
Capturing Upper Body Kinematics and Localization with Low-Cost Sensors for Rehabilitation Applications

 , , , and
, , , and
Abstract
:1. Introduction
1.1. Overview
1.2. Background and Related Work on Localization
1.3. Background and Related Work on Motion Inference
1.4. Contributions
2. Materials and Methods for Positioning
2.1. Overview
2.2. Methods for Localization—Proximity Reporting
2.2.1. Overview of Neural Network
2.2.2. System Setup and Data Generation for Proximity Reporting
2.2.3. Training of Recurrent Neural Network for Proximity Reporting
2.2.4. Testing Stage for Proximity Reporting
- Proximity accuracy: this specifies the indoor system’s ability to detect whether the simulated patient is within a predefined range from the anchor.
- Distance accuracy: this specifies the indoor system’s ability to detect when the simulated patient is not within a predefined range from the anchor.
- Overall accuracy: this specifies the indoor system’s ability to either place the simulated patient within range from the anchor or to determine the absence of the simulated patient within a certain range from the anchor.
2.3. Localization with Real Data
2.3.1. Training of RSS Fingerprinting Technique with Real Data
2.3.2. Specifications of Area of Interest
2.3.3. Real-World Validation
| Algorithm 1 Generate Closest Fingerprints. |
|
| Algorithm 2 Get Position Estimates Using K-Nearest Neighbors. |
Require:
|
3. Materials and Methods for Kinematics Estimation
3.1. Overview
3.2. Training Dataset Description
3.3. Subtask 1: Model Generation
3.3.1. Training Inputs and Outputs
3.3.2. Deep Learning Models
3.3.3. Training Parameters, Hyperparameter Tuning, and Performance Matrices
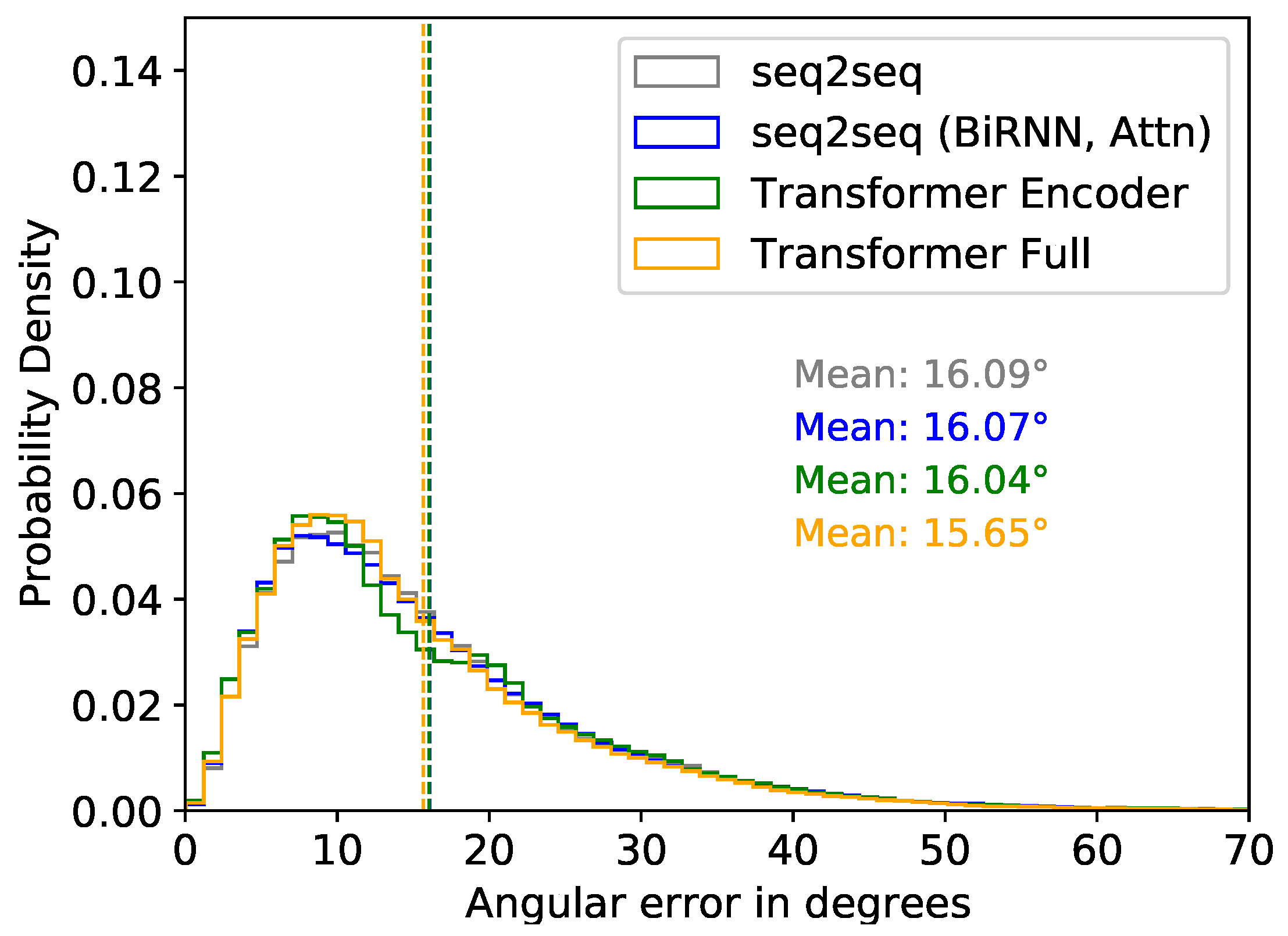
3.3.4. Training Performance Evaluation
3.4. Subtask 2: Inference
3.4.1. Test Dataset Overview
3.4.2. Data Collection
3.4.3. Study Design
3.4.4. Mathematical Framework: Inference Inputs and Outputs, and Sensor Calibration
4. Results
4.1. Localization Results: Proximity Reporting in Simulation
4.2. Localization Results: Proximity Reporting with Real World Data
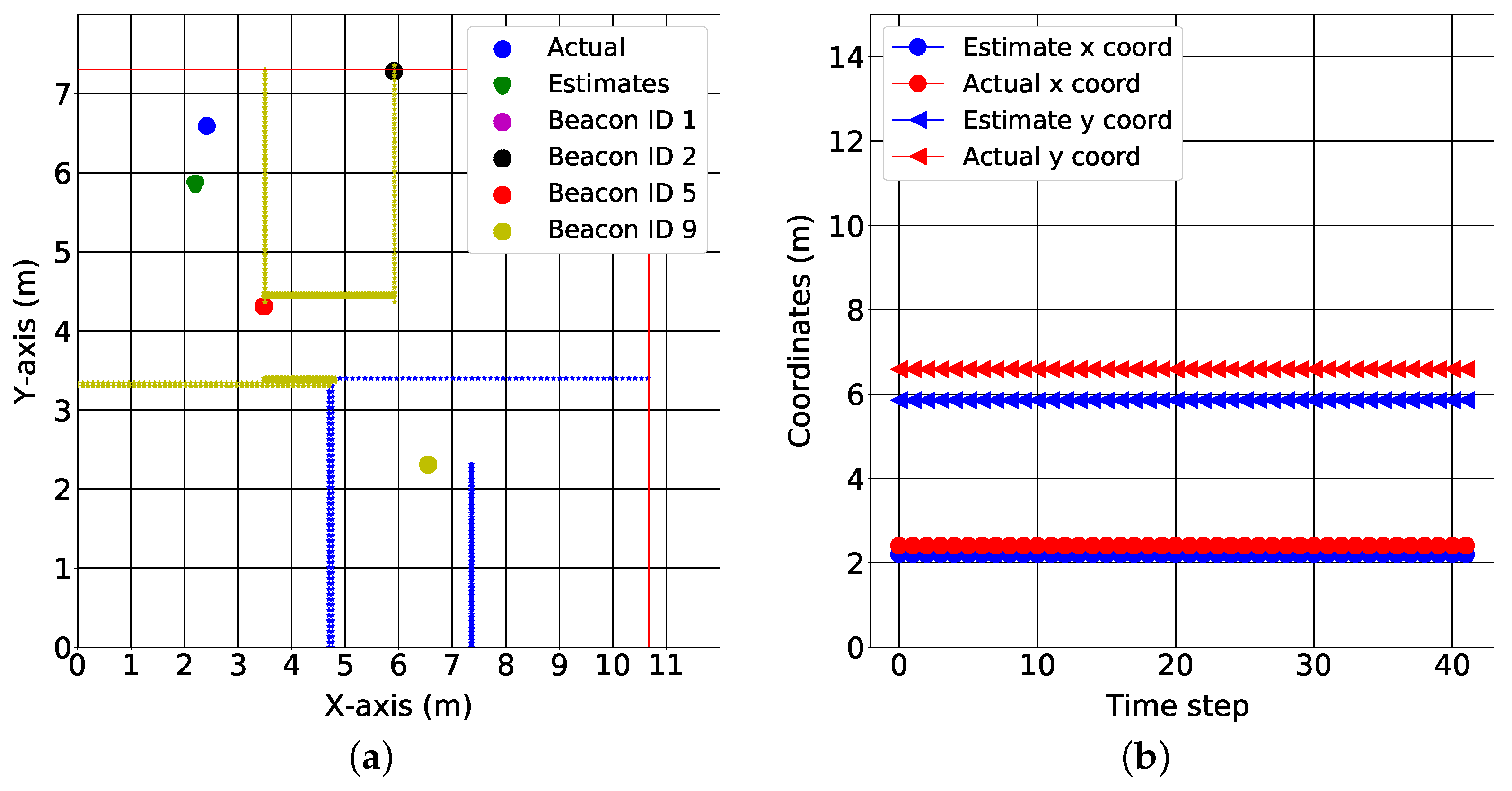
4.3. Localization Results: Positioning with Real World Data
4.4. Motion Inference Results
4.4.1. Quantitative Analysis
Test Performance Evaluation Using Sparse Segments of XSens MVN
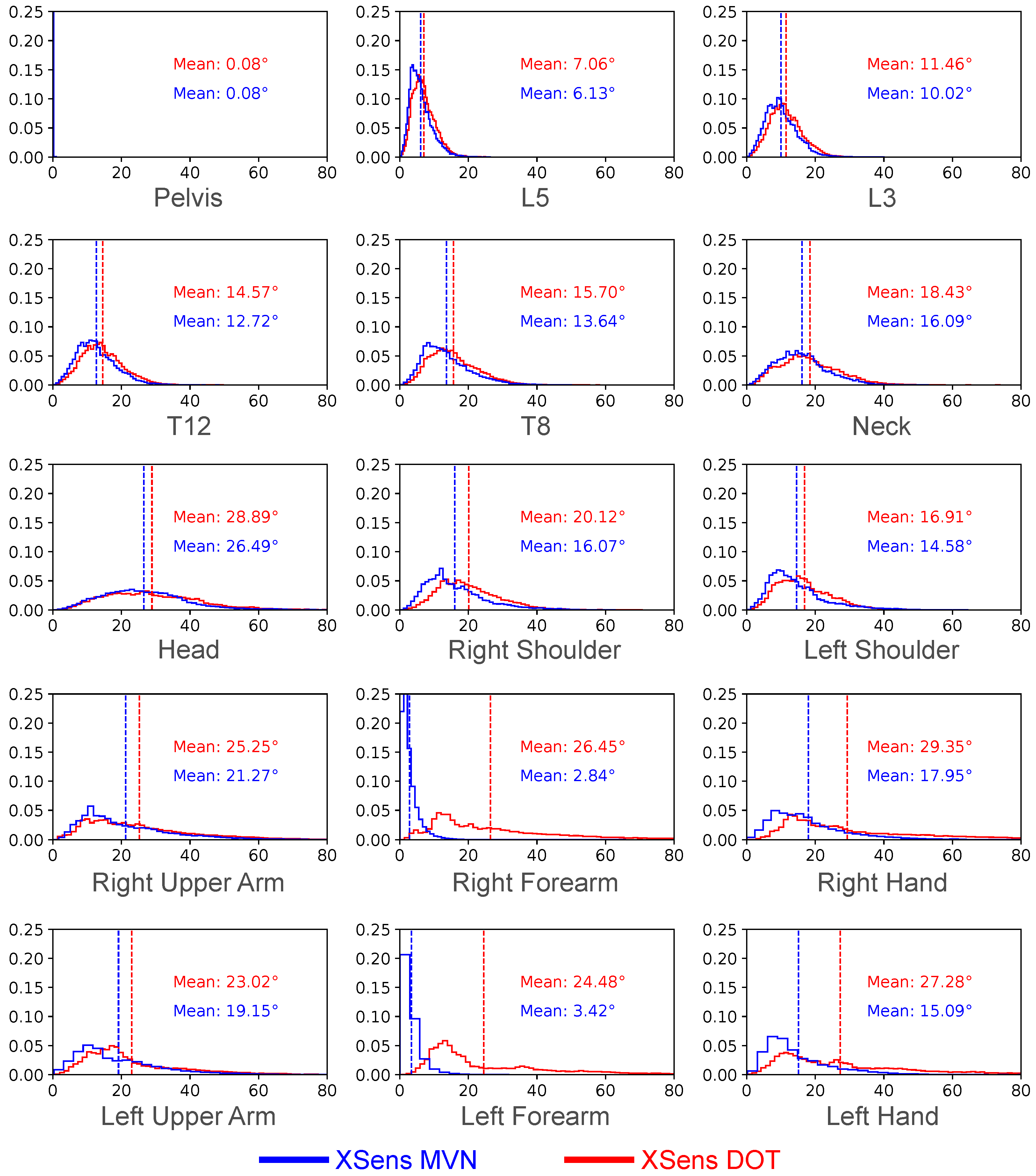
Test Performance Evaluation Using XSens DOT Sensors
Comparison of Segment-Wise Mean Angular Error of Predictions by XSens MVN and XSens DOT Sensors
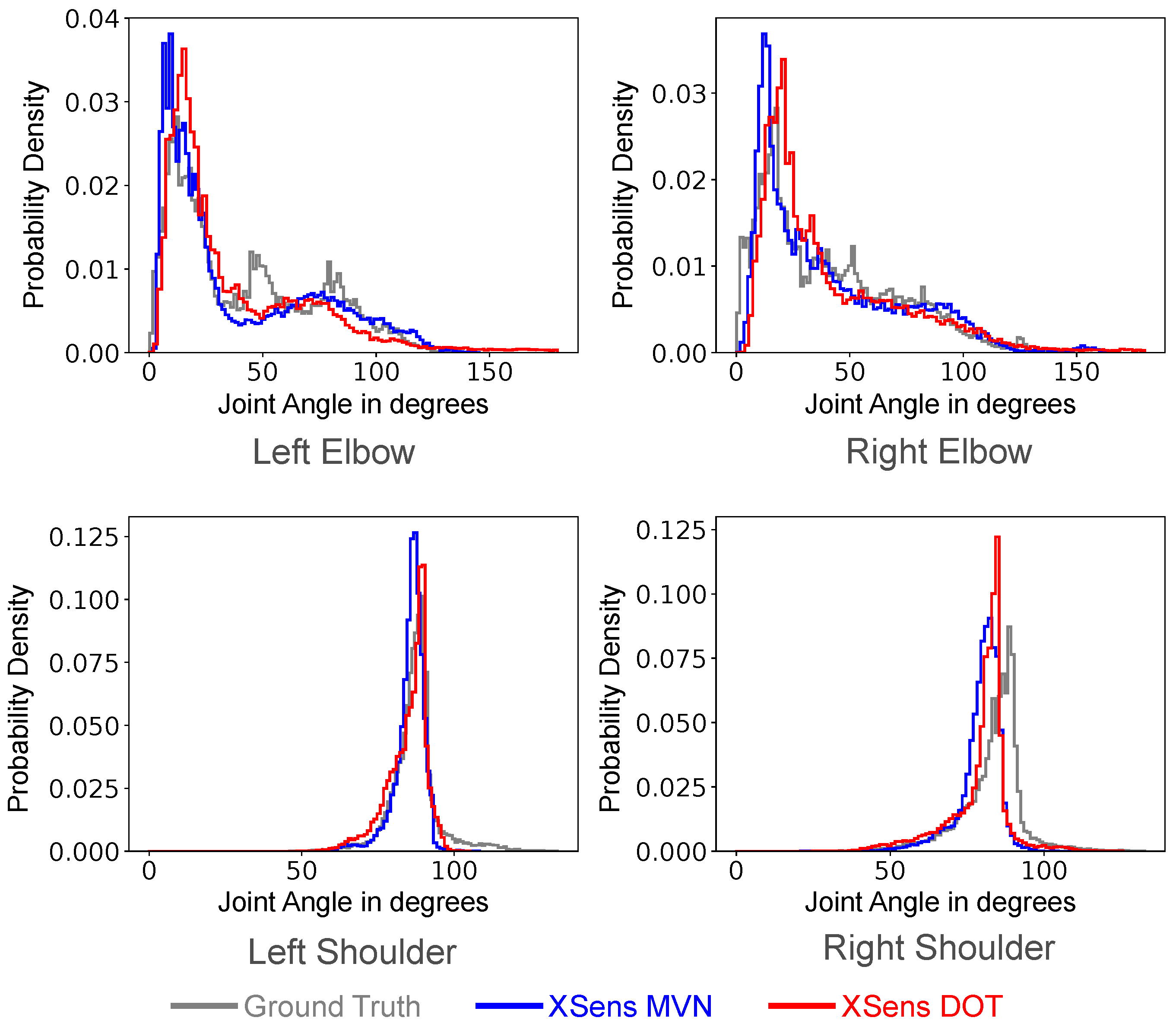
4.4.2. Qualitative Analysis
5. Discussion
5.1. Discussion on Localization
5.1.1. Proximity Reporting
5.1.2. Positioning with Real World Data
5.2. Discussion on Motion Inference
5.3. Limitations of our Study
Motion Inference
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Detailed List of ADL Activities

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task Group | Room Preparation and List of Activities in Details | Activity Time |
|---|---|---|
| (1) Walking 3 Laps in the room | Setup/Room Preparation: Remove any objects from the ground. Make sure there are minimal obstacles in the room while walking. Direction/Steps of activities:
| |
