
A Comprehensive Study of Event Detection in WPCN Networks with Noisy Measurements

 , ,
, , 
Abstract
:1. Introduction
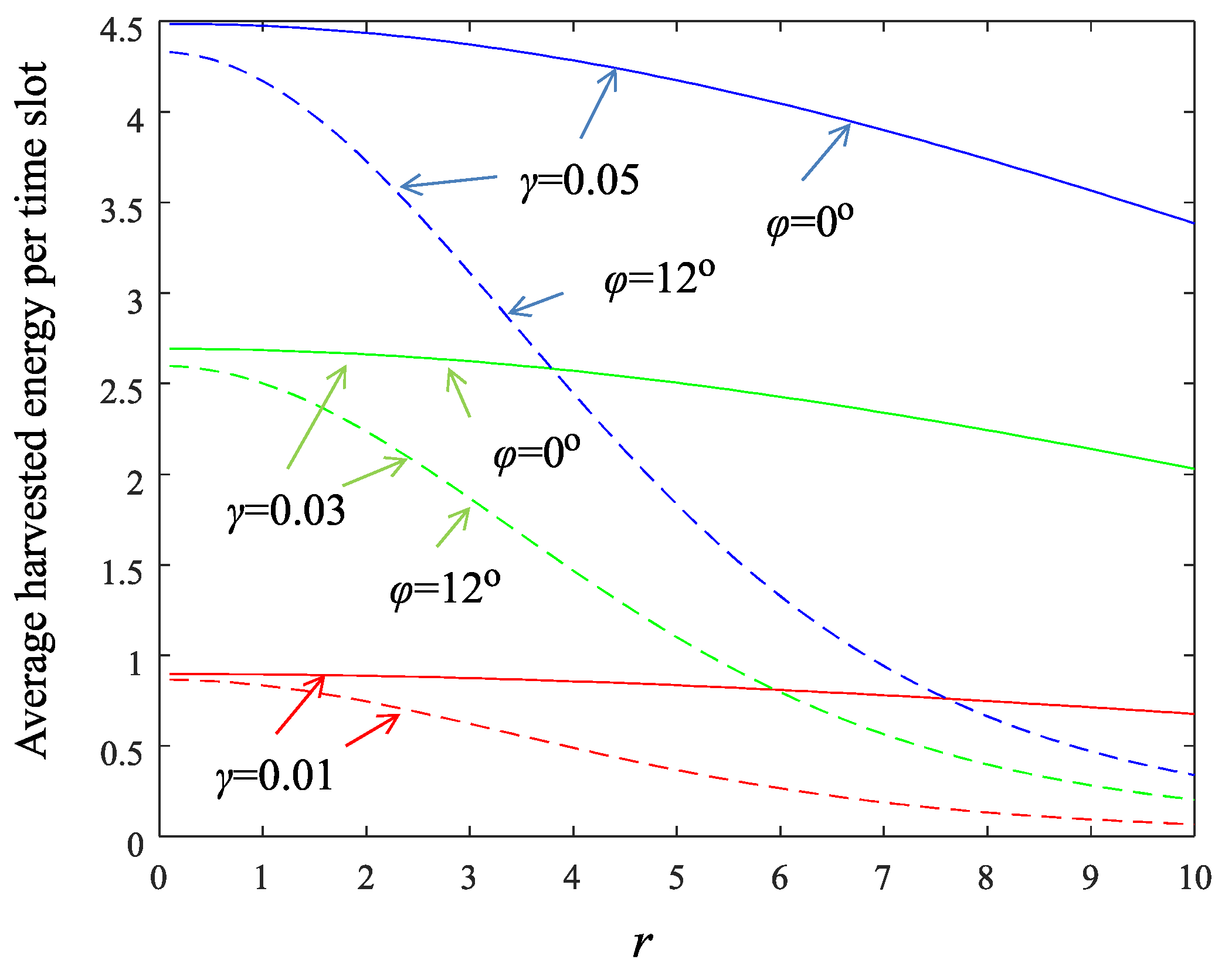
