
Doppler Shift Tolerance of Typical Pseudorandom Binary Sequences in PMCW Radar

 , , , ,
, , , ,  , , , , and
, , , , and
Abstract
:1. Introduction
- An overview of typically adopted PRBSs in PMCW radar systems, namely m-sequences, Gold sequences, Kasami sequences, almost perfect autocorrelation sequences (APASs), zero correlation zone (ZCZ) sequences, and Golay sequences, and their implications on range and velocity ambiguities for different PRBS lengths. For the aforementioned analyses, an automotive ( bandwidth and carrier frequency) and a gesture recognition application ( bandwidth and carrier frequency) were considered. For the Golay sequences, both the use of complementary pairs and the use of a single Golay sequence as a variation of ZCZ sequences, which to the best of the authors’ knowledge has not been previously reported in PMCW radar literature, are adressed.
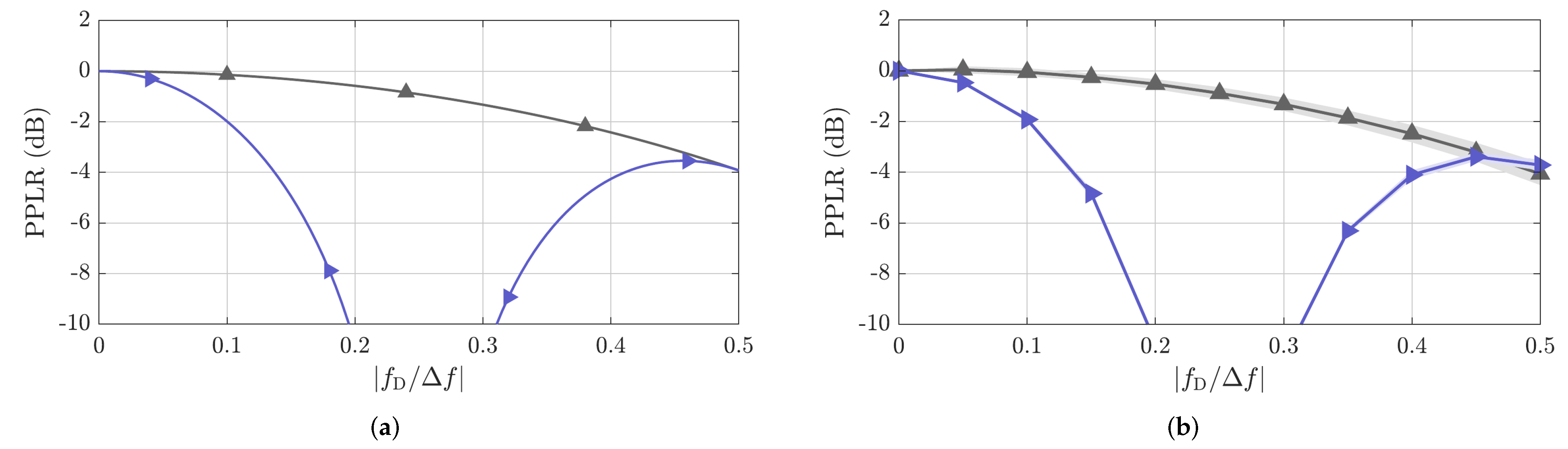
- An analysis of the Doppler shift tolerance of the oversampled PACFs of the aforementioned PRBSs for different sequence lengths. For this analysis, a normalized Doppler shift parameter introduced in a previous article [23] was adopted and sequences that achieve similar maximum unambiguous range were compared by using peak power loss ratio (PPLR), peak sidelobe level ratio (PSLR), and integrated-sidelobe level ratio (ISLR) as metrics.
