
AI Prediction of Brain Signals for Human Gait Using BCI Device and FBG Based Sensorial Platform for Plantar Pressure Measurements




Abstract
:1. Introduction
2. FBG Sensors and BCI Device
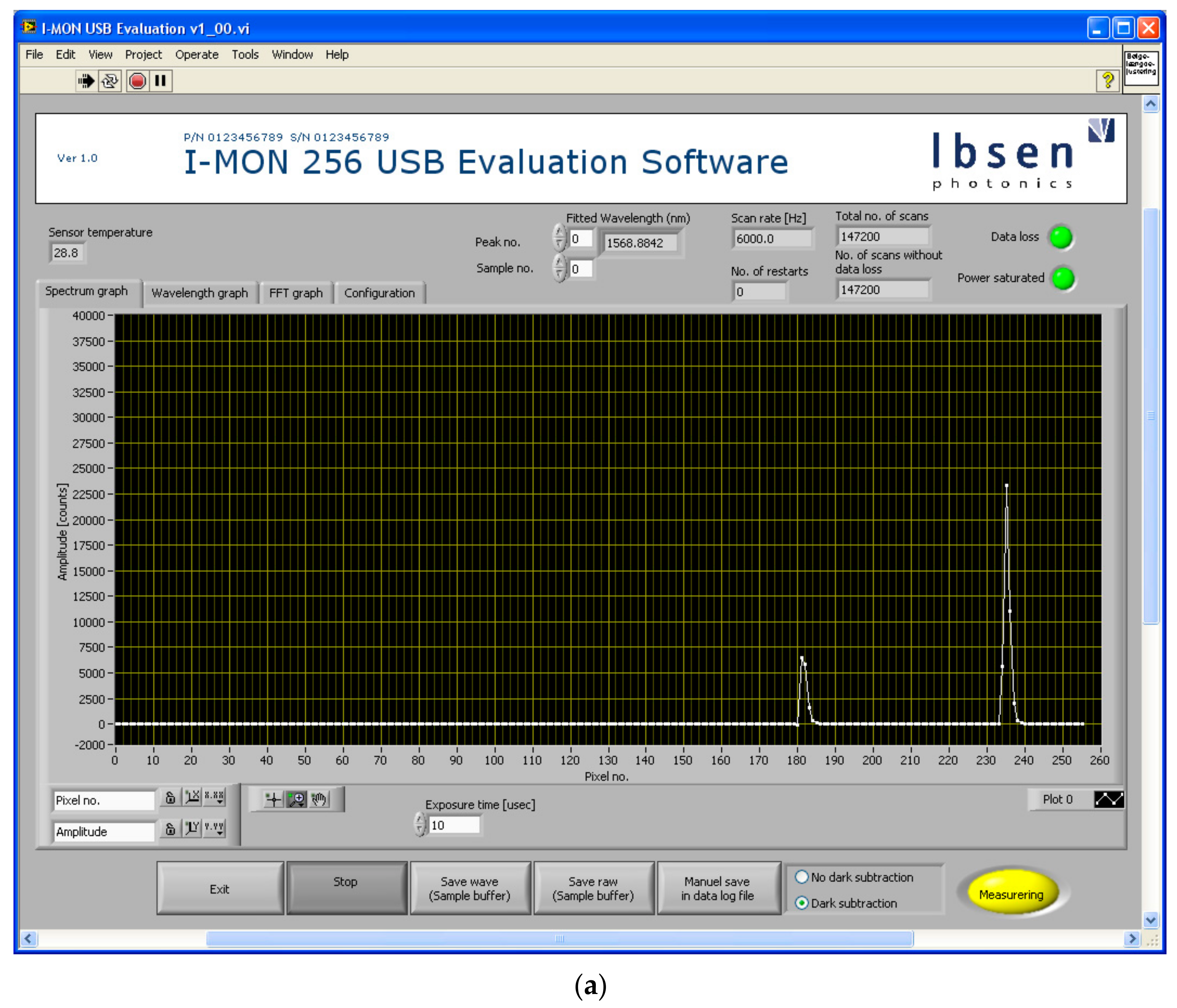
2.1. FBG Sensor
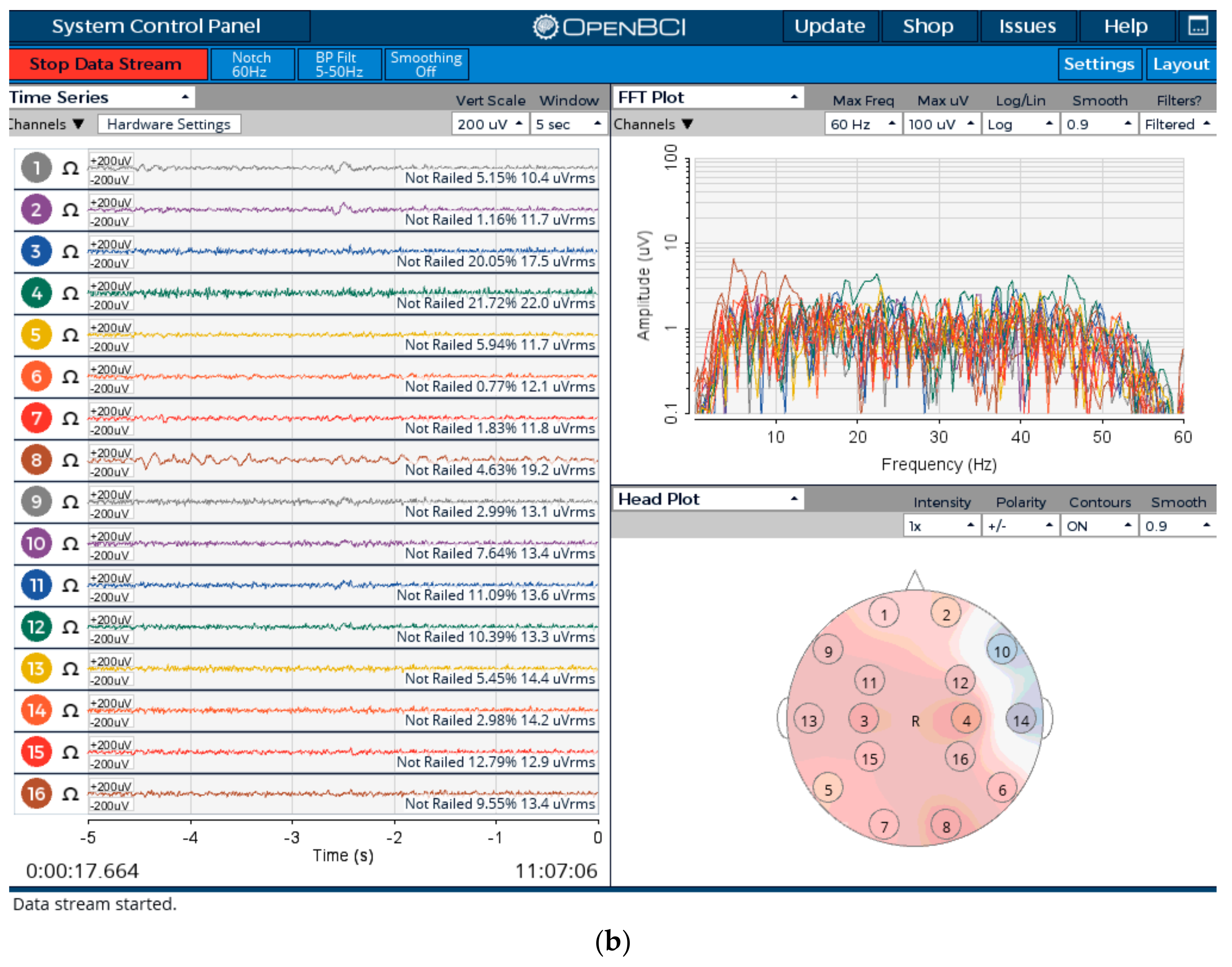
2.2. Brain Computer Interface (BCI) Device
