
On Mechanical and Electrical Coupling Determination at Piezoelectric Harvester by Customized Algorithm Modeling and Measurable Properties


Abstract
:1. Introduction
2. Materials and Methods
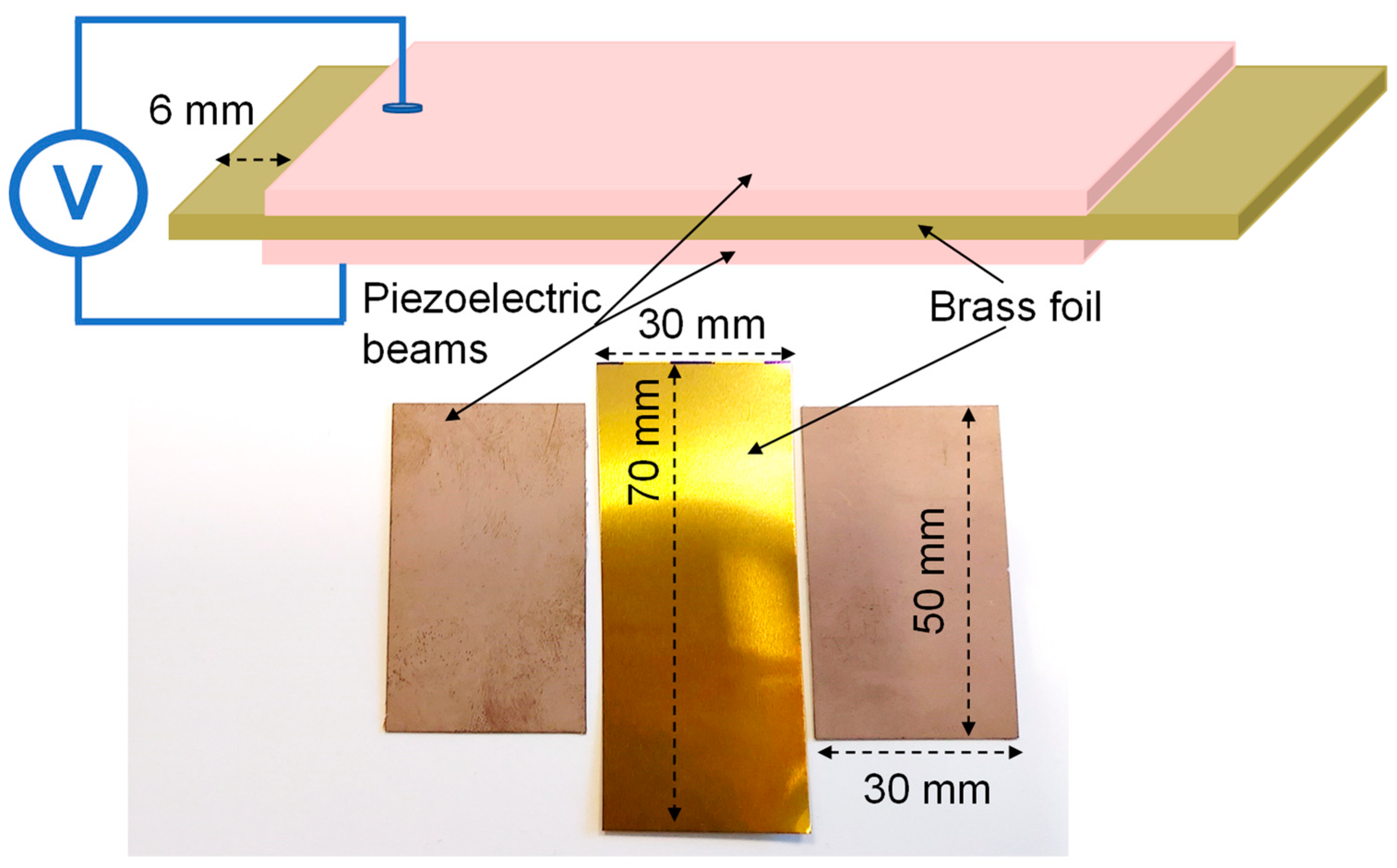
2.1. Harvester Design and Preparation
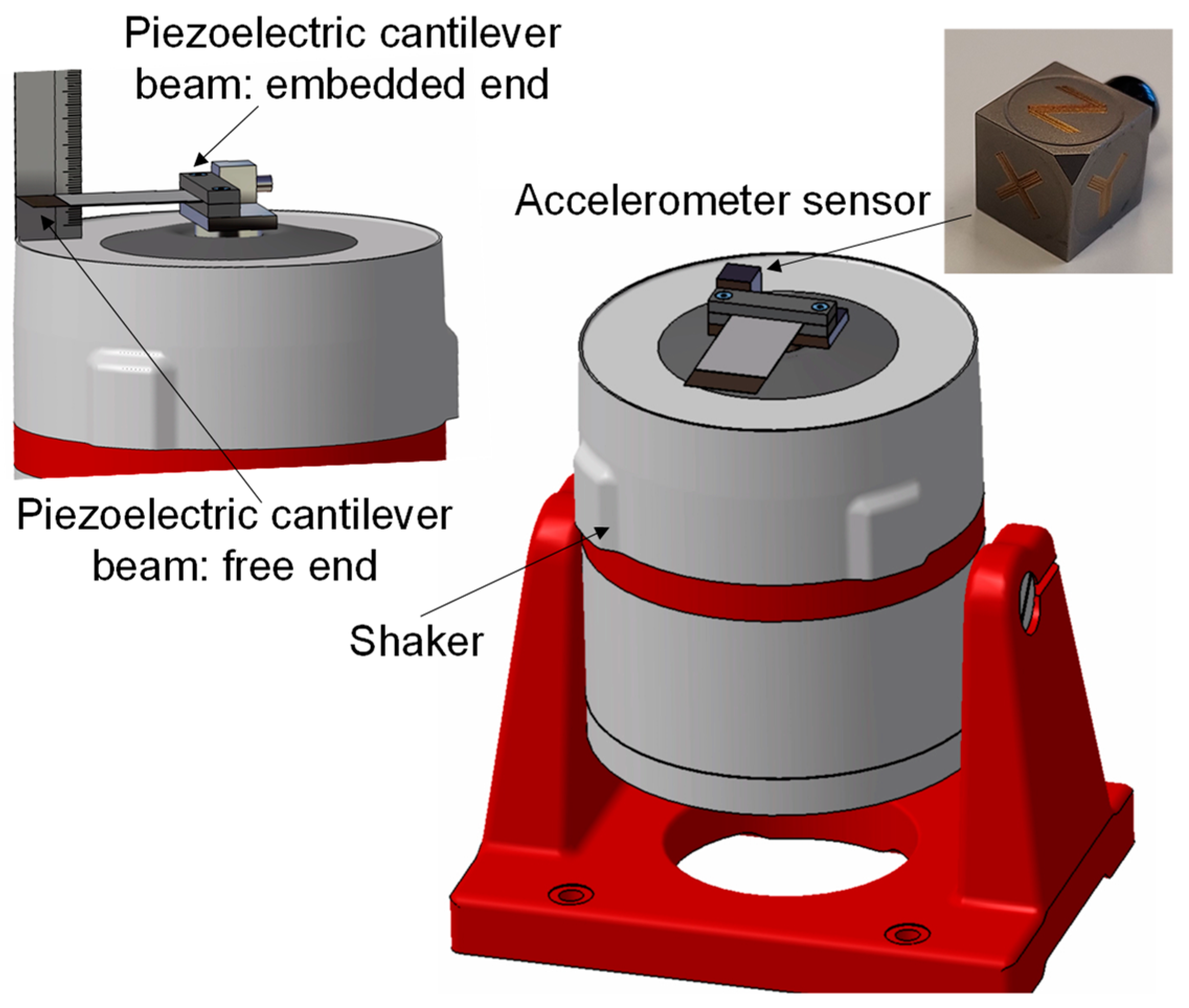
2.2. Experimental Setup
3. Model and Equivalences Proposition
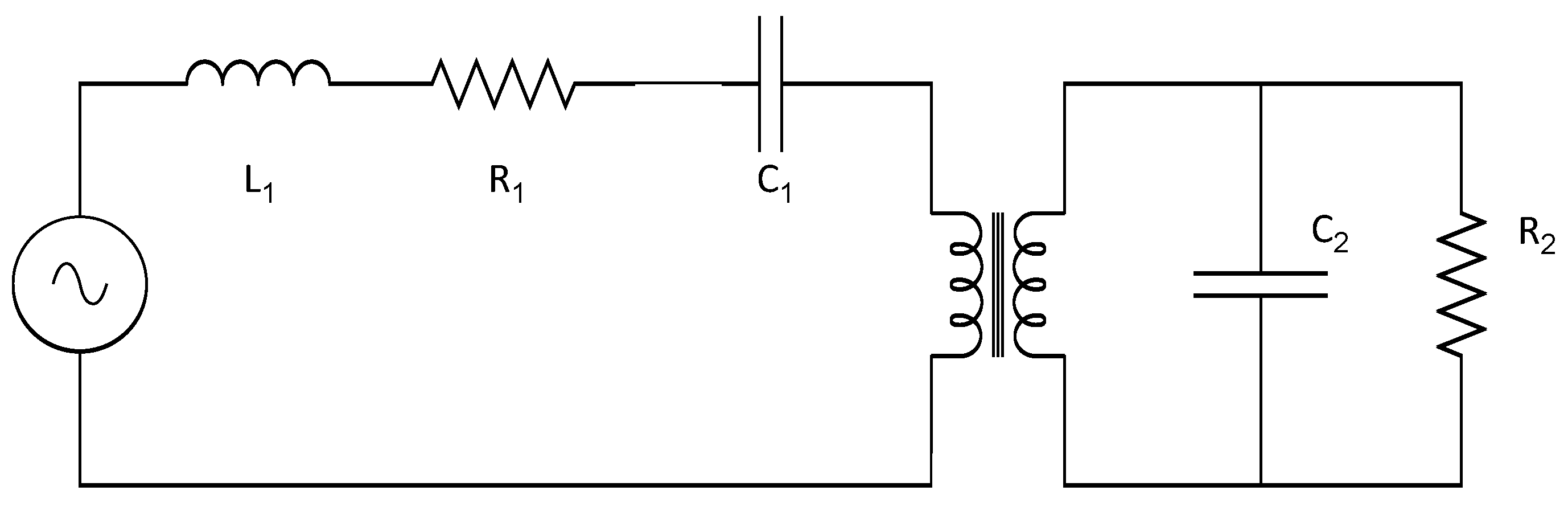
3.1. Harvester Model Approach
3.2. Equivalences between the Electrical and the Mechanical Circuits
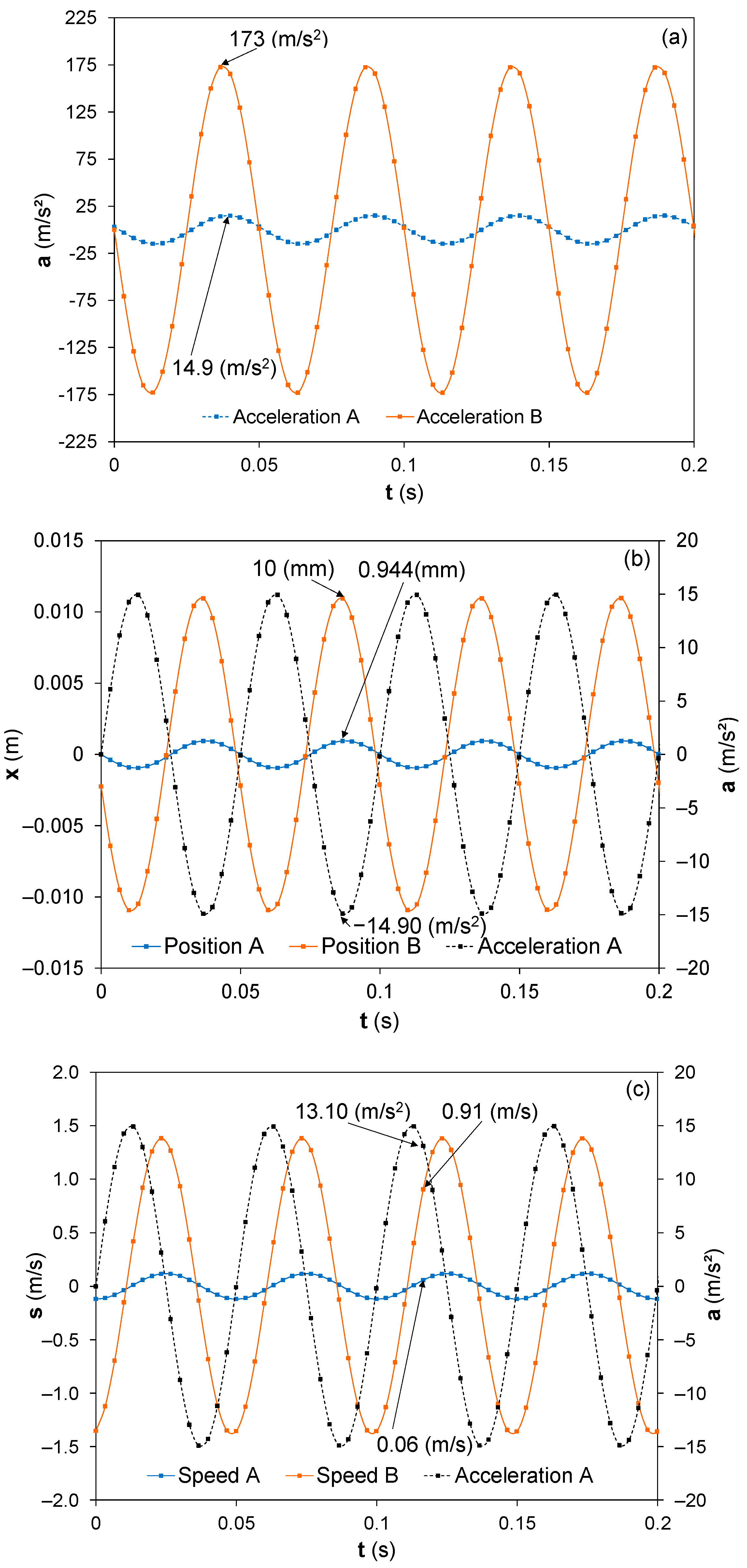
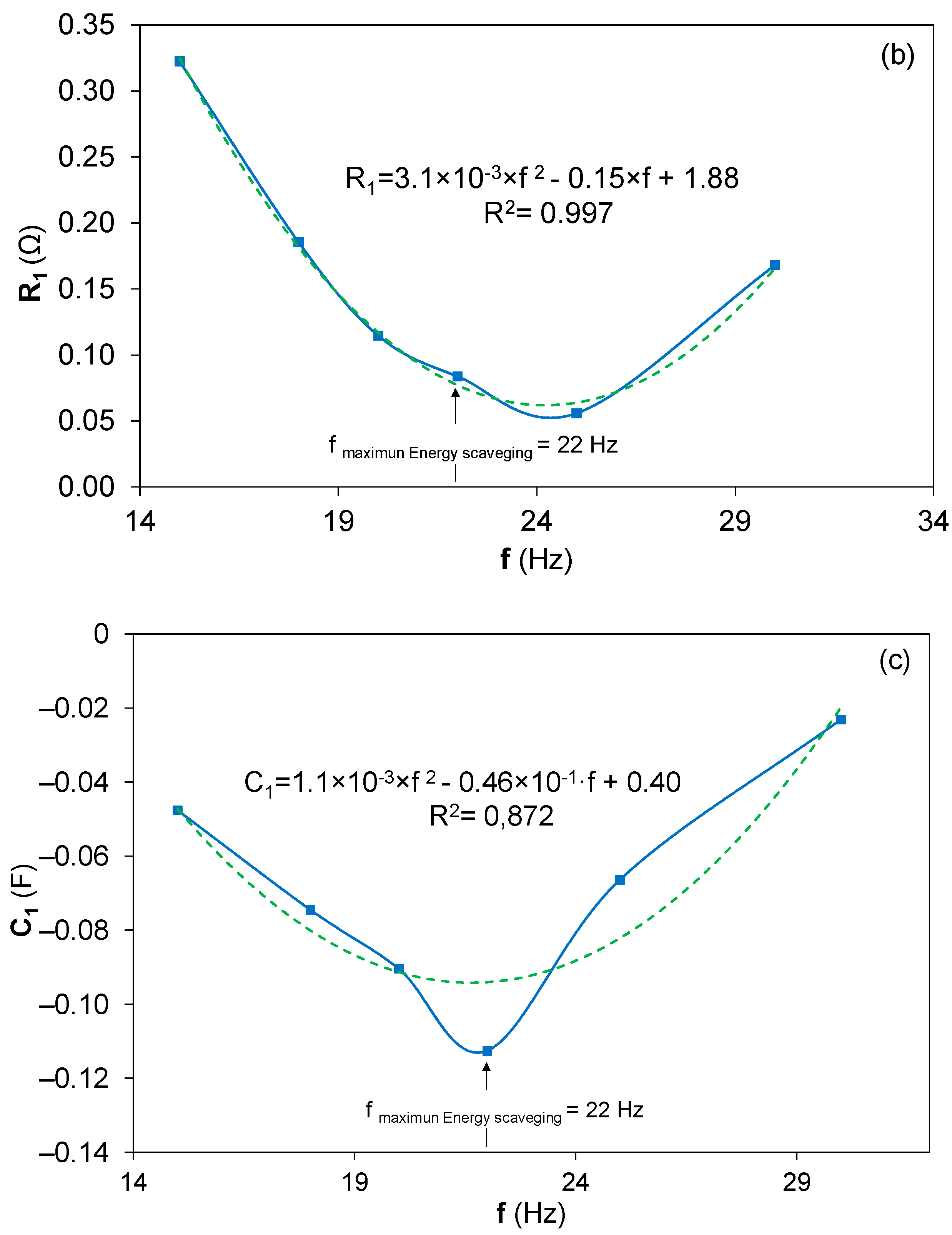