| (2) Pick up things (clothing, books, toys, words blocks, safety pins) off floor, tidy up in order to vacuum, then vacuum. | Setup/Room Preparation: Place variety of items scattered across floor. Make sure vacuum is present and accessible. Initially 5 objects (book, toy, pen, cloth, coffee mug). Direction/Steps of activities:
| 4 |
| (3) Fold laundry and put it away in cabinets with appropriateabel/low drawers in multiple rooms (i.e., bedroom, linen closet, kitchen towels, hanging clothes, etc.) | Setup/Room Preparation: Prepare laundry basket. Include linens, hanging clothes, and folded clothes. These cloths will be placed in drawers, shelves, and linen closet labeled. Direction/Steps of activities:
| |
| (4) Packing and unpacking a bag of groceries and put each piece in the cabinet/fridge with the appropriate label (by category). | Setup/Room Preparation: Need to place grocery items (5 items, e.g., a bag of coffee beans, jar of sugar, salt cellar, soda can, canned tuna) in the kitchen; also, a grocery bag should be accessible. Prepare/empty shelf space; label spots for the type of goods. Direction/Steps of activities:
| 2 |
Appendix B. Anchor Characteristics
| Beacon ID | Position | Parameters |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | (35, 37.5) | |
| 5 | (45, 37.5) | |
| 6 | (5, 12.5) | |
| 7 | (15, 12.5) | |
| 8 | (25, 12.5) | |
| 9 | (35, 12.5) | |
| 10 | (45, 12.5) |
Appendix C. Anchor Positions and Reference Positions

References
- Haghi, M.; Thurow, K.; Stoll, R. Wearable devices in medical internet of things: Scientific research and commercially available devices. Healthc. Inform. Res. 2017, 23, 4–15. [Google Scholar] [CrossRef] [PubMed]
- Pantelopoulos, A.; Bourbakis, N.G. A survey on wearable sensor-based systems for health monitoring and prognosis. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2009, 40, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Kleim, J.; Jones, T. Principles of experience-dependent neural plasticity: Implications for rehabilitation after brain damage. J. Speech Lang. Hear. Res. 2008, 51, S225–S239. [Google Scholar] [CrossRef]
- Chen, Y.; Duff, M.; Lehrer, N.; Sundaram, H.; He, J.; Wolf, S.L.; Rikakis, T. A computational framework for quantitative evaluation of movement during rehabilitation. In Proceedings of the AIP Conference Proceedings, Toyama, Japan, 11–13 October 2011; Volume 1371, pp. 317–326. [Google Scholar]
- Lang, C.E.; Bland, M.D.; Bailey, R.R.; Schaefer, S.Y.; Birkenmeier, R.L. Assessment of upper extremity impairment, function, and activity after stroke: Foundations for clinical decision making. J. Hand Ther. 2013, 26, 104–115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baran, M.; Lehrer, N.; Duff, M.; Venkataraman, V.; Turaga, P.; Ingalls, T.; Rymer, W.Z.; Wolf, S.L.; Rikakis, T. Interdisciplinary concepts for design and implementation of mixed reality interactive neurorehabilitation systems for stroke. Phys. Ther. 2015, 95, 449–460. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Y.; Xu, W.; Sundaram, H.; Rikakis, T.; Liu, S.M. Media adaptation framework in biofeedback system for stroke patient rehabilitation. In Proceedings of the 15th ACM international conference on Multimedia, Augsburg, Germany, 24–29 September 2007; pp. 47–57. [Google Scholar]
