
Chemical Spill Encircling Using a Quadrotor and Autonomous Surface Vehicles: A Distributed Cooperative Approach




Abstract
:1. Introduction
2. Preliminaries
2.1. Notation
2.2. Graph Theory
2.3. Uniform B-Spline Curves
3. Vehicle Modelling
3.1. ASV Model
3.2. Quadrotor Model
4. Path Following
- the vehicle’s position converges to a tube around the desired position that can be made arbitrarily small, i.e., converges to a neighbourhood of the origin;
- the speed of the virtual target moving along the path converges to the desired speed profile, i.e., as .
4.1. ASV Path Following
4.2. Quadrotor Path Following
5. Cooperative Path Following
Synchronisation Problem with Event-Triggered Communications
| Algorithm 1 Event-Triggered Communication for vehicle i (adapted from [24]). |
6. Path Planning
- 1
- use the data provided by its navigation system to convert the pixels to a 2-D point cloud expressed in the inertial frame ;
- 2
- remove outliers and perform pre-processing on the 2-D point cloud;
- 3
- generate a smooth and planar reference path by formulating an online optimisation problem that fits the data with open uniform B-splines;
- 4
- send the updated path to the vehicle network;
- 5
- make each vehicle generate an unique path for itself, capturing the pre-defined vehicle formation;
- 6
- repeat the process.
6.1. Planar Point Cloud Generation
6.2. Pre-Processing the Planar Point Cloud