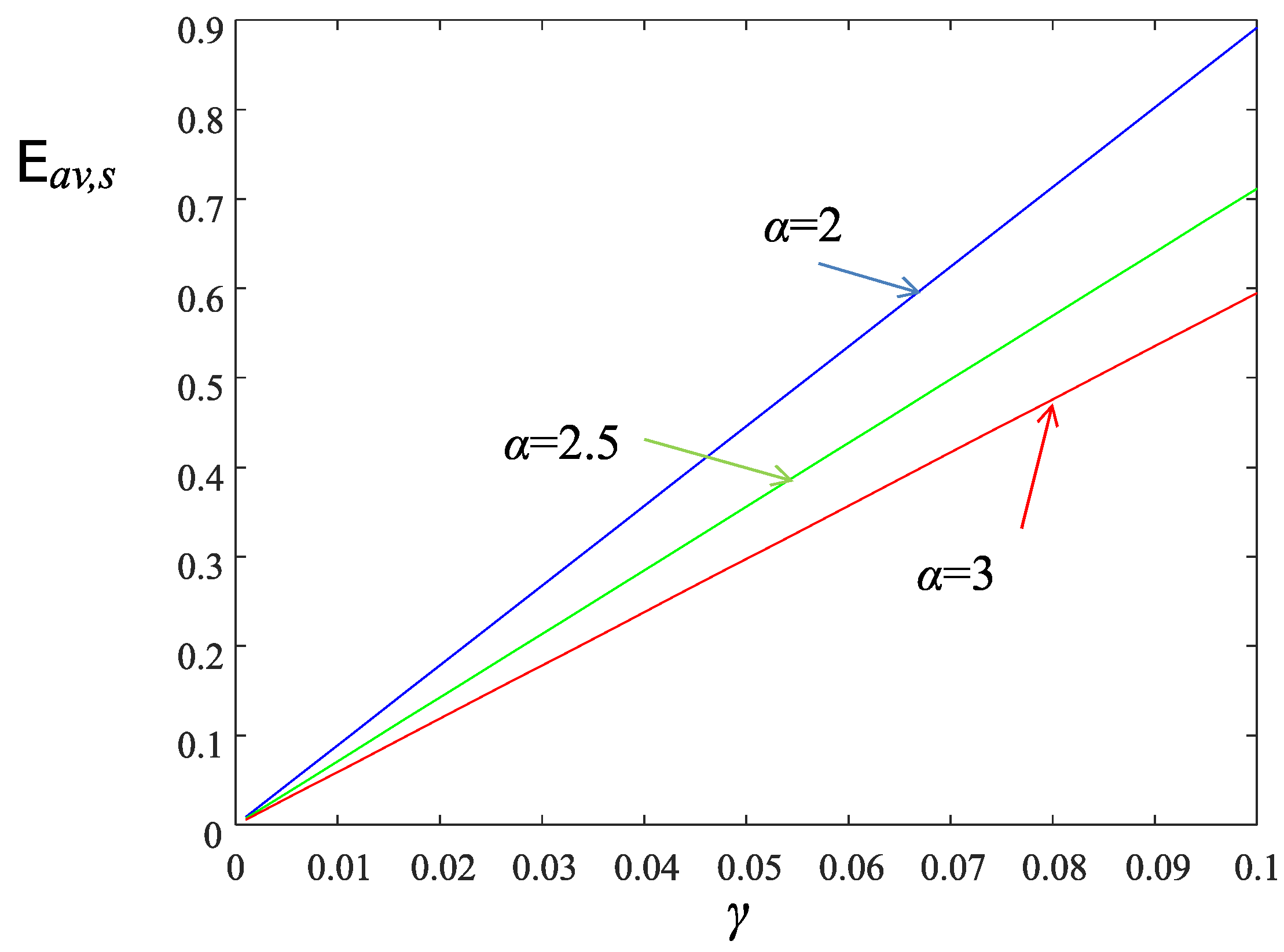
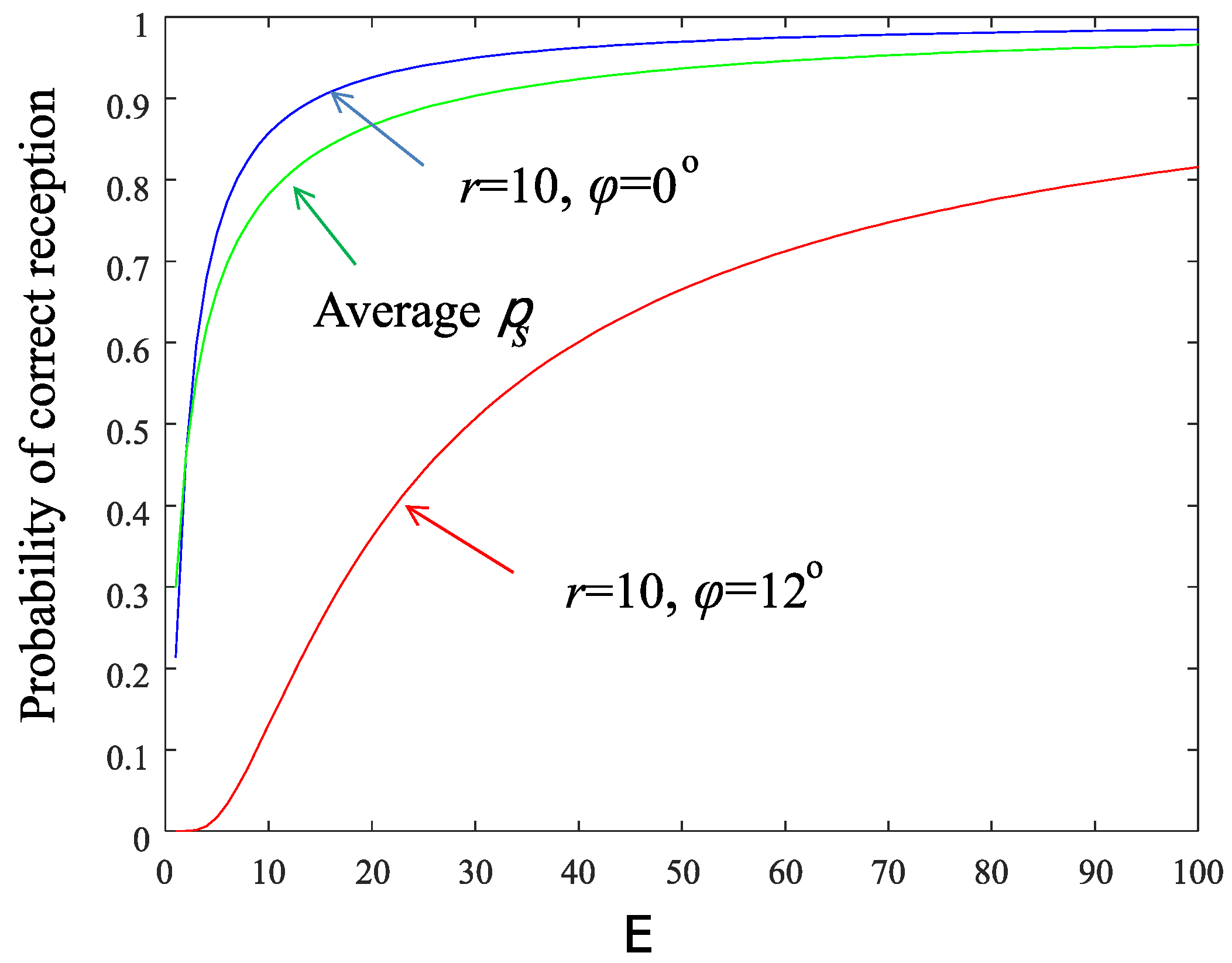
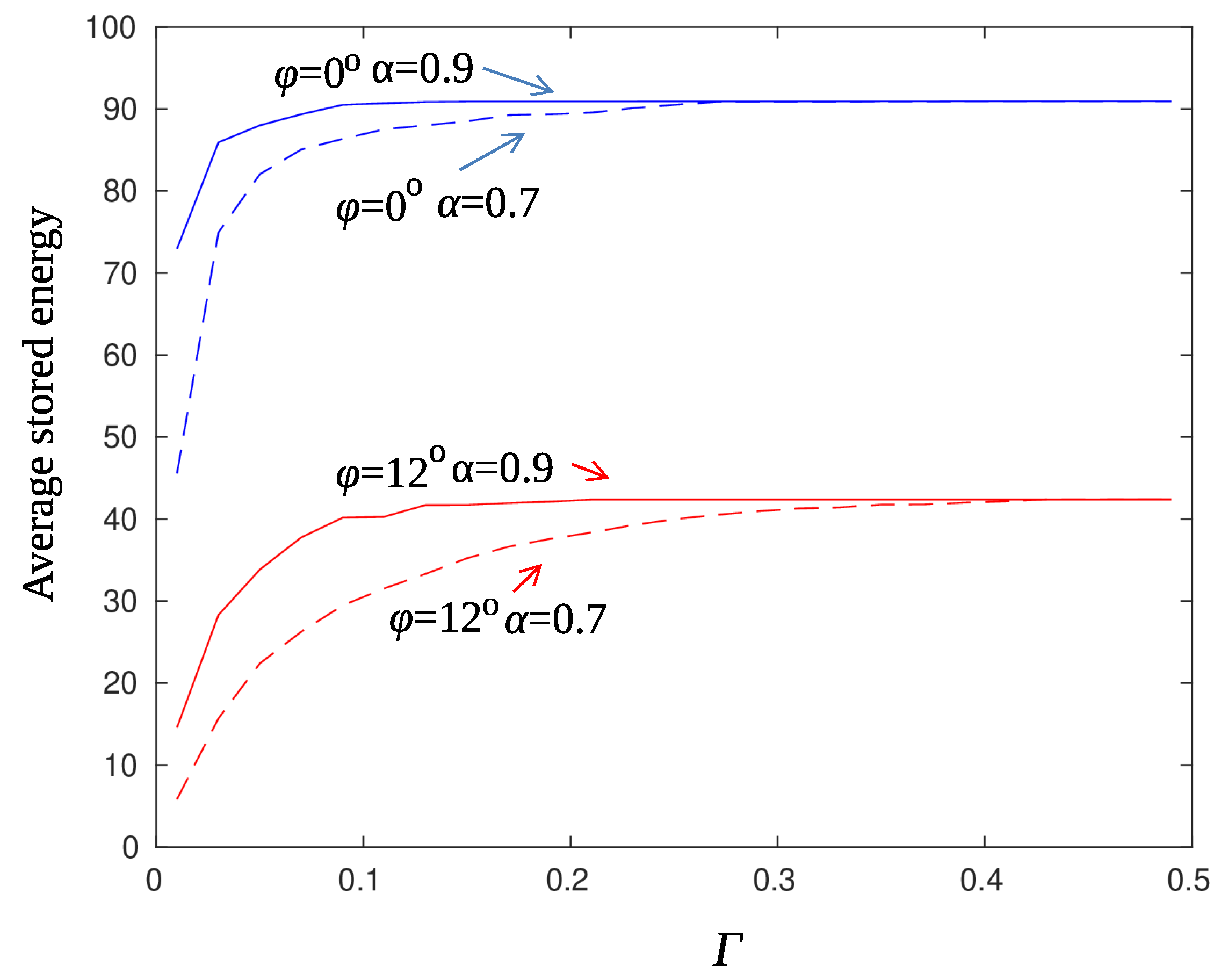
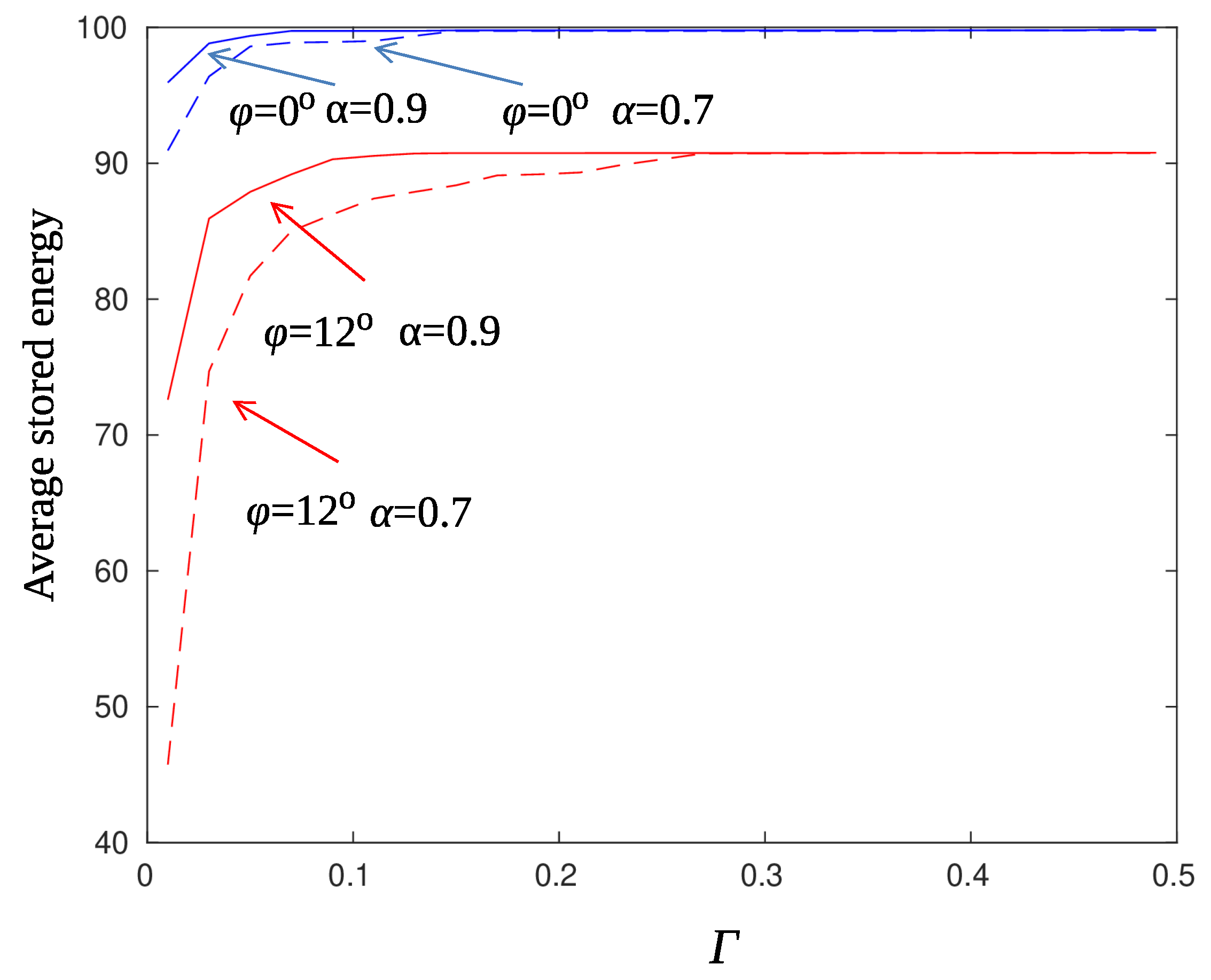
