
Simu2VITA: A General Purpose Underwater Vehicle Simulator

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Overall design simple and easy to understand, implicitly implying low structure complexity to configure an experiment.
- Easy description and modification of the vehicle physical parameters, its actuators and its sensors.
- Rapid testing of the different types of speed and position controllers.
- Simple to add features on top of it such as vehicle autonomous behaviors.
- Dynamic model completeness.
- Section 2 discuss popular UUV simulators and their main characteristics.
- Section 3 presents our simulator Simu2VITA and the considerations taken in its implementation. In addition to the presentation of the internal design functioning of Simu2VITA, this section also provides an overview on the modeling of a rigid-body vehicle and its actuators.
- Section 4 presents the simulation results for a UUV navigating inside a fully flooded tunnel and a qualitative comparison of these results with sensor data collected when the real vehicle performed the same mission, showing that Simu2VITA can be used for fast concept validation.
- Section 5 highlights the main points of the article and presents some possible future improvements for this work.
2. Background
3. The Simu2VITA Simulator
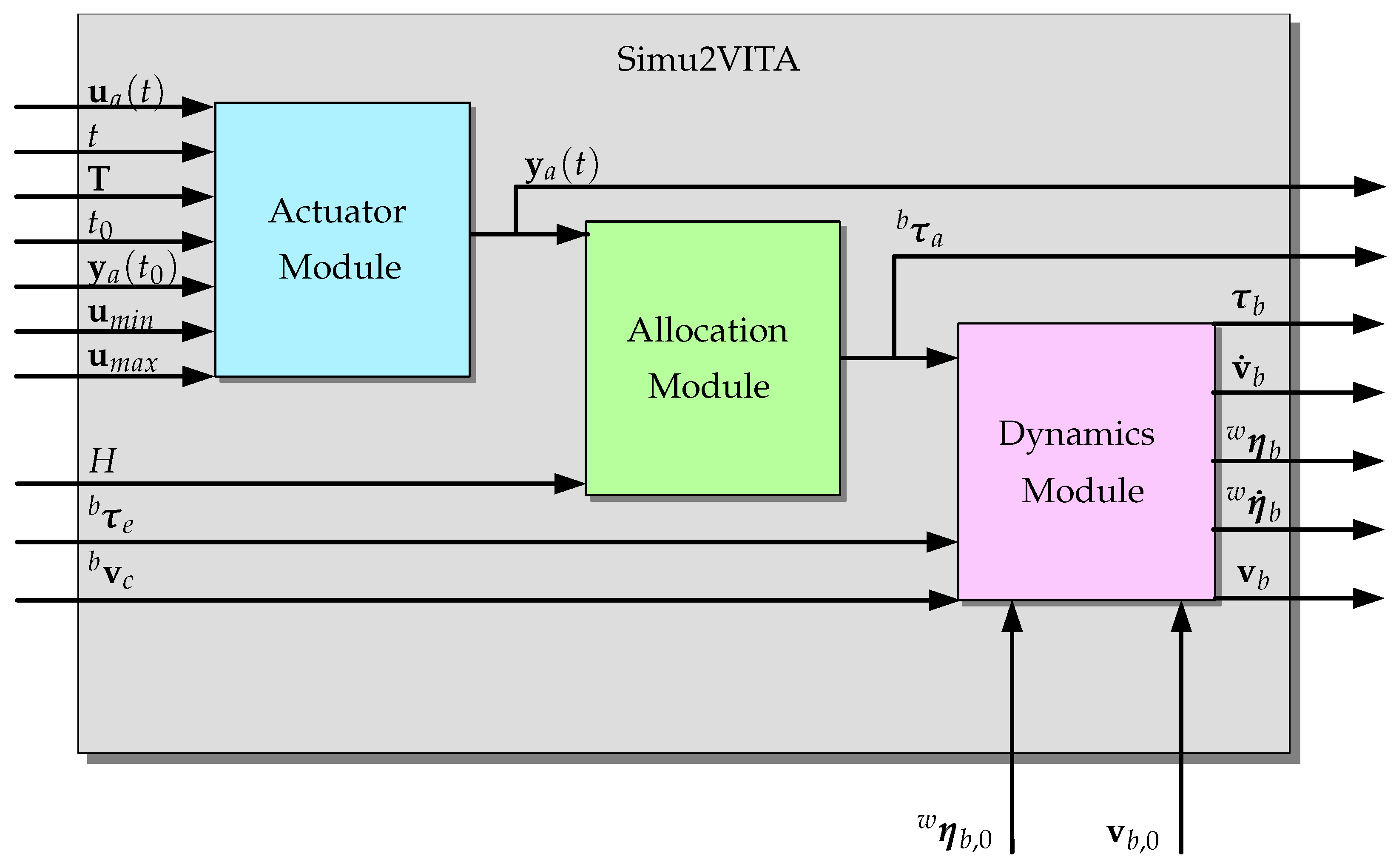
3.1. Simulator Description
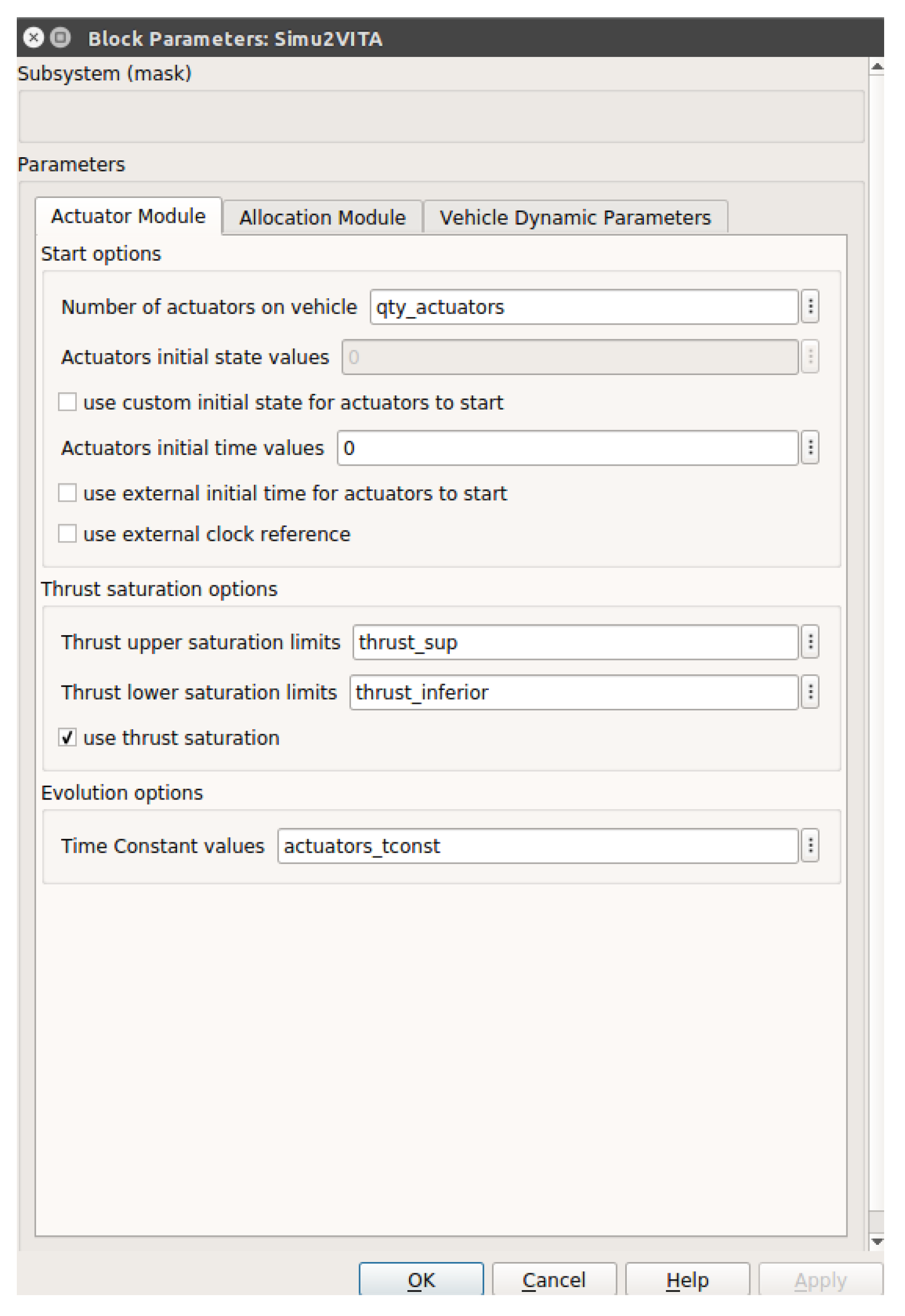
- The Actuator Module implements the dynamic model of the actuators using for each of them an input signal saturation followed by a simple first-order system. Actuator inputs are handled by this module.
- The Allocation Module describes how the forces generated by the vehicle actuators are mapped into forces and torques acting on the body of the vehicle.