- Remove unused points that are behind the point , i.e., points in region A;
- Order the remaining set of points and remove outliers in region B.
6.2.1. Removing Unused Points
| Algorithm 2 Remove points “behind” the re-planning point. |
|
6.2.2. Ordering a Set of Points and Removing Outliers
| Algorithm 3 Order a set of 2-D points. |
|
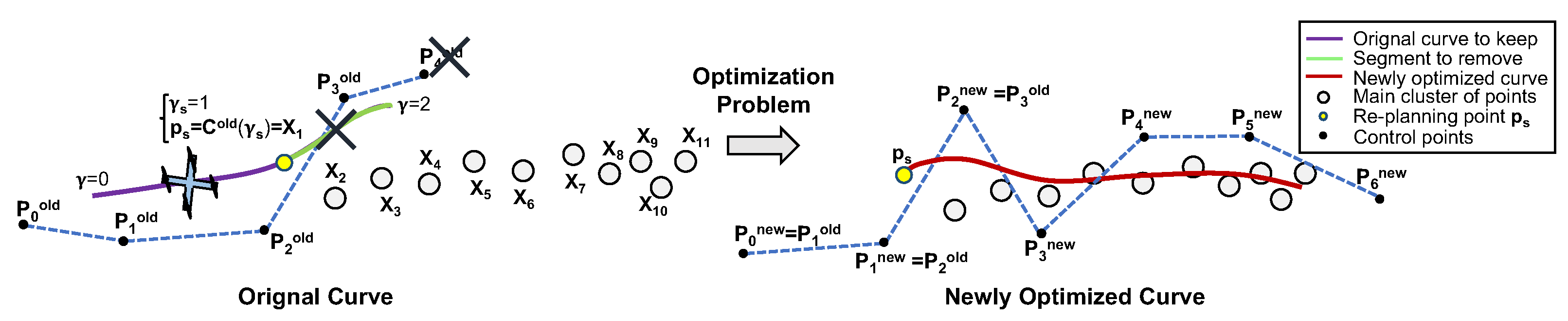
6.3. Path Generation—Approximating the Point Cloud with a Parametric Curve
6.3.1. Define the Number of Segments to Use
6.3.2. Fitting the Points with a Uniform Cubic B-Spline
| Algorithm 4 Fitting the points—growing a uniform cubic B-spline |
|
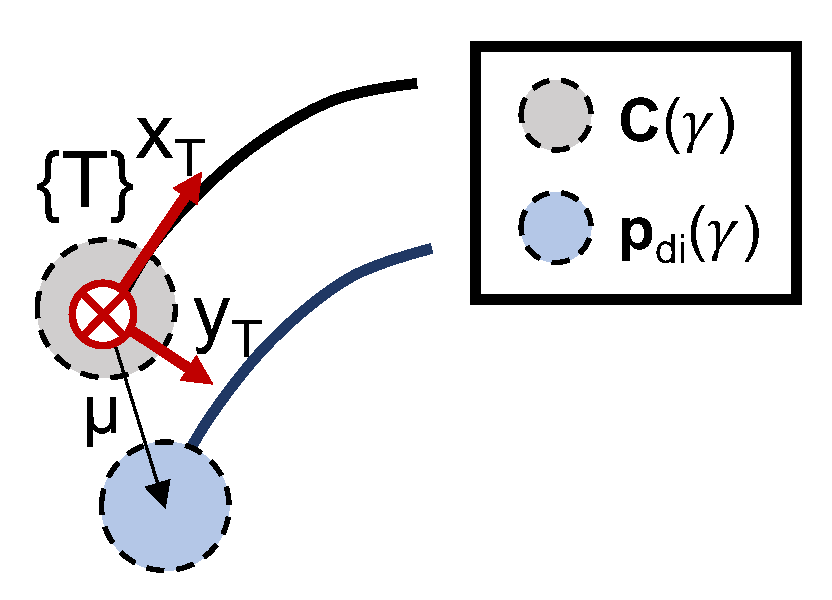
6.4. From 2-D Path to Vehicle Formation
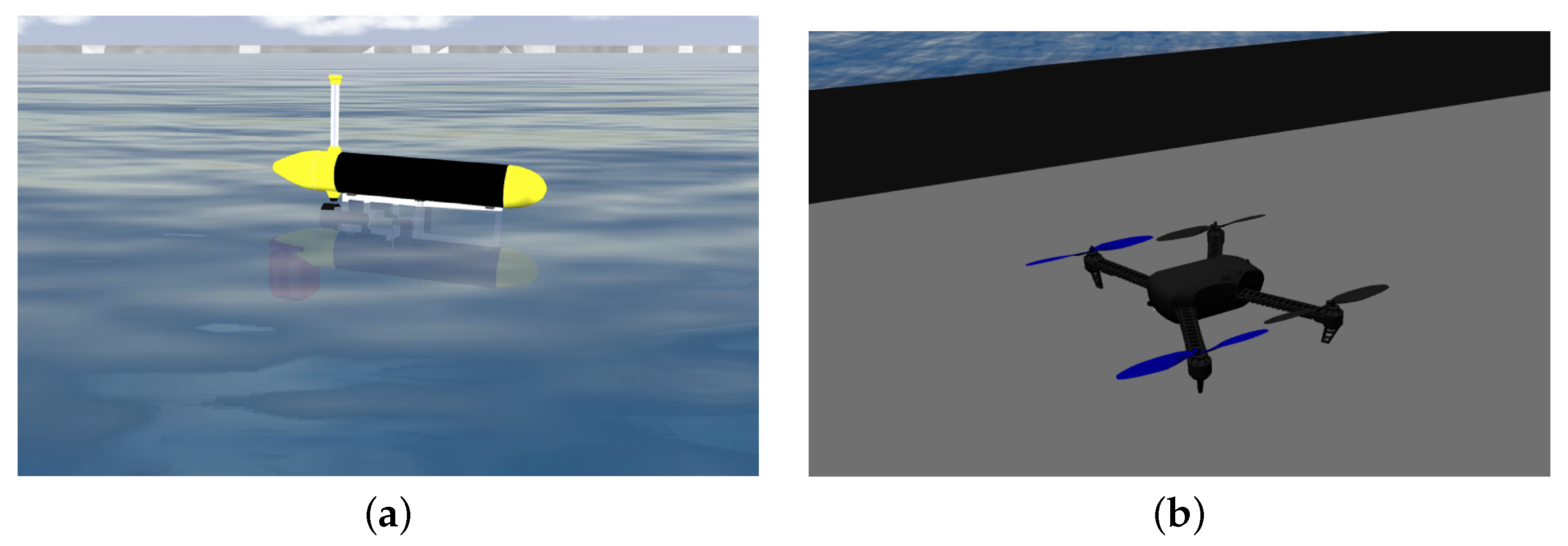
7. Implementation Details
8. Experimental and Simulation Results
8.1. Cpf with ETC between 2 Medusa Vehicles (Real)
8.2. Cpf with ETC between a Quadrotor and Medusa Vehicles (Simulation)
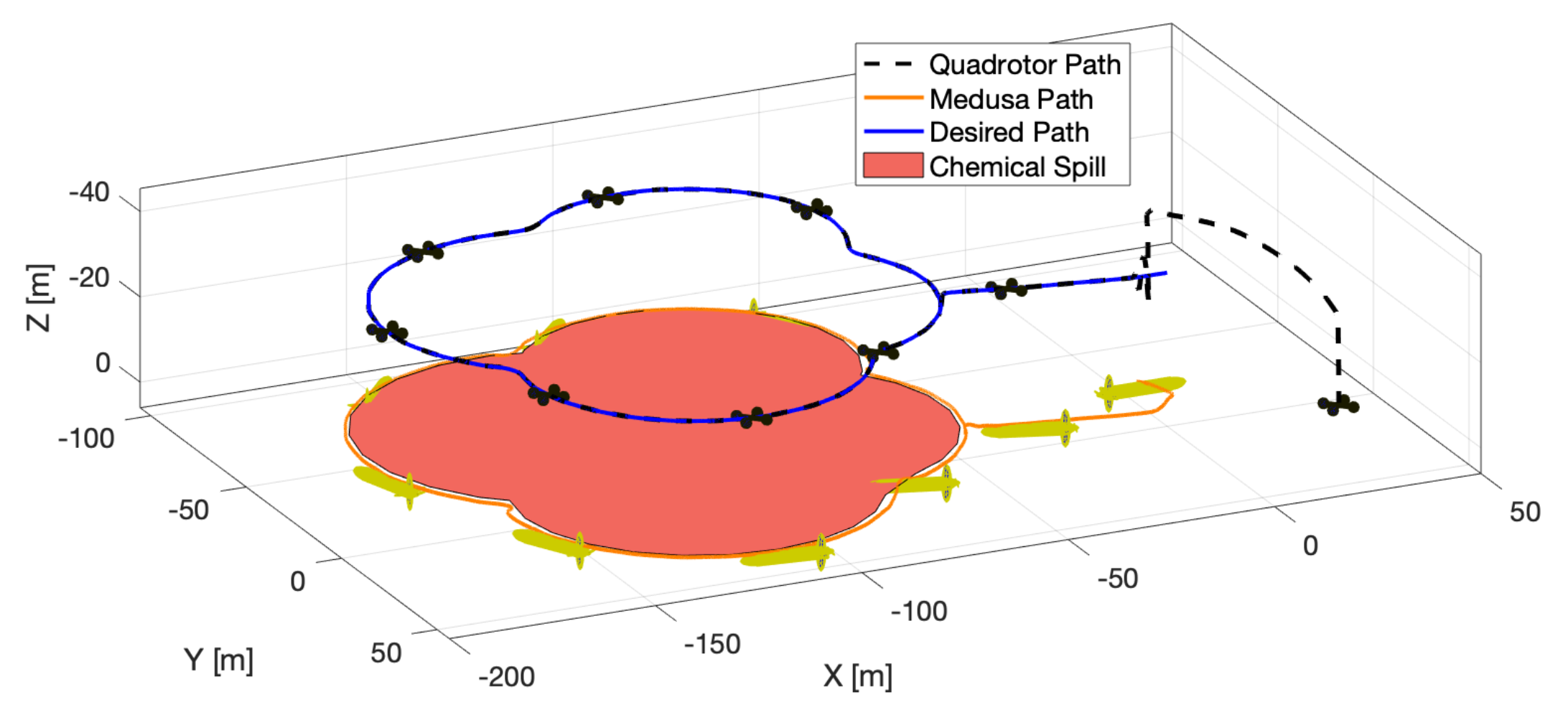
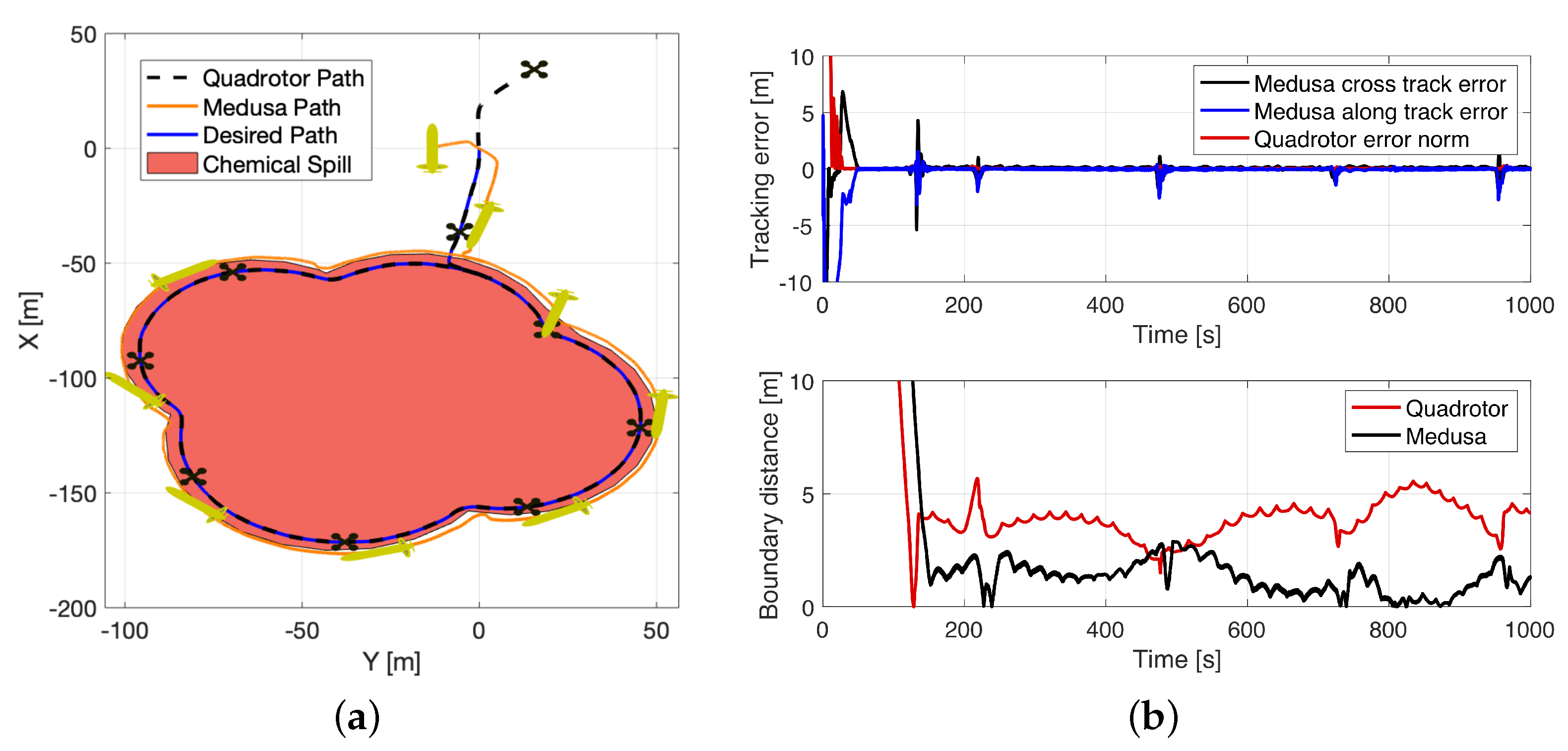
8.3. Boundary Encircling with a Quadrotor and a Medusa Vehicle (Simulation)
9. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Proof of Preposition 1
Appendix B. Proof of Preposition 2
Appendix C. Proof of Preposition 3

Appendix D. Computing the Regularisation Term Using Vectorial Notation
Appendix E. Controller Gains Adopted

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Currents Observer (ASV) | Projection Operator (Quadrotor) | ||