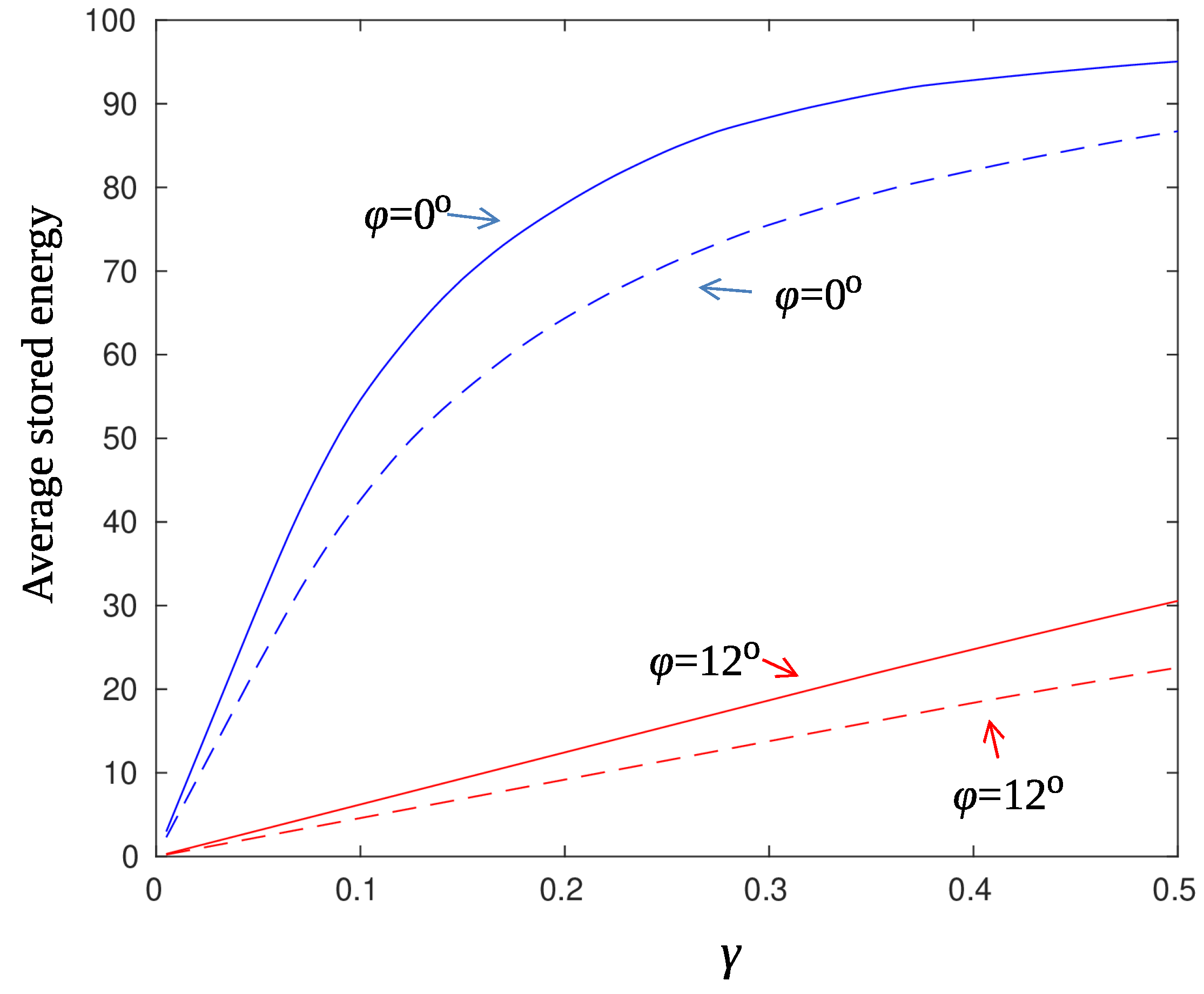
- We derive analytical expressions for the average harvested energy per slot and the probability of successful information reception for a node.