- The Dynamics Module has two main software components: the kinematics component that treats only geometrical aspects of the vehicle motion, and the kinetics component, which deals with the effect of forces and torques applied to the body of the vehicle.
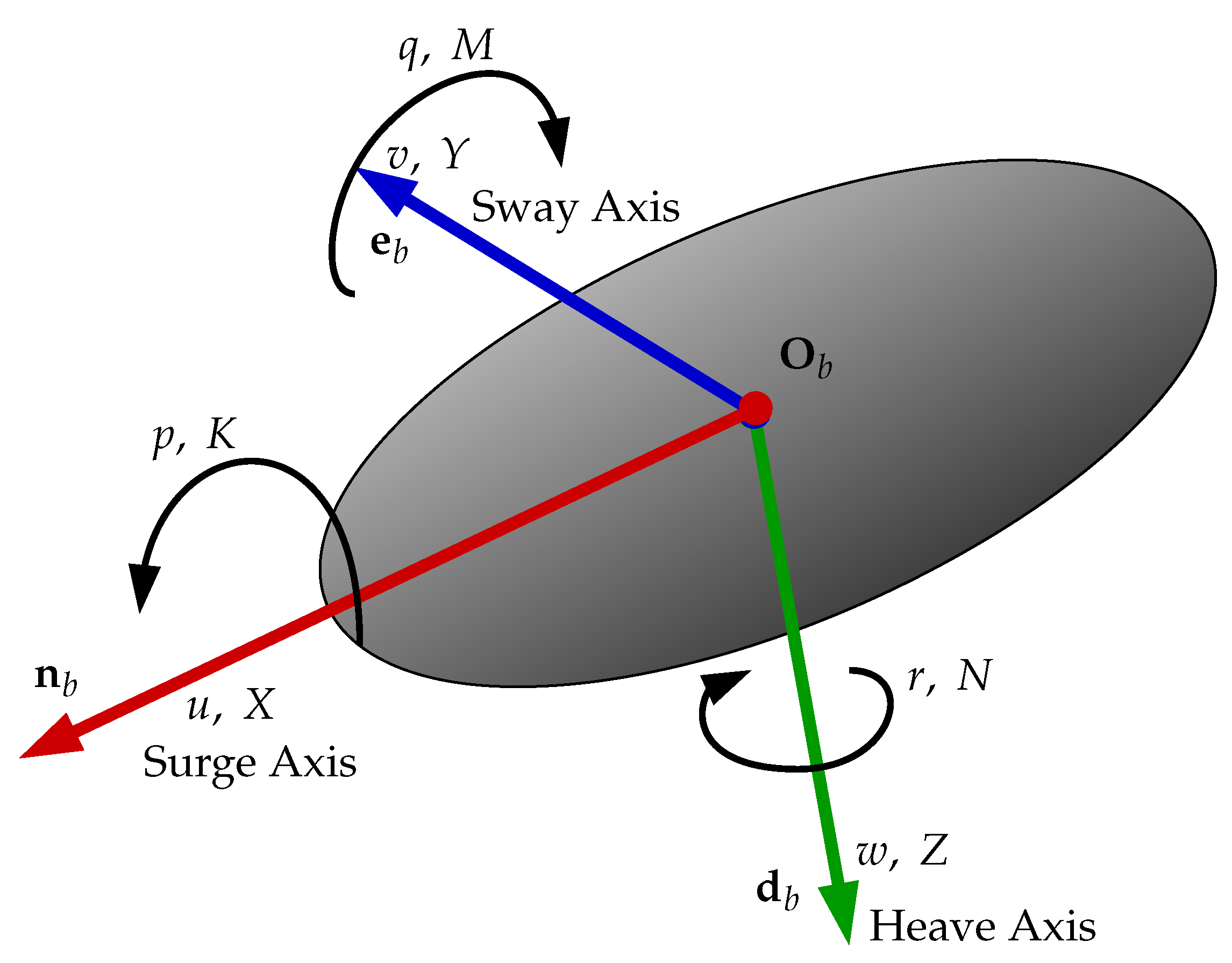
- for the forward pointing axis in red;
- for the axis normal to the sagital plane of the vehicle in blue;
- and for the axis pointing down in green.
3.1.1. The Dynamics Module-Kinematics Component
- 1
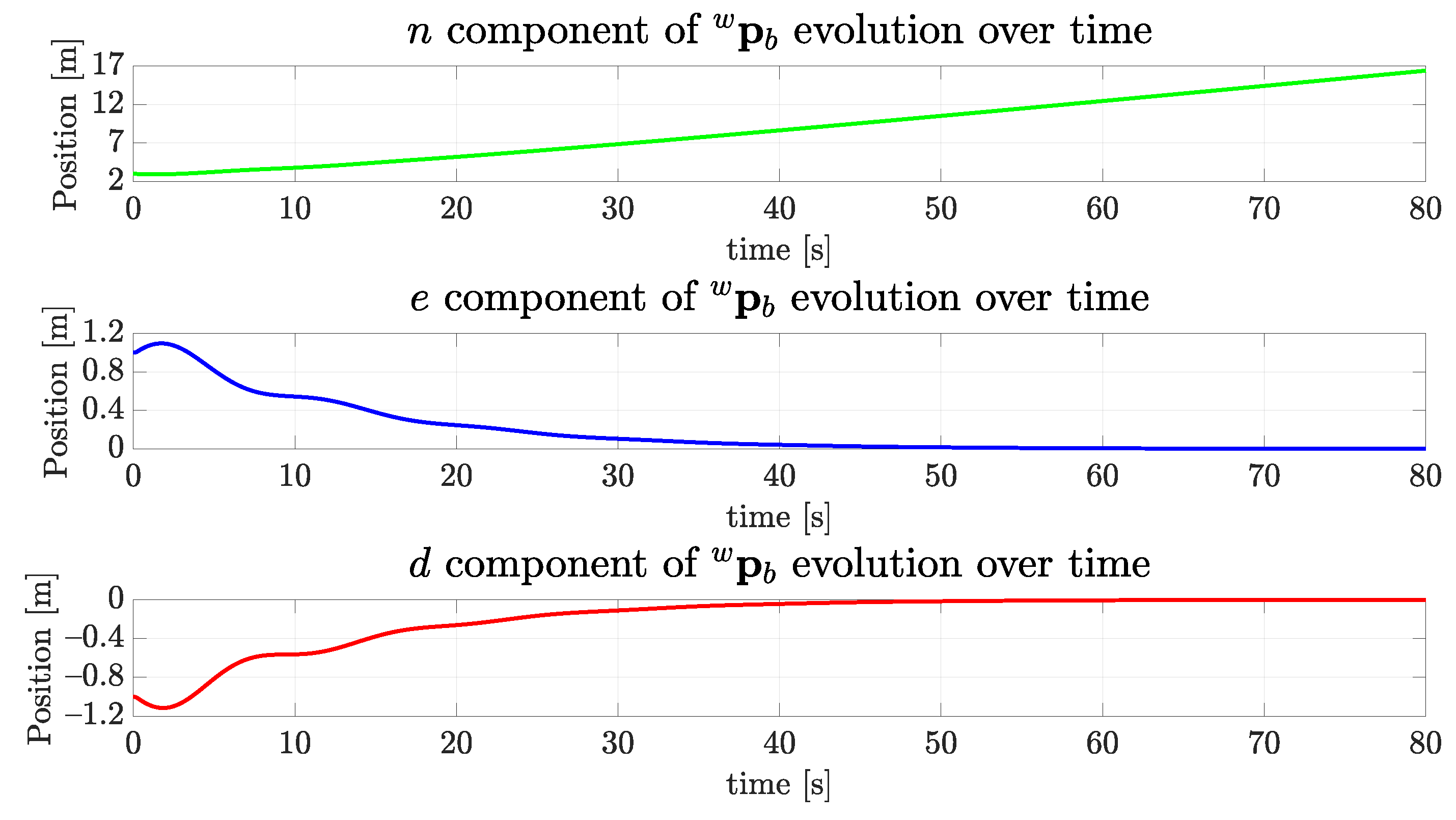
- The pose of the vehicle written with respect to (w.r.t.) the frame,where is the position and is a unit quaternion [16] describing the orientation of the vehicle with respect to . In addition, , where n, e and d are the three Euclidean components in the frame. The quaternion has its real part as its first component and the imaginary part encapsulated in . Notice that quaternion vector can be interpreted as “orientation of frame in respect to frame ”.