- Designing an automated process that can improve on gait analysis data and provide valuable insight for the development of smart prosthetics in the future.
- Incorporating patient’s feedback using plantar pressure sensors and brain signals for correction and calibration.
- Creating a classification model that identifies brain activity related to plantar pressure profiles and predicts brain activities signals based on monitored plantar pressure.
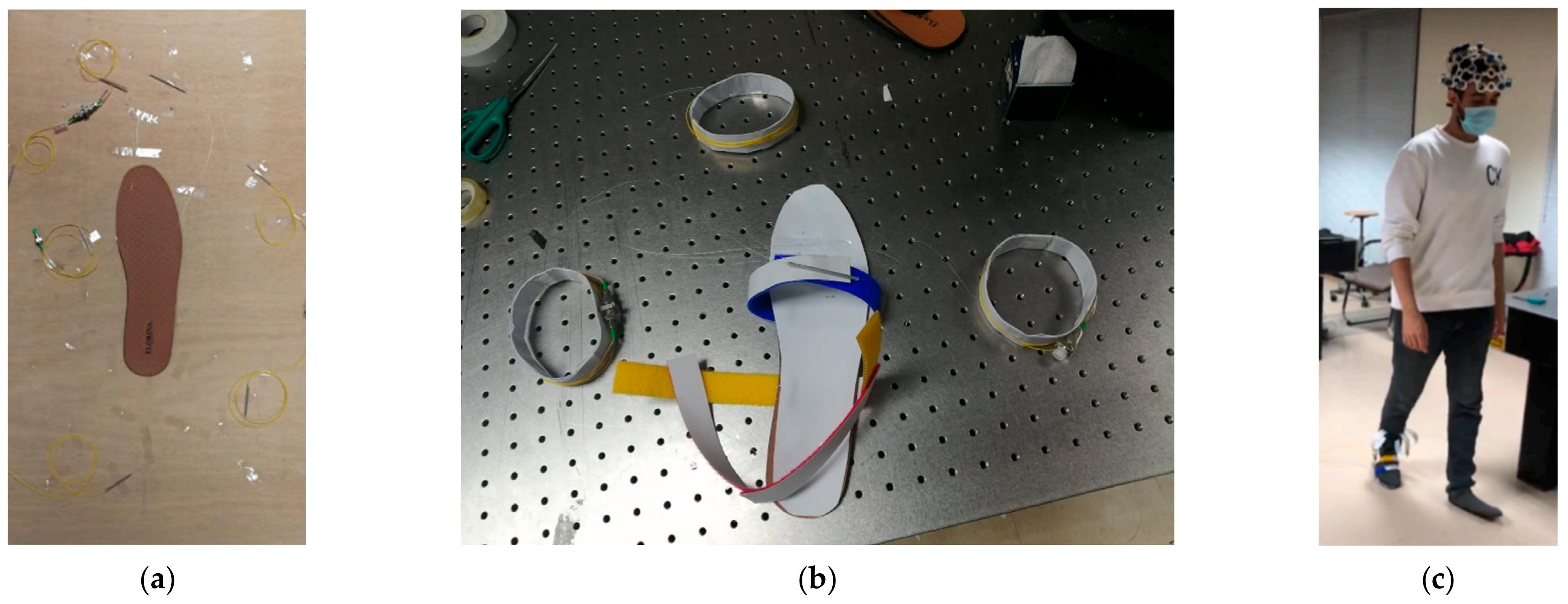
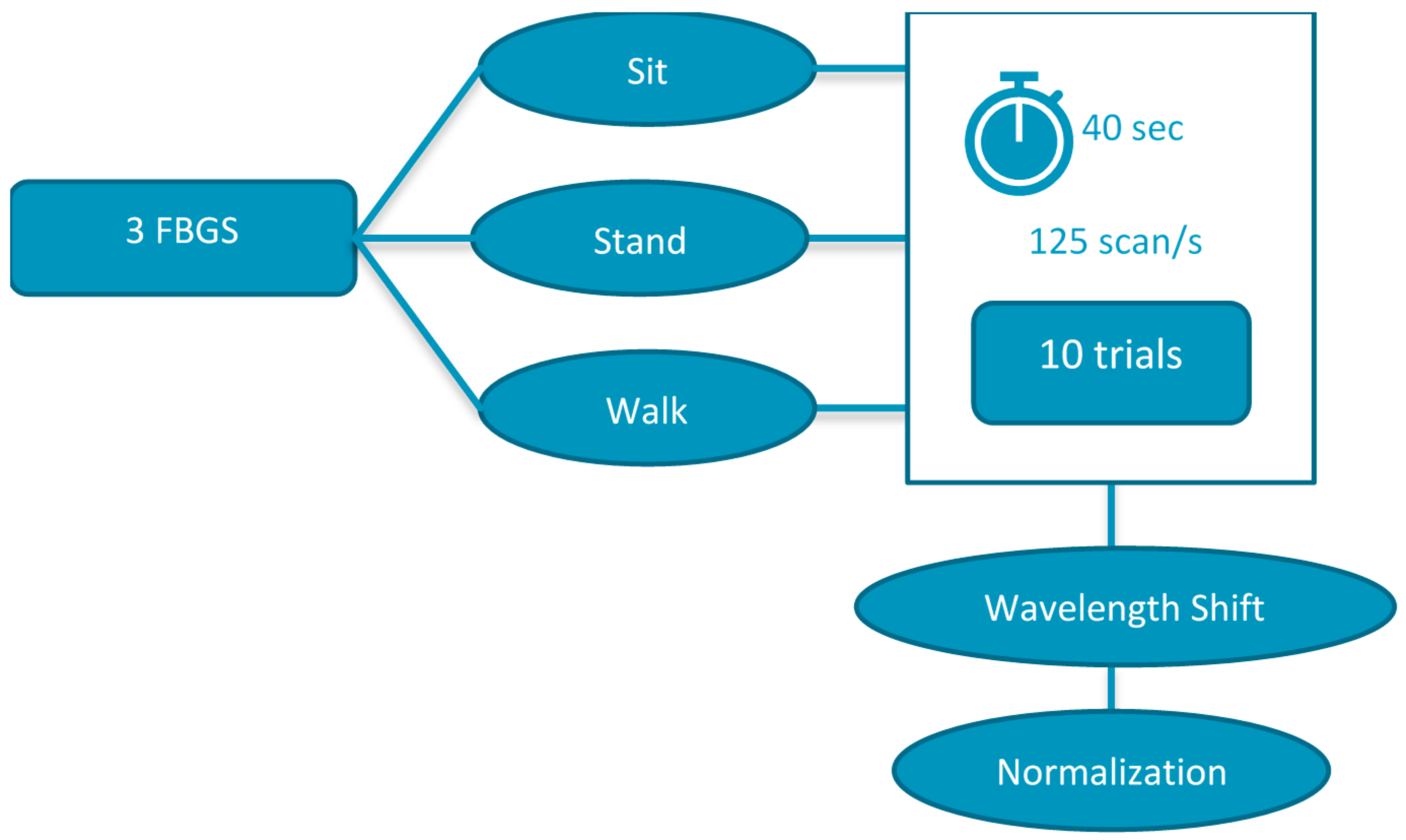
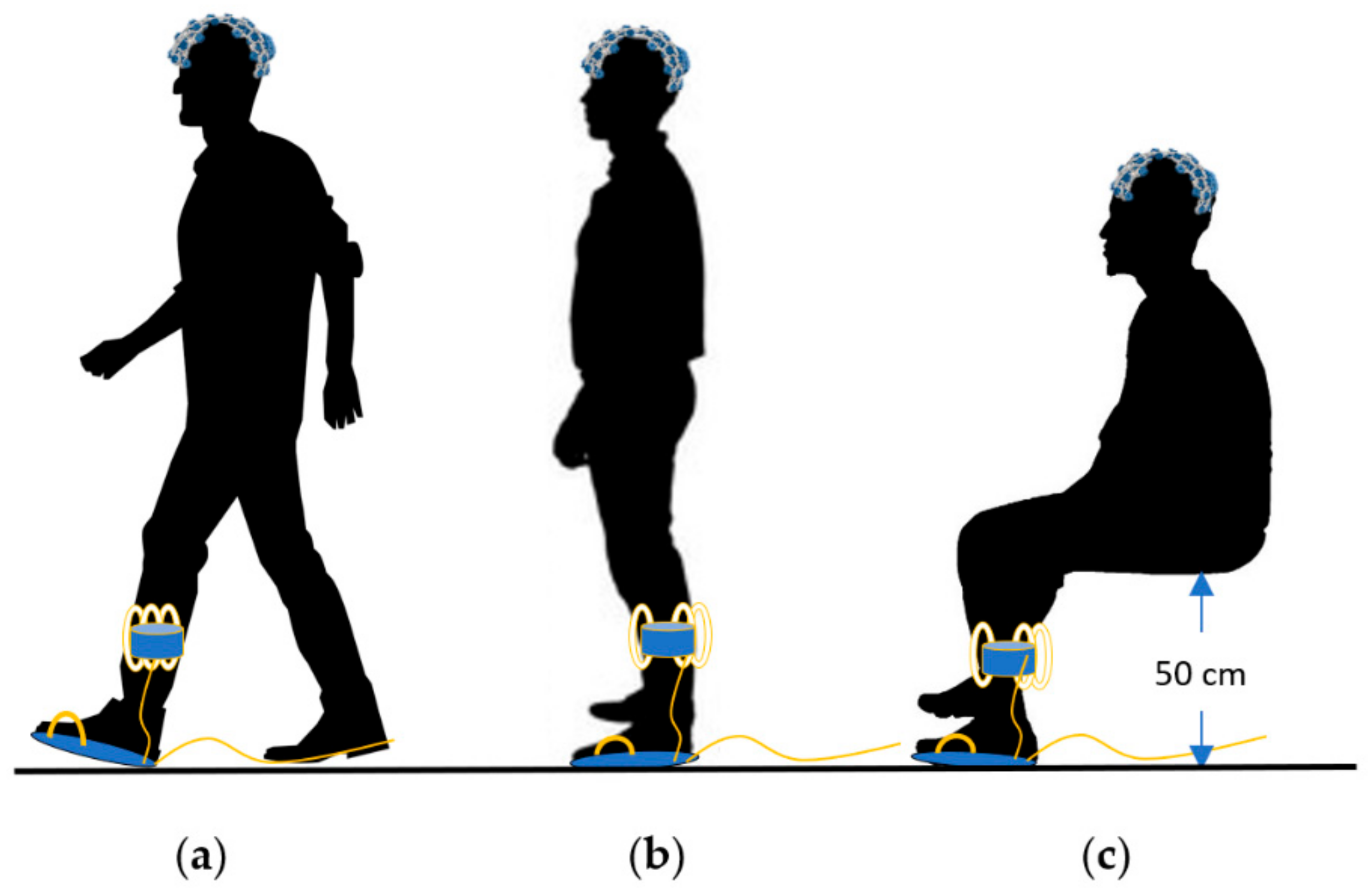
3. Experimental Setup
4. AI Implementation and Results
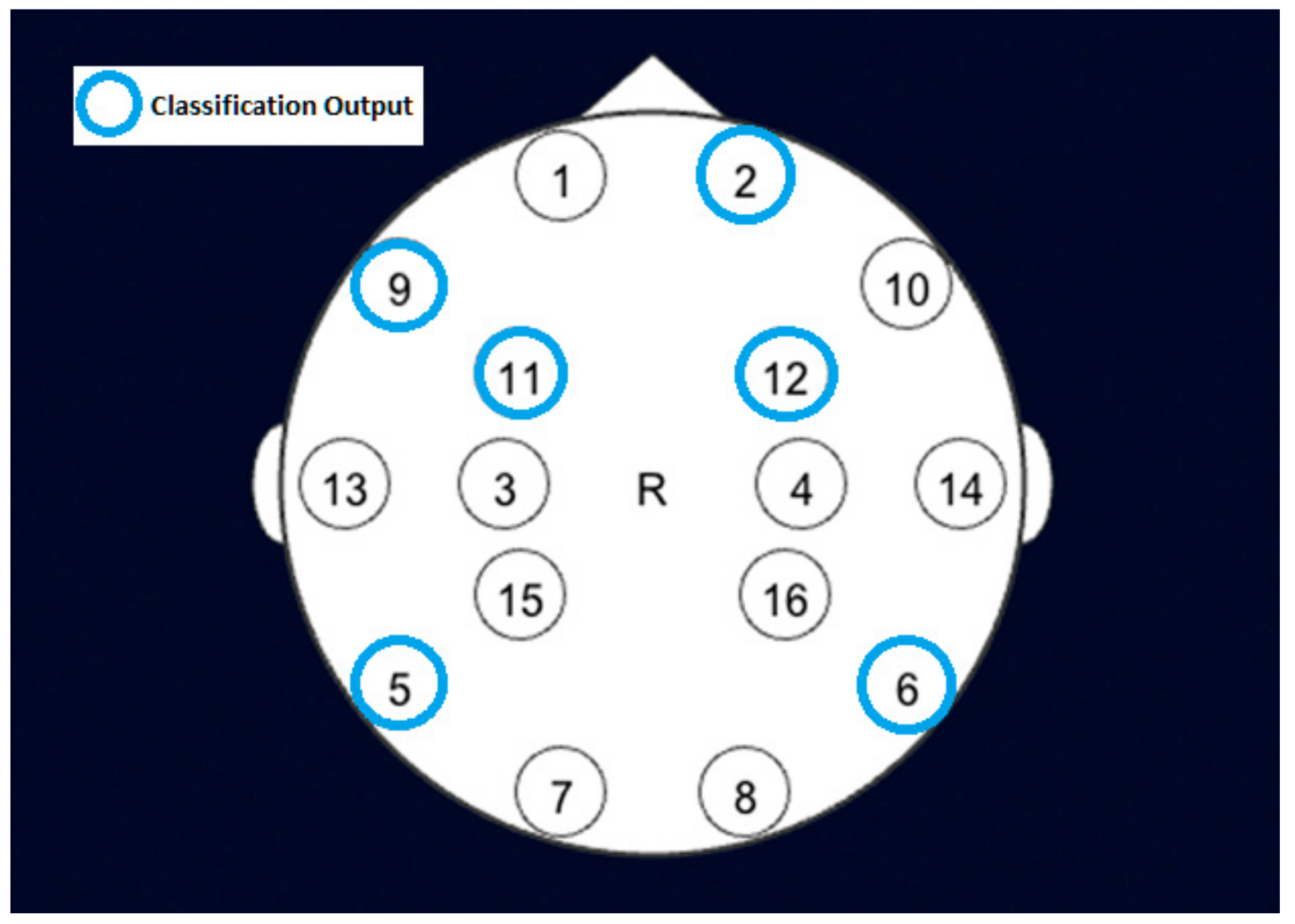