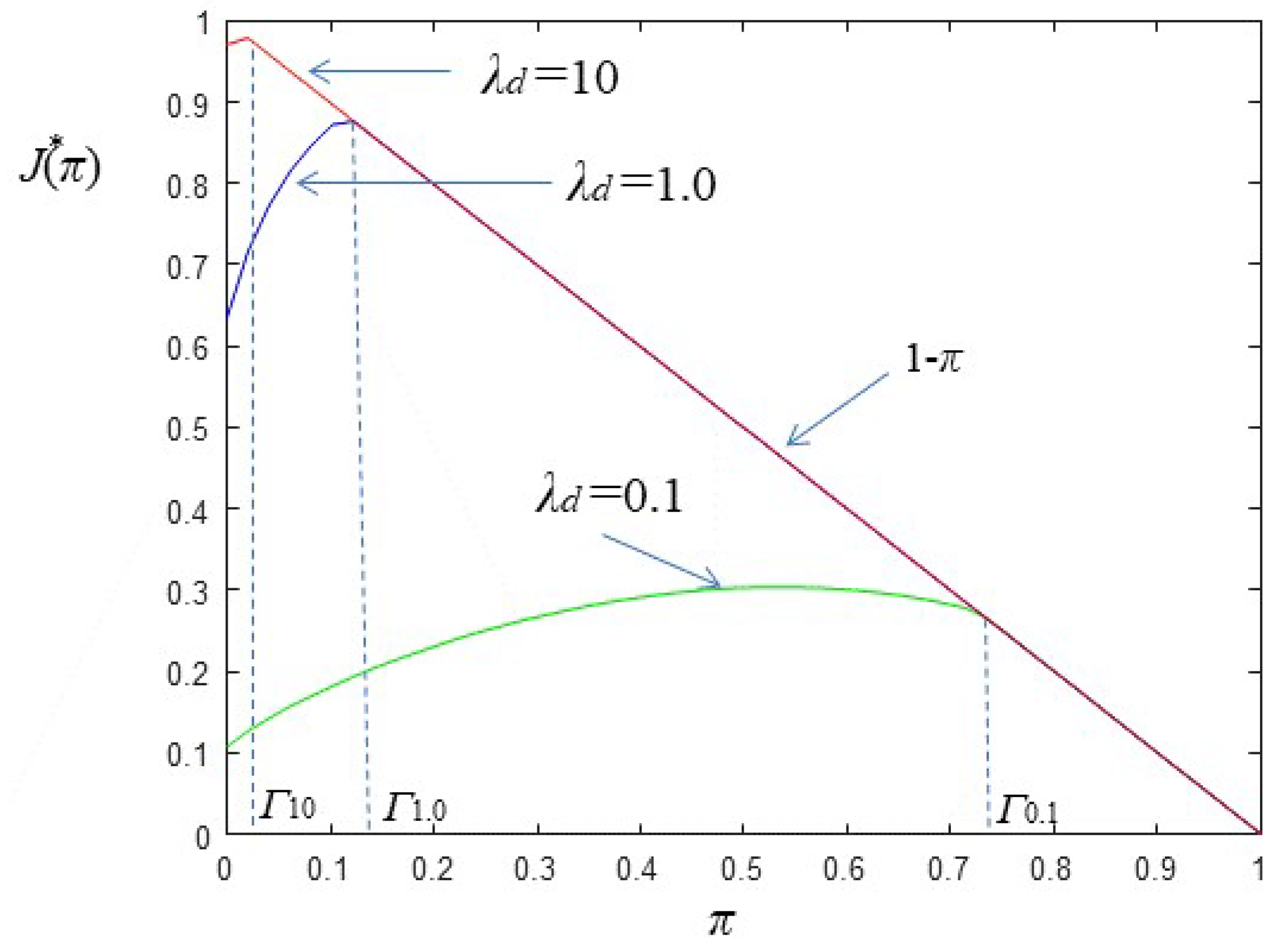
- We define the optimal stopping problem and show that the node has to postpone its transmission, at least until the accumulated energy satisfies a specific criterion.
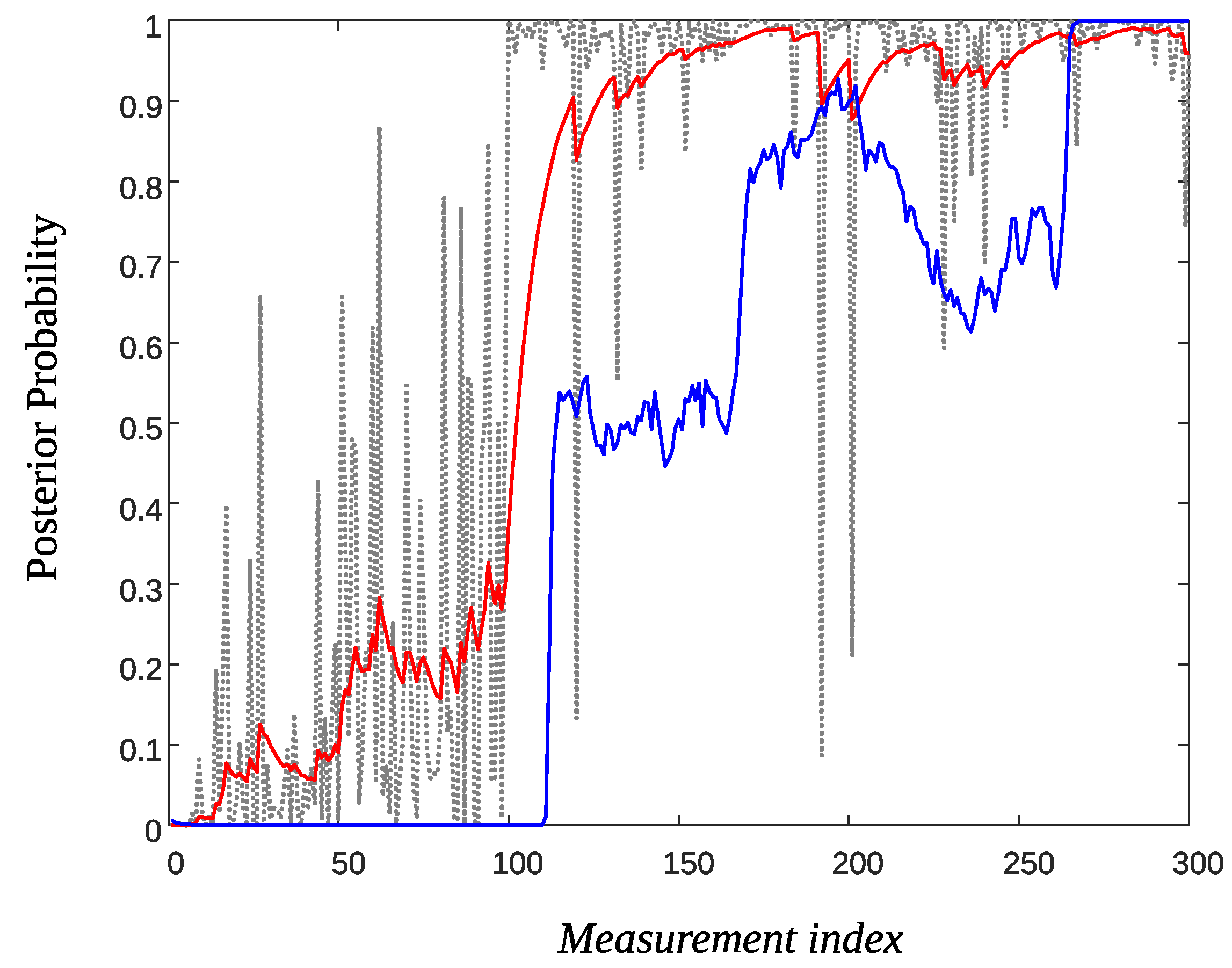
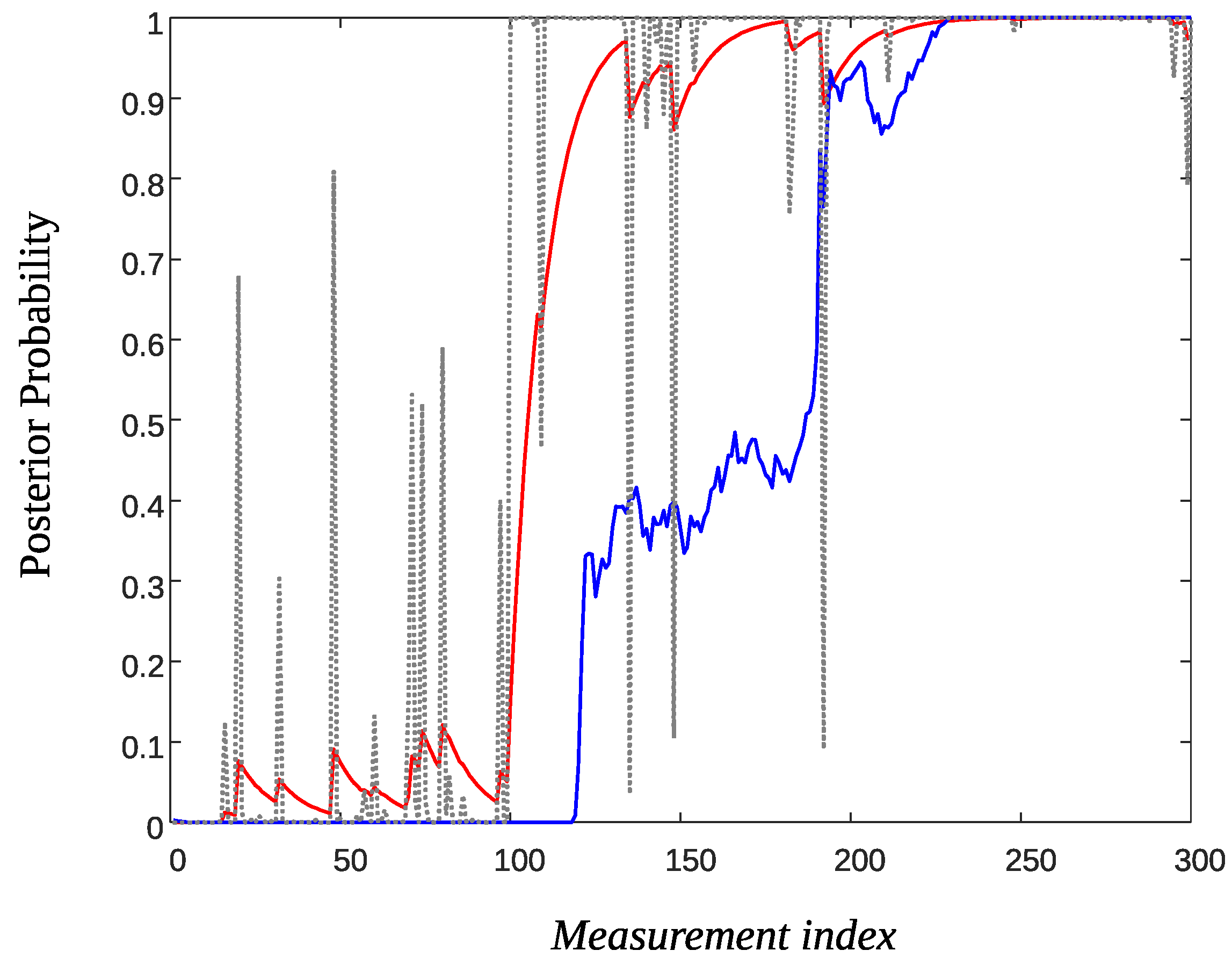
- We propose two solutions to overcome the posterior probability measurement variability problem. The first relies on the use of an AR filter, whereas the second uses a novel technique based on the particle filter theory.