- 2
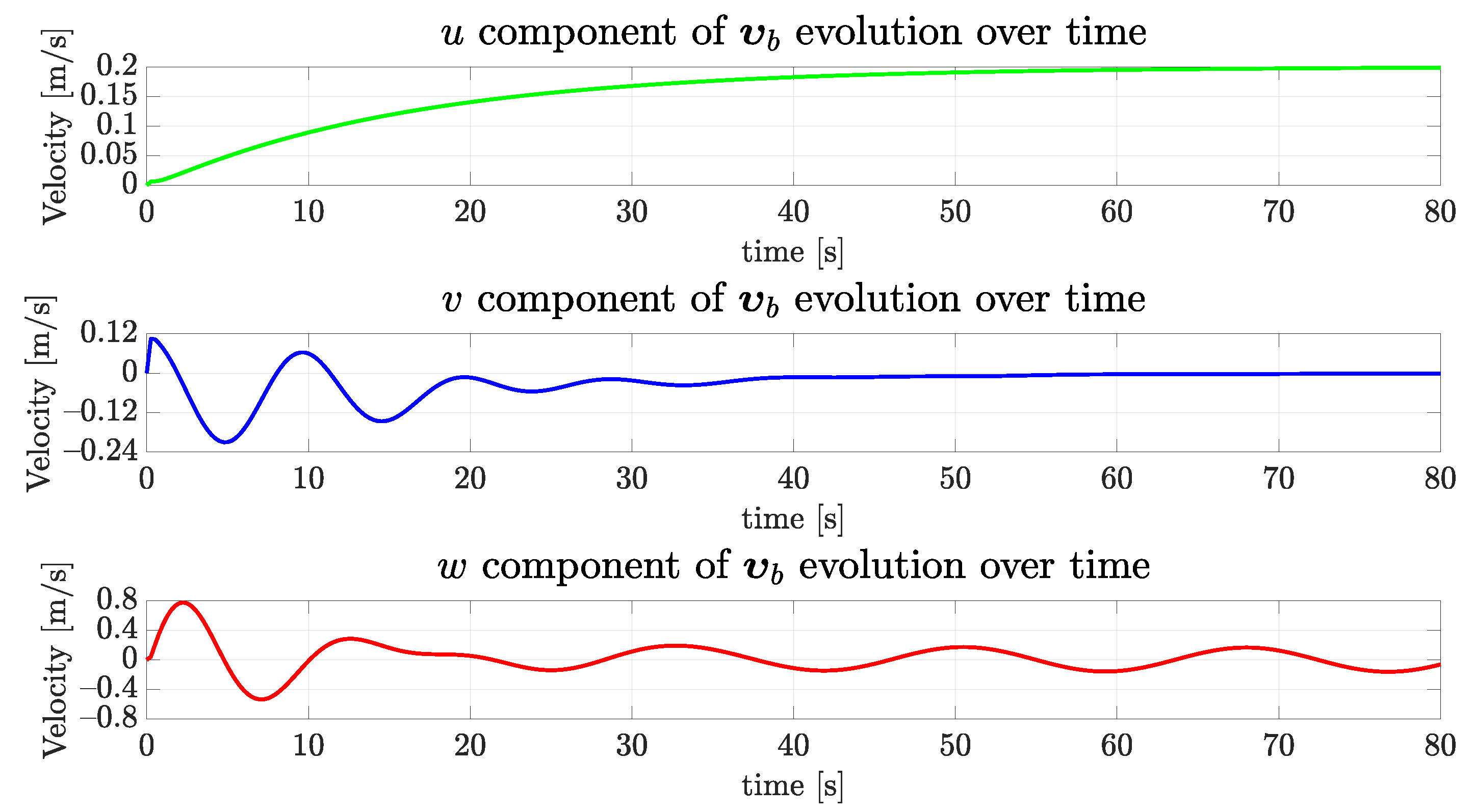
- The linear and angular velocities w.r.t. the vehicle’s own body frame
3.1.2. The Dynamics Module-Kinetics Component
- is the acceleration vector of the vehicle.
- is the relative velocity of the vehicle when accounting for constant water currents ,withwhere , , are, respectively, the components of the water current velocity in Surge, Sway and Heave.