|---|---|---|---|
| and | |||
| Path Following (ASV) | Path Following (Quadrotor) | ||
| Cooperative Path Following | Path Planning | ||
| m | |||
| c | |||
| b | |||
| 1.0 | |||
References
- Casbeer, D.W.; Kingston, D.B.; Beard, R.W.; McLain, T.W. Cooperative forest fire surveillance using a team of small unmanned air vehicles. Int. J. Syst. Sci. 2006, 37, 351–360. [Google Scholar] [CrossRef]
- Fahad, M.; Saul, N.; Guo, Y.; Bingham, B. Robotic simulation of dynamic plume tracking by Unmanned Surface Vessels. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2654–2659. [Google Scholar] [CrossRef]
- Pettersson, L.; Pozdnyakov, D. Monitoring of Harmful Algal Blooms, 1st ed.; Springer Science & Business Media: Berlin, Germany, 2013; p. 309. [Google Scholar] [CrossRef]
- Sukhinov, A.; Chistyakov, A.; Nikitina, A.; Semenyakina, A.; Korovin, I.; Schaefer, G. Modelling of oil spill spread. In Proceedings of the 2016 5th International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 13–14 May 2016; pp. 1134–1139. [Google Scholar] [CrossRef]
- Li, S.; Guo, Y.; Bingham, B. Multi-robot cooperative control for monitoring and tracking dynamic plumes. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 67–73. [Google Scholar] [CrossRef]
- Clark, J.; Fierro, R. Cooperative hybrid control of robotic sensors for perimeter detection and tracking. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005; Volume 5, pp. 3500–3505. [Google Scholar] [CrossRef] [Green Version]