- We assess the performance of the proposed solutions through simulations.
2. Related Work
3. System Model and Analysis
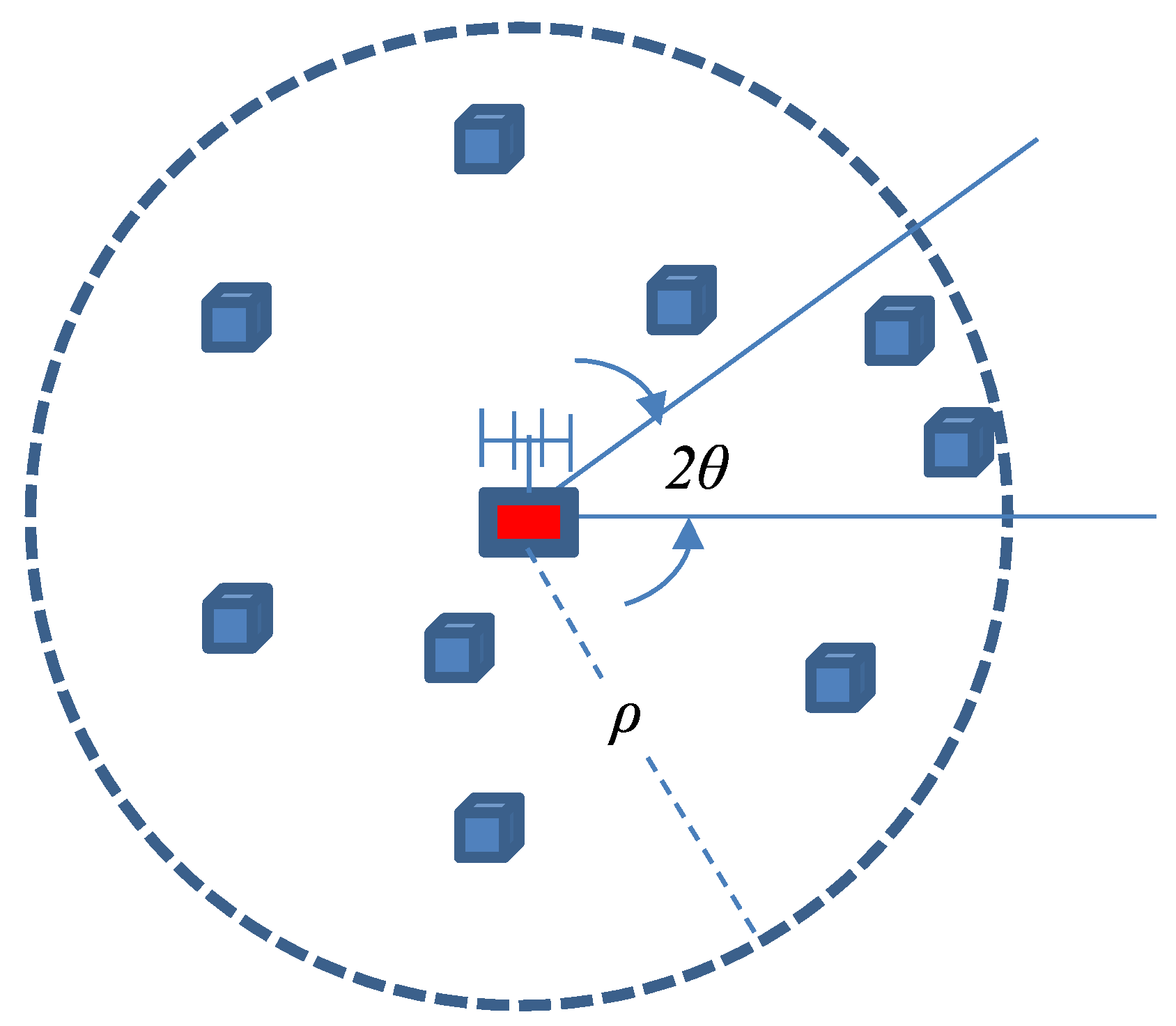
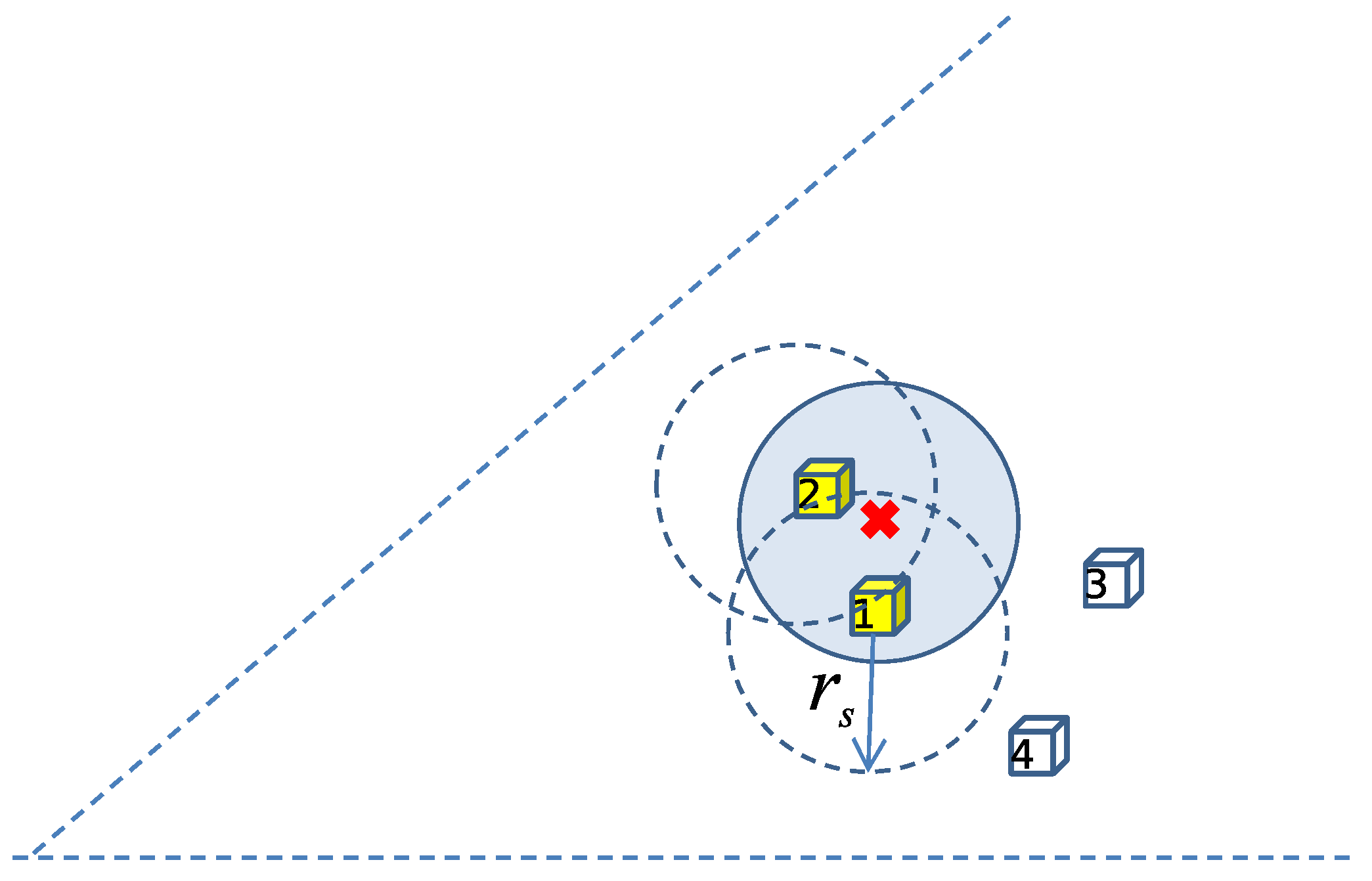
3.1. Network Topology
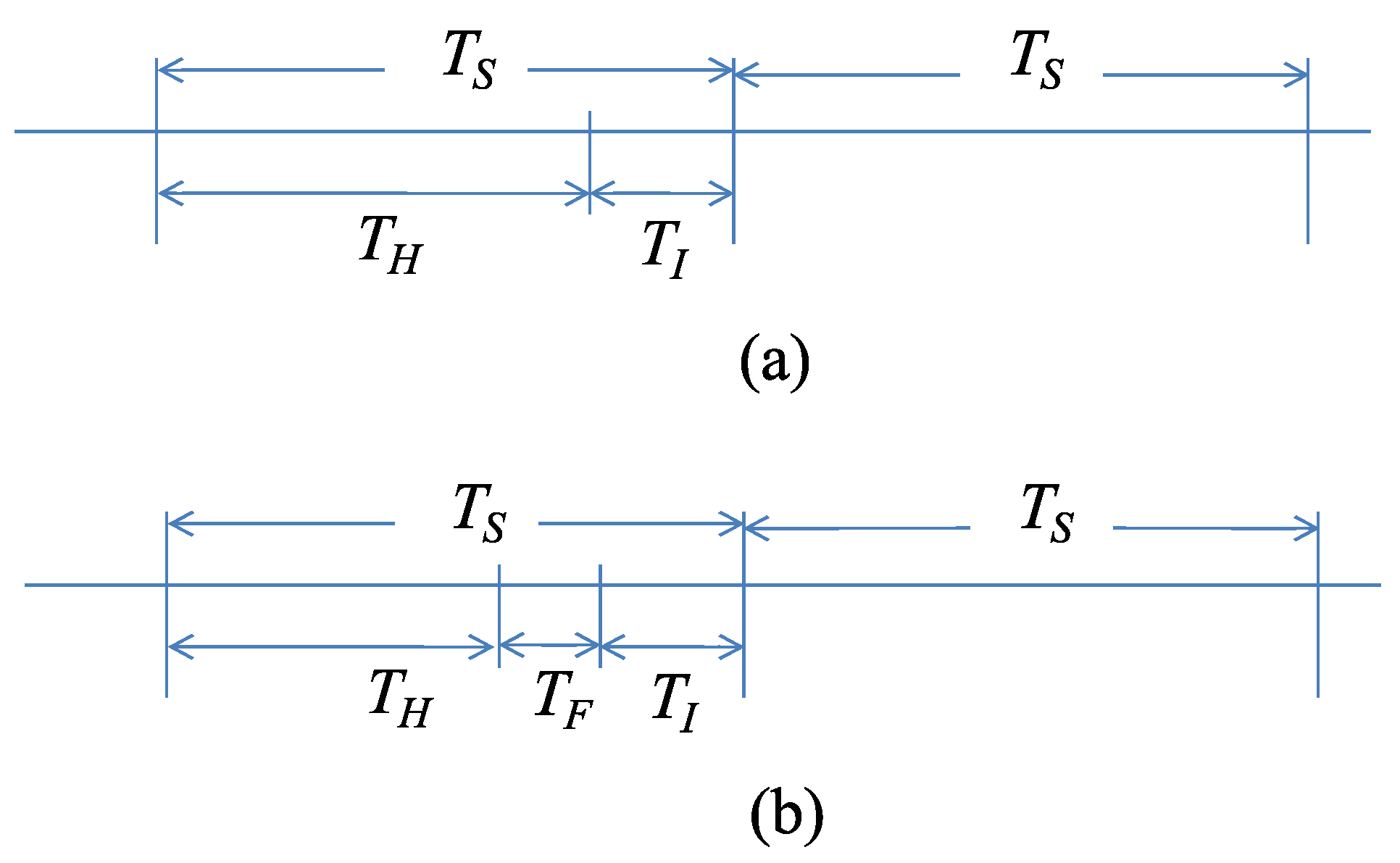
3.2. Energy Harvesting Phase
3.3. Information Transmission Phase
3.4. Sensing Model
4. Detection of Events and Data Fusion
4.1. Event Detection
4.2. Smoothing the Posterior Probability
4.2.1. AR Smoothing
4.2.2. Beta Particle Filter Smoothing
| Algorithm 1 The Beta Particle Filter smoothing algorithm. |
Initialization • Select the number of particle streams K • Generate K samples for the initial state For - draw - set % set initial weights end for Main Loop For For - draw - end for % normalize weights If % was taken equal to - Resample to obtain - Set , end if • Estimate end for |
4.3. Fusion of the Sensor Measurements
5. Simulation Results
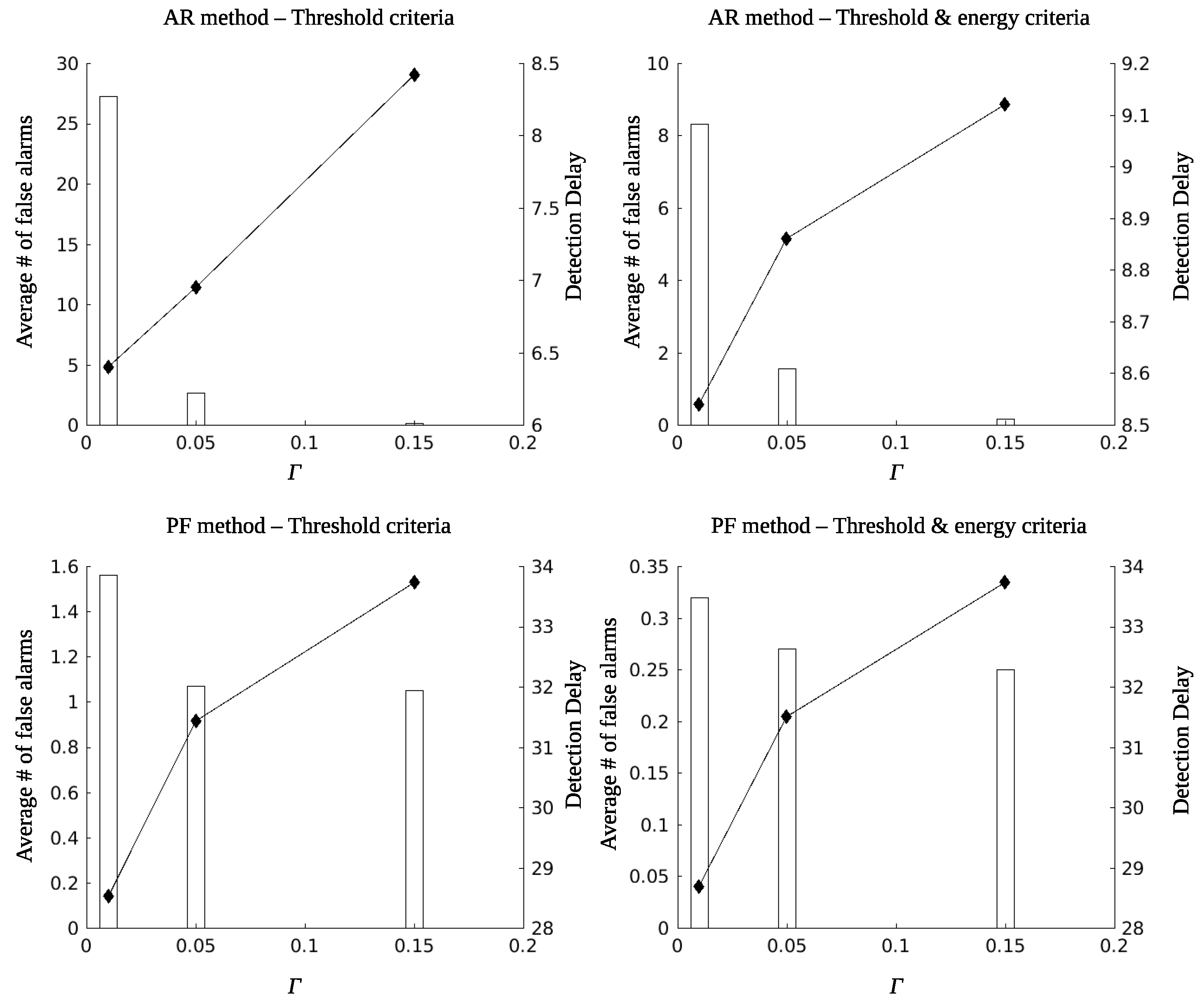
5.1. Charging and False Alarm Rate
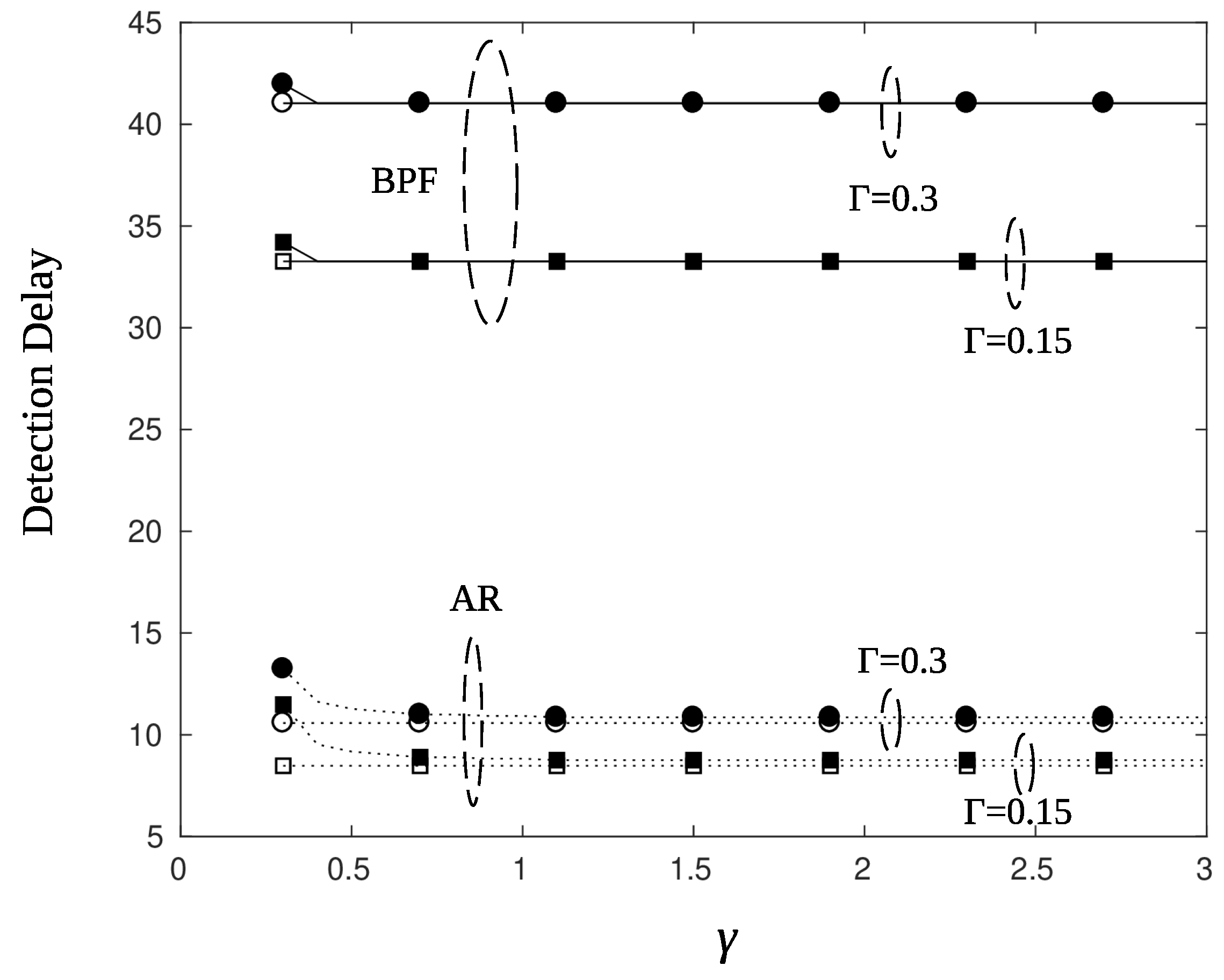
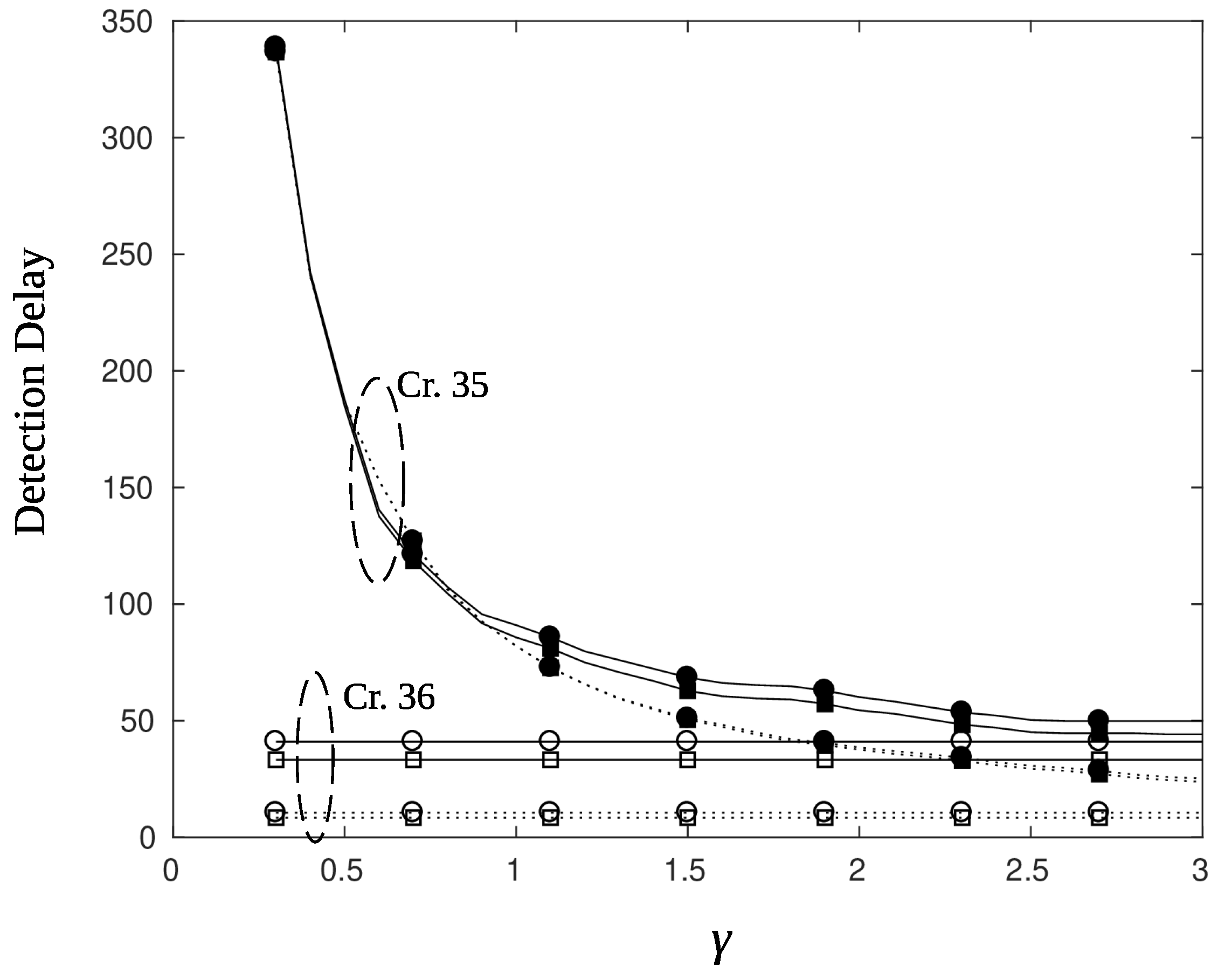
5.2. Charging and Detection Delay
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Djidi, N.E.H.; Gautier, M.; Courtay, A.; Berder, O.; Magno, M. How can wake-up radio reduce lora downlink latency for energy harvesting sensor nodes? Sensors 2021, 21, 733. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, I.; Hee, L.M.; Abdelrhman, A.M.; Imam, S.A.; Leong, M.S. Scopes, challenges and approaches of energy harvesting for wireless sensor nodes in machine condition monitoring systems: A review. Measurement 2021, 183, 109856. [Google Scholar] [CrossRef]
