT deployment is in geographical areas that are difficult to reach with other means such as cellular communication, for example for a lack of existing infrastructures. There are some providers currently offering services that support satellite IoT, and satellites are also expected to play a relevant role in supporting 5G and IoT systems [
37].
Wired technologies can also be used in WSNs and IoT systems. For example, Industrial IoT protocols such as CANOpen have also been used in the reviewed literature to connect devices and sensors that were used in the developed EW systems. Similarly, other wired system such as optic fiber communication can still prove effective for communication, for example in underwater settings. In this context, the aforementioned radio wireless protocols are often not the right choice for communications because of the different propagation scenarios, and instead Underwater Wireless Sensor Networks (UWSN) more often use acoustic communications.
Usually, wireless communications have proved to be the most efficient in disastrous events and emergencies [
38], even though both wired and wireless communications are susceptible to failure. Disasters can have a large impact on infrastructures and networks facilities, for example cutting off the affected region in case of antennas, optical fiber links, or overhead cables failures [
27]; as such, redundant communication channels should be considered to ensure that working communication links are always available.
3.1.3. Application Layer
The application layer is at the top of the IoT layered architecture. It uses the data received from the communication layer to provide services or operations [
24], possibly combining collected data with historical data, and satellite or weather forecasting data from other sources. The application layer implements algorithms to generate and propagate warnings if a disastrous event is imminent; it can provide databases to store old data and current data in real time; it can make predictions and forecasts, and so on. User interfaces can be created on top of the application layer and, in service-oriented-architectures, service management and middleware layers can be interposed between the Application Layer and the Communication layer to act as a bridge between the devices and the applications, and to ensure interoperability [
39]. Cloud-based IoT platforms provide almost limitless storage and computational capabilities. There are many existing Cloud platforms that provide different services useful for IoT solutions [
40]. Data analytics is an essential part of IoT EW systems, that might have to deal with large amounts of data from different sources, geographic locations and points in time that need to be processed and analyzed. Data analysis can become the bottleneck of an EW system [
27], and therefore cloud platforms should be associated with modern EW systems [
19]. Cloud computing also comes with problems such as latency when the amount of data to process is too big, but Fog/Edge computing can reduce the weight on the application layer. When dealing with a great number of heterogeneous devices, sensors and data sources, like in EWSs, a semantic approach can also be used to enhance queries and data processing [
11].
Fog or, more generally, Edge computing can be implemented between the Communication layer and the Application layer to provide a faster response and better quality than solutions based solely on Cloud computing [
24]. While Cloud services provide essential storage and processing capabilities, transmitting big amounts of data from many sensors or data sources can be costly, and processing a lot of raw data in dedicated servers will add a latency that can affect the performance of the EW system. In fog and edge computing, the data from the perception layer is first processed at the network edge (on gateways or even end devices) before transmitting it to higher layers, for example to a cloud service, so that latency and the amount of data to send to the cloud can be reduced. This can also help overcome bandwidth instability [
19] (since processing data at the edge can lower the bandwidth consumption [
39]) and intermittent network conditions when environmental hazards occur or during the disaster response phase [
41]. Moreover, Edge Computing is also suitable for devices with limited battery life [
42]. Fog nodes can also implement algorithms to make predictions based on the data collected from the perception layer [
26]. It is also possible to embed ML models in Edge devices, but complexity and memory constraints could make it more challenging [
39].
3.2. Requirements of an EW System
All IoT solutions have some constraints that need to be taken into account when deploying an IoT system. Early Warning systems need to produce well-timed warnings using data usually obtained from a WSN, which also comes with its own requirements such as limited power consumption and low power communications, high or total end-to-end reliability, and limited delays. Data transmission and processing on higher layers should also be optimized as to not add latency to the system. Therefore, the following requirements can be defined when designing an IoT solution for EW systems:
Battery life: WSNs deploy sensors that need to last for a long time, especially when they are installed in locations that are hard to reach or difficult terrains that would make replacing the batteries a costly task. Energy budgets should be evaluated for each application, and data acquisitions and transmissions should be optimized to also limit power consumption in critical work conditions such as dark times operations (when solar batteries are not recharged) for sensors equipped with photo-voltaic units, or critical environmental situations that require more measurements and so on. A common energy preserving strategy is to let nodes go into sleep mode when they are not being used; however, communication protocols for WSN should be energy-efficient, minimizing overheads and re-transmissions [
43].
Fault tolerance and reliability: The system should be able to work even if one or more nodes are no longer available or if the network topology changes. Many factors can determine a faulty situation, such as low battery, bad coverage, a node being damaged or destroyed, etc. Since nodes or gateway mobility change the state of the network and complicate the message routing, numerous dedicated WSN routing protocols can be used to take into account these factors [
43]. Protocols that support mesh network topology (Zigbee, Bluetooth) are useful because they provide flexibility for the network in case of failure of one or more nodes. Self-reorganizing algorithms and failure prediction are therefore essential to allow the EW system to keep issuing warnings [
44]. Moreover, the casing or fabrication of a sensor node should be made so that bad weather conditions, floods, or hurricanes have less impact on it [
27].
Coverage: The geographical regions that need to be covered by an IoT solution for EW systems can be very large, and, as such, the chosen communication protocols must be able to allow long range communication between far nodes and gateways with predetermined rates, latency, packet loss, and other parameters. Some locations might also have blockage, heavy shadowing, or other issues that can compromise radio communications, and therefore a link budget evaluation is essential to understand whether or not communication links will work with the required parameters.
Latency: EW systems should provide timely warnings, and as such systems should be able to transmit data quickly and the elaboration should not take time. Fog/Edge computing lowers the amount of data to be sent to higher layers, reducing the latency introduced when cleaning, analysing, and processing large amounts of data in the application layer. The choice of the right processing algorithm can also be valuable to reduce latency. Depending on the application, different time constraints could be required, and different communication protocols that are suited for EW can provide short transmission times, from the order of seconds to milliseconds.
Based on the general IoT architecture defined, and on the general requirements for IoT systems, the following sections are going to present peculiarities and solutions for each of the four use cases identified as relevant for the application of EW Systems.