- Saldaña, D.; Assunção, R.; Hsieh, M.A.; Campos, M.F.M.; Kumar, V. Cooperative prediction of time-varying boundaries with a team of robots. In Proceedings of the 2017 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), Los Angeles, CA, USA, 4–5 December 2017; pp. 9–16. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The Nurbs Book, 1 ed.; Springer Science & Business Media: Berlin, Germany, 1995; p. 646. [Google Scholar] [CrossRef]
- International Petroleum Industry Environmental Conservation Association (IPIECA). Dispersants and Their Role in Oil Spill Response. Volume 5. Available online: https://www.amn.pt/DCPM/Documents/DispersantsII.pdf (accessed on 8 March 2022).
- Aguiar, A.P.; Hespanha, J.P. Trajectory-Tracking and Path-Following of Underactuated Autonomous Vehicles with Parametric Modeling Uncertainty. IEEE Trans. Autom. Control. 2007, 52, 1362–1379. [Google Scholar] [CrossRef] [Green Version]
- Vanni, F.; Aguiar, A.P.; Pascoal, A.M. Cooperative path-following of underactuated autonomous marine vehicles with logic-based communication. In Proceedings of the 2nd IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles, Killaloe, Ireland, 8–10 April 2008; Volume 41, pp. 107–112. [Google Scholar] [CrossRef] [Green Version]