- Shiryaev, A.N. On optimum methods in quickest detection problems. Theory Probab. Its Appl. 1963, 8, 22–46. [Google Scholar] [CrossRef]
- Shiryaev, A.N. Optimal Stopping Rules; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007; Volume 8. [Google Scholar]
- Guo, J.; Zhou, X.; Durrani, S. Wireless power transfer via mmWave power beacons with directional beamforming. IEEE Wirel. Commun. Lett. 2018, 8, 17–20. [Google Scholar] [CrossRef]
- Psomas, C.; Krikidis, I. Energy beamforming in wireless powered mmWave sensor networks. IEEE J. Sel. Areas Commun. 2018, 37, 424–438. [Google Scholar] [CrossRef]
- Hong, Y.W.P.; Hsu, T.C.; Chennakesavula, P. Wireless power transfer for distributed estimation in wireless passive sensor networks. IEEE Trans. Signal Process. 2016, 64, 5382–5395. [Google Scholar] [CrossRef]
- Koutsioumpos, M.; Zervas, E.; Hadjiefthymiades, E.; Merakos, L. Monitoring for Rare Events in a Wireless Powered Communication mmWave Sensor Network. Sensors 2020, 20, 3341. [Google Scholar] [CrossRef] [PubMed]
- Godala, S.; Vaddella, R.P.V. A study on intrusion detection system in wireless sensor networks. Int. J. Commun. Netw. Inf. Secur. 2020, 12, 127–141. [Google Scholar]
- Kandris, D.; Nakas, C.; Vomvas, D.; Koulouras, G. Applications of wireless sensor networks: An up-to-date survey. Appl. Syst. Innov. 2020, 3, 14. [Google Scholar] [CrossRef] [Green Version]
- Safaei, M.; Asadi, S.; Driss, M.; Boulila, W.; Alsaeedi, A.; Chizari, H.; Abdullah, R.; Safaei, M. A systematic literature review on outlier detection in wireless sensor networks. Symmetry 2020, 12, 328. [Google Scholar] [CrossRef] [Green Version]
- Tartakovsky, A.G.; Rozovskii, B.L.; Blažek, R.B.; Kim, H. Detection of intrusions in information systems by sequential change-point methods. Stat. Methodol. 2006, 3, 252–293. [Google Scholar] [CrossRef]