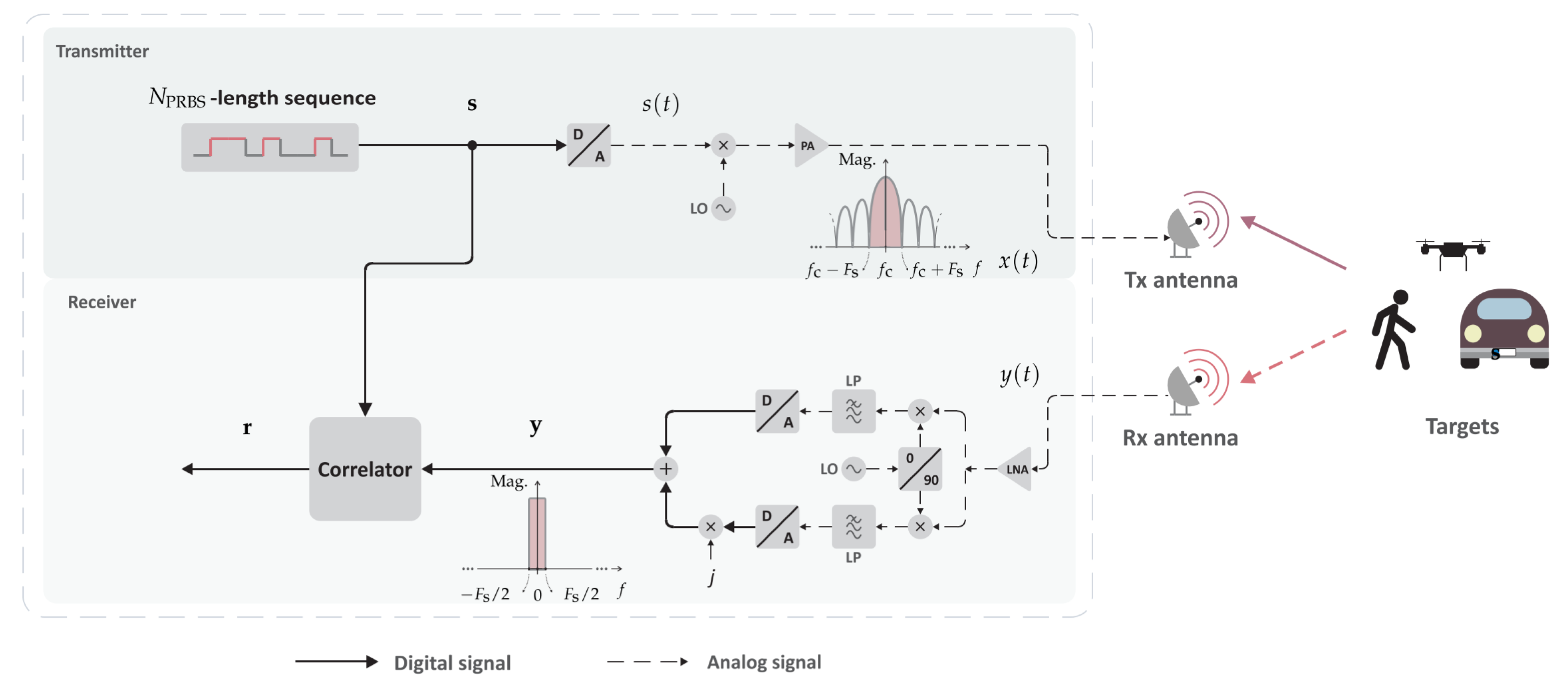
2. System Model
3. Metrics for Assessing Doppler-Shift-Induced Range Profile Distortion


4. Comparative Performance Analysis
4.1. Investigated Pseudorandom Binary Sequences
4.1.1. m-Sequences
4.1.2. Gold and Kasami Sequences
4.1.3. Almost Perfect Autocorrelation Sequences
4.1.4. Zero Correlation Zone Sequences
4.1.5. Golay Sequences
4.1.6. Parameterization Examples for the Investigated Pseudorandom Binary Sequences
4.2. Evaluation of Doppler Shift Distortion of Range Profiles
4.2.1. Peak Power Loss Ratio
4.2.2. Peak-to-Sidelobe Level Ratio
4.2.3. Integrated-Sidelobe Level Ratio
4.2.4. Additional Remarks
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hakobyan, G.; Yang, B. High-Performance Automotive Radar: A Review of Signal Processing Algorithms and Modulation Schemes. IEEE Signal Process. Mag. 2019, 36, 32–44. [Google Scholar] [CrossRef]
- Roos, F.; Bechter, J.; Knill, C.; Schweizer, B.; Waldschmidt, C. Radar Sensors for Autonomous Driving: Modulation Schemes and Interference Mitigation. IEEE Microw. Mag. 2019, 20, 58–72. [Google Scholar] [CrossRef] [Green Version]
- Waldschmidt, C.; Hasch, J.; Menzel, W. Automotive Radar—From First Efforts to Future Systems. IEEE J. Microw. 2021, 1, 135–148. [Google Scholar] [CrossRef]
- Davis, C.; Hegde, M.; Stark, W.E.; Eshraghi, A.; Goldenberg, M.; Ali, M. Vehicle Radar System with a Shared Radar and Communication System. Patent Application No. WO 2017/187331 A1, 2 November 2017. [Google Scholar]
- Dokhanchi, S.H.; Shankar, M.R.B.; Nijsure, Y.A.; Stifter, T.; Sedighi, S.; Ottersten, B. Joint automotive radar-communications waveform design. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Dokhanchi, S.H.; Mysore, B.S.; Mishra, K.V.; Ottersten, B. A mmWave Automotive Joint Radar-Communications System. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1241–1260. [Google Scholar] [CrossRef]
- Mishra, K.V.; Bhavani Shankar, M.R.; Koivunen, V.; Ottersten, B.; Vorobyov, S.A. Toward Millimeter-Wave Joint Radar Communications: A Signal Processing Perspective. IEEE Signal Process. Mag. 2019, 36, 100–114. [Google Scholar] [CrossRef] [Green Version]
- Giroto de Oliveira, L.; Nuss, B.; Alabd, M.B.; Diewald, A.; Pauli, M.; Zwick, T. Joint Radar-Communication Systems: Modulation Schemes and System Design. IEEE Trans. Microw. Theory Tech. 2022, 70, 1521–1551. [Google Scholar] [CrossRef]
- Sturm, C.; Zwick, T.; Wiesbeck, W. An OFDM System Concept for Joint Radar and Communications Operations. In Proceedings of the VTC Spring 2009—IEEE 69th Vehicular Technology Conference, Barcelona, Spain, 26–29 April 2009; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Sit, Y.L.; Nuss, B.; Zwick, T. On Mutual Interference Cancellation in a MIMO OFDM Multiuser Radar-Communication Network. IEEE Trans. Veh. Technol. 2018, 67, 3339–3348. [Google Scholar] [CrossRef]