- Aguiar, A.P.; Ghabcheloo, R.; Pascoal, A.M.; Silvestre, C. Coordinated Path-Following Control of Multiple Autonomous Underwater Vehicles. In Proceedings of the Seventeenth International Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007. ISOPE-I-07-006. [Google Scholar]
- Hung, N.T.; Rego, F.C.; Pascoal, A.M. Event-Triggered Communications for the Synchronization of Nonlinear Multi Agent Systems on Weight-Balanced Digraphs. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 2713–2718. [Google Scholar] [CrossRef]
- Abreu, P.; Botelho, J.; Góis, P.; Pascoal, A.; Ribeiro, J.; Ribeiro, M.; Rufino, M.; Sebastião, L.; Silva, H. The MEDUSA class of autonomous marine vehicles and their role in EU projects. In Proceedings of the OCEANS Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Furrer, F.; Burri, M.; Achtelik, M.; Siegwart, R. Robot Operating System (ROS): The Complete Reference (Volume 1); Springer International Publishing: Cham, Switzerland, 2016; pp. 595–625, chapter RotorS—A Modular Gazebo MAV Simulator Framework. [Google Scholar] [CrossRef]
- Manhães, M.; Scherer, S.A.; Voss, M.; Douat, L.R.; Rauschenbach, T. UUV Simulator: A Gazebo-based package for underwater intervention and multi-robot simulation. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Dey, T.K. Course 784 Notes—The Ohio State University—Lecture 7: Matrix Form for B-Spline Curves. Available online: https://web.cse.ohio-state.edu/~dey.8/course/784/note7.pdf (accessed on 16 January 2022).
