
Estimating Running Ground Reaction Forces from Plantar Pressure during Graded Running


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The first running study to predict multiple ground reaction force components during running for different speeds and slopes
- We introduce a new combination of tools to understand the performance of time−continuous model predictions during gait
- GRF predictions with plantar pressure do not need a priori knowledge of the speed or slope
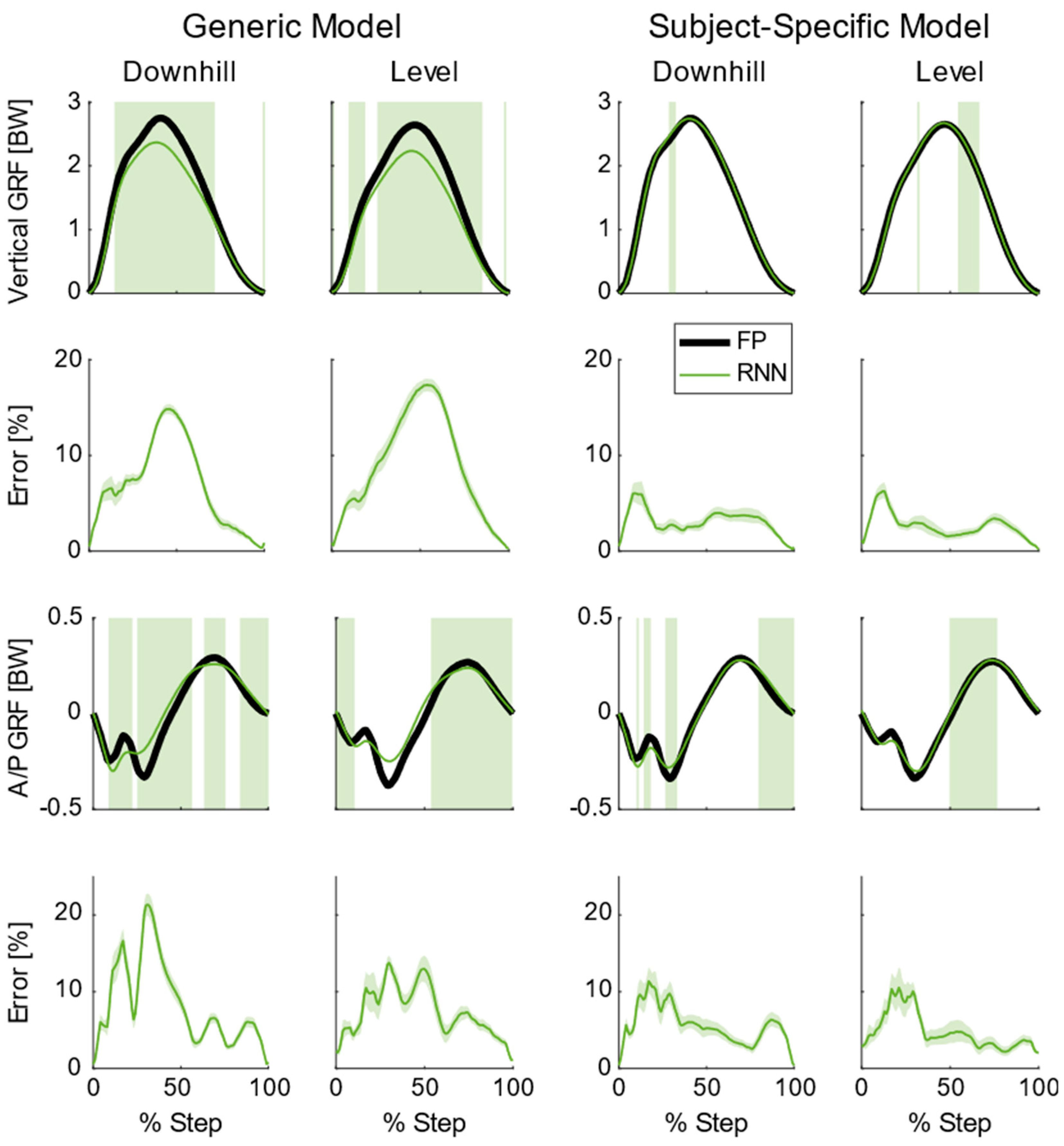