- Giroto de Oliveira, L.; Alabd, M.B.; Nuss, B.; Zwick, T. An OCDM Radar-Communication System. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Giroto de Oliveira, L.; Nuss, B.; Alabd, M.B.; Li, Y.; Yu, L.; Zwick, T. MIMO-OCDM-Based Joint Radar Sensing and Communication. In Proceedings of the 2021 15th European Conference on Antennas and Propagation (EuCAP), Dusseldorf, Germany, 22–26 March 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Schweizer, B.; Grathwohl, A.; Rossi, G.; Hinz, P.; Knill, C.; Stephany, S.; Ng, H.J.; Waldschmidt, C. The Fairy Tale of Simple All-Digital Radars: How to Deal With 100 Gbit/s of a Digital Millimeter-Wave MIMO Radar on an FPGA [Application Notes]. IEEE Microw. Mag. 2021, 22, 66–76. [Google Scholar] [CrossRef]
- Giannini, V.; Guermandi, D.; Shi, Q.; Medra, A.; Thillo, W.V.; Bourdoux, A.; Wambacq, P. A 79 GHz Phase-Modulated 4 GHz-BW CW Radar Transmitter in 28 nm CMOS. IEEE J. Solid-State Circuits 2014, 49, 2925–2937. [Google Scholar] [CrossRef]
- Guermandi, D.; Shi, Q.; Dewilde, A.; Derudder, V.; Ahmad, U.; Spagnolo, A.; Ocket, I.; Bourdoux, A.; Wambacq, P.; Craninckx, J.; et al. A 79-GHz 2 × 2 MIMO PMCW Radar SoC in 28-nm CMOS. IEEE J. Solid-State Circuits 2017, 52, 2613–2626. [Google Scholar] [CrossRef]
- Wambacq, P.; Guermandi, D.; Bourdoux, A.; Craninckx, J. Millimeter-Wave Radar SoC Integration in CMOS. In Millimeter-Wave Circuits for 5G and Radar; Hueber, G., Niknejad, A.M., Eds.; The Cambridge RF and Microwave Engineering Series; Cambridge University Press: Cambridge, UK, 2019; Chapter 7; pp. 162–192. [Google Scholar]
- Overdevest, J.; Jansen, F.; Uysal, F.; Yarovoy, A. Doppler Influence on Waveform Orthogonality in 79 GHz MIMO Phase-Coded Automotive Radar. IEEE Trans. Veh. Technol. 2020, 69, 16–25. [Google Scholar] [CrossRef] [Green Version]
- Bourdoux, A.; Ahmad, U.; Guermandi, D.; Brebels, S.; Dewilde, A.; Van Thillo, W. PMCW waveform and MIMO technique for a 79 GHz CMOS automotive radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Nuss, B.; Sit, L.; Fennel, M.; Mayer, J.; Mahler, T.; Zwick, T. MIMO OFDM radar system for drone detection. In Proceedings of the 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; pp. 1–9. [Google Scholar] [CrossRef]
- Vasanelli, C.; Roos, F.; Durr, A.; Schlichenmaier, J.; Hugler, P.; Meinecke, B.; Steiner, M.; Waldschmidt, C. Calibration and Direction-of-Arrival Estimation of Millimeter-Wave Radars: A Practical Introduction. IEEE Antennas Propagat. Mag. 2020, 62, 34–45. [Google Scholar] [CrossRef]