- Stiffness—Stiffness (electrically equivalent to C1) was defined as the ratio between the force applied on a system and the displacement it causes. Therefore, the stiffness coefficient could be determined by dividing the applied force on the piezoelectric beam by the difference between the displacement of the free end, , and the displacement of the fixed one, .
- 2
- Damping—The damping coefficient (electrically equivalent to R1) was defined as the ratio between the applied force on a system and the speed it acquires. The experimental determination of the damping coefficient of the piezoelectric bimorph harvester at its fixed end was calculated using the integral of the acceleration measured by the accelerometer sensor, . The speed of the free end,, was obtained from the function determined by the high-speed camera measurements and its subsequent derivation.
- 3
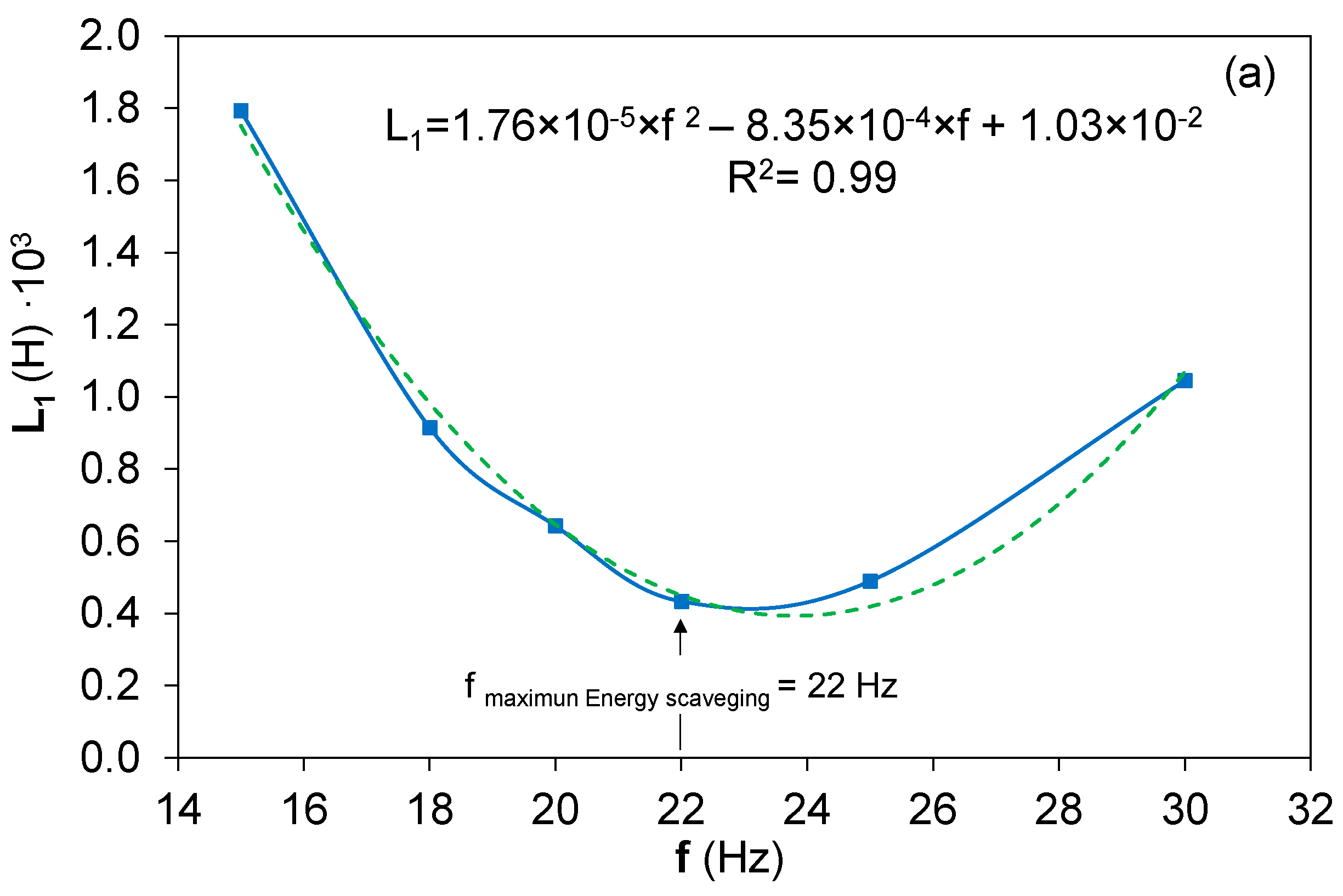
- Inertia—The inertia that governs the behavior of the PZT bimorph harvester was analyzed for the electrical equivalence, the inductance, to determine the mechanical properties that could be experimentally measured as the input for the model. The electrical behavior of an inductance is governed ideally by the following equation [35]:
- 4
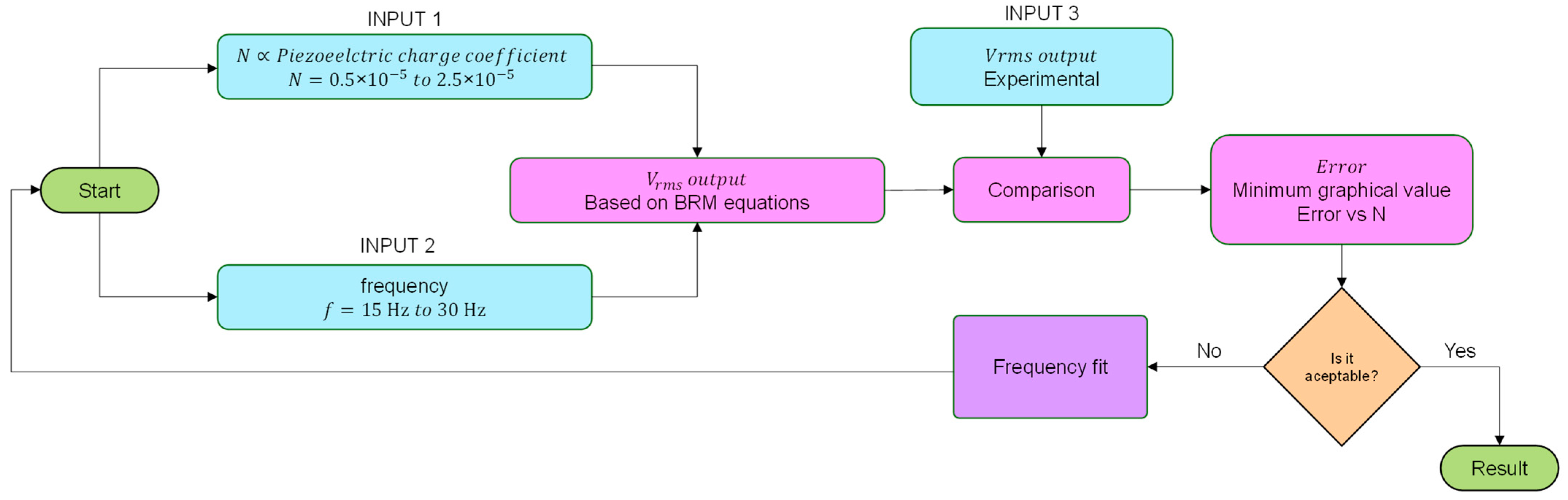
- The piezoelectric charge constant, usually named d, is the link between the mechanical strain produced by the applied electrical field when the piezoelectric material acts as an actuator. Conversely, this coefficient may be assigned to the resulting electrical charges collected by the harvester electrodes when mechanical stress is applied. The piezoelectric charge coefficient directions depend on the direction of the applied force and the polarization of the piezoelectric layer, . In the present model, the equivalence between the piezoelectric charge constant, mechanical property, and their electrical equivalence in the Butterworth Van Dyke model is named N, as defined in Table 1. This coefficient, N, connects and governs the electrical or mechanical forces of the bimorph piezoelectric harvester. The dimensional units of the piezoelectric coefficient are which could be expressed as . The dimensional equivalence in the mechanical circuit is . This coefficient is characteristic of piezoelectric generators, but it is not a property of a conventional electrical transformer. The conventional transformer acts by reducing or increasing the electrical voltage between both networks at the Butterworth Van Dyke equivalent circuits, while the piezoelectric generator acts by linking the electrical voltage of one equivalent circuit with the integral of the current intensity by the differential of the time. The dimensional equivalences are shown in Table 3.