4.1. Part I—BCI Classification
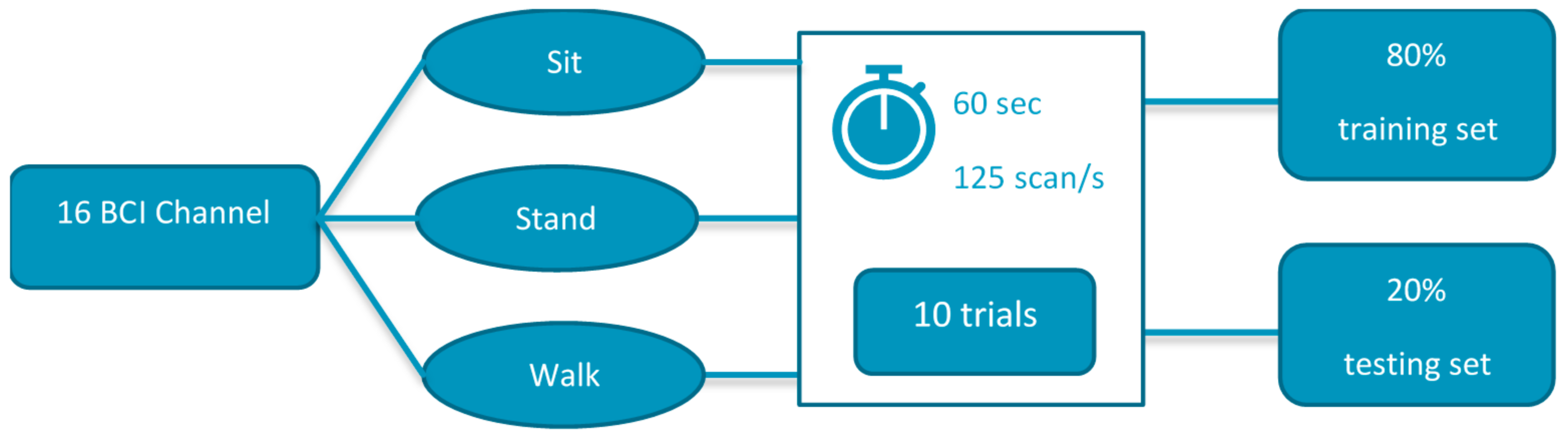
4.1.1. BCI Classification Experiment
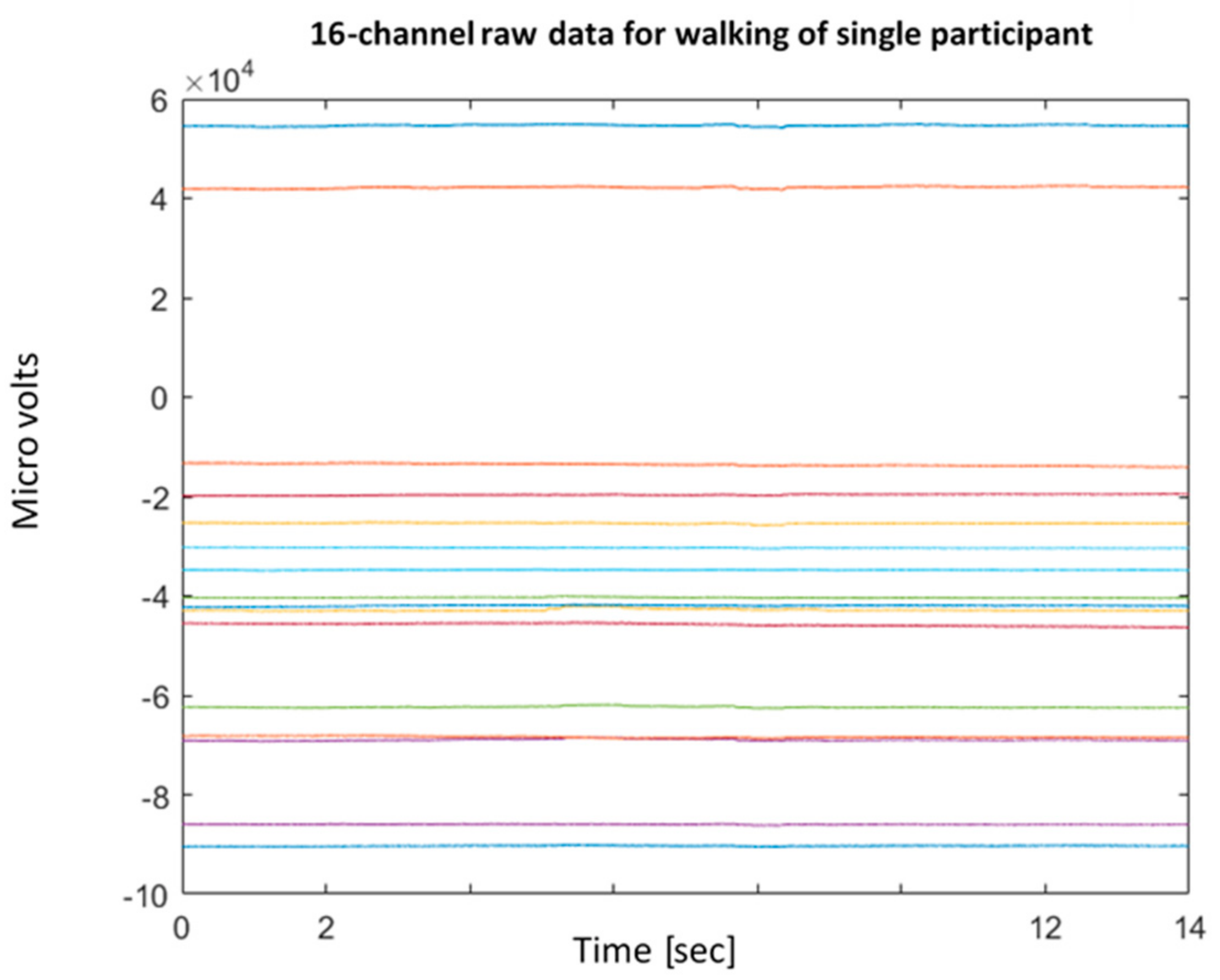
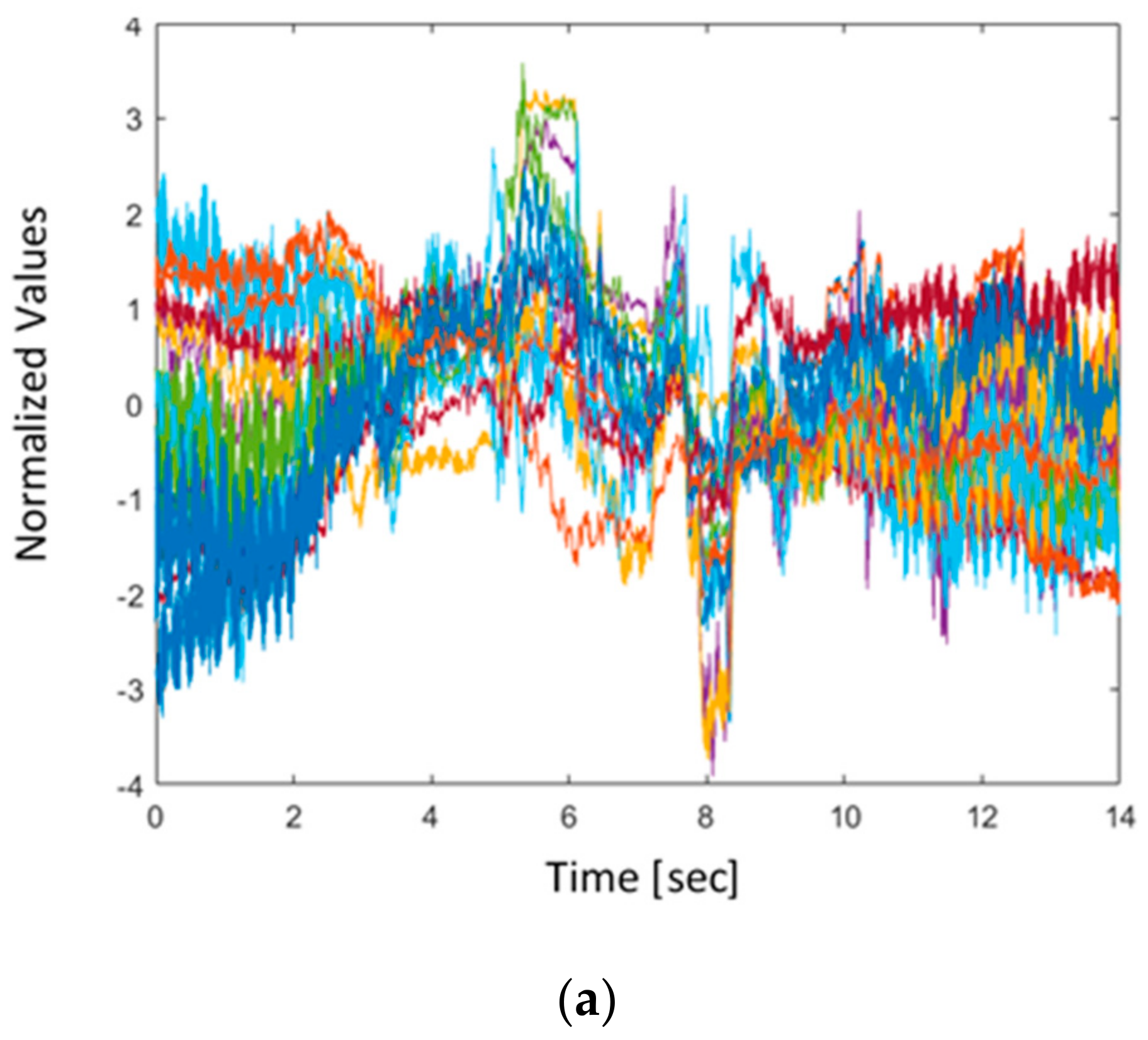
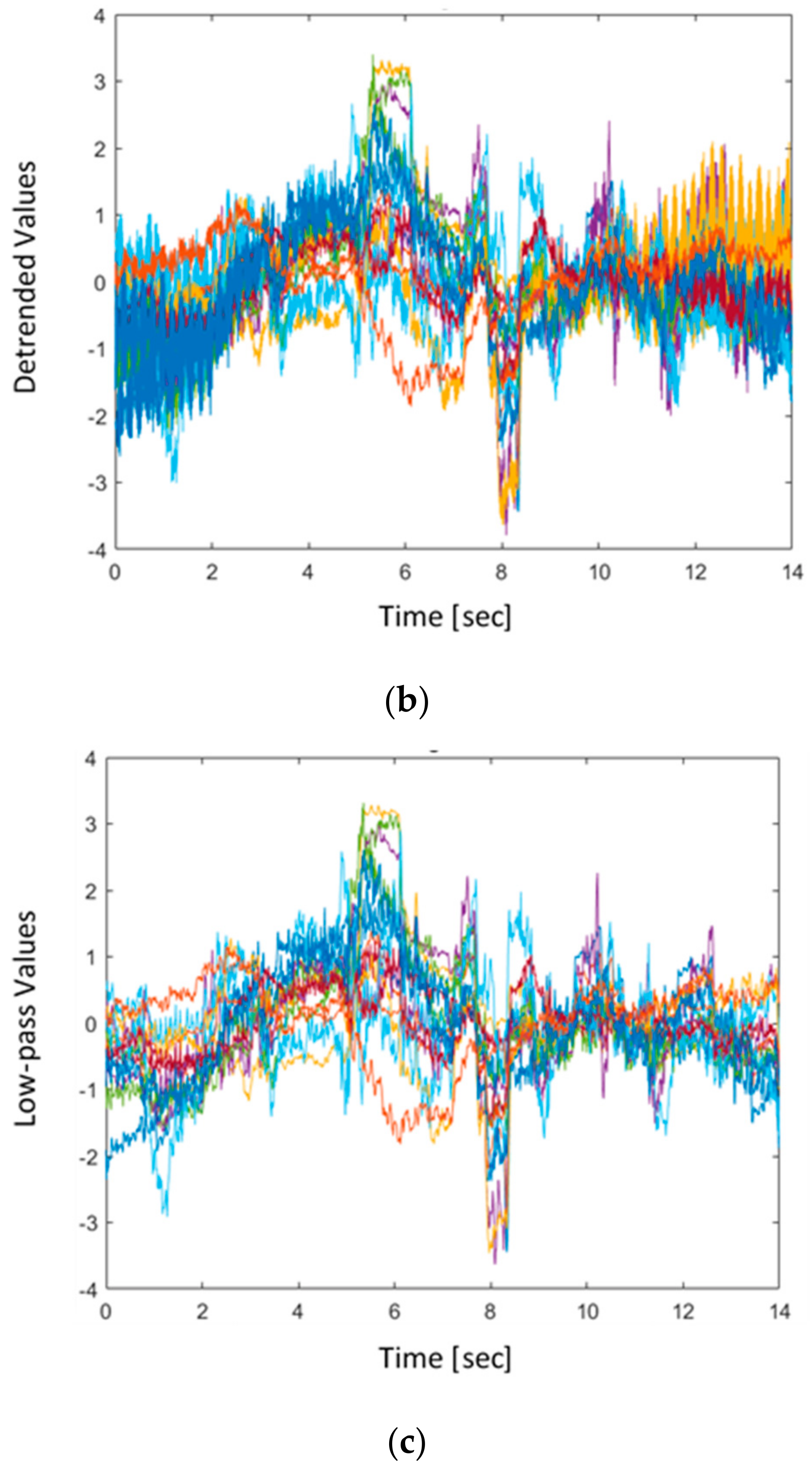
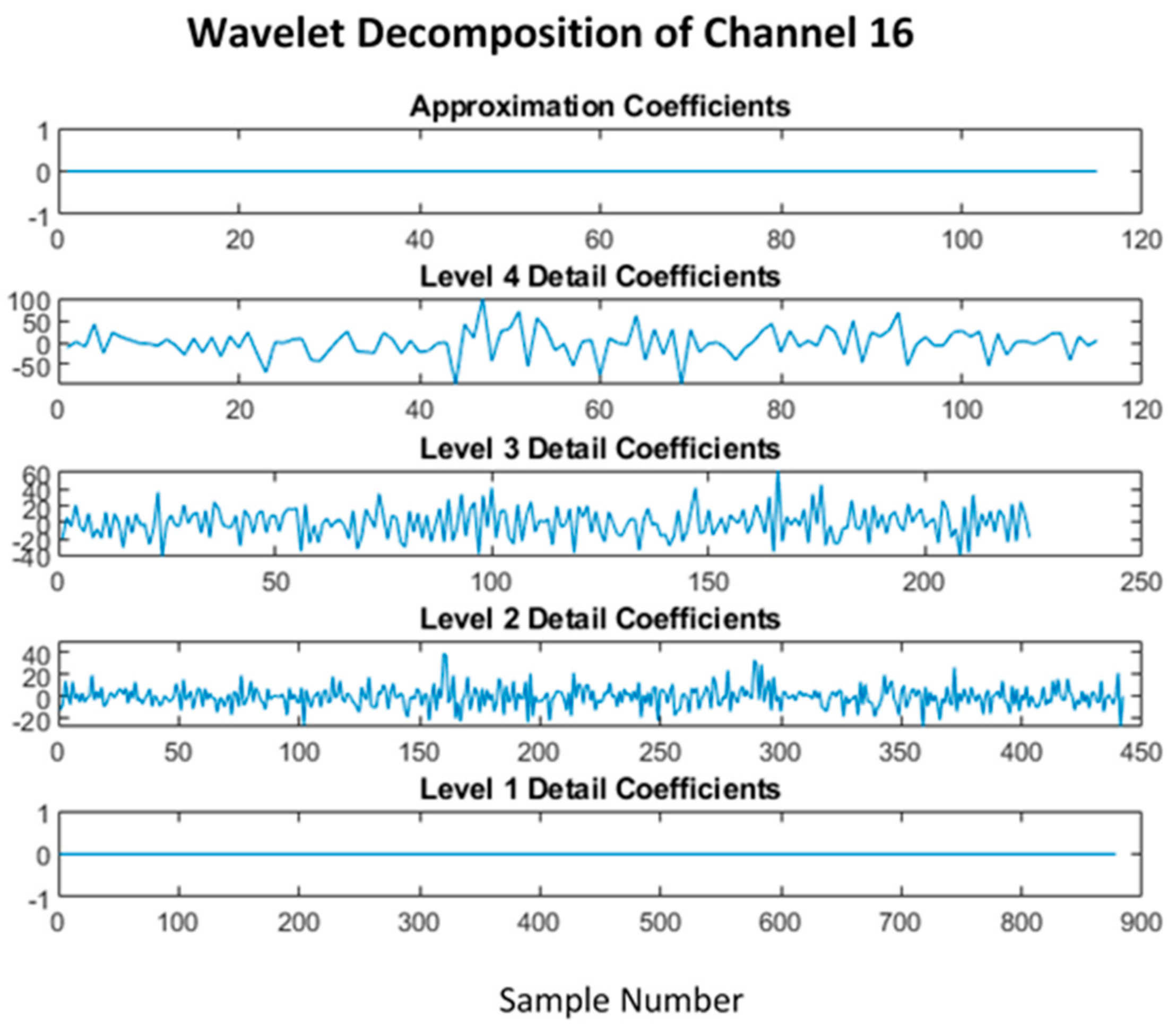
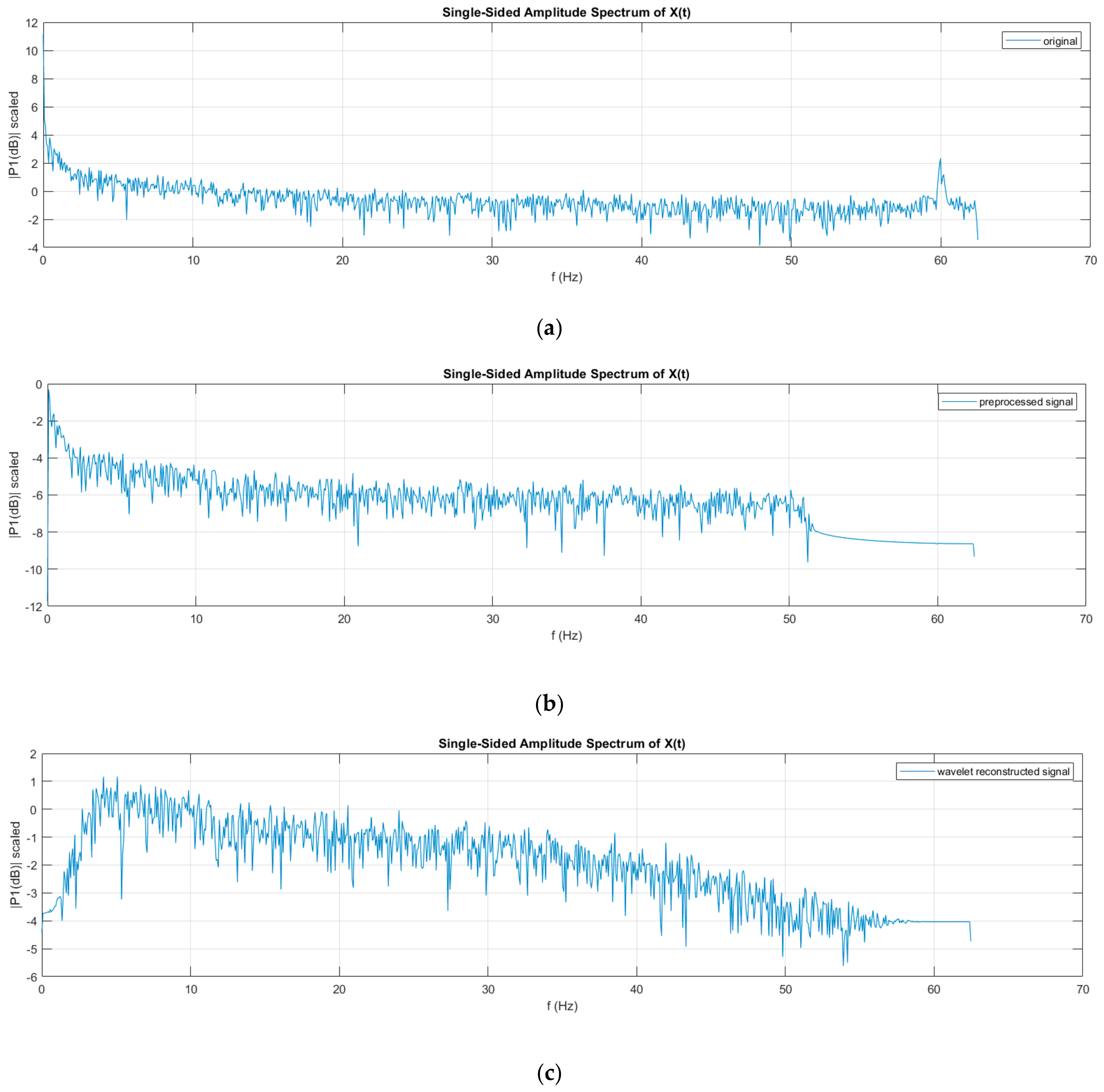
4.1.2. BCI Data Pre-Processing