5. Earthquakes
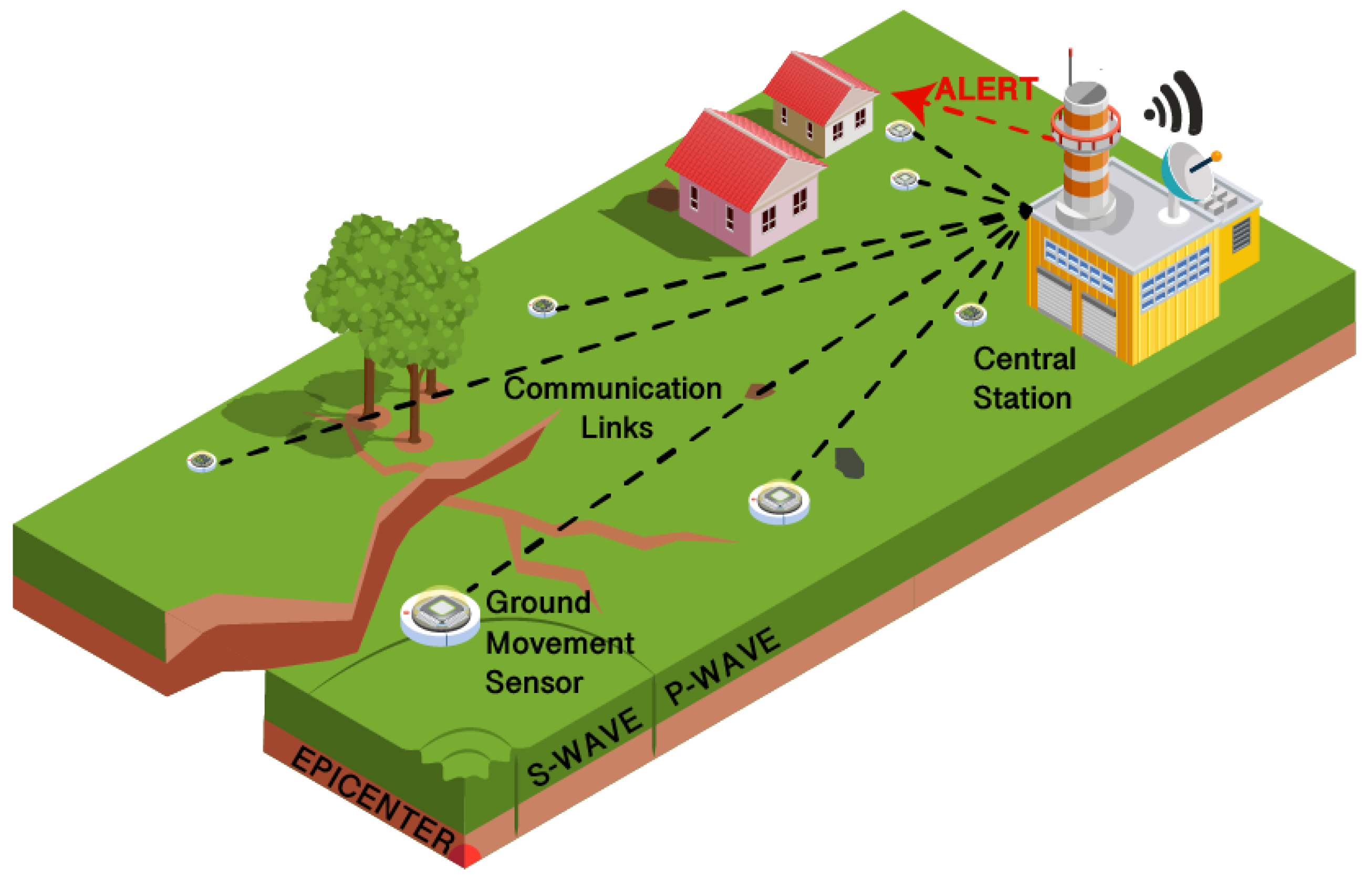
Earthquake EW systems can also benefit from the Internet of Things and related technologies. Sensors and sensing units can monitor vibrations and ground movement to create alarms and to alert people in certain places before the earthquake waves reach them. Even a few seconds or minutes of warning can prove essential in saving lives. The most common method to detect an earthquake is P-wave detection. When an earthquake occurs, compression P waves and transverse S waves radiate from the epicenter. Since P-waves travel faster but are have less destructive effects, if detected they can be used to forward warnings before the more destructive S waves reach a location.
Figure 3 illustrates a generic implementation of an earthquake Early Warning System based on P-Wave detection.
A very simple IoT system based on this method is the one proposed by Alphonsa et al. [
59], which uses accelerometers connected to micro-controllers to collect and process ground vibration measurements, and then sends the data using Zigbee to a receiver connected to a PC which is used to forward warnings to users. GSM modules can also be used to send warnings to a base transceiver station which will then alert mobile phone users.
EW systems for Earthquake monitoring are already developed in many countries, but there are still efforts to optimize sensor networks, provide reliable and low latency communications, and decrease the data processing latency, which is usually the most important factor contributing to the overall delay of an alert system for earthquakes [
60]. Once an Earthquake EW message is generated by the network or processing hub, every millisecond delay to send the message corresponds to an increase of about 8 m of the radius of the area reached by the earthquake [
35]. This means that decreasing latency is an essential requisite in earthquake EW and precise time constraints must be considered. Warning times and the collection of geophysical data should therefore be seconds to minutes. Since the most damage caused by an earthquake is usually localized within a certain perimeter around the epicenter, the most critical objective of an Earthquake EW system is to provide alarms within seconds to this area, while more accurate alerts to larger regions can then be sent in tens of seconds [
6]. With optimized data processing algorithms and data latency reduced to 1 s, it is possible to obtain possible peak performance of 3–6 s to generate and disseminate the Earthquake EW alert [
61].
5.1. Reviewed Use Cases for Earthquakes EW
Table 3 contains reviewed papers about Earthquake EW that focus on some important issues when designing an earthquake Early Warning system, such as reducing communication and algorithmic latency, synchronization, and the choice of WSN nodes density.