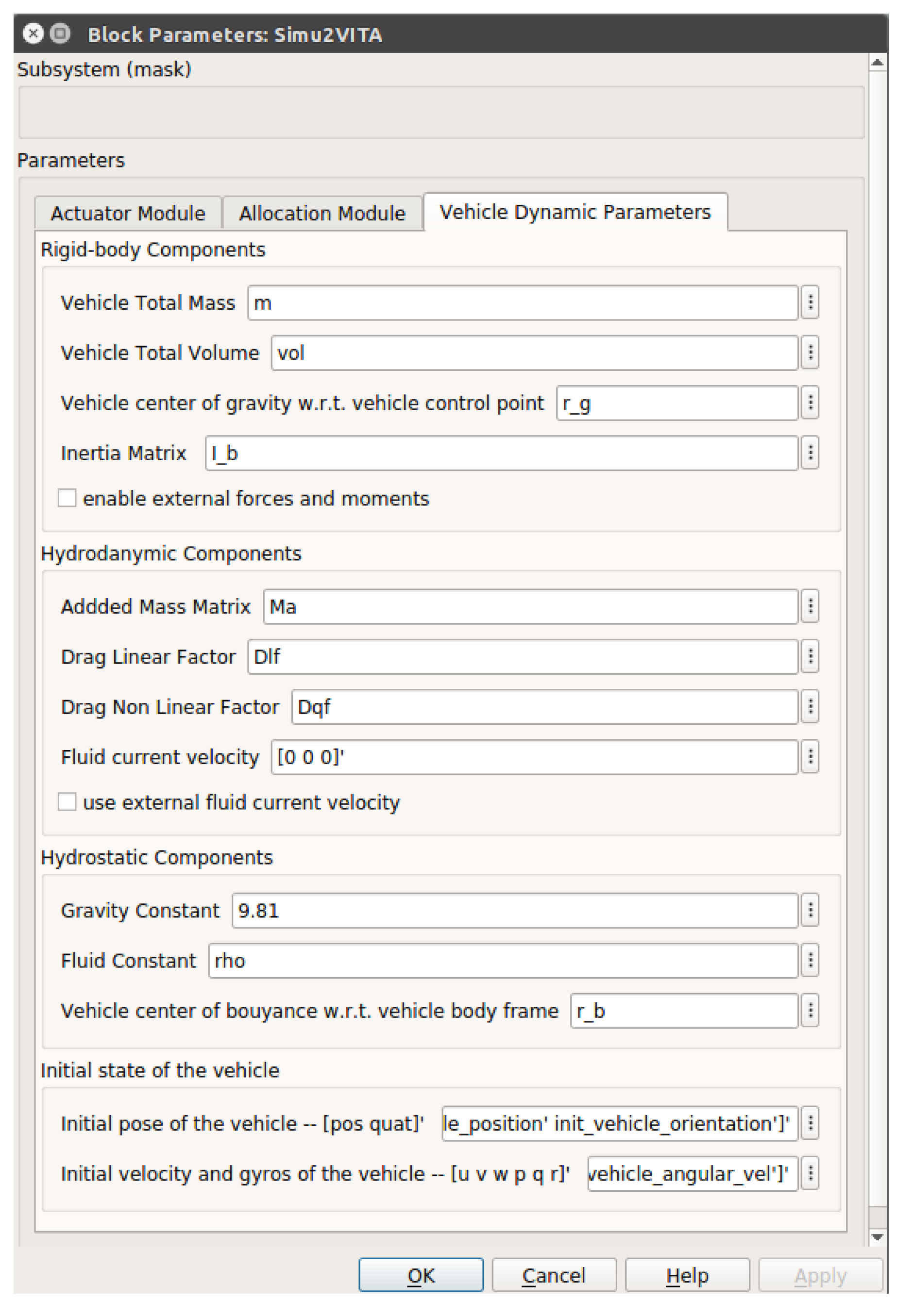
- Matrix M is the rigid body Inertia Matrix and can be derived using Newton–Euler equations of motion. Here, M is defined using an arbitrary point in the body of the vehicle as the origin for frame and has the structureVector describes the displacement of the center of gravity of the vehicle w.r.t. , and it shall be informed when using the simulator. The scalar m is the mass of the vehicle. Matrix is the Inertia Matrix defined around the origin of . One possibility to obtain the value of is to first obtain the Inertia Matrix around and perform
- C is the Coriolis–Centripetal Matrix, and the form used here can be found using Newton–Euler method,
- is the Added-Mass Matrix, which accounts for the extra inertia added to the system because of the water volume the accelerating vehicle must displace in order to move through it. The information of the shape of the vehicle is embedded in this matrix [4]. This matrix is normally computed using an auxiliary numeric modeling software [18].
- is the Hydrodynamic Coriolis–Centripetal Matrix and has the following form
- D is the Hydrodynamic Damping Matrix, which is simplified in our model. Here, we assume the vehicle to perform relatively decoupled movements in each direction resulting in diagonal matrices for the linear and non-linear diagonal dumping.
- Vector accounts for the static and hydrostatic forces acting on fully submerged vehicles, meaning gravitational force and buoyancy force , with and . Scalar g is gravity acceleration, is the water density and ∇ is the volume displaced by the vehicle. Finally,and observe that is the center of buoyancy in the body of the vehicle.
- is the vector of disturbing forces and torques applied to the vehicle in each axis of the body frame, including those generated by the actuators. We divide this vector into two main components as described in Equation (18)where X, Y and Z are forces applied into the Surge, Sway and Heave Axis, respectively. Torques are K, M and N following roll, pitch and yaw movements, respectively. See Figure 2, with encapsulating any external forces and torques from any source and coming from the actuators.