4.1.3. Classification Models
K-Nearest Neighborhood (KNN)
Support Vector Machine (SVM)
Logistic Regression (LR)
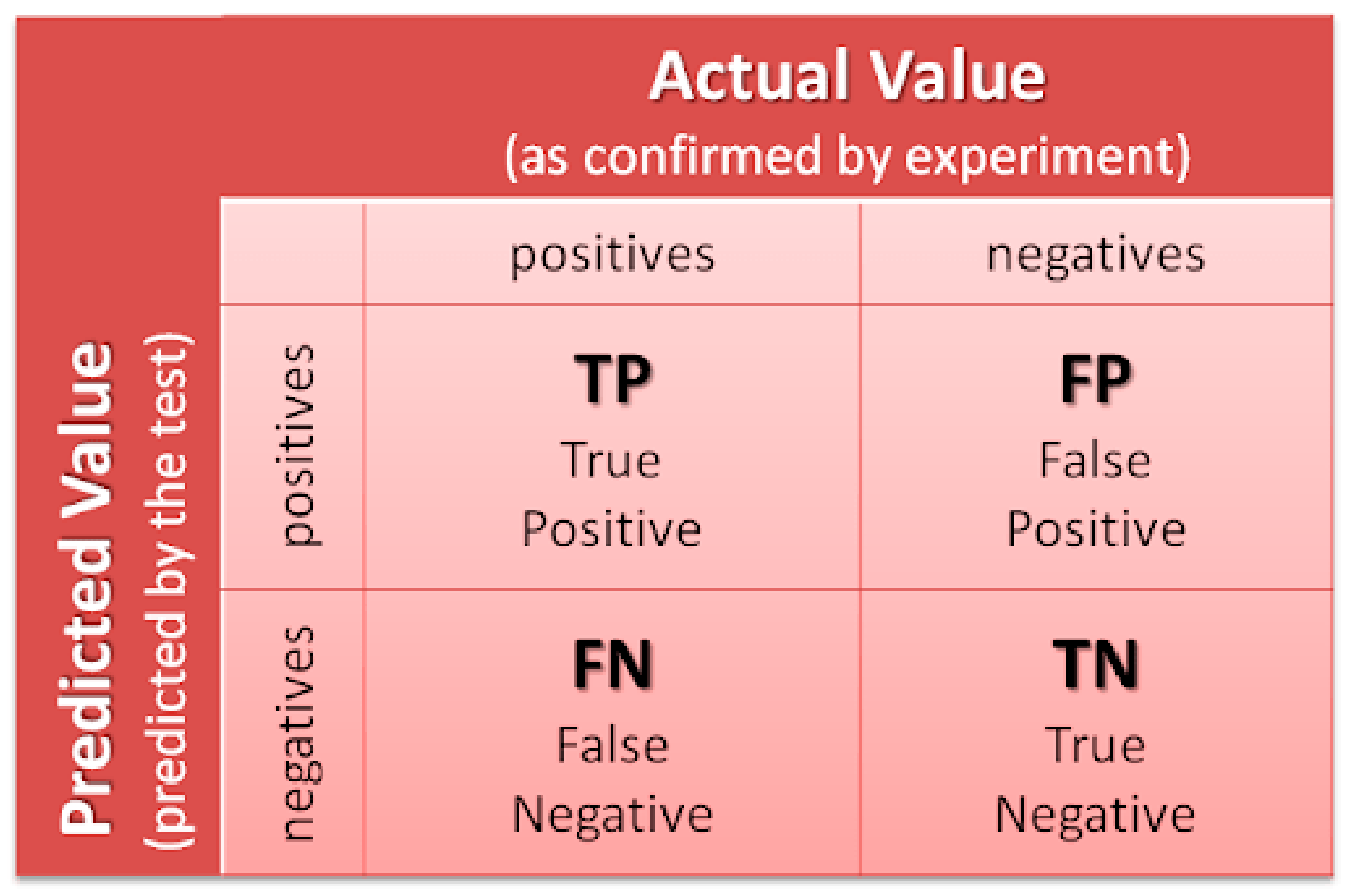
4.1.4. Performance Measure
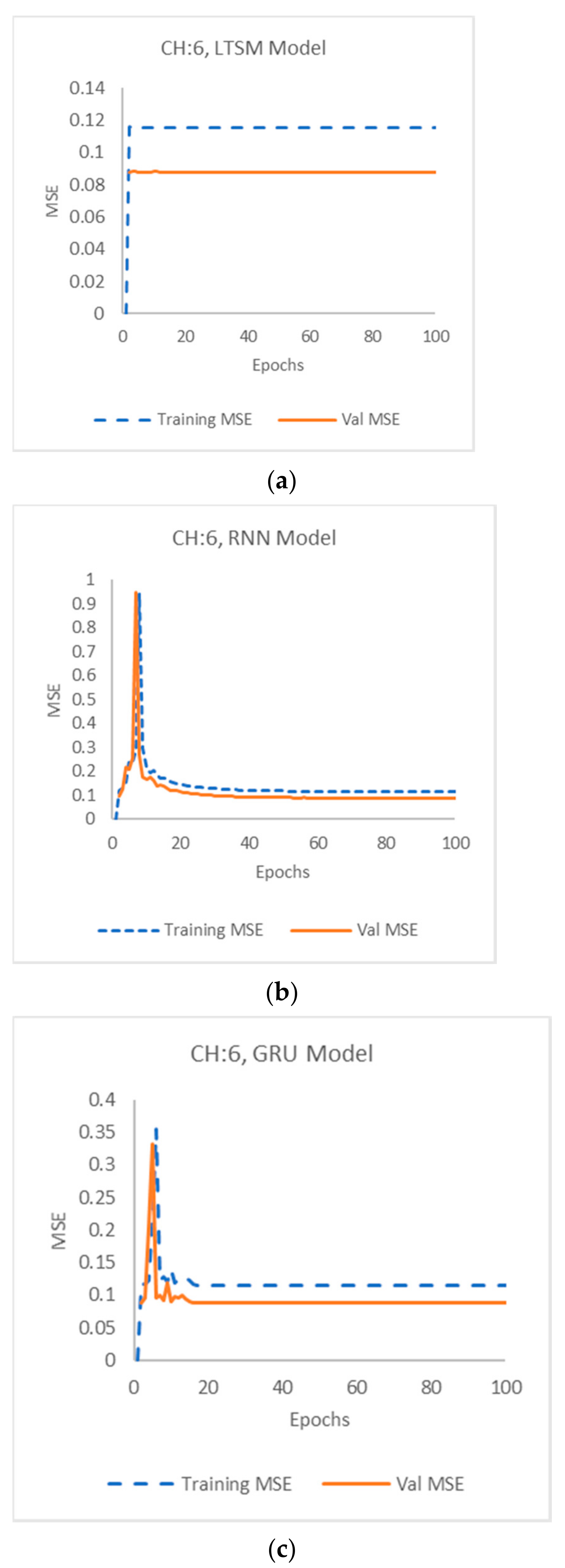
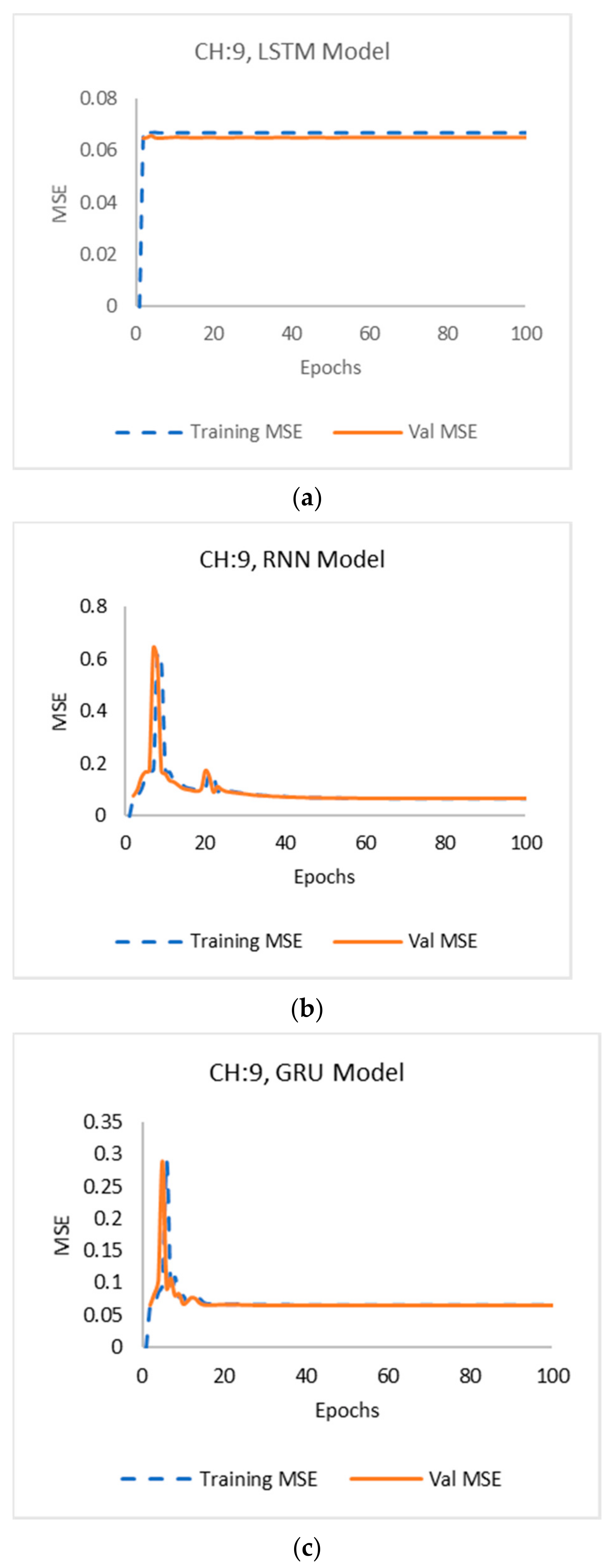
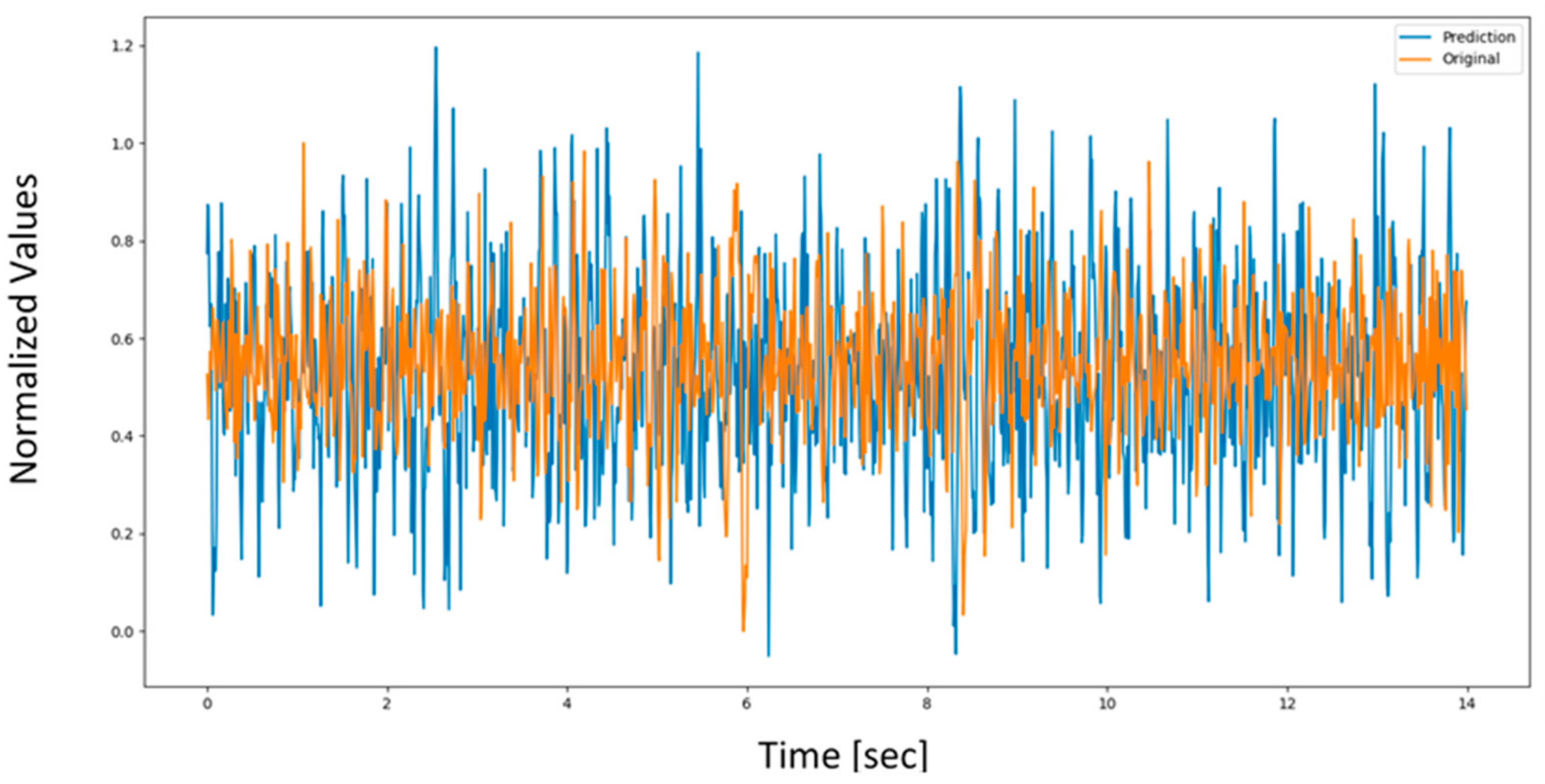