- Subject−specific training can enhance GRF predictions, such that these predictions could be confidently used outside of the laboratory
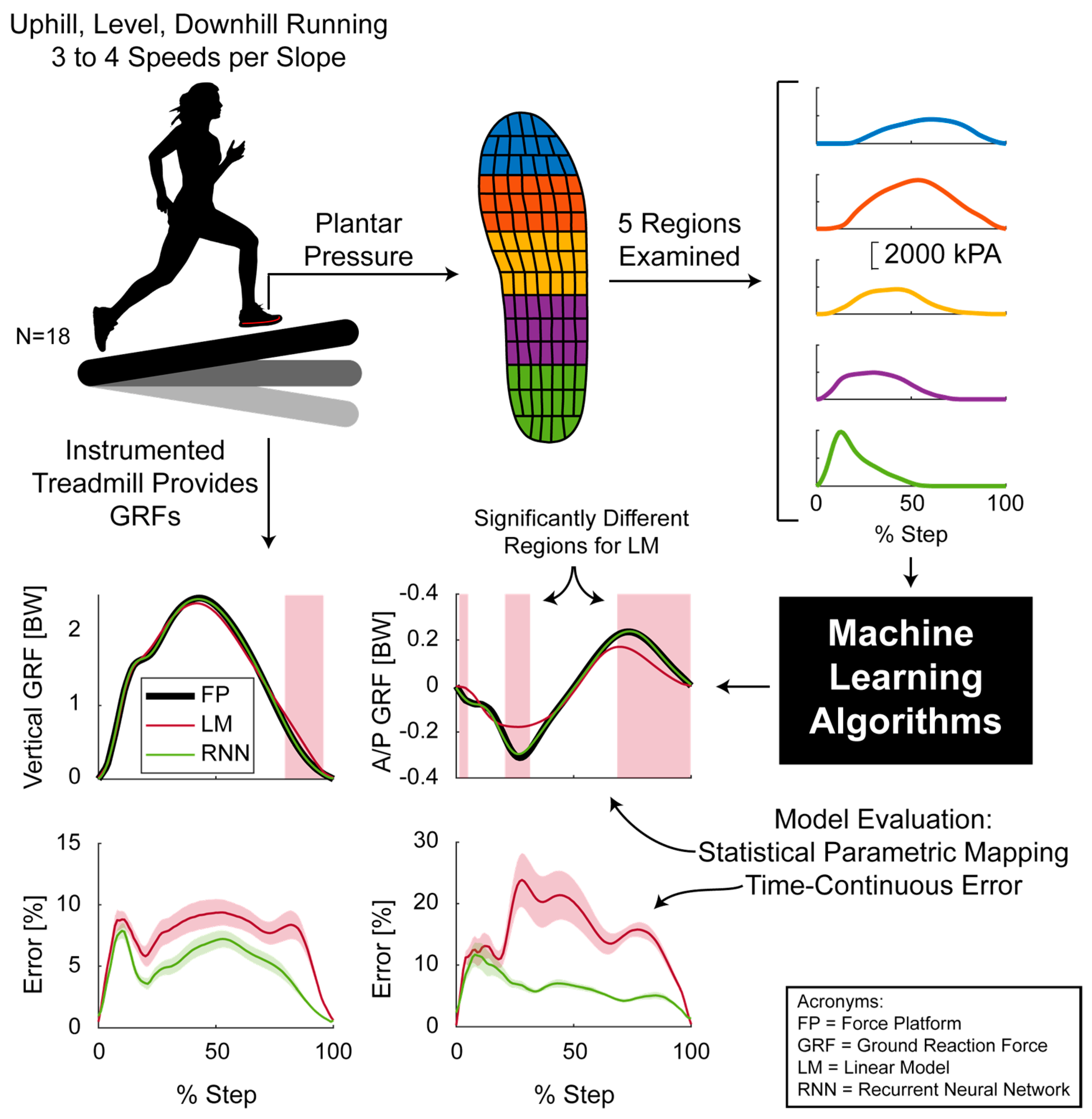
2. Materials and Methods
2.1. Participants and Protocol
2.2. Data Processing