- Levin, M.F.; Kleim, J.A.; Wolf, S.L. What do motor “recovery” and “compensation” mean in patients following stroke? Neurorehabilit. Neural Repair 2009, 23, 313–319. [Google Scholar] [CrossRef]
- Slade, P.; Habib, A.; Hicks, J.L.; Delp, S.L. An Open-Source and Wearable System for Measuring 3D Human Motion in Real-Time. IEEE Trans. Biomed. Eng. 2022, 69, 678–688. [Google Scholar] [CrossRef] [PubMed]
- Choo, C.Z.Y.; Chow, J.Y.; Komar, J. Validation of the Perception Neuron system for full-body motion capture. PLoS ONE 2022, 17, e0262730. [Google Scholar] [CrossRef]
- Vega-Gonzalez, A.; Bain, B.J.; Dall, P.M.; Granat, M.H. Continuous monitoring of upper-limb activity in a free-living environment: A validation study. Med. Biol. Eng. Comput. 2007, 45, 947–956. [Google Scholar] [CrossRef]
- Ambar, R.B.; Poad, H.B.M.; Ali, A.M.B.M.; Ahmad, M.S.B.; Jamil, M.M.B.A. Multi-sensor arm rehabilitation monitoring device. In Proceedings of the 2012 International Conference on Biomedical Engineering (ICoBE), Penang, Malaysia, 27–28 February 2012; pp. 424–429. [Google Scholar]
- Stenum, J.; Cherry-Allen, K.M.; Pyles, C.O.; Reetzke, R.D.; Vignos, M.F.; Roemmich, R.T. Applications of pose estimation in human health and performance across the lifespan. Sensors 2021, 21, 7315. [Google Scholar] [CrossRef]
- Milosevic, B.; Leardini, A.; Farella, E. Kinect and wearable inertial sensors for motor rehabilitation programs at home: State of the art and an experimental comparison. BioMed. Eng. Online 2020, 19, 25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duff, M.; Attygalle, S.; He, J.; Rikakis, T. A portable, low-cost assessment device for reaching times. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 4150–4153. [Google Scholar]
- Uswatte, G.; Foo, W.L.; Olmstead, H.; Lopez, K.; Holand, A.; Simms, L.B. Ambulatory monitoring of arm movement using accelerometry: An objective measure of upper-extremity rehabilitation in persons with chronic stroke. Arch. Phys. Med. Rehabil. 2005, 86, 1498–1501. [Google Scholar] [CrossRef] [PubMed]
- Michielsen, M.E.; Selles, R.W.; Stam, H.J.; Ribbers, G.M.; Bussmann, J.B. Quantifying Nonuse in Chronic Stroke Patients: A Study Into Paretic, Nonparetic, and Bimanual Upper-Limb Use in Daily Life. Arch. Phys. Med. Rehabil. 2012, 93, 1975–1981. [Google Scholar] [CrossRef] [PubMed]
- Marschollek, M.; Becker, M.; Bauer, J.M.; Bente, P.; Dasenbrock, L.; Elbers, K.; Hein, A.; Kolb, G.; Künemund, H.; Lammel-Polchau, C.; et al. Multimodal activity monitoring for home rehabilitation of geriatric fracture patients–feasibility and acceptance of sensor systems in the GAL-NATARS study. Inform. Health Soc. Care 2014, 39, 262–271. [Google Scholar] [CrossRef] [PubMed]
- Lemmens, R.J.; Timmermans, A.A.; Janssen-Potten, Y.J.; Smeets, R.J.; Seelen, H.A. Valid and reliable instruments for arm-hand assessment at ICF activity level in persons with hemiplegia: A systematic review. BMC Neurol. 2012, 12, 21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bavan, L.; Surmacz, K.; Beard, D.; Mellon, S.; Rees, J. Adherence monitoring of rehabilitation exercise with inertial sensors: A clinical validation study. Gait Posture 2019, 70, 211–217. [Google Scholar] [CrossRef]
- De, D.; Bharti, P.; Das, S.K.; Chellappan, S. Multimodal wearable sensing for fine-grained activity recognition in healthcare. IEEE Internet Comput. 2015, 19, 26–35. [Google Scholar] [CrossRef]