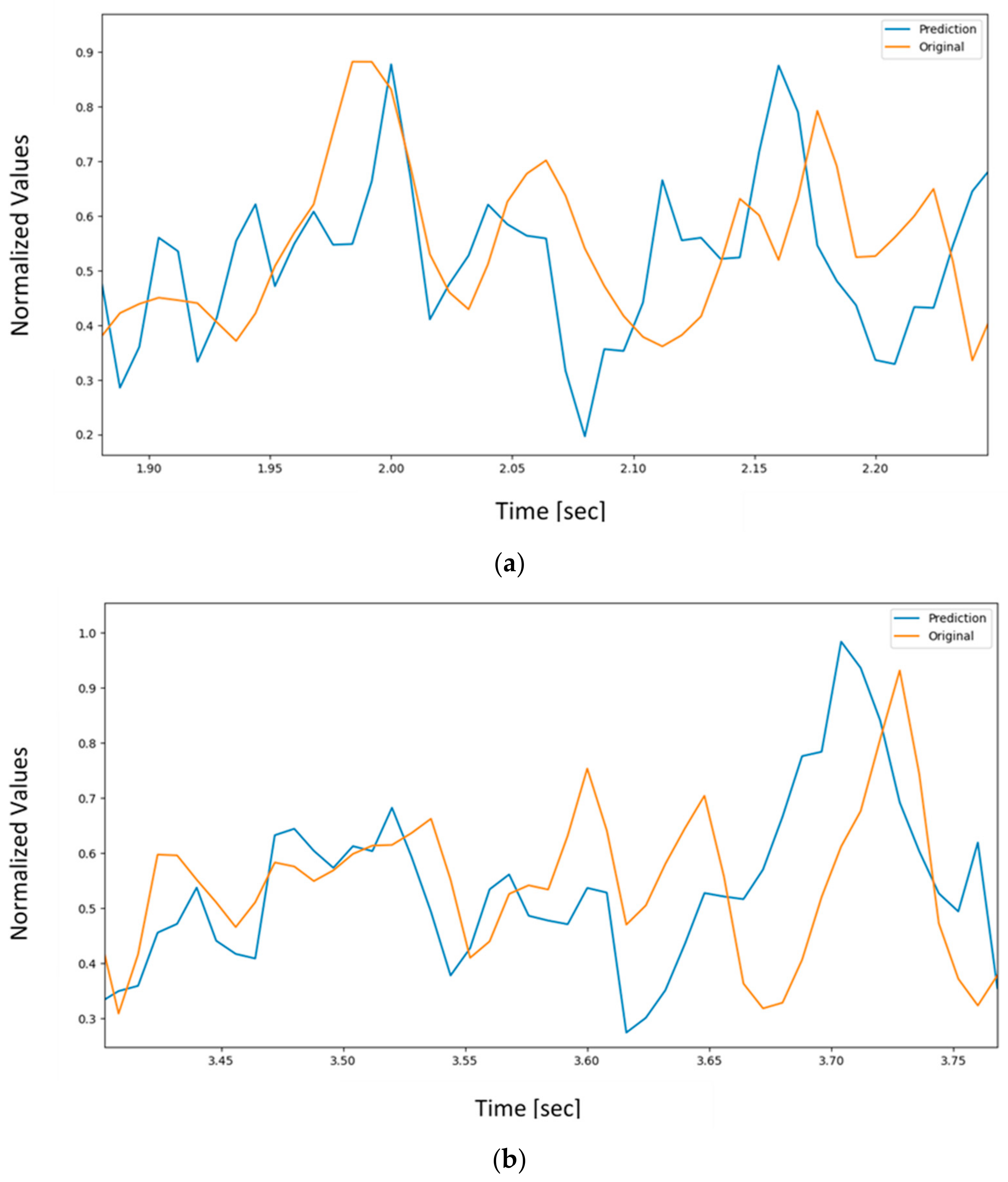
4.2. Part II—BCI Prediction
4.2.1. BCI Prediction Experiment
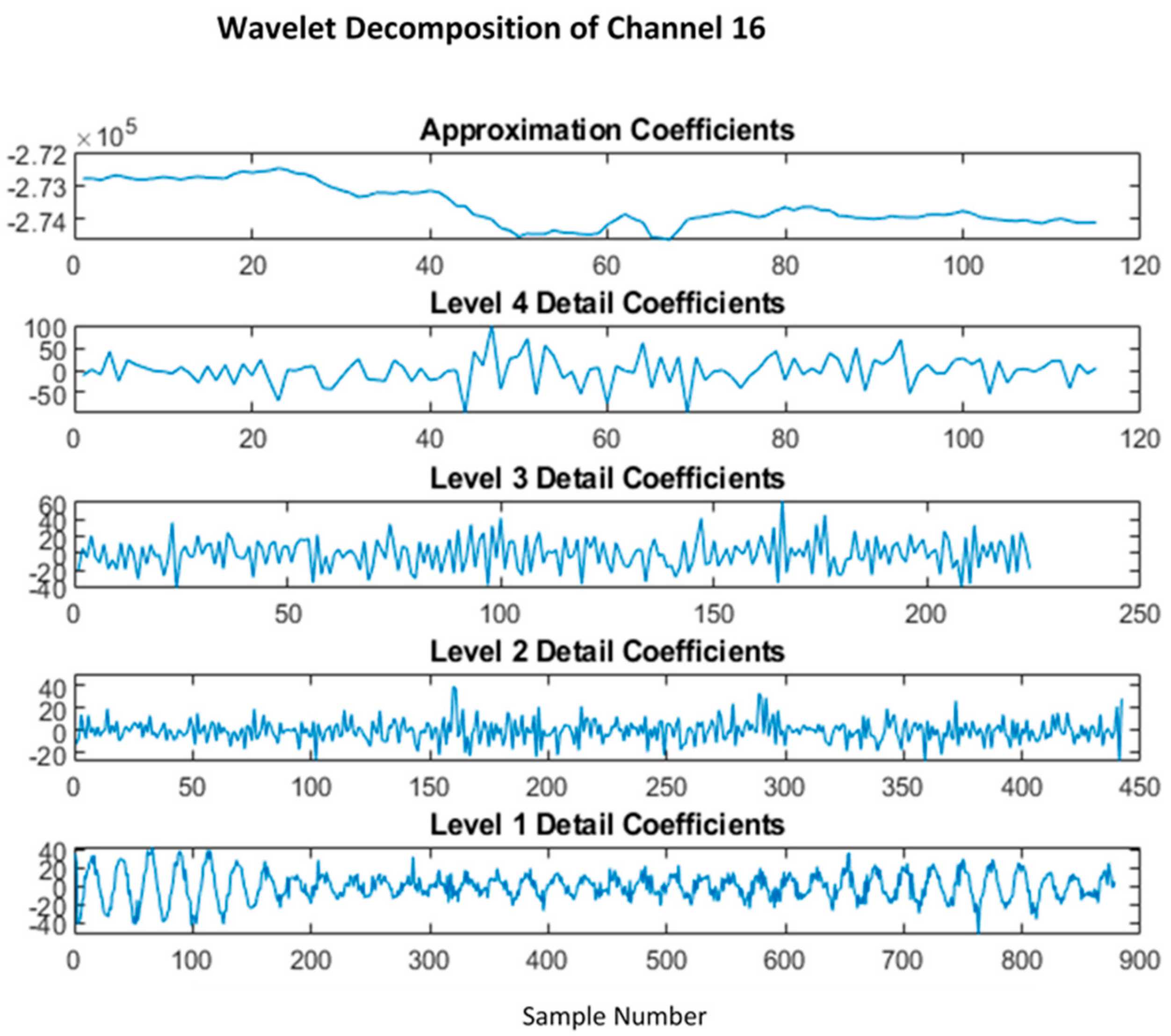
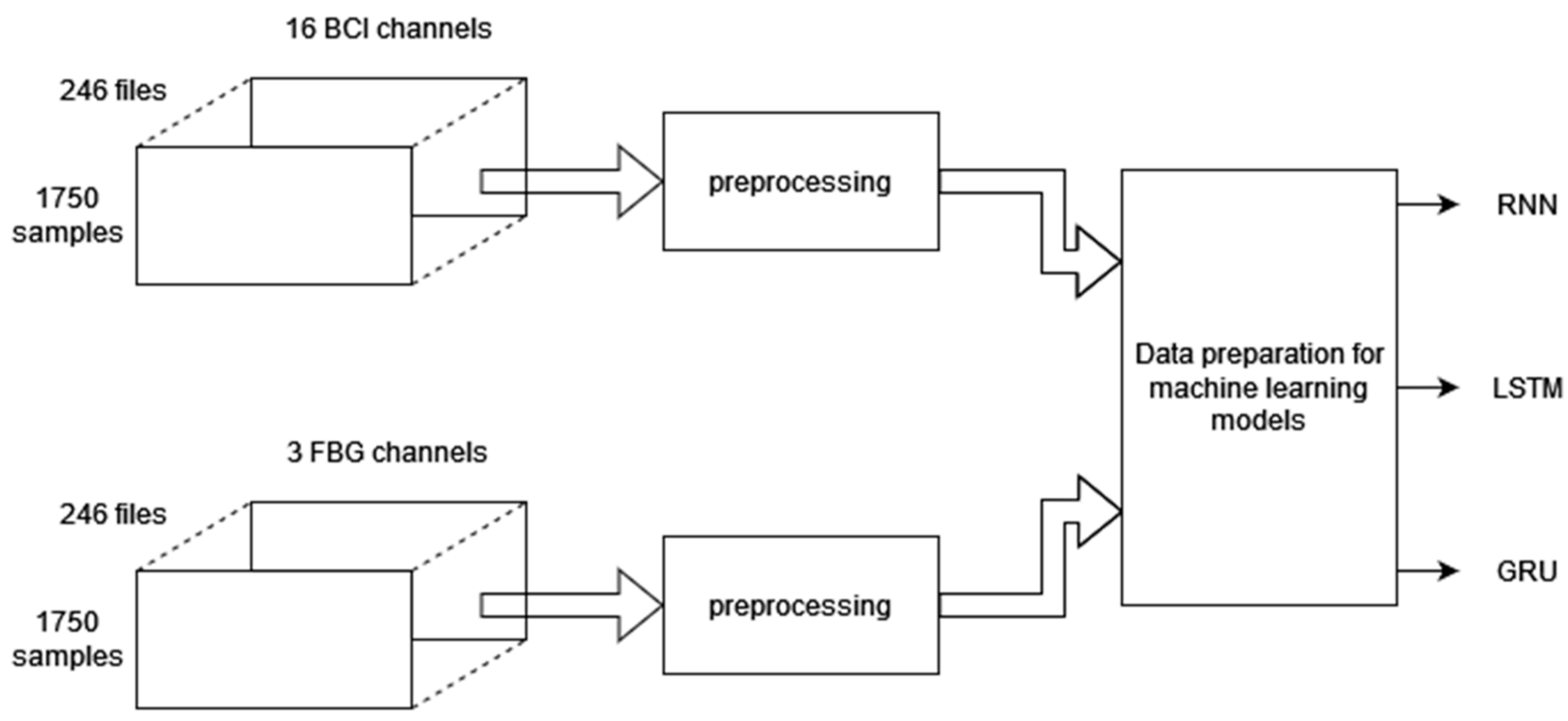
4.2.2. BCI Data Pre-Processing
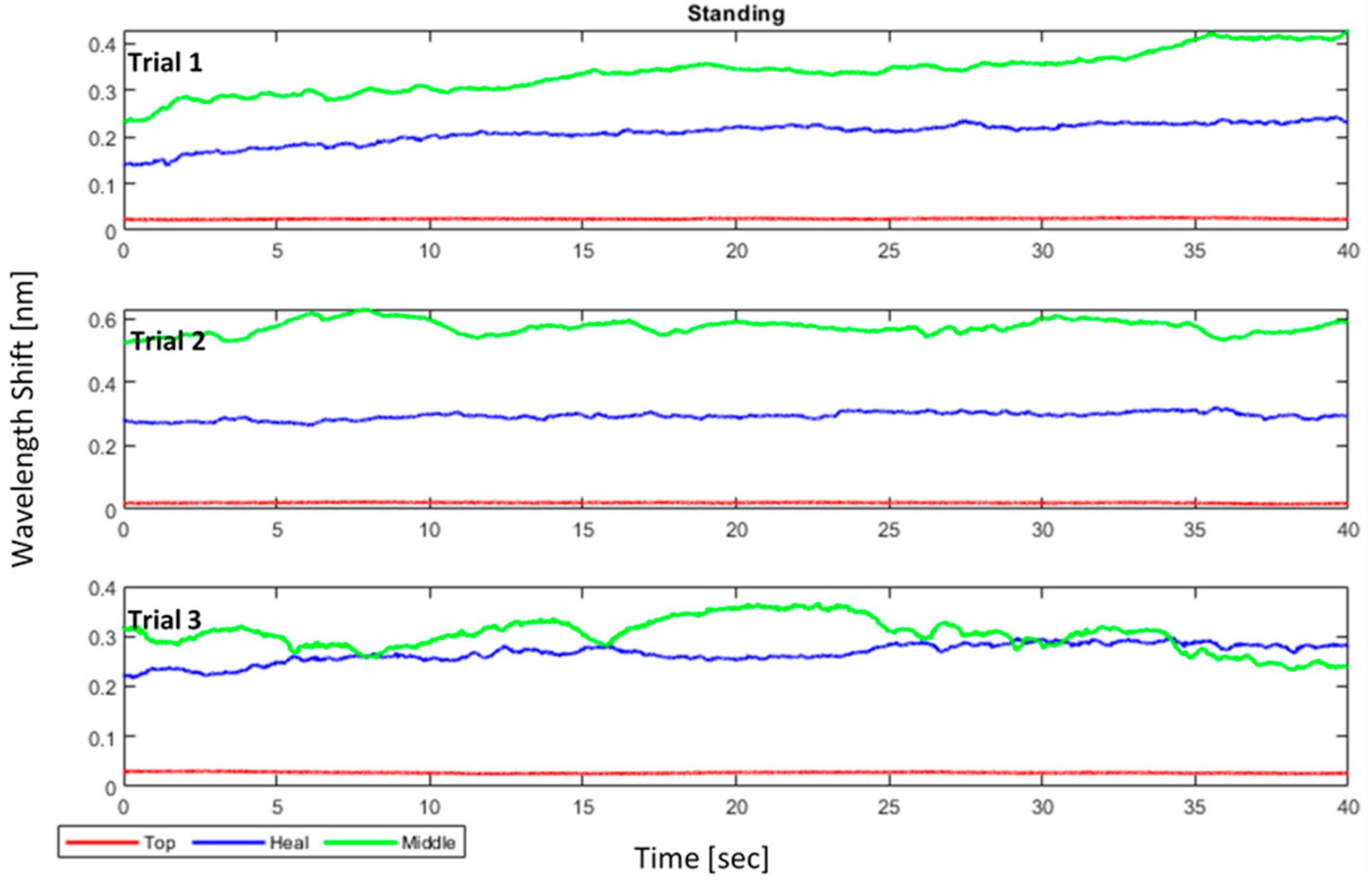
4.2.3. FBG Data Pre-Processing
4.2.4. Performance Measure
5. Conclusions
6. Recommendations
- 1.