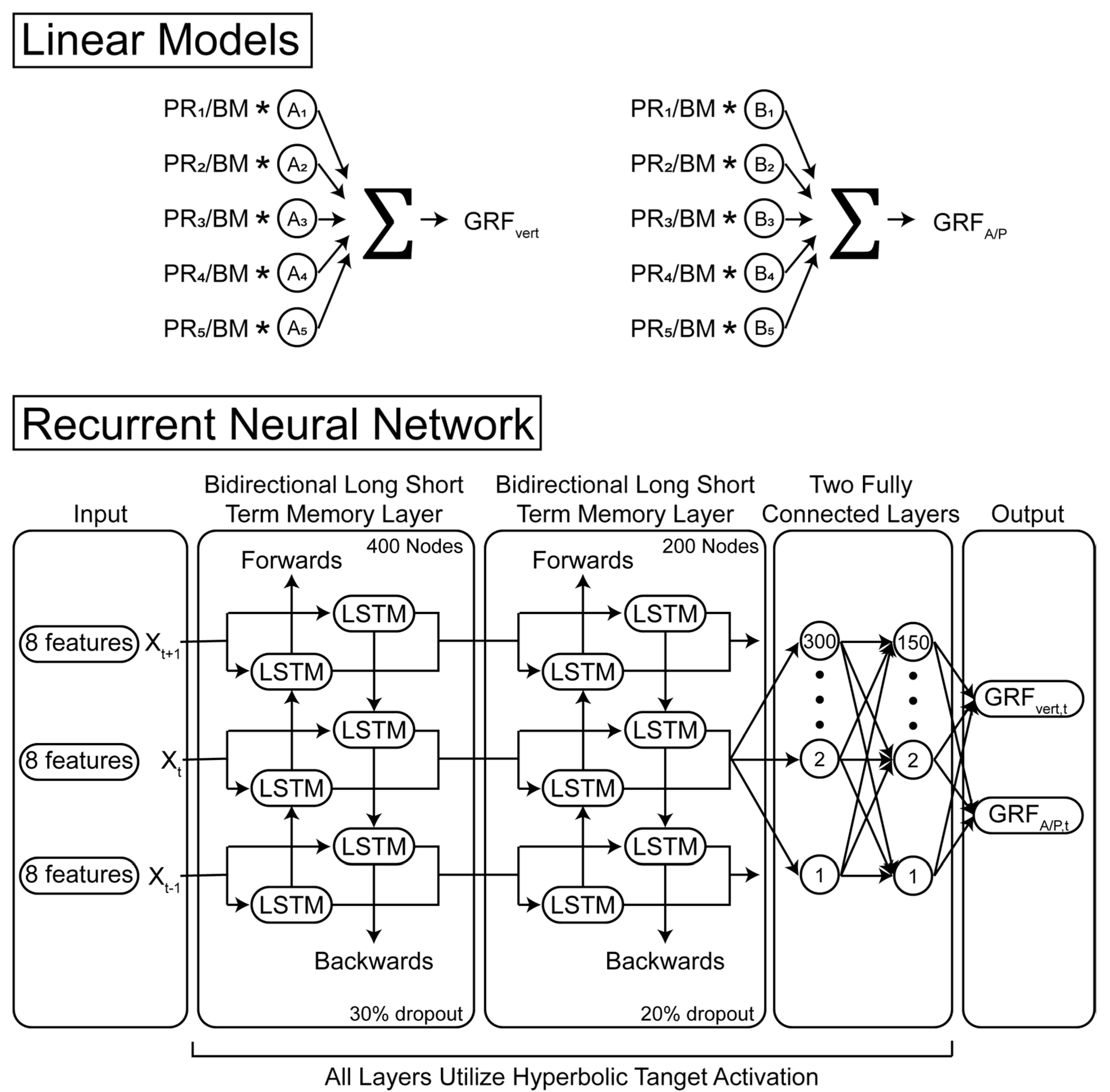
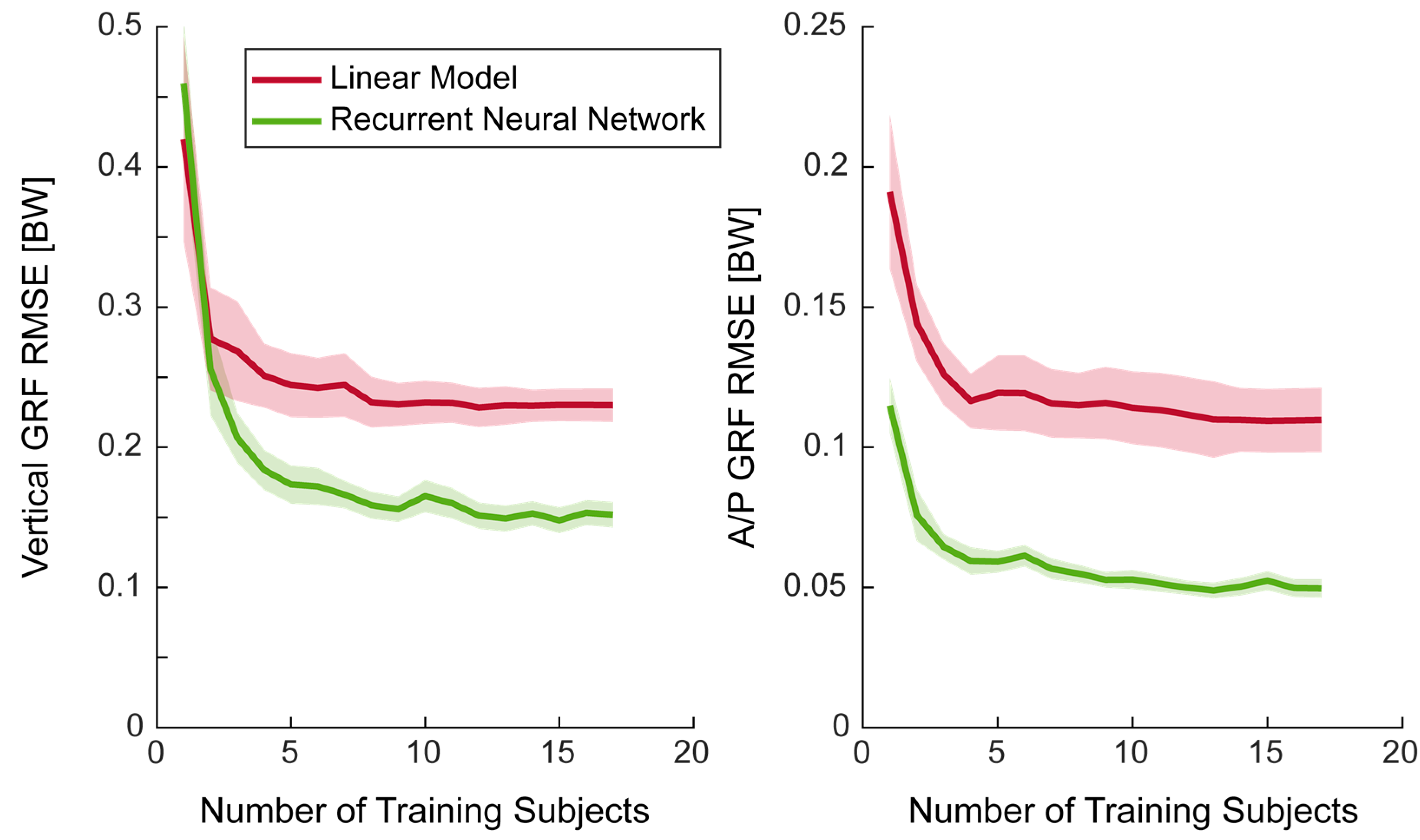
2.3. Model Development: Linear Model
2.4. Model Development: Recurrent Neural Network
2.5. Validation
3. Results
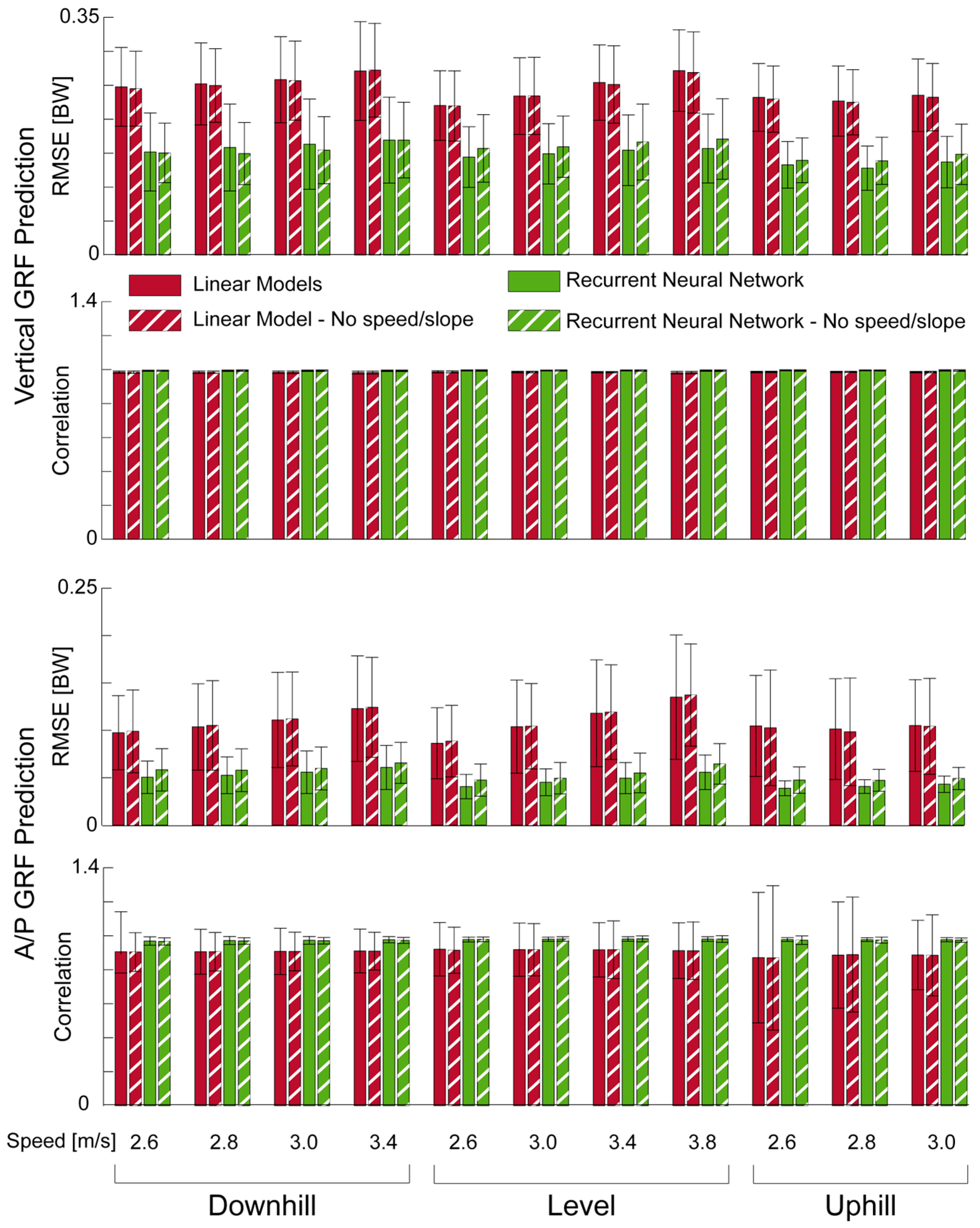
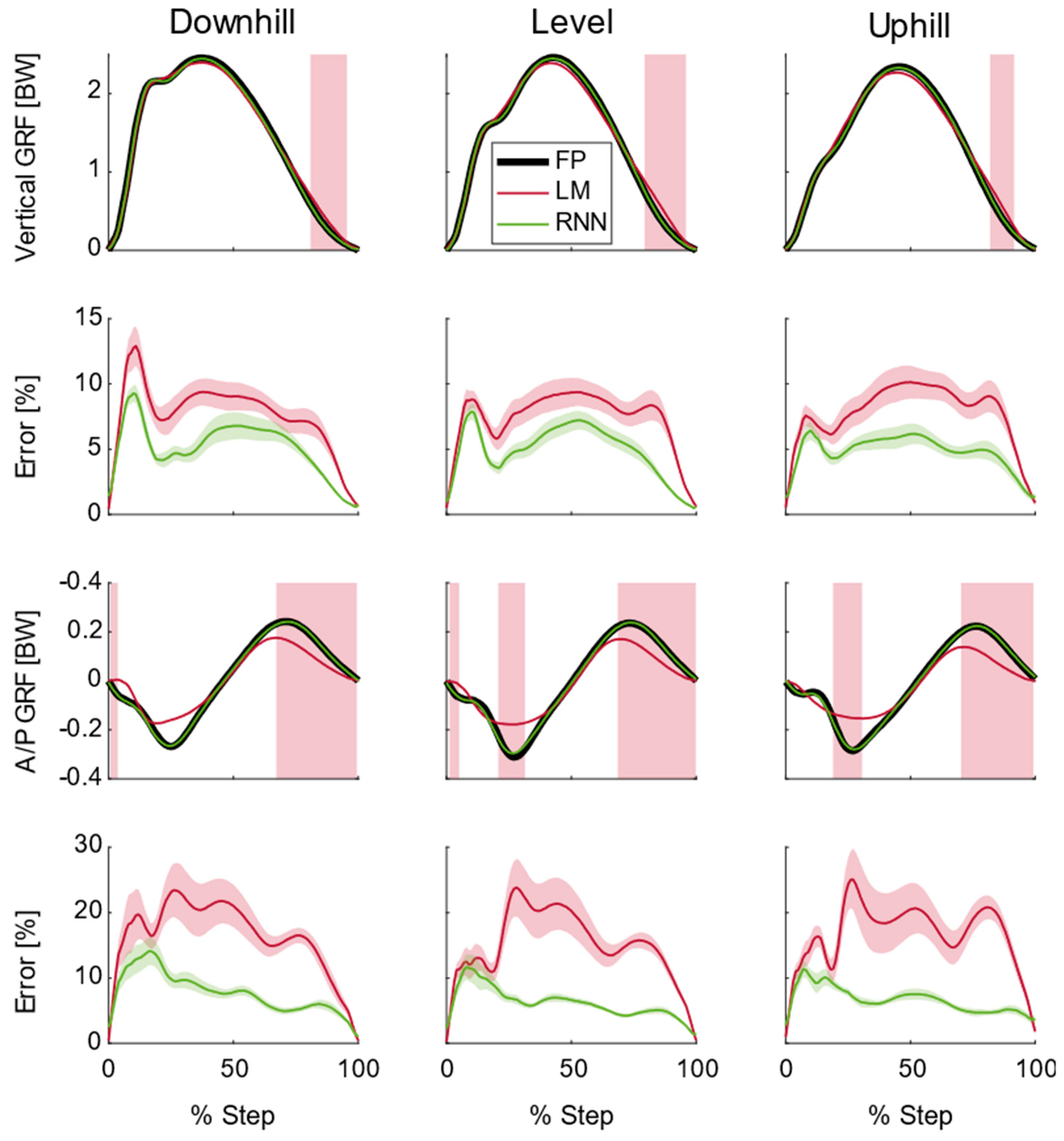