Tariq et al. [
53] proposed and tested a Seismic Wave Event Detection Algorithm (SWEDA) to achieve milliseconds earthquake detection and warning. It uses inclinometer nodes for Industry 4.0 and the CANOpen communication protocol for industrial IoT. They designed and produced two types of sensor node: a flat inclinometer consisting of two accelerometers, and a cilindrical one consisting of seven sensors coupled with a 24-bit sigma-delta ADC and a programmable gain amplifier to increase the resolution. Besides P-waves, this system is also able to detect S-waves, Rayleigh waves, and Love waves, but different sensors placements are required to detect different types of waves with low computational efforts (matching positions of the sensors and direction/angular displacements of the earthquake). The data processing algorithm was optimized to avoid false alarms and reduce the computational cost of floating-point operations and calibrations, the latter being essential to avoid false alarms. The solution was tested with three different systems installed in Structural Health Monitoring (SHM) sites at Qatar University. The system was able to identify an on-site induced earthquake, with a first trigger for P-waves 11 s before a second trigger for S-waves was generated, showing good early warning capabilities.
Machine Learning models can also be implemented to predict earthquakes using data from multiple sensor sources. Fauvel et al. [
62] proposed a distributed approach for Earthquake EW that uses data from GPS stations and seismometers to make predictions based on an algorithm they validated on a real-world dataset. The distributed approach is based on Edge/Fog computing and is meant to reduce the amount of data to be sent on the network by embedding a ML classifier on each sensor. The classifier produces a class output that is sent to a central server that combines the class prediction from each sensor to give a final prediction. The aggregation produced at sensor level combined with the fact that the information transmitted is unrelated to earthquake values drastically reduces the transmission effort over the network, lowering latency and making communications easier. The article showed that GPS stations and seismometers have a complementary performance (for example, for large earthquakes the accuracy is 99% for GPS, 28% for seismometers). As such, they evaluated a combined model, confirming how a multi-parametric model is the best choice in terms of accuracy.
Khedo et al. [
63] simulated an on-site WSN model to predict and detect earthquakes in the island of Mauritius, and they analyzed how different WSN parameters can corrupt or enhance estimations of velocity and location of the epicenter (obtained from P waves) to evaluate the feasibility of such a system. The article focused on synchronization issues for WSNs in earthquake monitoring: it is essential that all nodes and the base station/sink are synchronized, otherwise the clock offsets between the nodes becomes a component of the wave propagation delay, thus making warnings imprecise. The simulated architecture uses Timing-sync Protocol for Sensor Networks (TPSN) to achieve synchronization between nodes. Simulation results show that while networks using the TPSN protocol for synchronization have a worse performance compared to perfectly synchronized (ideal) systems, networks with no synchronization protocols whatsoever have a much worse results in terms of velocity and epicenter localization. The paper also proves that denser networks provide better data and are more resilient to faulty nodes, and higher sampling frequencies allow better performance.
Since the efficiency of the earthquake detection relies on the network’s density, this could translate into a very high cost for the Earthquake EW solution. Micro-ElectroMechanical System (MEMS) can provide a low cost alternative to traditional seismographs or seismometers and they can be used to build denser networks with a smaller investment. Fu et al. [
64] proposed a MEMS accelerometers network that can meet the same performance as a classic dense Earthquake EW network. Each low-cost MEMS Seismograph consists of: the MEMS accelerometer module, TCP/IP module, Power over Ethernet module, and an optional local storage module. Synchronization is achieved using a simplified Network Time Protocol (NTP). The standalone TCP/IP module is able to handle the data communication to the server via Ethernet by itself, so that the sensing unit can be controlled by a simple MCU unit, since it does not have to handle the communication routines. A low-cost seismic sensor array with 10 sensors connected to 3G/4G modems was built for field testing. The records obtained by the low cost sensors have good consistency with the data obtained by the standard seismographs and that they can obtain clear seismic phases to trigger earthquake detection for early warnings, and even earthquakes with smaller magnitude (M 3.1 to M 3.6) were identified within a 20 km range from the sensors. Bigger earthquakes (M 4.7) can be detected at up to 200 km from the sensors.
Peng et al. [
65] tested the performance of a dense Earthquake EW network of 170 sensors that they were able to deploy in the Sichuan–Yunnan border region, China. The sensor design is better specified in [
66] and it is a low-cost, low-energy MEMS accelerometer sensor with the performance of a Class B accelerometer (for comparison, MEMS sensors are usually Class C sensors, such as the unit used in the previously reviewed solution [
64]). Each unit also provides data suitable for P-wave detection, early warning parameters computing, and a low-latency data packet transmission. For each station, a 3G/4G router was used to transmit the ground-motion data recorded by the network to a processing server. The records obtained by the sensors were compared with the ones of classic earthquake stations, showing a good consistency, even for sensors at more than 150 km from the epicenter, thus proving that this low-cost solution can be used for dense Earthquake EW system and allows drastic reduction of the investment required to cover the region of interest. The system is also able to produce ‘shake-maps’, which are also useful for post-disaster response. When the seismic network in the earthquake source region is sparse, there are large system biases when computing the shake-map. Moreover, usually more than ten minutes are needed for generating a shake map, while the deployed high density network computed shake-maps with good accuracy and almost in real time.
MEMS sensors are installed in most smartphone devices, so the information from a large number of devices can be used to create a widespread seismic network. This is called mobile crowd-sensing paradigm, or MCS. An MCS architecture is the one proposed by Zambrano et al. [
68] which consists of three layers: layer 1 collects data from the low-cost smartphones network, including the users’ position using the devices’ GPS units, and detects seismic peaks, achieving synchronization between devices with different time references using the NTP; layer 2 determines if there is an actual seismic event to notify and it ensures the global reliability of the system; layer 3 is the control center, and it communicates with emergency management centres. The high heterogeneity of the sensor network also requires standardization of the sensor data and its collection, which is achieved at the second layer by the Sensor Web Enablement framework and specifically by its Sensor Observation Service component. The architecture also takes into account battery saving and memory consumption for the user device, reaching good battery performances thanks to the use of the lightweight MQTT protocol. The seismic detection was also validated using real data, showing that the solution anticipates the seismic peak by 12 s.