- The FBG optical cables can be replaced with free-space optical communications to obtain the data wirelessly and allow longer distance and duration for trial.
- 2.
- Deep learning algorithms can be written from scratch to have lower MSE instead of using PyTorch models.
- 3.
- Different types of foot insoles can be used to obtain a variety of plantar pressure data.
- 4.
- Adding a temperature element in the insole to examine the effect of plantar temperature on brain activity signals.
- 5.
- For production, the current BCI device can be substituted by a BCI device with a few channels, which will cut costs and make this process cheaper and more accessible.
- 6.
- Since the FBG sensors are fragile, the insole should have a grooved housing for the sensors’ protection, with a hard material to preserve the pressure sensitivity. The FBG length should also be shortened to extend only to the ankle and connected to a portable light source and monitor. It will significantly enhance mobility and allow for more accurate testing.
- 7.
- Furthermore, if the machine learning model had more data to learn from, a more robust trained model could be developed for medical and research use.
- 8.
- Further research into miniature embeddable sensors such as FBGs will allow exploring their potential for providing a sensorial base to mimic the human sense of touch.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Suresh, R.; Bhalla, S.; Hao, J.; Singh, C. Development of a high resolution plantar pressure monitoring pad based on fiber Bragg grating (FBG) sensors. Technol. Health Care 2015, 23, 785–794. [Google Scholar] [CrossRef] [PubMed]
- Alfuth, M.; Rosenbaum, D. Effects of changes in plantar sensory feedback on human gait characteristics: A systematic review. Footwear Sci. 2012, 4, 1–22. [Google Scholar] [CrossRef]
- Abdul Razak, A.H.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ramirez-Bautista, J.A.; Hernández-Zavala, A.; Chaparro-Cárdenas, S.L.; Huerta-Ruelas, J.A. Review on plantar data analysis for disease diagnosis. Biocybern. Biomed. Eng. 2018, 38, 342–361. [Google Scholar] [CrossRef]
- Klöpfer-Krämer, I.; Brand, A.; Wackerle, H.; Müßig, J.; Kröger, I.; Augat, P. Gait analysis—Available platforms for outcome assessment. Injury 2020, 51, S90–S96. [Google Scholar] [CrossRef]
- Van De Meent, H.; Hopman, M.T.; Frölke, J.P. Walking ability and quality of life in subjects with transfemoral amputation: A comparison of osseointegration with socket prostheses. Arch. Phys. Med. Rehabil. 2013, 94, 2174–2178. [Google Scholar] [CrossRef]
- Ahmad, N.; Thomas, G.N.; Gill, P.; Torella, F. The prevalence of major lower limb amputation in the diabetic and non-diabetic population of England 2003–2013. Diabetes Vasc. Dis. Res. 2016, 13, 348–353. [Google Scholar] [CrossRef]
- Alzahrani, H.A. Diabetes-related lower extremities amputations in Saudi Arabia: The magnitude of the problem. Ann. Vasc. Dis. 2012, 5, 151–156. [Google Scholar] [CrossRef] [Green Version]
- Eapen, B.C.; Murphy, D.P.; Cifu, D.X. Neuroprosthetics in amputee and brain injury rehabilitation. Exp. Neurol. 2017, 287, 479–485. [Google Scholar] [CrossRef]
- Butt, A.M.; Qureshi, K.K. Smart lower limb prostheses with a fiber optic sensing sole: A multicomponent design approach. Sens. Mater. 2019, 31, 2965–2979. [Google Scholar] [CrossRef]
- Bensmaia, S.J.; Tyler, D.J.; Micera, S. Restoration of sensory information via bionic hands. Nat. Biomed. Eng. 2020, 4, 1–13. [Google Scholar] [CrossRef]
- Domínguez-Morales, M.J.; Luna-Perejón, F.; Miró-Amarante, L.; Hernández-Velázquez, M.; Sevillano-Ramos, J.L. Smart footwear insole for recognition of foot pronation and supination using neural networks. Appl. Sci. 2019, 9, 3970. [Google Scholar] [CrossRef] [Green Version]
- Lakho, R.A.; Yi-Fan, Z.; Jin-Hua, J.; Cheng-Yu, H.; Ahmed Abro, Z. A smart insole for monitoring plantar pressure based on the fiber Bragg grating sensing technique. Text. Res. J. 2019, 89, 3433–3446. [Google Scholar] [CrossRef]
- Taffoni, F.; Formica, D.; Saccomandi, P.; Di Pino, G.; Schena, E. Optical fiber-based MR-compatible sensors for medical applications: An overview. Sensors 2013, 13, 14105–14120. [Google Scholar] [CrossRef]
- Roriz, P.; Carvalho, L.; Frazão, O.; Santos, J.L.; Simões, J.A. From conventional sensors to fibre optic sensors for strain and force measurements in biomechanics applications: A review. J. Biomech. 2014, 47, 1251–1261. [Google Scholar] [CrossRef] [Green Version]
- Massaroni, C.; Saccomandi, P.; Schena, E. Medical Smart Textiles Based on Fiber Optic Technology: An Overview. J. Funct. Biomater. 2015, 6, 204–221. [Google Scholar] [CrossRef]
- Qureshi, K.K. Detection of Plantar Pressure Using an Optical Technique. In Proceedings of the 2021 7th International Conference on Engineering, Applied Sciences and Technology, Bangkok, Thailand, 1–3 April 2021; pp. 77–80. [Google Scholar] [CrossRef]
- Leal-Junior, A.; Theodosiou, A.; Díaz, C.; Marques, C.; Pontes, M.J.; Kalli, K.; Frizera-Neto, A. Fiber Bragg gratings in CYTOP fibers embedded in a 3D-printed flexible support for assessment of human-robot interaction forces. Materials 2018, 11, 2305. [Google Scholar] [CrossRef] [Green Version]
- Chereshnev, R.; Kertész-Farkas, A. HuGaDB: Human gait database for activity recognition from wearable inertial sensor networks. In Proceedings of the International Conference on Analysis of Images, Social Networks and Texts, Moscow, Russia, 15–16 October 2018; pp. 131–141. [Google Scholar] [CrossRef] [Green Version]
- Nazmi, N.; Abdul Rahman, M.A.; Yamamoto, S.I.; Ahmad, S.A. Walking gait event detection based on electromyography signals using artificial neural network. Biomed. Signal Processing Control. 2019, 47, 334–343. [Google Scholar] [CrossRef]
- Choi, A.; Jung, H.; Mun, J.H. Single inertial sensor-based neural networks to estimate COM-COP inclination angle during walking. Sensors 2019, 19, 2974. [Google Scholar] [CrossRef] [Green Version]
- Mudgal, S.K.; Sharma, S.K.; Chaturvedi, J.; Sharma, A. Brain computer interface advancement in neurosciences: Applications and issues. Interdiscip. Neurosurg. 2020, 20, 100694. [Google Scholar] [CrossRef]
- Ullah, H.; Uzair, M.; Mahmood, A.; Ullah, M.; Khan, S.D.; Cheikh, F.A. Internal Emotion Classification Using EEG Signal with Sparse Discriminative Ensemble. IEEE Access 2019, 7, 40144–40153. [Google Scholar] [CrossRef]
- Zhang, D.; Yao, L.; Chen, K.; Monaghan, J. A Convolutional Recurrent Attention Model for Subject-Independent EEG Signal Analysis. IEEE Signal Process. Lett. 2019, 26, 715–719. [Google Scholar] [CrossRef]
- Hua, X.; Ono, Y.; Peng, L.; Cheng, Y.; Wang, H. Target Detection within Nonhomogeneous Clutter Via Total Bregman Divergence-Based Matrix Information Geometry Detectors. IEEE Trans. Signal Process. 2021, 69, 4326–4340. [Google Scholar] [CrossRef]
- Gao, Y.; Li, H.; Himed, B. Adaptive subspace tests for multichannel signal detection in auto-regressive disturbance. IEEE Trans. Signal Process. 2018, 66, 5577–5587. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Valle, M. Human Tactile Sensing; Springer: Cham, Switzerland, 2013; ISBN 978-94-007-0578-4. [Google Scholar]
- Maurer, C.; Mergner, T.; Peterka, R.J. Multisensory control of human upright stance. Exp. Brain Res. 2006, 171, 231–250. [Google Scholar] [CrossRef]
- Labriffe, M.; Annweiler, C.; Amirova, L.E.; Gauquelin-Koch, G.; Ter Minassian, A.; Leiber, L.M.; Beauchet, O.; Custaud, M.A.; Dinomais, M. Brain activity during mental imagery of gait versus gait-like plantar stimulation: A novel combined functional MRI paradigm to better understand cerebral gait control. Front. Hum. Neurosci. 2017, 11, 106. [Google Scholar] [CrossRef] [Green Version]
- Mekid, S.; Butt, A.M.; Qureshi, K. Integrity assessment under various conditions of embedded fiber optics based multi-sensing materials. Opt. Fiber Technol. 2017, 36, 334–343. [Google Scholar] [CrossRef]
- Mishra, V.; Singh, N.; Tiwari, U.; Kapur, P. Fiber grating sensors in medicine: Current and emerging applications. Sens. Actuators A Phys. 2011, 167, 279–290. [Google Scholar] [CrossRef]
- Wang, H.; Song, Q.; Zhang, L.; Liu, Y. Design on the control system of a gait rehabilitation training robot based on Brain-Computer Interface and virtual reality technology. Int. J. Adv. Robot. Syst. 2012, 9, 145. [Google Scholar] [CrossRef]
- Milosevic, M.; Marquez-Chin, C.; Masani, K.; Hirata, M.; Nomura, T.; Popovic, M.R.; Nakazawa, K. Why brain-controlled neuroprosthetics matter: Mechanisms underlying electrical stimulation of muscles and nerves in rehabilitation. Biomed. Eng. Online 2020, 19, 1–30. [Google Scholar] [CrossRef]
- Batula, A.M.; Mark, J.A.; Kim, Y.E.; Ayaz, H. Comparison of Brain Activation during Motor Imagery and Motor Movement Using fNIRS. Comput. Intell. Neurosci. 2017, 2017, 5491296. [Google Scholar] [CrossRef] [PubMed]
- Zhao, M.; Marino, M.; Samogin, J.; Swinnen, S.P.; Mantini, D. Hand, foot and lip representations in primary sensorimotor cortex: A high-density electroencephalography study. Sci. Rep. 2019, 9, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Jasiewicz, B.; Klimiec, E.; Młotek, M.; Guzdek, P.; Duda, S.; Adamczyk, J.; Potaczek, T.; Piekarski, J.; Kołaszczyński, G. Quantitative analysis of foot plantar pressure during walking. Med. Sci. Monit. 2019, 25, 4916–4922. [Google Scholar] [CrossRef] [PubMed]
- Ren, B.; Liu, J. Design of a plantar pressure insole measuring system based on modular photoelectric pressure sensor unit. Sensors 2021, 21, 3780. [Google Scholar] [CrossRef]
- Tavares, C.; Domingues, M.F.; Frizera-Neto, A.; Leite, T.; Leitão, C.; Alberto, N.; Marques, C.; Radwan, A.; Rocon, E.; André, P.; et al. Gait shear and plantar pressure monitoring: A non-invasive OFS based solution for e-health architectures. Sensors 2018, 18, 1334. [Google Scholar] [CrossRef] [Green Version]
- Hessert, M.J.; Vyas, M.; Leach, J.; Hu, K.; Lipsitz, L.A.; Novak, V. Foot pressure distribution during walking in young and old adults. BMC Geriatr. 2005, 5, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Mishra, A. Wavelets—A Hidden Gem for Artificial Intelligence in Seismic Interpretations. 2020. Available online: https://www.mathworks.com/content/dam/mathworks/mathworks-dot-com/company/events/conferences/matlab-energy-conference/wavelets-a-hidden-gem-for-artificial-intelligence-in-seismic-interpretation.pdf (accessed on 23 January 2022).