- Pascoal, A.; Kaminer, I.; Oliveira, P. Navigation system design using time-varying complementary filters. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1099–1114. [Google Scholar] [CrossRef]
- Sanches, G. Sensor-Based Formation Control of Autonomous Marine Robots. Master’s Thesis, Instituto Superior Técnico, Lisbon, Portugal, 2015. [Google Scholar]
- Xie, W.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Robust Motion Control of an Underactuated Hovercraft. IEEE Trans. Control. Syst. Technol. 2019, 27, 2195–2208. [Google Scholar] [CrossRef]
- Cabecinhas, D.; Cunha, R.; Silvestre, C. A nonlinear quadrotor trajectory tracking controller with disturbance rejection. Control. Eng. Pract. 2014, 26, 1–10. [Google Scholar] [CrossRef]
- Cai, Z.; de Queiroz, M.; Dawson, D. A sufficiently smooth projection operator. IEEE Trans. Autom. Control. 2006, 51, 135–139. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Pascoal, A.M. Coordinated path-following control for nonlinear systems with logic-based communication. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 1473–1479. [Google Scholar] [CrossRef]
- Hung, N.T.; Pascoal, A.M. Consensus/synchronisation of networked nonlinear multiple agent systems with event-triggered communications. Int. J. Control. 2020, 1–10. [Google Scholar] [CrossRef]
- Odonkor, P.; Ball, Z.; Chowdhury, S. Distributed operation of collaborating unmanned aerial vehicles for time-sensitive oil spill mapping. Swarm Evol. Comput. 2019, 46, 52–68. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer Science & Business Media: Berlin, Germany, 2011; Volume 5. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, H.; Wang, W. Reconstructing B-spline Curves from Point Clouds—A Tangential Flow Approach Using Least Squares Minimization. In Proceedings of the International Conference on Shape Modeling and Applications 2005 (SMI’ 05), Cambridge, MA, USA, 13–17 June 2005; pp. 4–12. [Google Scholar] [CrossRef] [Green Version]
- Lee, I.K. Curve reconstruction from unorganized points. Comput. Aided Geom. Des. 2000, 17, 161–177. [Google Scholar] [CrossRef] [Green Version]
- Bentley, J.L. Multidimensional Binary Search Trees Used for Associative Searching. Commun. ACM 1975, 18, 509–517. [Google Scholar] [CrossRef]
- Liu, M.; Huang, S.; Dissanayake, G.; Kodagoda, S. Towards a consistent SLAM algorithm using B-Splines to represent environments. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 2065–2070. [Google Scholar] [CrossRef] [Green Version]
- Xie, W.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Cooperative Path Following Control of Multiple Quadcopters with Unknown External Disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 667–679. [Google Scholar] [CrossRef]
- Bradski, G. The OpenCV library. Dr. Dobb’s J. Softw. Tools 2000, 120, 122–125. [Google Scholar]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental algorithms for scientific computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khalil, H. Nonlinear Systems, 3rd ed.; Always Learning; Pearson Education Limited: New York, NY, USA, 2013. [Google Scholar]






















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jacinto, M.; Cunha, R.; Pascoal, A. Chemical Spill Encircling Using a Quadrotor and Autonomous Surface Vehicles: A Distributed Cooperative Approach. Sensors 2022, 22, 2178. https://doi.org/10.3390/s22062178
Jacinto M, Cunha R, Pascoal A. Chemical Spill Encircling Using a Quadrotor and Autonomous Surface Vehicles: A Distributed Cooperative Approach. Sensors. 2022; 22(6):2178. https://doi.org/10.3390/s22062178
Chicago/Turabian StyleJacinto, Marcelo, Rita Cunha, and António Pascoal. 2022. "Chemical Spill Encircling Using a Quadrotor and Autonomous Surface Vehicles: A Distributed Cooperative Approach" Sensors 22, no. 6: 2178. https://doi.org/10.3390/s22062178
APA StyleJacinto, M., Cunha, R., & Pascoal, A. (2022). Chemical Spill Encircling Using a Quadrotor and Autonomous Surface Vehicles: A Distributed Cooperative Approach. Sensors, 22(6), 2178. https://doi.org/10.3390/s22062178