The MyShake Platform is an operational framework that can provide Earthquake EW system using smartphones developed by Allen et al. [
69] and that has been working as a phone application since 2016. Alerts can be generated by either detecting p-waves using the sensors embedded in the user’s smartphones or mining data from regional seismic networks (for example, it currently receives data from the ShakeAlert system in the US). While the smartphones approach makes the deployment of the network very easy, characterizing the parameters of the earthquake (location, magnitude, and origin time) is dependent on the number and geographic distribution of phones with the MyShake app around the event. An ANN embedded in the smartphone app is used to distinguish between earthquake-like ground motions and everyday motions. When an earthquake event is triggered on the phones, the MyShake server looks for space–time clusters of triggers to confirm that an earthquake is underway. While the app can provide earthquake detection, location, magnitude estimation, and shake maps, current effort is on improving its early warning capabilities. A simulation platform was created to test the early warning capabilities of the system. The simulation showed that an issue can be alerted 15.6 s before a densely populated area is reached by the earthquake, but there are 2.8 s of delay to forward the alert from the MyShake server to the cellphones, and it is not clear how this delay would scale with a large number of devices in a real scenario. The predicted magnitude was lower than the observed one. The new version of the app MyShake2.0 will issue and receive earthquake early warning alerts and improve the overall characteristics of the app.
Klapez et al. [
67] began the development of a low-cost, low-power and cloud-based earthquake alert system called Earthcloud which uses geophones instead of MEMS accelerometers, claiming they offer less noise at lower sampling frequency. When variations in ground motion are detected, sensors send data to a server and also produce a first alarm if the motion is strong enough. Specifically, the data is encapsulated into an MQTT packet and forwarded to the Amazon Web Services (AWS) IoT Core which processes and then sends them to Amazon Kinesis. Amazon Kinesis is used for pre-processing but also to forward data in real-time to both connected devices (which would receive a second confirmation alarm or a first alarm if the sensors initially did not trigger any alarm by themselves) and Amazon S3, a data storage service. The developed solution was tested using a three-unit network in the city of Modena, Italy, and only one out of the three sensors failed to detect an earthquake event, while the others were successful.
D’Errico et al. [
35] propose the architecture of an EW system that uses the 5G network to achieve low latency in transmitting data from a Structural Health Monitoring WSN to a server for data processing. By providing certain services with dedicated resources (“network slicing”), the 5G New Radio is able to support URLLC services that allow devices to send data with delays below 1 ms and with high reliability. Software Defined Networking, Network Function Virtualization and Mobile Edge Computing further enhance performance by being able to allocate resources dynamically to each service and deploy computational resources nearer to the end users.
Hung et al. [
70] also developed an Earthquake EW system based on SHM, but with a focus on energy efficiency, which remains a key constraint in Earthquake EW, too. A sentry node was integrated into the gateway unit of a WSN that used the IEEE 802.15.4 standard. The sentry node is composed of a P-wave detector, a Wake-on Radio (WoR) transmitter, and a data sink radio. The WoR devices mounted on each node monitor the channel for wake-up signals, which are used to reduce the energy consumption in Rendezvous phases, i.e., when a receiver must wake-up when a transmitting node on a higher layer initiates a communication. The use of WoR devices allows the main processor of each node to go completely into sleep when no transmission is required. The proposed architecture consists of: (i) a sensor gateway based on 3G/Wi-Fi access point, (ii) a p-wave detector connected to the gateway, and (iii) wireless sensor nodes with WoR-Receivers organized hierarchically. The P-wave detector triggers the more reliable and accurate WSN system through the WoR devices when a P-wave is detected. The study shows a 229 ms delay to the wake-up command, but the proposed scheme has a shorter wake-up delay and is more energy efficient (with power consumption 350 μA) than IEEE 802.15.4 (which has power consumption in beacon mode from 1.43 mA to 2.51 mA, depending on parameters set).
5.2. IoT Architectures for Earthquake EW Systems
Table 4 summarizes the technologies used on each layer of the reference architecture for the Earthquake EW use cases reviewed.
Most of the reviewed systems monitor ground motion to detect earthquakes, and as such accelerometers are the most widely used sensors. Other methods like using GPS displacement data can be also useful for real-time monitoring and early warning [
6]. Structural Health Monitoring systems that use MEMS sensors to measure building motion can also be used as data sources for the evaluation of ground motion and its effects on buildings at an affordable price [
71,
72]. MEMS sensors are widely spread and cheap solutions and, while the quality of data they provide is less accurate than dedicated seismic devices, they can be used to collect large amounts of data from different sources and they allow to make predictions with the right data processing and conditioning. Since denser networks proved to be more effective in predicting earthquakes, using MEMS sensors can be a valuable asset to be able to install more sensors while keeping low costs.
The reviewed solutions use both short range protocols such as Wi-Fi and long range cellular protocols, while some solutions also use wired local area communication solutions (Ethernet), even though wireless communications have proven to be the most effective in case of emergencies [
38]. With the advent of 5G, communications could be further improved, and URLLC services satisfy two of the main requirements of Earthquake EW, latency and data reliability. Earthquakes can be particularly damaging to network infrastructures, cutting off entire areas from communication networks and making it difficult to send data from wireless sensor networks, that could also be damaged by the earthquake itself. Moreover, network traffic usually rises after an earthquake, requiring operators to employ schemes to handle congestion and high traffic. Satellite communication provides wide coverage and it is not affected by ground disasters, so they can guarantee good communications in cases of paralysis of primary communication networks [
28].
When it comes to detection algorithms and data processing, P-Wave detection is usually the easiest method to be implemented. Moreover, it allows to run earthquake detection algorithms on memory constrained devices to create on-site warning systems and to implement faster Edge solutions. Fast algorithms should be used to avoid adding data processing latency to the system.
On-site methods are useful for detection of earthquakes near a seismogenic zone [
66]. In particular, STA/LTA algorithms are especially suited for real-time monitoring and early warning, especially when the devices have limited memory or processing power [
73]. Other methods such as Machine Learning can also be effectively used. Compared to the other use cases reviewed in this article, the papers for Earthquake EW made a larger use of Edge solutions, which are essential to reduce the latency of the system to the minimum, for example allowing the nodes to detect earthquakes and send warnings without processing the ground motion data at a central server or Cloud, where the data can still be used for more accurate estimations later without reducing the overall speed of the alert. Moreover, employing an Edge Computing approach, particularly a distributed one like the system proposed in [
62], could be useful to avoid issues deriving from network outages during large earthquakes by distributing the earthquake detection capabilities over various devices disseminated on the territory.