3.1.3. The Allocation Module
3.1.4. The Actuator Module
4. Experiments
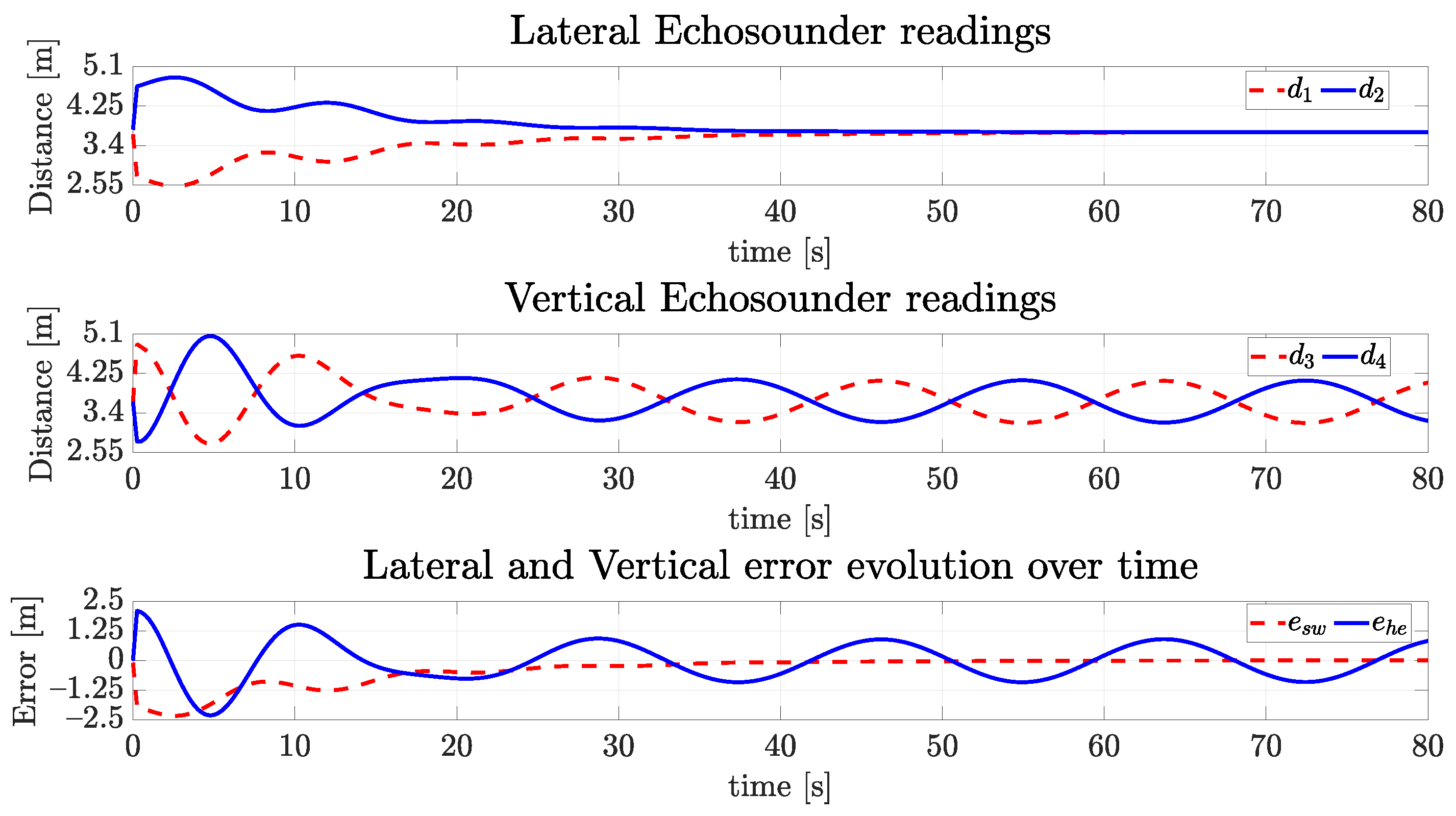
4.1. Simulated Experiments
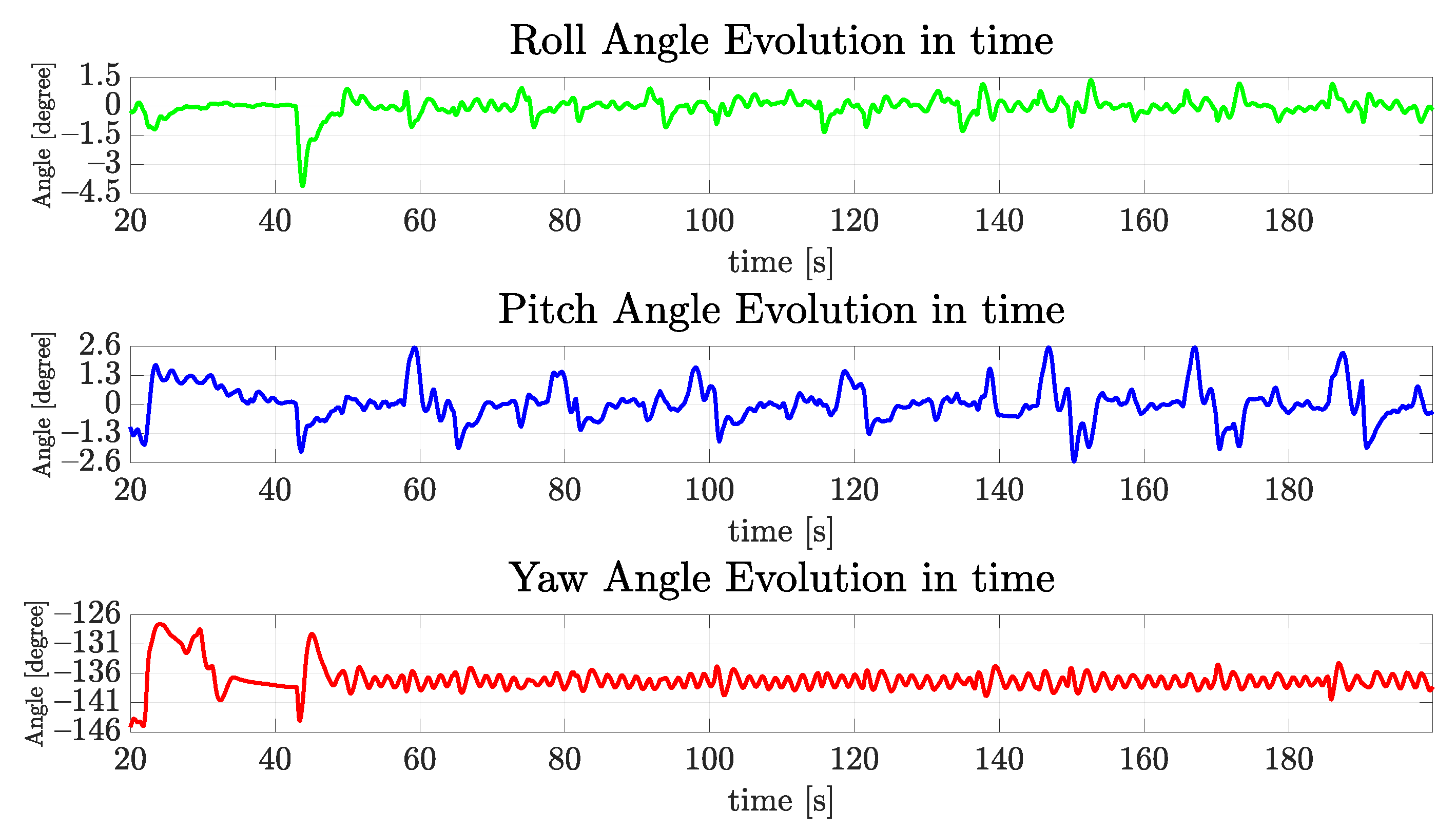
4.2. Real Experiment
- The controller compensating non-linear terms of the vehicle dynamics is a cascade PID running at 400 Hz on the micro-controller PixHawk [30] using readings from its own internal accelerometers and gyrometers;
- The orientation controllers operate separately in each angular degree of freedom also using a cascade PID inside PixHawk, while the simulated vehicle used a composed orientation controller in quaternion form.
5. Conclusions and Future Works
- Our simulator uses an added matrix to enhance the simulation accuracy;
- Our user interface takes away the laborious work of searching through a myriad of files to enter the simulation information and concentrates these parameters to the user in a simple menu. No need for text editing.
- Inherits the easy prototyping aspect of Simulink® and makes controller design quick by using visual tools.
- No joint configuration is needed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Simu2VITA Block on SIMULINK
- Input init_actuator_time,
- Input simulation_time, and
- Output vehicle_resultant_forces.




References
- Koenig, N.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar] [CrossRef] [Green Version]
- Michel, O. Webots: Professional Mobile Robot Simulation. J. Adv. Robot. Syst. 2004, 1, 39–42. [Google Scholar] [CrossRef] [Green Version]
- Rohmer, E.; Singh, S.P.N.; Freese, M. V-REP: A Versatile and Scalable Robot Simulation Framework. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 1321–1326. [Google Scholar] [CrossRef]