- Chen, Y.; Lin, R.; Li, J. Efficient Long Periodic Binary Sequence Designs for Automotive Radar. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2021), Toronto, ON, Canada, 6–11 June 2021; pp. 8388–8392. [Google Scholar] [CrossRef]
- Lellouch, G.; Mishra, A.K.; Inggs, M. Design of OFDM radar pulses using genetic algorithm based techniques. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1953–1966. [Google Scholar] [CrossRef] [Green Version]
- Giroto de Oliveira, L.; Bekker, E.; Bhutani, A.; Diewald, A.; Nuss, B.; Antes, T.; Zwick, T. Doppler Shift Tolerance of Accumulation and Outer Coding in MIMO-PMCW Radar. IEEE Microw. Wirel. Compon. Lett. 2022, 32, 257–260. [Google Scholar] [CrossRef]
- Nuss, B.; Mayer, J.; Zwick, T. Limitations of MIMO and Multi-User Access for OFDM Radar in Automotive Applications. In Proceedings of the 2018 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Munich, Germany, 15–17 April 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Zierler, N. Linear Recurring Sequences. J. Soc. Ind. Appl. Math. 1959, 7, 31–48. [Google Scholar] [CrossRef]
- Golomb, S.W. Shift Register Sequences, 3rd revised ed.; World Scientific: Singapore, 2017. [Google Scholar] [CrossRef] [Green Version]
- Gold, R. Characteristic Linear Sequences and Their Coset Functions. SIAM J. Appl. Math. 1966, 14, 980–985. [Google Scholar] [CrossRef]
- Gold, R. Maximal recursive sequences with 3-valued recursive cross-correlation functions (Corresp.). IEEE Trans. Inf. Theory 1968, 14, 154–156. [Google Scholar] [CrossRef]
- Kasami, T. Weight Distribution Formula for Some Class of Cyclic Codes; Report No. r-285; Coordinated Science Laboratory, University of Illinois: Urbana, IL, USA, 1966. [Google Scholar]
- Tasheva, A.T.; Tasheva, Z.N.; Milev, A.P. Generalization of the self-shrinking generator in the Galois field GF(pn). Adv. Artif. Intell. 2011, 2011, 464971. [Google Scholar] [CrossRef] [Green Version]
- Pott, A.; Bradley, S. Existence and nonexistence of almost-perfect autocorrelation sequences. IEEE Trans. Inf. Theory 1995, 41, 301–304. [Google Scholar] [CrossRef]
- Van Thillo, W.; Gioffré, P.; Giannini, V.; Guermandi, D.; Brebels, S.; Bourdoux, A. Almost perfect auto-correlation sequences for binary phase-modulated continuous wave radar. In Proceedings of the 2013 European Radar Conference, Nuremberg, Germany, 9–11 October 2013; pp. 491–494. [Google Scholar]
- Benattou, F.; Djebbari, A.; Taleb-Ahmed, A.; Dayoub, I. A New Class of Binary Zero Correlation Zone Sequence Sets. IOSR J. Electron. Commun. Eng. 2013, 5, 15–19. [Google Scholar]
- Golay, M. Complementary series. IRE Trans. Inf. Theory 1961, 7, 82–87. [Google Scholar] [CrossRef]
- Sturm, C.; Wiesbeck, W. Waveform Design and Signal Processing Aspects for Fusion of Wireless Communications and Radar Sensing. Proc. IEEE 2011, 99, 1236–1259. [Google Scholar] [CrossRef]