3.1. Model Ability to Predict Average Ground Reaction Forces
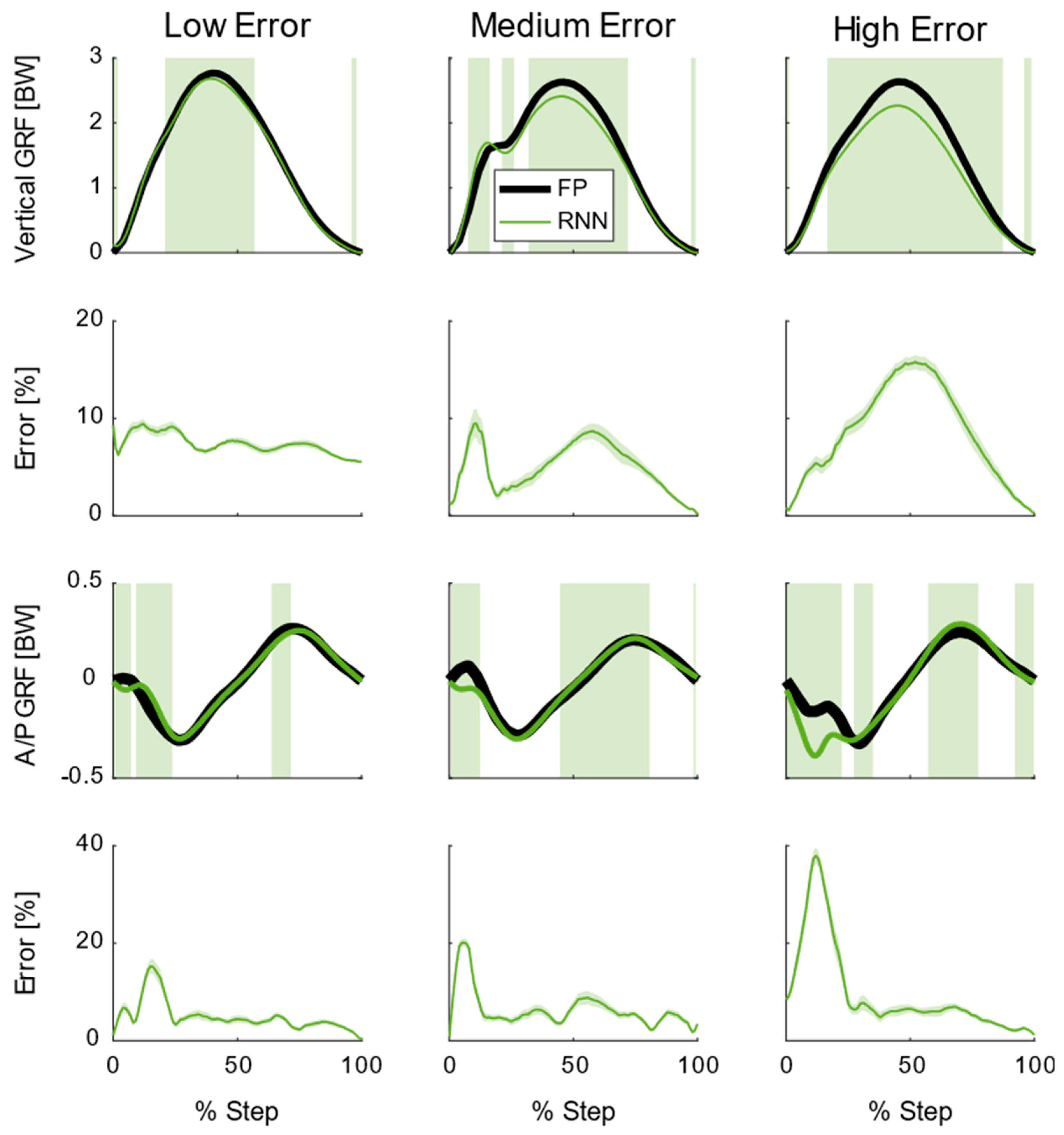
3.2. Model Ability to Predict Step−Average Ground Reaction Forces
3.3. Effect of Speed and Slope
4. Discussion
Anecdotes from Model Building
- The five plantar pressure regions examined here were based on data exploration and preliminary linear model fitting. We explored as little as three regions and some explorations looked at regions that were unequal in size/length. The five regions used here worked relatively well. We did explore using all 99 pressure sensors as inputs to the recurrent neural network; however, it did not improve performance enough to justify the added complexity and reduced applicability to other pressure sensing modalities.