- Rodrigues, M.J.; Postolache, O.; Cercas, F. Physiological and behavior monitoring systems for smart healthcare environments: A review. Sensors 2020, 20, 2186. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, H.; Zhang, Z.; Gao, N.; Xiao, Y.; Meng, Z.; Li, Z. Cost-Effective Wearable Indoor Localization and Motion Analysis via the Integration of UWB and IMU. Sensors 2020, 20, 344. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paul, A.S.; Wan, E.A. RSSI-Based Indoor Localization and Tracking Using Sigma-Point Kalman Smoothers. IEEE J. Sel. Top. Signal Process. 2009, 3, 860–873. [Google Scholar] [CrossRef]
- Zekavat, R.; Buehrer, R.M. Handbook of Position Location: Theory, Practice and Advances; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 27. [Google Scholar]
- Chen, H.; Zhang, Y.; Li, W.; Tao, X.; Zhang, P. ConFi: Convolutional Neural Networks Based Indoor Wi-Fi Localization Using Channel State Information. IEEE Access 2017, 5, 18066–18074. [Google Scholar] [CrossRef]
- Liu, C.; Fang, D.; Yang, Z.; Jiang, H.; Chen, X.; Wang, W.; Xing, T.; Cai, L. RSS Distribution-Based Passive Localization and Its Application in Sensor Networks. IEEE Trans. Wirel. Commun. 2016, 15, 2883–2895. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Proceedings IEEE INFOCOM 2000 Conference on Computer Communications Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, Y.; Nallanathan, A.; Wang, L. An Improved K-Nearest-Neighbor Indoor Localization Method Based on Spearman Distance. IEEE Signal Process. 2016, 23, 351–355. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Zhang, B.; Yao, Z.; Li, C. A feature scaling based k-nearest neighbor algorithm for indoor positioning system. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 436–441. [Google Scholar] [CrossRef]
- Xue, W.; Hua, X.; Li, Q.; Yu, K.; Qiu, W. Improved Neighboring Reference Points Selection Method for Wi-Fi Based Indoor Localization. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar] [CrossRef]
- Campos, R.S.; Lovisolo, L. A Fast Database Correlation Algorithm for Localization of Wireless Network Mobile Nodes using Coverage Prediction and Round Trip Delay. In Proceedings of the VTC Spring 2009—IEEE 69th Vehicular Technology Conference, Barcelona, Spain, 26–29 April 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Hata, M. Empirical formula for propagation loss in land mobile radio services. IEEE Trans. Veh. Technol. 1980, 29, 317–325. [Google Scholar] [CrossRef]
- Campos, R.S.; Lovisolo, L. Mobile station location using genetic algorithm optimized radio frequency fingerprinting. In Proceedings of the ITS, International Telecommunications Symposium, Tehran, Iran, 4 December 2010; Volume 1, pp. 1–5. [Google Scholar]
- Goldberg, D.E.; Holland, J.H. Genetic algorithms and machine learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Battiti, R.; Villani, R.; Nhat, T. Neural Network Models for Intelligent Networks: Deriving the Location from Signal Patterns. In Proceedings of the First Annual Symposium on Autonomous Intelligent Networks and Systems, Los Angeles, CA, USA, 4 June 2002. [Google Scholar]