5.3. Systems Requirements and Constraints for Earthquake EW Systems
Because of the moderate seismicity across Europe, the main focus and requirement for European Earthquake EW has been on speed rather than source characterization, though research on this aspect is increasing [
6]. Meantime, low latency (in terms of both data processing, chosen prediction algorithms, and data transmission) should always be a focus as to provide warnings before the main earthquake event occurs. In particular, data latency is often the most important factor contributing to the delay of an Earthquake EW system [
60], and as such the packetization format, data serialization and compression methods, the structure of the seismic network and datalogger, etc., should be optimized.
An Earthquake EW system generally has limitations in terms of accuracy of prediction and detection, which may lead to both false alarms and missed warnings. An alerting threshold lower than the damaging threshold (or multiple thresholds) will produce more false alarms, but it will minimize the missed alerts and possible damage to the user [
74].
Other aspects that came to light from the reviewed papers were: (i) the essential role played by synchronization and the subsequent need for synchronization protocols in the deployed WSNs; (ii) the need for fault tolerant sensor networks; (iii) the correlation between node density and performance, both for quality of prediction and resilience, since WSNs show less data corruption after some nodes fail [
63]. Many efforts in the reviewed literature were focused on the design of low-cost sensor networks that could allow a denser deployment of seismic networks in this regard. Density also plays a factor in the overall latency of the system [
60]. Redundancy for both devices and communication channels should be considered while retaining low costs [
67], and improved battery life should also be an objective. Since latency is a very essential requirement, Fog/Edge computing can be exploited to reduce data transmissions and computational times at the main server, for example embedding Machine Learning models or prediction algorithms in sensing devices or gateways to make a first prediction on a lower layer.
6. Tsunamis
Tsunamis are large waves in a body of water generated by different events, such as earthquakes, volcanic eruptions, landslides impacting the water, or underwater explosions. Tsunami prediction involves seismic event detection and sea water levels and wind-waves measurements. Other methods can also be used in a Tsunami EW system, such as hydro-acoustic waves measurement, pressure measurements or camera based methods. In tsunamis generated by seismic events, the initial warning could be given by earthquake measurements, to locate the epicenter and make a prediction on the tsunami time of arrival, then other measurements can take place, such as hydro-acoustic waves detection [
75]: earthquakes or, more generally, movements in the sea bottom, generate hydro-acoustic waves that propagate at the speed of the sound in water (1500 m/s) and, since their propagation speed is much faster than that of the surface waves, they can be used to predict tsunamis deploying underwater acoustic sensors. Similarly, underwater pressure sensors have also been widely used to detect tsunami waves [
76].
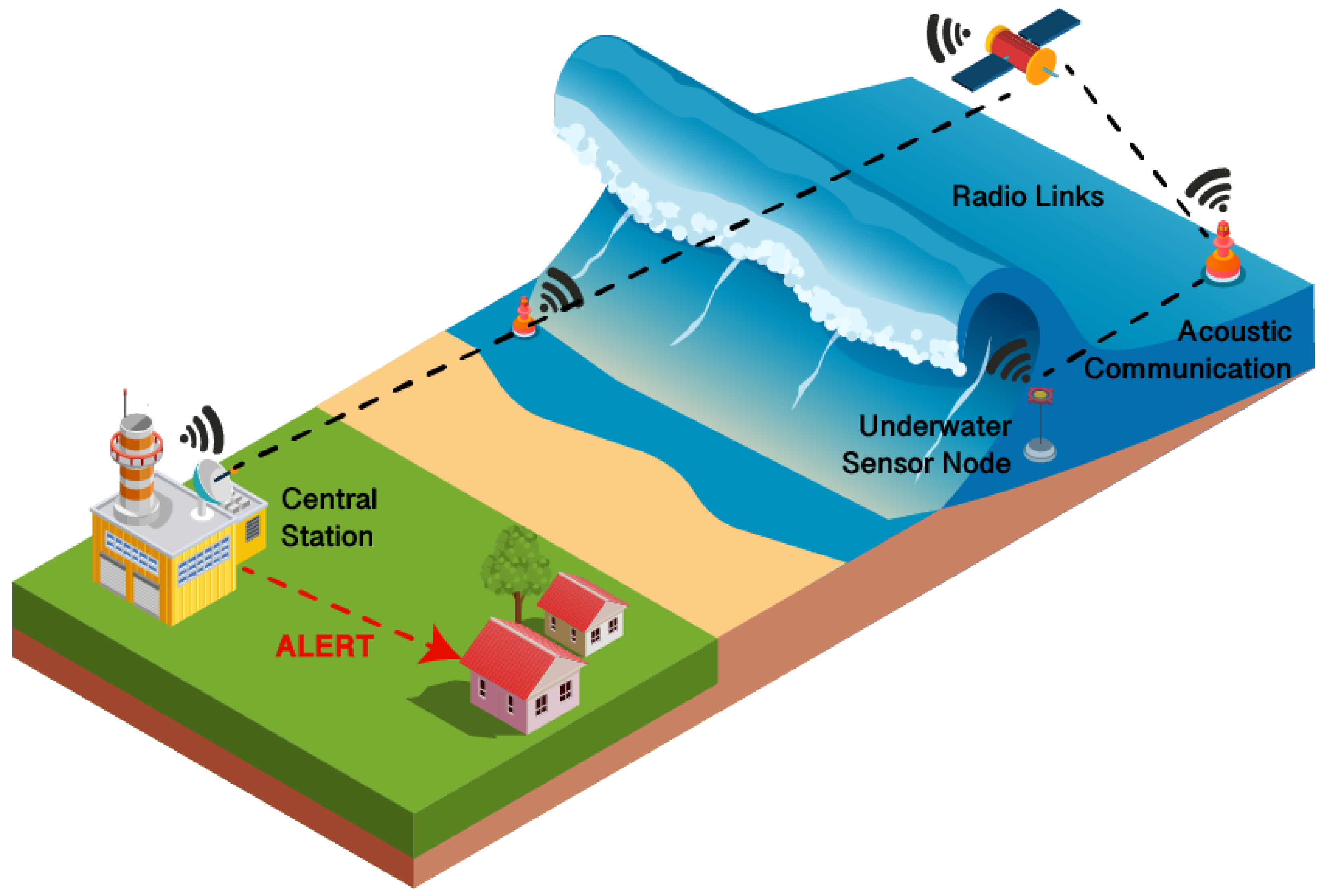
Generally, Underwater Wireless Sensor Networks can be used to collect and record data from large geographical settings and forward it to a central hub for data processing and generation of an EW. UWSNs are used for many applications, and Internet of Underwater Things (IoUT) is a paradigm that allows detection and prediction of events that could lead to disasters. A UWSN usually consists of the following components: (i) underwater static or mobile nodes equipped with sensing units and acoustic modems; and (ii) sink nodes (on autonomous surface vehicles, buoys or ships) equipped with acoustic and radio modems [
77], used to gather data from the underwater sensors and forward it to a remote server or monitoring center, usually through an IP network [
78]. The use of acoustic modems instead of radio units is usually the better choice because of the propagation conditions in an underwater environment.