3.3. Behavior Real Model Based on State of Space Equations
4. Results
5. Discussion
5.1. Electrical Characteristic Parameter from BRM
5.2. Custom Iterative Algorithm for N Calculation
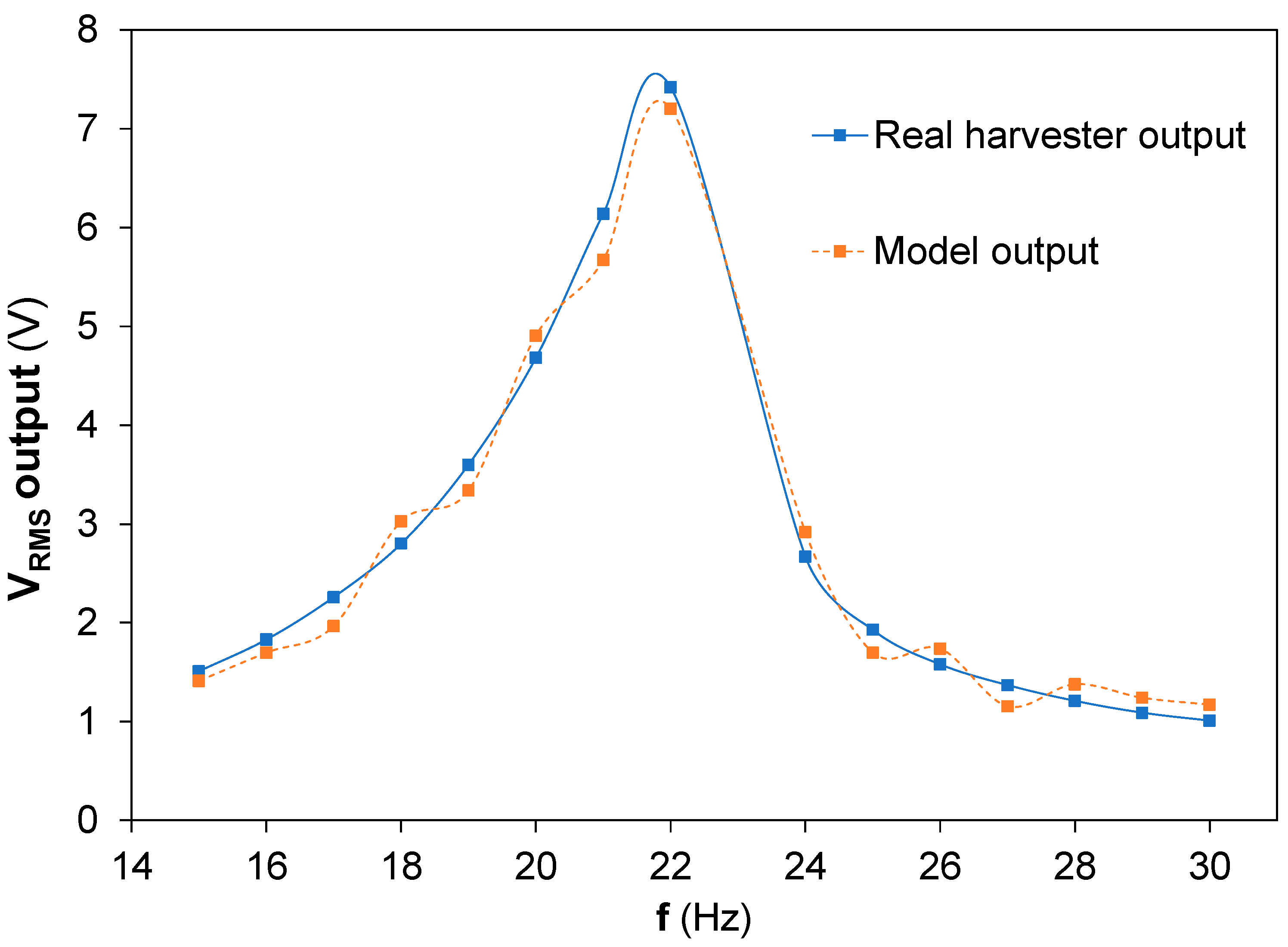
5.3. Vrms Outpout, Experimental and Theoretical Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Batteries Waste Environment European Commission. Available online: https://ec.europa.eu/environment/waste/batteries/ (accessed on 3 November 2020).
- Bassi, L. Industry 4.0: Hope, hype or revolution? In Proceedings of the 2017 IEEE 3rd International Forum on Research and Technologies for Society and Industry (RTSI), Modena, Italy, 11–13 September 2017. [Google Scholar]
- Perez-Alfaro, I.; Gil-Hernandez, D.; Muñoz-Navascues, O.; Casbas-Gimenez, J.; Sanchez-Catalan, J.C.; Murillo, N. Low-Cost Piezoelectric Sensors for Time Domain Load Monitoring of Metallic Structures During Operational and Maintenance Processes. Sensors 2020, 20, 1471. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elvin, N.G.; Elvin, A.A. Vibrational Energy Harvesting From Human Gait. IEEEASME Trans. Mechatron. 2013, 18, 637–644. [Google Scholar] [CrossRef]
- Kishore, R.A.; Priya, S.A. Review on Low-Grade Thermal Energy Harvesting: Materials, Methods and Devices. Materials 2018, 11, 1433. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sung, G.-M.; Chung, C.-K.; Lai, Y.-J.; Syu, J.-Y. Small-Area Radiofrequency-Energy-Harvesting Integrated Circuits for Powering Wireless Sensor Networks. Sensors 2019, 19, 1754. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.S.; Kim, J.-H.; Kim, J. A review of piezoelectric energy harvesting based on vibration. Int. J. Precis. Eng. Manuf. 2011, 16, 1129–1141. [Google Scholar] [CrossRef]
- Madruga, S.; Mendoza, C. Introducing a new concept for enhanced micro-energy harvesting of thermal fluctuations through the Marangoni effect. Appl. Energy 2022, 306, 117966. [Google Scholar] [CrossRef]
- Chaari, M.Z.; Lahiani, M.; Ghariani, H. Energy harvesting from electromagnetic radiation emissions by compact fluorescent lamp. In Proceedings of the 2017 Ninth International Conference on Advanced Computational Intelligence (ICACI), Doha, Qatar, 4–6 February 2017; pp. 272–275. [Google Scholar]
- Long, Y.; He, P.; Shao, Z.; Li, Z.; Kim, H.; Yao, A.M.; Peng, Y.; Xu, R.; Ahn, C.H.; Lee, S.-W.; et al. Moisture-induced autonomous surface potential oscillations for energy harvesting. Nat. Commun. 2021, 12, 1–10. [Google Scholar] [CrossRef]
- Shirvanimoghaddam, M.; Shirvanimoghaddam, K.; Abolhasani, M.M.; Farhangi, M.; Barsari, V.Z.; Liu, H.; Dohler, M.; Naebe, M. Paving the Path to a Green and Self-Powered Internet of Things. arXiv 2017, arXiv:1712.02277. [Google Scholar]
- Anton, S.R.; Sodano, H.A. A review of power harvesting using piezoelectric materials (2003–2006). Smart Mater. Struct. 2007, 16, R1. [Google Scholar] [CrossRef]
- Lu, Q.; Liu, L.; Scarpa, F.; Leng, J.; Liu, Y. A novel composite multi-layer piezoelectric energy harvester. Compos. Struct. 2018, 201, 121–130. [Google Scholar] [CrossRef]
- Zhu, D.; Almusallam, A.; Beeby, S.; Tudor, J.; Harris, N. A Bimorph Multi-layer Piezoelectric Vibration Energy Harvester. In Proceedings of the 10th International Workshop on Micro and Nanotechnology for Power Generation and Energy Conversion Applications, Leuven, Belgium, 30 November–3 December2010. [Google Scholar]
- Naval, S.; Sinha, P.K.; Das, N.K.; Anand, A.K. Bandwidth Increment of Piezoelectric Energy Harvester using Multi-beam Structure. In Proceedings of the 2019 Devices for Integrated Circuit (DevIC), Kalyani, India, 23–24 March 2019; pp. 370–373. [Google Scholar]
- Zhu, D.; Beeby, S.; Tudor, J.; White, N.; Harris, N. Improving Output Power of Piezoelectric Energy Harvesters using Multilayer Structures. Procedia Eng. 2011, 25, 199–202. [Google Scholar] [CrossRef] [Green Version]