- Tartakovsky, A.G.; Veeravalli, V.V. Change-point detection in multichannel and distributed systems. Appl. Seq. Methodol. Real-World Examples Data Anal. 2004, 173, 339–370. [Google Scholar]
- Xie, Y.; Siegmund, D. Sequential multi-sensor change-point detection. In Proceedings of the 2013 Information Theory and Applications Workshop (ITA), San Diego, CA, USA, 10–15 February 2013; pp. 1–20. [Google Scholar]
- Raghavan, V.; Veeravalli, V.V. Quickest change detection of a Markov process across a sensor array. IEEE Trans. Inf. Theory 2010, 56, 1961–1981. [Google Scholar] [CrossRef] [Green Version]
- Hadjiliadis, O.; Zhang, H.; Poor, H.V. One shot schemes for decentralized quickest change detection. IEEE Trans. Inf. Theory 2009, 55, 3346–3359. [Google Scholar] [CrossRef] [Green Version]
- Moustakides, G.V. Optimal stopping times for detecting changes in distributions. Ann. Stat. 1986, 14, 1379–1387. [Google Scholar] [CrossRef]
- Veeravalli, V.V. Decentralized quickest change detection. IEEE Trans. Inf. Theory 2001, 47, 1657–1665. [Google Scholar] [CrossRef] [Green Version]
- Premkumar, K.; Kumar, A. Optimal sleep-wake scheduling for quickest intrusion detection using wireless sensor networks. In Proceedings of the IEEE INFOCOM 2008-The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 1400–1408. [Google Scholar]
- Zervas, E.; Mpimpoudis, A.; Anagnostopoulos, C.; Sekkas, O.; Hadjiefthymiades, S. Multisensor data fusion for fire detection. Inf. Fusion 2011, 12, 150–159. [Google Scholar] [CrossRef]
- Lorden, G. Procedures for reacting to a change in distribution. Ann. Math. Stat. 1971, 42, 1897–1908. [Google Scholar] [CrossRef]