Figure 4 illustrates a generic implementation of an underwater Tsunami Early Warning System based on the aforementioned basic UWSN architecture.
6.1. Reviewed Use Cases for Tsunami EW
Table 5 contains reviewed articles on Tsunami EW systems, including both proposed or tested solutions and methods to evaluate and optimize sensors deployments, especially for the more critical underwater solutions. Non-UWSN systems and designs are also reviewed.
Freitag et al. [
79] designed and tested the performance of an acoustic underwater system to develop a near-field Tsunami EW in the Mentawai Basin, between West Sumatra and Indonesia. In this application the distance between sensors (pressure sensors) is large (tens of kilometers) and the distance to shore even larger, so a lower frequency is used for communication. The system was deployed close to the bottom at different heights and with variable receiver ranges. The communication link demonstrated a high reliability with a 350 bps data rate, showing that it is feasible for a tsunami alert system. Higher data rates could be achieved but they would have a lower reliability (which could require re-transmissions of sent packets). The latency is of about 1 s, so the time needed for data to be available to the user or to be ready to be transmitted to another node (in multi-hop configurations) is the duration of the packet plus 1 s, which is a good result for early warning in this context.
The study by Meza et al. [
80] presents a method to determine an optimal array configuration of offshore tsunami sensors for near-field tsunami early warning. The methodology was tested in Northern Chile. The main issue with near-field tsunamis is that there is a short time interval between the tsunami generation and arrival, so it might be difficult to determine the tsunami source in time. Sensor cost might also be an issue so the study wants to find the minimal number of sensors for an EW system to get optimal performance. Factors that influence a prediction include: position of the sensor compared to the main wave energy beam (parallel or orthogonal to the wavefront); time of arrival of the pressure wave to the sensor (sensors closer to the event have a smaller observation time and therefore less data available for predictions); depth of the sensor (must be high enough as to ignore non-linear effects); position of the sensors relative to each other (the network granularity is chosen so that it is higher than the tsunami’s wavelength). Results showed that a three-sensor configuration can provide accurate estimations of the tsunami arrival time and peak amplitudes for the first wave.
Already existing national underwater stations or sensor networks (both wireless and wired) can be used to collect data (for example, about ocean bottom motion) and use it for predictions and to issue warnings. S-net is a dense cabled underwater observation network deployed along the Japan trench. It consists of 150 observation units, including both seismometers and bottom pressure sensors, connected by cables at 30 km intervals. All the data arrive to land in real time using optic fiber communications [
87]. Inoeu et al. [
81] developed a method for near-real time tsunami forecasts using the S-Net sensor network data, observing the wave-forms obtained from the pressure sensors. The method is able to classify the sensors of the S-Net in terms of distance from the uplift region of the earthquake by observing the registered pressure wave-forms, and, by observing which sensors are near, outside or far from said region, it is able to compute the area of the uplift region. This technique can be used to estimate both the source region of the tsunami and the earthquake magnitude. Since earthquake waves and hydro-acoustic waves are also detected by the network, filtering is required to obtain only the pressure data. The considered time-window for computing the estimation is of about 500 s after the initial earthquake, and only 1 min is required to classify the sensors, and about 10 min to compute the source area of the tsunami after the earthquake, without the need of complex simulations. The technique was successfully validated on two past large earthquakes in that region.
Jain et al. [
82] propose a framework and a prediction algorithm for Tsunami Early Warning in the Pacific Ocean that measures different kinds of parameters that are effected by tsunamis and monitors marine wildlife behaviour. Since changes in the magnetic field are generated by a tsunami wave, magnetic sensors can be used to detect said changes as precursors of tsunami waves; the wave itself exhibits particular waveform patterns that can be measured by a Tide Gauge; count sensors and motion sensors are used to monitor wildlife which is also affected by changes in magnetic fields from tsunamis. This data would be sensed by a WSN on the sea bed, then transmitted to a base station, and then processed at the main server. Predictions are computed by a Machine Learning Algorithm (logistic model trees) and the study had shown that the most relevant features for the prediction are tide levels changes and migration pattern changes.
Gardner-Stephen et al. [
83] propose a model for Tsunami EW to improve some aspects of existing warning systems, especially for what it concerns the cost of the solution (which can be prohibitive for certain countries) and the communication in compromised situations. The proposed solution includes both an EW system (based on autonomous underwater vehicles), a platform that acts as a ‘Warning Decision Support System’ and is able to work offline (when disastrous events cut off standard internet communications), and an alert distribution system. The EW system makes use of low cost vehicles (which were produced and designed by one of the authors) that are characterized by low mobility, a mostly passive operational mode with very low power consumption (1 Watt, allowing weeks of operation before recharge) and the possibility to sense tsunamis remotely using acoustic detection (hydrophones). The vehicles network can also cooperate with traditional fixed tsunami sensors and they are equipped with a GPS unit and satellite connectivity. Satellite communications are also used in the Alert Distribution and Support System for the aforementioned possibility of standard IP based connections failing during the disastrous events.