- Roundy, S.; Wright, P.K. A piezoelectric vibration based generator for wireless electronics. Smart Mater. Struct. 2004, 13, 1131–1142. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Yong, X. Energy harvesting characteristics of a cantilever piezoelectric transducer. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), Xianning, China, 16–18 April 2011; pp. 2183–2186. [Google Scholar]
- Keawboonchuay, C.; Engel, T.G. Maximum power generation in a piezoelectric pulse generator. IEEE Trans. Plasma Sci. 2003, 31, 123–128. [Google Scholar] [CrossRef]
- Sriramdas, R.; Pratap, R. An Experimentally Validated Lumped Circuit Model for Piezoelectric and Electrodynamic Hybrid Harvesters. IEEE Sens. J. 2018, 18, 2377–2384. [Google Scholar] [CrossRef]
- Wu, Y.-C.; Halvorsen, E.; Lallart, M.; Richard, C.; Guyomar, D. Stochastic Modeling in the Frequency Domain for Energy Harvester With Switching Electronic Interface. IEEEASME Trans. Mechatron. 2015, 20, 50–60. [Google Scholar] [CrossRef]
- Ali, W.G.; Ibrahim, S.W.; Telba, A. Modeling and simulation of volture piezoelectric energy harvester. In Proceedings of the 2012 Seventh International Conference on Computer Engineering Systems (ICCES), Cairo, Egypt, 27–29 November 2012; pp. 221–226. [Google Scholar]
- Singh, K.A.; Kumar, R.; Weber, R.J. A Broadband Bistable Piezoelectric Energy Harvester With Nonlinear High-Power Extraction. IEEE Trans. Power Electron. 2015, 30, 6763–6774. [Google Scholar] [CrossRef]
- Rincón-Mora, G.A.; Yang, S. Tiny Piezoelectric Harvesters: Principles, Constraints, and Power Conversion. IEEE Trans. Circuits Syst. Regul. Pap. 2016, 63, 639–649. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, L. Equivalent Circuit Modeling of Piezoelectric Energy Harvesters. J. Intell. Mater. Syst. Struct. 2009, 20, 2223–2235. [Google Scholar] [CrossRef]
- Kasyap, A.; Phipps, A.; Nishida, T.; Sheplak, M.; Cattafesta, L. Development of MEMS-based Piezoelectric Vibration Energy Harvesters. Struct. Dyn. Renew. Energy 2011, 1, 77–84. [Google Scholar]
- Rosenbaum, J.F. Bulk Acoustic Wave Theory and Devices; Artech House: London, UK; Norwood, MA, USA, 1988. [Google Scholar]
- Kim, J.; Varadan, V.V.; Varadan, V.K.; Bao, X.-Q. Finite-element modeling of a smart cantilever plate and comparison with experiments. Smart Mater. Struct. 1996, 5, 165–170. [Google Scholar] [CrossRef]
- Sun, C.; Shang, G.; Zhu, X.; Tao, Y.; Li, Z. Modeling for Piezoelectric Stacks in Series and Parallel. In Proceedings of the 2013 Third international conference on intelligent system design and engineering applications, Washington, DC, USA, 16–18 January 2013; pp. 954–957. [Google Scholar]
- Camarinha-Matos, L.M.; Barrento, N.S.; Mendonça, R. Technological Innovation for Collective Awareness Systems. In Proceedings of the 5th IFIP WG 5.5/SOCOLNET Doctoral Conference on Computing, Electrical and Industrial Systems, DoCEIS 2014, Costa de Caparica, Portugal, 7–9 April 2014. [Google Scholar]
- Liang, J.; Liao, W. Impedance analysis for piezoelectric energy harvesting devices under displacement and force excitations. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010. [Google Scholar]
- Timoshenko, S.; Goodier, J.N. (Eds.) Theory of Elasticity, 2nd ed.; McGraw-Hill Book Company: New York, NY, USA, 1951. [Google Scholar]
- Irwin, J.D.; Graf, E.R. Industrial Noise and Vibration Control; Prentice-Hall: Hoboken, NJ, USA, 1979. [Google Scholar]
- Edminister, J.A. Electric Circuits; McGraw-Hill Book Company: New York, NY, USA, 2020. [Google Scholar]
- Dekkers, M.; Boschker, H.; Van Zalk, M.; Nguyen, M.; Nazeer, H.; Houwman, E.; Rijnders, G. The significance of the piezoelectric coefficient d31,eff determined from cantilever structures. J. Micromech. Microeng. 2012, 23, 025008. [Google Scholar] [CrossRef] [Green Version]