- Weißmann, S.; Pinkall, U. Underwater rigid body dynamics. ACM Trans. Graph. (TOG) 2012, 31, 104. [Google Scholar] [CrossRef]
- Gazebo, an Open Source Robotics Foundation Simulator. Simulation Description Format (SDF). Available online: http://sdformat.org/ (accessed on 12 April 2022).
- Robot Operating System—ROS, an Open Source Robotics Foundation Software Development Kit. Unified Robot Description Format (URDF). Available online: https://wiki.ros.org/urdf (accessed on 12 April 2022).
- Haidu, A.; Hsu, J. Fluids. 2014. Available online: https://gazebosim.org/tutorials?tut=fluids&cat=physics (accessed on 12 April 2022).
- Haidu, A.; Hsu, J. Bouyancy. 2014. Available online: https://gazebosim.org/tutorials?tut=hydrodynamics&cat=physics (accessed on 12 April 2022).
- Open Source Robotics Foundation. Aerodynamics. 2014. Available online: http://gazebosim.org/tutorials?tut=aerodynamics&cat=physics (accessed on 12 April 2022).
- McQueen, C. Orca3. Available online: https://github.com/clydemcqueen/orca3 (accessed on 12 April 2022).
- Manhães, M.M.M.; Scherer, S.A.; Voss, M.; Douat, L.R.; Rauschenbach, T. UUV Simulator: A Gazebo-based package for underwater intervention and multi-robot simulation. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–8. [Google Scholar] [CrossRef]
- CMLabs. Theory Guide: Vortex Software’s Multibody Dynamics Engine. Available online: https://www.cm-labs.com/vortexstudiodocumentation/Vortex_User_Documentation/Content/Concepts/Vortex_Dynamics_Theory_final.pdf (accessed on 12 April 2022).