- Lahmiri, S. Comparative study of ecg signal denoising by wavelet thresholding in empirical and variational mode decomposition domains. Healthc. Technol. Lett. 2014, 1, 104–109. [Google Scholar] [CrossRef] [Green Version]
- Kumar, N.; Alam, K.; Siddiqi, A.H. Wavelet transform for classification of EEG signal using SVM and ANN. Biomed. Pharmacol. J. 2017, 10, 2061–2069. [Google Scholar] [CrossRef]
- Er, Y. The Classification of White Wine and Red Wine According to Their Physicochemical Qualities. Int. J. Intell. Syst. Appl. Eng. 2016, 4, 23–26. [Google Scholar] [CrossRef]
- Mishra, A.K.; Pani, S.K.; Ratha, B.K. Decision Tree Analysis on J48 and Random Forest Algorithm for Data Mining Using Breast Cancer Microarray Dataset. Available online: http://www.ijates.com/images/short_pdf/1449290433_239D.pdf (accessed on 23 January 2022).
- Guerrero, M.C.; Parada, J.S.; Espitia, H.E. EEG signal analysis using classification techniques: Logistic regression, artificial neural networks, support vector machines, and convolutional neural networks. Heliyon 2021, 7, e07258. [Google Scholar] [CrossRef]
- Agarwal, S. Data mining: Data mining concepts and techniques. In Proceedings of the 2013 International Conference on Machine Intelligence and Research Advancement, Katra, India, 21–23 December 2013; ISBN 9780769550138. [Google Scholar]
- Verrel, J.; Almagor, E.; Schumann, F.; Lindenberger, U.; Kühn, S. Changes in neural resting state activity in primary and higher-order motor areas induced by a short sensorimotor intervention based on the Feldenkrais method. Front. Hum. Neurosci. 2015, 9, 232. [Google Scholar] [CrossRef] [Green Version]
- Manie, Y.C.; Li, J.W.; Peng, P.C.; Shiu, R.K.; Chen, Y.Y.; Hsu, Y.T. Using a machine learning algorithm integrated with data de-noising techniques to optimize the multipoint sensor network. Sensors 2020, 20, 1070. [Google Scholar] [CrossRef] [Green Version]
- Khan, H.; Naseer, N.; Yazidi, A.; Eide, P.K.; Hassan, H.W.; Mirtaheri, P. Analysis of Human Gait Using Hybrid EEG-fNIRS-Based BCI System: A Review. Front. Hum. Neurosci. 2021, 14, 605. [Google Scholar] [CrossRef]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Participant | Age | Weight (kg) | Height (m) | Foot Size (EU) |
|---|---|---|---|---|
| 1 | 23 | 102 | 1.73 | 42.5 |
| 2 | 24 | 67 | 1.77 | 42 |
| 3 | 23 | 72 | 1.80 | 43 |
| 4 | 23 | 70 | 1.70 | 41 |
| SAMPLED | PROCESSED | |||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| K-NN | SVM | Logistic Regression | Naïve Bayes | K-NN | SVM | Logistic Regression | Naïve Bayes | |||||||||||||||||||||||||
| CH | TR | VAL | T | BT | TR | VAL | T | BT | TR | VAL | T | BT | TR | VAL | T | BT | TR | VAL | T | BT | TR | VAL | T | BT | TR | VAL | T | BT | TR | VAL | T | BT |
| 1 | 1 | 0.81 | 0.75 | 0.8 | 0.87 | 0.83 | 0.75 | 0.8 | 1 | 0.59 | 0.33 | 0.37 | 0.72 | 0.73 | 0.58 | 0.5 | 1 | 0.51 | 0.33 | 0.36 | 1 | 0.41 | 0.5 | 0.56 | 1 | 0.38 | 0.25 | 0.29 | 0.81 | 0.56 | 0.67 | 0.69 |
| 2 | 0.74 | 0.74 | 0.92 | 0.92 | 0.83 | 0.78 | 0.67 | 0.61 | 1 | 0.55 | 0.25 | 0.24 | 0.74 | 0.72 | 0.66 | 0.61 | 1 | 0.45 | 0.17 | 0.22 | 1 | 0.43 | 0.25 | 0.29 | 1 | 0.45 | 0.25 | 0.25 | 0.68 | 0.55 | 0.58 | 0.6 |
| 3 | 1 | 0.68 | 0.5 | 0.54 | 0.78 | 0.78 | 0.42 | 0.4 | 1 | 0.49 | 0.42 | 0.44 | 0.7 | 0.66 | 0.58 | 0.62 | 1 | 0.51 | 0.5 | 0.58 | 1 | 0.44 | 0.42 | 0.5 | 1 | 0.38 | 0.25 | 0.33 | 0.66 | 0.51 | 0.58 | 0.6 |
| 4 | 1 | 0.59 | 0.75 | 0.78 | 0.98 | 0.73 | 0.75 | 0.69 | 1 | 0.43 | 0.33 | 0.32 | 0.55 | 0.53 | 0.5 | 0.51 | 1 | 0.49 | 0.67 | 0.67 | 1 | 0.32 | 0.67 | 0.72 | 1 | 0.25 | 0.75 | 0.78 | 0.68 | 0.62 | 0.75 | 0.67 |
| 5 | 0.81 | 0.77 | 0.83 | 0.81 | 1 | 0.28 | 0.5 | 0.54 | 1 | 0.49 | 0.33 | 0.32 | 0.68 | 0.68 | 0.67 | 0.67 | 1 | 0.38 | 0.58 | 0.53 | 1 | 0.36 | 0.67 | 0.69 | 1 | 0.32 | 0.75 | 0.76 | 0.62 | 0.47 | 0.75 | 0.75 |
| 6 | 1 | 0.53 | 0.83 | 0.85 | 1 | 0.42 | 0.42 | 0.5 | 1 | 0.45 | 0.33 | 0.36 | 0.51 | 0.51 | 0.67 | 0.6 | 1 | 0.51 | 0.33 | 0.42 | 1 | 0.47 | 0.5 | 0.58 | 1 | 0.4 | 0.42 | 0.47 | 0.74 | 0.55 | 0.83 | 0.85 |
| 7 | 1 | 0.62 | 0.58 | 0.59 | 1 | 0.36 | 0.33 | 0.37 | 1 | 0.49 | 0.33 | 0.33 | 0.64 | 0.6 | 0.67 | 0.64 | 1 | 0.45 | 0.33 | 0.42 | 1 | 0.44 | 0.25 | 0.29 | 1 | 0.44 | 0.33 | 0.37 | 0.83 | 0.55 | 0.33 | 0.31 |
| 8 | 1 | 0.51 | 0.67 | 0.67 | 1 | 0.42 | 0.42 | 0.47 | 1 | 0.38 | 0.25 | 0.28 | 0.49 | 0.49 | 0.33 | 0.32 | 1 | 0.49 | 0.25 | 0.33 | 1 | 0.34 | 0.42 | 0.47 | 1 | 0.32 | 0.42 | 0.5 | 0.83 | 0.64 | 0.5 | 0.48 |
| 9 | 1 | 0.6 | 0.92 | 0.93 | 1 | 0.33 | 0.25 | 0.3 | 1 | 0.52 | 0.58 | 0.56 | 0.55 | 0.53 | 0.58 | 0.53 | 1 | 0.49 | 0.25 | 0.24 | 1 | 0.32 | 0.25 | 0.28 | 1 | 0.29 | 0.16 | 0.19 | 0.74 | 0.53 | 0.92 | 0.92 |
| 10 | 1 | 0.54 | 0.58 | 0.59 | 1 | 0.25 | 0.33 | 0.42 | 1 | 0.62 | 0.33 | 0.39 | 0.55 | 0.56 | 0.58 | 0.61 | 1 | 0.42 | 0.25 | 0.33 | 1 | 0.3 | 0.25 | 0.33 | 1 | 0.27 | 0.33 | 0.4 | 0.79 | 0.59 | 0.42 | 0.48 |
| 11 | 1 | 0.54 | 0.5 | 0.43 | 1 | 0.33 | 0.5 | 0.57 | 1 | 0.32 | 0.33 | 0.36 | 0.55 | 0.54 | 0.67 | 0.68 | 1 | 0.47 | 0.42 | 0.5 | 1 | 0.45 | 0.58 | 0.65 | 1 | 0.29 | 0.42 | 0.46 | 0.7 | 0.53 | 0.92 | 0.92 |
| 12 | 0.74 | 0.7 | 0.5 | 0.51 | 1 | 0.47 | 0.5 | 0.58 | 1 | 0.29 | 0.33 | 0.36 | 0.57 | 0.6 | 0.42 | 0.4 | 1 | 0.56 | 0.5 | 0.58 | 1 | 0.51 | 0.5 | 0.58 | 1 | 0.42 | 0.5 | 0.58 | 0.85 | 0.7 | 0.83 | 0.87 |
| 13 | 1 | 0.47 | 0.42 | 0.47 | 1 | 0.33 | 0.25 | 0.33 | 1 | 0.4 | 0.33 | 0.39 | 0.51 | 0.48 | 0.33 | 0.33 | 1 | 0.45 | 0.5 | 0.57 | 1 | 0.36 | 0.42 | 0.47 | 1 | 0.34 | 0.33 | 0.39 | 0.55 | 0.43 | 0.42 | 0.43 |
| 14 | 1 | 0.55 | 0.67 | 0.67 | 1 | 0.28 | 0.33 | 0.4 | 1 | 0.3 | 0.08 | 0.07 | 0.51 | 0.38 | 0.33 | 0.33 | 1 | 0.43 | 0.42 | 0.48 | 1 | 0.23 | 0.33 | 0.39 | 0.96 | 0.28 | 0.58 | 0.67 | 0.83 | 0.45 | 0.33 | 0.36 |
| 15 | 1 | 0.69 | 0.67 | 0.63 | 1 | 0.42 | 0.33 | 0.42 | 1 | 0.42 | 0.33 | 0.33 | 0.57 | 0.55 | 0.42 | 0.4 | 1 | 0.43 | 0.58 | 0.66 | 1 | 0.32 | 0.5 | 0.58 | 1 | 0.28 | 0.42 | 0.5 | 0.8 | 0.49 | 0.5 | 0.51 |
| 16 | 1 | 0.59 | 0.5 | 0.51 | 1 | 0.44 | 0.42 | 0.47 | 1 | 0.48 | 0.33 | 0.33 | 0.32 | 0.73 | 0.42 | 0.33 | 1 | 0.38 | 0.42 | 0.47 | 1 | 0.41 | 0.42 | 0.47 | 1 | 0.34 | 0.25 | 0.3 | 0.77 | 0.51 | 0.5 | 0.54 |
| Avg | 0.96 | 0.621 | 0.662 | 0.669 | 0.97 | 0.47 | 0.45 | 0.49 | 1 | 0.45 | 0.33 | 0.34 | 0.57 | 0.58 | 0.53 | 0.51 | 1 | 0.46 | 0.41 | 0.46 | 1 | 0.38 | 0.43 | 0.49 | 1 | 0.34 | 0.4 | 0.45 | 0.74 | 0.54 | 0.61 | 0.62 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Butt, A.M.; Alsaffar, H.; Alshareef, M.; Qureshi, K.K. AI Prediction of Brain Signals for Human Gait Using BCI Device and FBG Based Sensorial Platform for Plantar Pressure Measurements. Sensors 2022, 22, 3085. https://doi.org/10.3390/s22083085
Butt AM, Alsaffar H, Alshareef M, Qureshi KK. AI Prediction of Brain Signals for Human Gait Using BCI Device and FBG Based Sensorial Platform for Plantar Pressure Measurements. Sensors. 2022; 22(8):3085. https://doi.org/10.3390/s22083085
Chicago/Turabian StyleButt, Asad Muhammad, Hassan Alsaffar, Muhannad Alshareef, and Khurram Karim Qureshi. 2022. "AI Prediction of Brain Signals for Human Gait Using BCI Device and FBG Based Sensorial Platform for Plantar Pressure Measurements" Sensors 22, no. 8: 3085. https://doi.org/10.3390/s22083085
APA StyleButt, A. M., Alsaffar, H., Alshareef, M., & Qureshi, K. K. (2022). AI Prediction of Brain Signals for Human Gait Using BCI Device and FBG Based Sensorial Platform for Plantar Pressure Measurements. Sensors, 22(8), 3085. https://doi.org/10.3390/s22083085