- Xu, J.; Dai, H.; Ying, W.H. Multi-layer neural network for received signal strength-based indoor localisation. IET Commun. 2016, 10, 717–723. [Google Scholar] [CrossRef]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy, K. Recurrent Neural Networks for Accurate RSSI Indoor Localization. IEEE Internet Things J. 2019, 6, 10639–10651. [Google Scholar] [CrossRef] [Green Version]
- Assayag, Y.; Oliveira, H.; Souto, E.; Barreto, R.; Pazzi, R. Indoor positioning system using dynamic model estimation. Sensors 2020, 20, 7003. [Google Scholar] [CrossRef]
- Lu, C.; Uchiyama, H.; Thomas, D.; Shimada, A.; Taniguchi, R.I. Indoor positioning system based on chest-mounted IMU. Sensors 2019, 19, 420. [Google Scholar] [CrossRef] [Green Version]
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative indoor positioning systems: A systematic review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef] [PubMed]
- De Blasio, G.; Quesada-Arencibia, A.; García, C.R.; Molina-Gil, J.M.; Caballero-Gil, C. Study on an indoor positioning system for harsh environments based on Wi-Fi and Bluetooth low energy. Sensors 2017, 17, 1299. [Google Scholar] [CrossRef] [PubMed]
- López-Pastor, J.A.; Ruiz-Ruiz, A.J.; García-Sánchez, A.J.; Gómez-Tornero, J.L. An Automatized Contextual Marketing System Based on a Wi-Fi Indoor Positioning System. Sensors 2021, 21, 3495. [Google Scholar] [CrossRef] [PubMed]
- Yin, F.; Zhao, Y.; Gunnarsson, F. Proximity report triggering threshold optimization for network-based indoor positioning. In Proceedings of the 2015 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; pp. 1061–1069. [Google Scholar]
- Yin, F.; Zhao, Y.; Gunnarsson, F.; Gustafsson, F. Received-Signal-Strength Threshold Optimization Using Gaussian Processes. IEEE Trans. Signal Process. 2017, 65, 2164–2177. [Google Scholar] [CrossRef] [Green Version]
- Bergman, N. Recursive Bayesian Estimation. Ph.D. Thesis, Department of Electrical Engineering, Linköping University, Linköping Studies in Science and Technology, Linköping, Sweden, 1999. Volume 579. [Google Scholar]
- Patwari, N.; Hero III, A.O. Using proximity and quantized RSS for sensor localization in wireless networks. In Proceedings of the 2nd ACM International Conference on Wireless Sensor Networks and Applications, San Diego, CA, USA, 19 September 2003; pp. 20–29. [Google Scholar]
- Pons-Moll, G.; Baak, A.; Helten, T.; Müller, M.; Seidel, H.P.; Rosenhahn, B. Multisensor-fusion for 3D full-body human motion capture. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 663–670. [Google Scholar]
- Pons-Moll, G.; Baak, A.; Gall, J.; Leal-Taixe, L.; Mueller, M.; Seidel, H.P.; Rosenhahn, B. Outdoor human motion capture using inverse kinematics and Von Mises-Fisher sampling. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 1243–1250. [Google Scholar]
- Malleson, C.; Gilbert, A.; Trumble, M.; Collomosse, J.; Hilton, A.; Volino, M. Real-time full-body motion capture from video and IMUs. In Proceedings of the 2017 International Conference on 3D Vision (3DV), Qingdao, China, 10–12 October 2017; pp. 449–457. [Google Scholar]