Underwater sensor networks are not the only available solution for Tsunami EW. Adi et al. [
84] designed an IoT device for wave height monitoring using an ultrasonic sensor. The device is supposed to be installed on the shore line, directly above water. When the distance between the sensor and the water raises above a certain threshold, the GSM module mounted on the IoT devices sends an SMS with a warning message before the water level becomes dangerously high. A sound indicator is also installed on the device to alert nearby people. The prototype was successfully tested but the ultrasonic sensor cannot read any water level data if put at a distance higher than 3.19 m from seawater, and as such specific data about seawater conditions are needed before installation.
Kato et al. [
85] designed a buoys satellite system for ocean monitoring and tsunami early warning. The first deployed system consisted of a buoy equipped with a Global Navigation Satellite System (GNSS) antenna able to transmit data to the coast before the wave reaches it. The received data (sea level, buoys position) allows users to visualize the motion of the sea surface at the buoys in real time. The development of this solution began in 1997, with subsequent deployments in 2001–2003, 2004–2006, and 2011. These previous solutions showed that buoys placed 20 km from the coast did not provide enough time to warn the coast and evacuate it. They also provided data to address some critical issues about buoys design, with the goal of each buoy surviving for at least 10 years. Since the required buoy distances could be of above 100 km, the Precise Point Positioning algorithm is proposed to know the position of the buoys alongside satellite communications. Field experiments showed accuracy of a few centimeters in buoys positioning. One early experiment showed data gaps, possibly due to the tilting of the buoy degrading the communication, so a mechanism to stabilize the antenna was used in subsequent ones. The paper also proposes the use of buoys to make ocean bottom motion measurements, which provides less accuracy than solutions such as S-Net but better resolution. The experiment used three transponders placed on the bottom of the ocean and communicating with the buoys with an acoustic link. Ocean crust motion measurement can be obtained by estimating the transponders position.
Darmawan et al. [
86] designed an IoT device to generate early warnings when anomalies in wave behavior are detected, using Fuzzy Logic for accurate predictions. The sensor node consists of a gyroscope, an accelerometer, and a LoRa module for data transmission. The sensor floats in the sea and senses and processes data to obtain information on wave height and wave speed. These two parameters are then used to classify the wave using the Fuzzy Logic algorithm embedded in the sensor unit. Sensed data is then sent to a server using the LoRa module. The classification algorithm provides both a danger label (safe, standby, dangerous) and a danger level (a value from 0 to 100) by computing height and speed of the waves. The Fuzzy Logic algorithm bears a 98% to 100% accuracy in testing phase. The LoRa communication was also tested, with 4.6279 s of delay and minimal error rate.
6.2. Iot Architectures for Tsunami EW Systems
Table 6 lists the main technologies used in Tsunami EW reviewed literature for each layer of the reference IoT architecture.
Detection of wave heights and anomalies on the sea surface can also be used for early detection of tsunami waves. Wave measurements can be obtained from offshore buoys, but while they are very accurate, they can also be very costly. Low-cost, low-power MEMS sensors, such as accelerometers and gyroscopes, can also be used to obtain wave characteristics such as height, period, direction and speed by deploying them on floating buoys.
The use of sensor networks in underwater environments comes with associated challenges related to the communication layer. Because of the harsher conditions and related higher costs, but also because this environment comes with propagation scenarios that make radio-frequency communications difficult to use, the acoustic channel is preferred compared to radio communication [
76,
78], with typical data rates from 31 kbps to 125 kbps [
88], or even up to 300 kbps in the solution by Freitag [
79]. Optical communications are also a solution, and they provide faster, low energy communications with lower delays, but they require a line-of-sight unlike acoustic sensors. Some existing underwater sensor networks, such as S-Net in Japan, use wired optic communications. The most used communication choice for underwater wireless solutions is certainly the acoustic channel. Reviewed papers that used UWSN did not deal with ‘onland’ communications, which is usually carried out by an IP network such as a cellular network. Only [
83] took into account the possibility of terrestrial communications failing in case of disaster, and as such considered the use of satellite communications to deal with that event. Satellite communication is also particularly suited to cover the large distances required in some solutions. Solutions such as LoRa and GSM have also been employed for tsunami warning devices.
Most TEWs based on a UWSN use a basic architecture which uses a central server connected to the sink nodes through an IP network. As such the main computing is done at said server, and there are different methods to detect the tsunami and its point of origin (inversion, Machine Learning, underwater sensors classification, etc.). Non-UWSN systems can also use simple threshold methods or other algorithms such as the Fuzzy Logic algorithm developed by [
86]. These relatively simple systems also allow to move the prediction at the edge of the network and closer to the monitored area, making alerts faster.
6.3. Systems Requirements and Constraints for Tsunami EW Systems
An underwater acoustic network needs to be both reliable and energy-efficient. Accurate energy budgets/lifetime estimations are necessary since sensors replacement is more difficult, and energy harvesting techniques (wave motion harvesting, microbial fuel cells [
89]) are suggested to enhance the life of the sensors deployed underwater [
78]. The correct positioning of the sensors can help reduce costs and increase accuracy of predictions. The positioning of the central hub and terrestrial receivers is also important, since they could be compromised by earthquakes or tsunamis [
85].
While the acoustic channel is a better solution for UWSN than the radio channel, it also comes with its own limitations: frequency dependent attenuation, multipath and high and variable delays. Specific modulation schemes are also suggested for the acoustic channel to enhance the overall communications and reduce multipath effects [
89]. Routing protocols also play an essential role in UWSNs since acoustic communications are very energy consuming and therefore they require energy optimized routing, which has often been achieved at the expense of higher delays [
78]. In IoUT, data aggregation is made more difficult by the fact that the overlap of multiple routing paths will increase packet collisions in the area and it will require re-transmissions, increasing energy consumption, and decreasing reliability [
76]. When making use of mobile sensor nodes, such as underwater vehicles or sea gliders, further challenges in terms of routing, node localization and synchronization, and energy consumption are introduced [
78].
Like for UWSN, buoys solutions for wave detection come with challenges compared to on-land deployments, since the connectivity between neighboring nodes can be affected by wave height, and as such dedicated routing protocols and processing algorithms are required [
90], and the tilting of the buoys can also degrade the communications.