- Diewald, A.; Antes, T.; Nuss, B.; Zwick, T. Implementation of Range Doppler Migration Synthesis for Radar Target Simulation. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Diewald, A.; Antes, T.; Nuss, B.; Pauli, M.; Zwick, T. Range Doppler Migration Synthesis for Realistic Radar Target Simulation. In Proceedings of the 2021 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNeT), San Diego, CA, USA, 17–20 January 2021; pp. 56–58. [Google Scholar] [CrossRef]
- Diewald, A.; Kurz, C.; Kannan, P.V.; Giessler, M.; Pauli, M.; Göttel, B.; Kayser, T.; Gauterin, F.; Zwick, T. Radar Target Simulation for Vehicle-in-the-Loop Testing. Vehicles 2021, 3, 257–271. [Google Scholar] [CrossRef]
- Diewald, A.; Nuss, B.; Pauli, M.; Zwick, T. Arbitrary Angle of Arrival in Radar Target Simulation. IEEE Trans. Microw. Theory Tech. 2021, 70, 513–520. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | ||
|---|---|---|
| m-sequence | 255 | 255 |
| 511 | 511 | |
| 1023 | 1023 | |
| 2047 | 2047 | |
| 4095 | 4095 | |
| Gold | 255 | 255 |
| 511 | 511 | |
| 1023 | 1023 | |
| 2047 | 2047 | |
| 4095 | 4095 | |
| Kasami | 255 | 255 |
| 1023 | 1023 | |
| 4095 | 4095 | |
| APAS | 256 | 127 |
| 512 | 251 | |
| 1020 | 509 | |
| 2044 | 1021 | |
| 4008 | 2003 | |
| ZCZ | 256 | 32 |
| 512 | 64 | |
| 1024 | 128 | |
| 2048 | 256 | |
| 4096 | 512 | |
| Golay A or Golay B | 256 | 64 |
| 512 | 128 | |
| 1024 | 256 | |
| 2048 | 512 | |
| 4096 | 1024 | |
| Combined Golay A and B | 256 | 256 |
| 512 | 512 | |
| 1024 | 1024 | |
| 2048 | 2048 | |
| 4096 | 4096 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giroto de Oliveira, L.; Antes, T.; Nuss, B.; Bekker, E.; Bhutani, A.; Diewald, A.; Alabd, M.B.; Li, Y.; Pauli, M.; Zwick, T. Doppler Shift Tolerance of Typical Pseudorandom Binary Sequences in PMCW Radar. Sensors 2022, 22, 3212. https://doi.org/10.3390/s22093212
Giroto de Oliveira L, Antes T, Nuss B, Bekker E, Bhutani A, Diewald A, Alabd MB, Li Y, Pauli M, Zwick T. Doppler Shift Tolerance of Typical Pseudorandom Binary Sequences in PMCW Radar. Sensors. 2022; 22(9):3212. https://doi.org/10.3390/s22093212
Chicago/Turabian StyleGiroto de Oliveira, Lucas, Theresa Antes, Benjamin Nuss, Elizabeth Bekker, Akanksha Bhutani, Axel Diewald, Mohamad Basim Alabd, Yueheng Li, Mario Pauli, and Thomas Zwick. 2022. "Doppler Shift Tolerance of Typical Pseudorandom Binary Sequences in PMCW Radar" Sensors 22, no. 9: 3212. https://doi.org/10.3390/s22093212
APA StyleGiroto de Oliveira, L., Antes, T., Nuss, B., Bekker, E., Bhutani, A., Diewald, A., Alabd, M. B., Li, Y., Pauli, M., & Zwick, T. (2022). Doppler Shift Tolerance of Typical Pseudorandom Binary Sequences in PMCW Radar. Sensors, 22(9), 3212. https://doi.org/10.3390/s22093212