- von Marcard, T.; Henschel, R.; Black, M.J.; Rosenhahn, B.; Pons-Moll, G. Recovering accurate 3D human pose in the wild using IMUs and a moving camera. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 601–617. [Google Scholar]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime multi-person 2D pose estimation using Part Affinity Fields. arXiv 2018, arXiv:1812.08008. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Helten, T.; Muller, M.; Seidel, H.P.; Theobalt, C. Real-time body tracking with one depth camera and inertial sensors. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1105–1112. [Google Scholar]
- Andrews, S.; Huerta, I.; Komura, T.; Sigal, L.; Mitchell, K. Real-time physics-based motion capture with sparse sensors. In Proceedings of the 13th European Conference on Visual Media Production (CVMP 2016), London, UK, 12–13 December 2016; pp. 1–10. [Google Scholar]
- Colella, R.; Tumolo, M.R.; Sabina, S.; Leo, C.G.; Mincarone, P.; Guarino, R.; Catarinucci, L. Design of UHF RFID Sensor-Tags for the Biomechanical Analysis of Human Body Movements. IEEE Sens. J. 2021, 21, 14090–14098. [Google Scholar] [CrossRef]
- Schwarz, L.A.; Mateus, D.; Navab, N. Discriminative human full-body pose estimation from wearable inertial sensor data. In 3D Physiological Human Workshop; Springer: Berlin/Heidelberg, Germany, 2009; pp. 159–172. [Google Scholar]
- Wouda, F.J.; Giuberti, M.; Bellusci, G.; Veltink, P.H. Estimation of full-body poses using only five inertial sensors: An eager or lazy learning approach? Sensors 2016, 16, 2138. [Google Scholar] [CrossRef]
- von Marcard, T.; Rosenhahn, B.; Black, M.J.; Pons-Moll, G. Sparse inertial poser: Automatic 3D human pose estimation from sparse IMUs. Comput. Graph. Forum 2017, 36, 349–360. [Google Scholar] [CrossRef]
- Huang, Y.; Kaufmann, M.; Aksan, E.; Black, M.J.; Hilliges, O.; Pons-Moll, G. Deep inertial poser: Learning to reconstruct human pose from sparse inertial measurements in real time. ACM Trans. Graph. (TOG) 2018, 37, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Geissinger, J.; Asbeck, A. Motion Inference Using Sparse Inertial Sensors, Self-Supervised Learning, and a New Dataset of Unscripted Human Motion. Sensors 2020, 20, 6330. [Google Scholar] [CrossRef] [PubMed]
- Yi, X.; Zhou, Y.; Xu, F. TransPose: Real-time 3D Human Translation and Pose Estimation with Six Inertial Sensors. arXiv 2021, arXiv:2105.04605. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Mahmood, N.; Ghorbani, N.; Troje, N.F.; Pons-Moll, G.; Black, M.J. AMASS: Archive of motion capture as surface shapes. arXiv 2019, arXiv:1904.03278. [Google Scholar]
- Trumble, M.; Gilbert, A.; Malleson, C.; Hilton, A.; Collomosse, J. Total Capture: 3D Human Pose Estimation Fusing Video and Inertial Sensors. In Proceedings of the British Machine Vision Conference, BMVC 2017, London, UK, 4–7 September 2017; Volume 2, p. 3. [Google Scholar]
- Schepers, M.; Giuberti, M.; Bellusci, G. XSens MVN: Consistent Tracking of Human Motion Using Inertial Sensing; Xsens Technologies: Enskode, The Netherlands, 2018; pp. 1–8. [Google Scholar]
- Roetenberg, D.; Luinge, H.; Slycke, P. XSens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors; Tech. Rep.; Xsens Motion Technologies BV: Enschede, The Netherlands, 2009; Volume 1. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Gay, W. Raspberry Pi Hardware Reference; Apress: New York, NY, USA, 2014. [Google Scholar]
- Zhao, Y.; Fritsche, C.; Yin, F.; Gunnarsson, F.; Gustafsson, F. Sequential Monte Carlo Methods and Theoretical Bounds for Proximity Report Based Indoor Positioning. IEEE Trans. Veh. Technol. 2018, 67, 5372–5386. [Google Scholar] [CrossRef]