- Boshkovska, E.; Ng, D.W.K.; Zlatanov, N.; Schober, R. Practical non-linear energy harvesting model and resource allocation for SWIPT systems. IEEE Commun. Lett. 2015, 19, 2082–2085. [Google Scholar] [CrossRef] [Green Version]
- Ding, Z.; Fan, P.; Poor, H.V. Random beamforming in millimeter-wave NOMA networks. IEEE Access 2017, 5, 7667–7681. [Google Scholar] [CrossRef]
- Manatakis, D.V.; Manolakos, E.S. Estimating the spatiotemporal evolution characteristics of diffusive hazards using wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2014, 26, 2444–2458. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| , , | 1500, 0.0022, 100 |
| , , , M | 10 m, , 2, 8 |
| , , | −10 db, −30 db, 1 |
| , | 1024 bits, 1 KHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koutsioumpos, M.; Zervas, E.; Hadjiefthymiades, E.; Merakos, L. A Comprehensive Study of Event Detection in WPCN Networks with Noisy Measurements. Sensors 2022, 22, 2163. https://doi.org/10.3390/s22062163
Koutsioumpos M, Zervas E, Hadjiefthymiades E, Merakos L. A Comprehensive Study of Event Detection in WPCN Networks with Noisy Measurements. Sensors. 2022; 22(6):2163. https://doi.org/10.3390/s22062163
Chicago/Turabian StyleKoutsioumpos, Michael, Evangelos Zervas, Efstathios Hadjiefthymiades, and Lazaros Merakos. 2022. "A Comprehensive Study of Event Detection in WPCN Networks with Noisy Measurements" Sensors 22, no. 6: 2163. https://doi.org/10.3390/s22062163
APA StyleKoutsioumpos, M., Zervas, E., Hadjiefthymiades, E., & Merakos, L. (2022). A Comprehensive Study of Event Detection in WPCN Networks with Noisy Measurements. Sensors, 22(6), 2163. https://doi.org/10.3390/s22062163