8. Recommendations and Future Work
Table 9 lists some possible solutions and recommended options to satisfy the requirements that were previously defined for an IoT Early Warning System, based on the reviewed literature. It is to be noted that some of these suggestions still require careful planning before the final implementation, for example evaluating link budgets or received signal strength when using a specific communication solution, or measuring energy consumption.
While the requirements for each use case (floods, earthquakes, tsunamis, landslides) are widely different, for example in terms of latency, the table shows how Edge solutions can be used to satisfy different needs and as such should be taken into consideration during the development of an Early Warning system based on the IoT, regardless of the specific application. Edge Computing might also consist in the deployment of AI at the edge of the architecture. When using ML, learning at the Cloud might not be the best solution for wide monitored sites, geographically dispersed locations or rapidly changing environmental conditions [
95], and as such Edge AI could be integrated into the architecture, keeping in mind possible additional processing time depending on the complexity of the ML model and the resources of the Edge devices. Besides ML, simpler algorithms or threshold based methods can also be employed on-site if the devices are limited in terms of computational capabilities. In conclusion, Cloud Computing should not be completely replaced by Edge Computing, but they should work in tandem to provide a better overall system.
Moreover, we give the following recommendations for future work and research, also taking into account some of the gaps or trends that were found in the reviewed literature:
Optimization of MEMS sensors and widening of their employment. Since cost is an important factor in EW and IoT systems, they provide a valuable help in reducing costs while allowing to obtain dense sensor networks and the related benefits. MEMS sensors do not provide the same accuracy as other “standard” sensors, but they can still be used effectively in EW, and further research on sensors design and sensor signal conditioning can help improve their performance.
Moving towards new cellular solutions such as 5G or NB-IoT, since some of the reviewed papers still relied on GSM or generally older cellular technologies. The use of new cellular solutions specifically designed to support IoT device and machine to machine communication (such as EC-GSM, NB-IoT or LTE-M) could provide better coverage, battery saving, data rates and latency performances in this context.
Employment of non-terrestrial-networks and satellite communications. Satellites do not only allow to reach geographically distant locations and overcome the problem of missing terrestrial infrastructures [
37], but they can also provide an essential back-end in case of disasters affecting the terrestrial communication infrastructures.
Optimization of the prediction algorithms and data processing speed, especially for use cases such as earthquakes. Data analysis can become the bottleneck of an EW system and data latency is the main component of EEW latency [
60], and as such efforts should be focused on its reduction for the use cases that particularly value speed. Besides the signal processing algorithms, packetization and data serialization formats should also be evaluated in terms of their impact on the system speed, and these aspects alongside others such as data logging management should become part of the system design.
Employment of multi-parametric monitoring and modeling to enhance the accuracy of predictions, reduce false alarms and enhance the resilience of the system if some data collection modules experience faults. Rainwater forecasts, satellite ground motion data, satellite imagery, and terrestrial sensor networks provide data that can be used together to provide better forecasting models and thresholds optimizations. A semantic approach can help improve the performance of a system with a wide array of different data sources [
11].
9. Discussion
The review showed that an IoT solution in the context of Early Warning can be very effective in the tasks of data collection, transmission, and disaster prediction, all the while retaining cost-effectiveness. As such, Wireless Sensor Networks, Cloud solutions, Machine Learning, and other components of the Internet of Things should be used when deploying Early Warning Systems, or integrated into already existing ones. This would allow a denser presence of alert systems on the territory and would therefore provide timely warnings and essential data and instruments to the authorities, assuring economical and societal benefits by reducing risks associated with disastrous events. Moreover, many of the requirements of an IoT-based Early Warning system can be completely or partly satisfied by adopting an Edge Computing solution, possibly alongside a Cloud one. This would bring the system resources closer to the end devices of the network with the aim of reducing latency, number of transmissions, and data processing at centrals servers. The review showed some already existing trends in this regard, with examples of Edge solutions, on-site predictions and Edge AI implementations, as well as other technological trends such as the more and more frequent adoption of low-cost MEMS systems and Machine Learning prediction algorithms.
The article also showed how an accurate choice of the network topology, or the implementation of mesh and adaptive solutions can be effective in satisfying other constraints such as coverage, reliability and battery management. The selection of the right communication protocol is also essential, both for the energy consumption and the coverage aspects. Ad hoc solutions such as LoRa or other Unlicensed protocols can be effective in areas where there is not good cellular coverage, but in this case the limits due to the shared radio resource need to be taken into account. Non-terrestrial-networks are also an important alternative to consider, since they could provide a more reliable back-end than terrestrial networks, which are more prone to failure in case of natural disasters, and can generally provide better coverage in areas that do not have good cellular infrastructures.
Some gaps in the recent literature were also found, particularly the lack of fault tolerant solutions, both in terms of communications and sensing node failures, and the use of non-state-of-the-art communication protocols, since, for example, some solutions still used older cellular technologies such as GSM.
The recommendations provided aim at filling these gaps and giving a meaningful contribution to the future research on EW systems, particularly regarding topics such as very low-latency communication, real-time monitoring and control of environmental parameters, very low-cost sensors, and high density sensor networks. Moreover, another important recommendation concerns the potential benefits of widespread sensor networks, since density can provide better fault tolerance but also improve the effectiveness of predictions and event detection.
10. Conclusions
This article reviewed papers that dealt with the proposal, development, testing, and optimization of Early Warning Systems for natural disasters that are based on the Internet of Things. In particular, four different use cases were taken into consideration: floods, earthquakes, tsunamis, and landslides. For all the four scenarios a reference three-layered architecture was used to better extrapolate the IoT solutions adopted in each paper, and to highlight the objectives, final results, and possible limitations of each work. Based on the reviewed literature, it was found that the use of the Fog/Edge computing in the developed architecture allows to reduce latency, number of transmissions, and data processing. Another finding was that in new IoT-based Early Warning systems more focus should be put into the fault tolerance capabilities of the deployed solutions, in terms of sensor networks and communications resilience. Moreover, some recommendations regarding battery consumption optimization, latency, communication efficiency and reliability should be taken into account for the improvement of existing systems or for future research.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}