- Geissinger, J.; Alemi, M.M.; Chang, S.E.; Asbeck, A.T. Virginia Tech Natural Motion Dataset [Data Set]; University Libraries, Virginia Tech: Blacksburg, VA, USA, 2020. [Google Scholar] [CrossRef]
- Roetenberg, D.; Luinge, H.; Veltink, P. Inertial and magnetic sensing of human movement near ferromagnetic materials. In Proceedings of the Second IEEE and ACM International Symposium on Mixed and Augmented Reality, Tokyo, Japan, 10 October 2003; pp. 268–269. [Google Scholar]
- Roetenberg, D.; Luinge, H.J.; Baten, C.T.; Veltink, P.H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 395–405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, S.; Nussbaum, M.A. Performance evaluation of a wearable inertial motion capture system for capturing physical exposures during manual material handling tasks. Ergonomics 2013, 56, 314–326. [Google Scholar] [CrossRef] [PubMed]
- Al-Amri, M.; Nicholas, K.; Button, K.; Sparkes, V.; Sheeran, L.; Davies, J.L. Inertial measurement units for clinical movement analysis: Reliability and concurrent validity. Sensors 2018, 18, 719. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grassia, F.S. Practical parameterization of rotations using the exponential map. J. Graph. Tools 1998, 3, 29–48. [Google Scholar] [CrossRef]
- Fragkiadaki, K.; Levine, S.; Felsen, P.; Malik, J. Recurrent network models for human dynamics. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 4346–4354. [Google Scholar]
- Jain, A.; Zamir, A.R.; Savarese, S.; Saxena, A. Structural-RNN: Deep Learning on spatio-temporal graphs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 5308–5317. [Google Scholar]
- Martinez, J.; Black, M.J.; Romero, J. On human motion prediction using recurrent neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2891–2900. [Google Scholar]
- Taylor, G.W.; Hinton, G.E.; Roweis, S.T. Modeling human motion using binary latent variables. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 3–6 December 2007; pp. 1345–1352. [Google Scholar]
- Ionescu, C.; Papava, D.; Olaru, V.; Sminchisescu, C. Human3.6M: Large scale datasets and predictive methods for 3D human sensing in natural environments. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1325–1339. [Google Scholar]
- Pavllo, D.; Grangier, D.; Auli, M. Quaternet: A quaternion-based recurrent model for human motion. arXiv 2018, arXiv:1805.06485. [Google Scholar]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, USA, 8–13 December 2014; pp. 3104–3112. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Schuster, M.; Paliwal, K.K. Bidirectional recurrent neural networks. IEEE Trans. Signal Process. 1997, 45, 2673–2681. [Google Scholar] [CrossRef] [Green Version]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural machine translation by jointly learning to align and translate. arXiv 2014, arXiv:1409.0473. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5998–6008. [Google Scholar]
- Radford, A.; Narasimhan, K.; Salimans, T.; Sutskever, I. Improving Language Understanding by Generative Pre-Training. 2018. Available online: https://s3-us-west-2.amazonaws.com/openai-assets/research-covers/language-unsupervised/language_understanding_paper.pdf (accessed on 25 April 2020).