- Lu, W.; Liu, D. A Frequency-Limited Adaptive Controller for Underwater Vehicle-Manipulator Systems Under Large Wave Disturbances. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 246–251. [Google Scholar] [CrossRef]
- Collins, J.; Chand, S.; Vanderkop, A.; Howard, D. A review of physics simulators for robotic applications. IEEE Access 2021, 9, 51416–51431. [Google Scholar] [CrossRef]
- The Society of Naval Architecture and Marine Engineers. Nomenclature for Treating the Motion of a Submerged Body through a Fluid; Technical and Research Bulletin No. 1–5; The Society of Naval Architecture and Marine Engineers: New York, NY, USA, 1950. [Google Scholar]
- Hart, J.C.; Francis, G.K.; Kauffman, L.H. Visualizing Quaternion Rotation. ACM Trans. Graph. 1994, 13, 256–276. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Chichester, UK, 2011. [Google Scholar]
- Dukan, F. ROV Motion Control Systems. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2014. [Google Scholar]
- Wehbe, B.; Krell, M.M. Learning coupled dynamic models of underwater vehicles using support vector regression. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Karras, G.C.; Bechlioulis, C.P.; Leonetti, M.; Palomeras, N.; Kormushev, P.; Kyriakopoulos, K.J.; Caldwell, D.G. On-line identification of autonomous underwater vehicles through global derivative-free optimization. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3859–3864. [Google Scholar] [CrossRef] [Green Version]
- Jorge, V.A.M.; Gava, P.D.d.C.; Silva, J.R.B.F.; Mancilha, T.M.; Vieira, W.; Adabo, G.J.; Nascimento, C.L., Jr. VITA1: An Unmanned Underwater Vehicle Prototype for Operation in Underwater Tunnels. In Proceedings of the 2021 IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 15 April–15 May 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Blue Robotics Inc. BlueROV2 Heavy Configuration Retrofit Kit. SKU: BROV2-HEAVY-RETROFIT-R2-RP. Available online: https://bluerobotics.com/store/rov/bluerov2-upgrade-kits/brov2-heavy-retrofit-r1-rp/ (accessed on 12 April 2022).
- Wu, C.J. 6-Dof Modelling and Control of a Remotely Operated Vehicle. Ph.D. Thesis, College of Science and Engineering, Flinders University, Adelaide, Australia, 2018. [Google Scholar]
- Blue Robotics Inc. Ping Sonar Altimeter and Echosounder. SKU: PING-SONAR-R3-RP. Available online: https://bluerobotics.com/store/sensors-sonars-cameras/sonar/ping-sonar-r2-rp/ (accessed on 12 April 2022).
- Tritech International Limited. Gemini 720im Multibeam Sonar. Available online: https://www.tritech.co.uk/product/gemini-720im (accessed on 12 April 2022).
- Imagenex Technology Corp. 881L Profiling–Digital Multi-Frequency Profiling Sonar. Available online: https://imagenex.com/products/881l-profiling (accessed on 12 April 2022).
- Blue Robotics Inc. Low-Light HD USB Camera. SKU: CAM-USB-WIDE-R1-RP. Available online: https://bluerobotics.com/store/sensors-sonars-cameras/cameras/cam-usb-low-light-r1/ (accessed on 12 April 2022).
- Fresk, E.; Nikolakopoulos, G. Full quaternion based attitude control for a quadrotor. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 3864–3869. [Google Scholar] [CrossRef] [Green Version]
- de Cerqueira Gava, P.D.; Jorge, V.A.M.; Nascimento, C.L., Jr.; Adabo, G.J. AUV Cruising Auto Pilot for a Long Straight Confined Underwater Tunnel. In Proceedings of the 2020 IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24 August–20 September 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Meier, L.; Tanskanen, P.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A system for autonomous flight using onboard computer vision. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2992–2997. [Google Scholar] [CrossRef]
- ArduPilot Project. ArduSub. Available online: https://www.ardusub.com/ (accessed on 12 April 2022).
- Blue Robotics Inc. T200 Thruster. SKU: T200-THRUSTER-R2-RP. Available online: https://bluerobotics.com/store/thrusters/t100-t200-thrusters/t200-thruster-r2-rp/ (accessed on 12 April 2022).
- Jorge, V.A.M.; de Cerqueira Gava, P.D.; de França Silva, J.R.B.; Mancilha, T.M.; Vieira, W.; Adabo, G.J.; Nascimento, C.L., Jr. Analytical Approach to Sampling Estimation of Underwater Tunnels Using Mechanical Profiling Sonars. Sensors 2021, 21, 1900. [Google Scholar] [CrossRef] [PubMed]
- Pittelkau, M.E. Rotation Vector in Attitude Estimation. J. Guid. Control. Dyn. 2003, 26, 855–860. [Google Scholar] [CrossRef]
- Water Linked. DVL A50. Available online: https://store.waterlinked.com/product/dvl-a50/ (accessed on 12 April 2022).
- Mai, N.; Ji, Y.; Woo, H.; Tamura, Y.; Yamashita, A.; Hajime, A. Acoustic Image Simulator Based on Active Sonar Model in Underwater Environment. In Proceedings of the 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 775–780. [Google Scholar]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Workshop on Open Source Software in Robotics, Kobe, Japan, 17 May 2009. [Google Scholar]


























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Cerqueira Gava, P.D.; Nascimento Júnior, C.L.; Belchior de França Silva, J.R.; Adabo, G.J. Simu2VITA: A General Purpose Underwater Vehicle Simulator. Sensors 2022, 22, 3255. https://doi.org/10.3390/s22093255
de Cerqueira Gava PD, Nascimento Júnior CL, Belchior de França Silva JR, Adabo GJ. Simu2VITA: A General Purpose Underwater Vehicle Simulator. Sensors. 2022; 22(9):3255. https://doi.org/10.3390/s22093255
Chicago/Turabian Stylede Cerqueira Gava, Pedro Daniel, Cairo Lúcio Nascimento Júnior, Juan Ramón Belchior de França Silva, and Geraldo José Adabo. 2022. "Simu2VITA: A General Purpose Underwater Vehicle Simulator" Sensors 22, no. 9: 3255. https://doi.org/10.3390/s22093255
APA Stylede Cerqueira Gava, P. D., Nascimento Júnior, C. L., Belchior de França Silva, J. R., & Adabo, G. J. (2022). Simu2VITA: A General Purpose Underwater Vehicle Simulator. Sensors, 22(9), 3255. https://doi.org/10.3390/s22093255