- Przybylski, J.; Gasiorski, G. Nonlinear vibrations of elastic beam with piezoelectric actuators. J. Sound Vib. 2018, 437, 150–165. [Google Scholar] [CrossRef]
- Pérez, R.; Albareda, A.; García, J.E.; Casals, J.A. Relación entre los comportamientos no lineales dieléctrico y mecánico en cerámicas piezoeléctricas. Bol. Soc. Esp. Ceram. V. 2004, 43, 658–662. [Google Scholar] [CrossRef]
- Homayouni-Amlashi, A.; Mohand-Ousaid, A.; Rakotondrabe, M. Analytical modelling and optimization of a piezoelectric cantilever energy harvester with in-span attachment. Micromachines 2020, 11, 591. [Google Scholar] [CrossRef] [PubMed]
- Amerian Piezo Ceramics Inc. Piezoelectric Ceramics: Principles and Applications; APC International: Mackeyville, PA, USA, 2011. [Google Scholar]
- Jung, H.J.; Jabbar, H.; Song, Y.; Sung, T.H. Hybrid-type (d33 and d31) impact-based piezoelectric hydroelectric energy harvester for watt-level electrical devices. Sens. Actuators Phys. 2016, 245, 40–48. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrical Equivalent Elements | Real Measurable Properties |
|---|---|
| Electrical work (V) | Applied mechanical excitation force modulus |
| Inductance, L1 | Inertia |
| Resistance, R1 | Damping |
| Capacitance, C1 | 1/Stiffness |
| N | Piezoelectric charge constant |
| C2 | Electrical equivalent output capacitor |
| R2 | Electrical equivalent output resistance |
| Mechanical Parameters | Electrical Parameters |
|---|---|
| Mechanical force | Electrical force |
| N | V |
| Damping | Electrical resistance |
| Stiffness | Inverse of the capacity |
| Primary circuit source → Integral of the current in the secondary circuit |
| Secondary circuit source → Integral of the current in the primary circuit |
| f (Hz) | ||||||||
|---|---|---|---|---|---|---|---|---|
| A Point | B Point | A Point | B Point | afixed end (m/s2) | A Point | B Point | afixed end (m/s2) | |
| 15 | 14.99 | 62.18 | 1.69 × 10−3 | 6.99 × 10−3 | −14.99 | 9.08 × 10−2 | 0.37 | 12.32 |
| 18 | 14.95 | 121.39 | 1.17 × 10−3 | 9.47 × 10−3 | −14.99 | 8.24 × 10−2 | 0.55 | 11.76 |
| 20 | 14.93 | 172.67 | 0.94 × 10−3 | 10.96 × 10−3 | −14.90 | 5.82 × 10−2 | 0.91 | 13.10 |
| 22 | 14.99 | 257.23 | 0.78 × 10−3 | 13.31 × 10−3 | −14.98 | 6.06 × 10−2 | 1.16 | 12.44 |
| 25 | 13 | 197.39 | 0.61 × 10−3 | 8 × 10−3 | −14.99 | 8.26 × 10−2 | 1.08 | 7.53 |
| 30 | 14.27 | 101.54 | 0.40 × 10−3 | 2.85 × 10−3 | −14.29 | 6.42 × 10−2 | 0.46 | 8.85 |
| f (Hz) | C1 (F) | R1 (Ω) | L1 (H) |
|---|---|---|---|
| 15 | −0.05 | 0.32 | 1.79 × 10−3 |
| 18 | −0.07 | 0.19 | 0.92 × 10−3 |
| 20 | −0.09 | 0.11 | 0.64 × 10−3 |
| 22 | −0.11 | 0.08 | 0.43 × 10−3 |
| 25 | −0.07 | 0.06 | 0.49 × 10−3 |
| 30 | −0.02 | 0.17 | 1.05 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Perez-Alfaro, I.; Gil-Hernandez, D.; Murillo, N.; Bernal, C. On Mechanical and Electrical Coupling Determination at Piezoelectric Harvester by Customized Algorithm Modeling and Measurable Properties. Sensors 2022, 22, 3080. https://doi.org/10.3390/s22083080
Perez-Alfaro I, Gil-Hernandez D, Murillo N, Bernal C. On Mechanical and Electrical Coupling Determination at Piezoelectric Harvester by Customized Algorithm Modeling and Measurable Properties. Sensors. 2022; 22(8):3080. https://doi.org/10.3390/s22083080
Chicago/Turabian StylePerez-Alfaro, Irene, Daniel Gil-Hernandez, Nieves Murillo, and Carlos Bernal. 2022. "On Mechanical and Electrical Coupling Determination at Piezoelectric Harvester by Customized Algorithm Modeling and Measurable Properties" Sensors 22, no. 8: 3080. https://doi.org/10.3390/s22083080
APA StylePerez-Alfaro, I., Gil-Hernandez, D., Murillo, N., & Bernal, C. (2022). On Mechanical and Electrical Coupling Determination at Piezoelectric Harvester by Customized Algorithm Modeling and Measurable Properties. Sensors, 22(8), 3080. https://doi.org/10.3390/s22083080