- Devlin, J.; Chang, M.W.; Lee, K.; Toutanova, K. BERT: Pre-training of deep bidirectional transformers for language understanding. arXiv 2018, arXiv:1810.04805. [Google Scholar]
- Radford, A.; Wu, J.; Child, R.; Luan, D.; Amodei, D.; Sutskever, I. Language models are unsupervised multitask learners. OpenAI Blog 2019, 1, 9. [Google Scholar]
- Raffel, C.; Shazeer, N.; Roberts, A.; Lee, K.; Narang, S.; Matena, M.; Zhou, Y.; Li, W.; Liu, P.J. Exploring the limits of transfer learning with a unified text-to-text transformer. arXiv 2019, arXiv:1910.10683. [Google Scholar]
- Brown, T.B.; Mann, B.; Ryder, N.; Subbiah, M.; Kaplan, J.; Dhariwal, P.; Neelakantan, A.; Shyam, P.; Sastry, G.; Askell, A.; et al. Language models are few-shot learners. arXiv 2020, arXiv:2005.14165. [Google Scholar]
- Rush, A.M. The annotated transformer. In Proceedings of the Workshop for NLP Open Source Software (NLP-OSS), Melbourne, Australia, 20 July 2018; pp. 52–60. [Google Scholar]
- Alammar, J. The Illustrated Transformer. 2018. Available online: http://jalammar.github.io/illustrated-transformer (accessed on 25 April 2020).
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An imperative style, high-performance deep learning library. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 8–14 December 2019; pp. 8024–8035. [Google Scholar]
- Markley, L.; Cheng, Y.; Crassidis, J.; Oshman, Y. Averaging Quaternions. J. Guid. Control Dyn. 2007, 30, 1193–1196. [Google Scholar] [CrossRef]
- Yin, K.; Pai, D.K. Footsee: An interactive animation system. In Proceedings of the 2003 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, San Diego, CA, USA, 26–27 July 2003; pp. 329–338. [Google Scholar]
- Fang, S.H.; Lin, T.N. Indoor location system based on discriminant-adaptive neural network in IEEE 802.11 environments. IEEE Trans. Neural Netw. 2008, 19, 1973–1978. [Google Scholar] [CrossRef] [PubMed]
- Loper, M.; Mahmood, N.; Romero, J.; Pons-Moll, G.; Black, M.J. SMPL: A skinned multi-person linear model. ACM Trans. Graph. (TOG) 2015, 34, 248. [Google Scholar] [CrossRef]

























| Parameter | Value |
|---|---|
| Learning Rate, | |
| Iterations (epochs) | 400 |
| Batch size, | 500 |
| Training Shadowing variance, |
| Parameters | Deep Learning Models | |||
|---|---|---|---|---|
| Seq2Seq | Seq2Seq (BiRNN, Attn.) | Transformer Encoder | Transformer Full | |
| Batch Size | 32 | 32 | 32 | 32 |
| Sequence Length | 30 | 30 | 30 | 30 |
| Downsample | 6 | 6 | 6 | 6 |
| In-out-ratio | 1 | 1 | 1 | 1 |
| Stride | 30 | 30 | 30 | 30 |
| Hidden-Size | 512 | 512 | N/A | N/A |
| Number of Epochs | 3 | 3 | 3 | 3 |
| Dropout | ||||
| Number of Heads | N/A | N/A | 21 | 4 |
| Number of Layers | N/A | N/A | 2 | 4 |
| Feedforward Size | N/A | N/A | 200 | 2048 |
| Deep Learning Model | Fixed Mapping, Configuration 1 | Fixed Mapping, Configuration 2 |
|---|---|---|
| Seq2Seq | ° | ° |
| Seq2Seq (BiRNN, Attn) | ° | ° |
| Transformer Enc. | ° | ° |
| Transformer Full | ° | ° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarker, A.; Emenonye, D.-R.; Kelliher, A.; Rikakis, T.; Buehrer, R.M.; Asbeck, A.T. Capturing Upper Body Kinematics and Localization with Low-Cost Sensors for Rehabilitation Applications. Sensors 2022, 22, 2300. https://doi.org/10.3390/s22062300
Sarker A, Emenonye D-R, Kelliher A, Rikakis T, Buehrer RM, Asbeck AT. Capturing Upper Body Kinematics and Localization with Low-Cost Sensors for Rehabilitation Applications. Sensors. 2022; 22(6):2300. https://doi.org/10.3390/s22062300
Chicago/Turabian StyleSarker, Anik, Don-Roberts Emenonye, Aisling Kelliher, Thanassis Rikakis, R. Michael Buehrer, and Alan T. Asbeck. 2022. "Capturing Upper Body Kinematics and Localization with Low-Cost Sensors for Rehabilitation Applications" Sensors 22, no. 6: 2300. https://doi.org/10.3390/s22062300
APA StyleSarker, A., Emenonye, D. -R., Kelliher, A., Rikakis, T., Buehrer, R. M., & Asbeck, A. T. (2022). Capturing Upper Body Kinematics and Localization with Low-Cost Sensors for Rehabilitation Applications. Sensors, 22(6), 2300. https://doi.org/10.3390/s22062300