- The GRFs were aligned parallel/perpendicular to the gravity vector as preliminary exploration demonstrated that such an orientation enabled better linear model predictions in contrast to GRFs aligned parallel/perpendicular to the running surface.
- Including a binary predictor variable for left/right foot was explored; however, it did not affect model performance
- The recurrent neural network sequence input layer was responsible for normalizing the predictor variables. We found that ‘Z−Score’ normalization resulted in the best performance. During network development we also experimented with four other methods, which did not perform as well:
- ○
- ‘zerocenter’; Subtract the mean
- ○
- ‘Rescale−symmetric’; Rescale range to [−1 1]
- ○
- ‘Rescale−zero−one’; Rescale range to [0 1]
- ○
- ‘none’; Raw inputs
- We applied a dropout function to each of the bidirectional LSTM layers of the recurrent neural network that set randomly selected nodes to 0. This was done to prevent overfitting and the dropout probability was 30% and 20% for the first and second bidirectional LSTM layer, respectively. During development, we experimented with lower (up to 0%) and higher (up to 80%) dropout probabilities. Generally, higher probabilities resulted in worse performances, while lower dropout probabilities created better training results but worse testing results.
- For the first two fully connected layers of the recurrent neural network we applied the hyperbolic tangent as activation function, while the last fully connected layer was not exposed to an additional transfer function. We experimented with the rectified liner unit transfer function as an alternative but found no substantial differences within the network performances.
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Matijevich, E.S.; Branscombe, L.M.; Scott, L.R.; Zelik, K.E. Ground Reaction Force Metrics Are Not Strongly Correlated with Tibial Bone Load When Running across Speeds and Slopes: Implications for Science, Sport and Wearable Tech. PLoS ONE 2019, 14, e0210000. [Google Scholar] [CrossRef] [Green Version]
- Hoogkamer, W.; Kipp, S.; Kram, R. The Biomechanics of Competitive Male Runners in Three Marathon Racing Shoes: A Randomized Crossover Study. Sports Med. 2019, 49, 133–143. [Google Scholar] [CrossRef]
- Kobashi, S.; Tsumori, Y.; Imawaki, S.; Yoshiya, S.; Hata, Y. Wearable Knee Kinematics Monitoring System of MARG Sensor and Pressure Sensor Systems. In Proceedings of the 2009 IEEE International Conference on System of Systems Engineering (SoSE), Albuquerque, NM, USA, 30 May–3 June 2009; pp. 1–6. [Google Scholar]
- Wouda, F.J.; Giuberti, M.; Bellusci, G.; Maartens, E.; Reenalda, J.; van Beijnum, B.-J.F.; Veltink, P.H. Estimation of Vertical Ground Reaction Forces and Sagittal Knee Kinematics During Running Using Three Inertial Sensors. Front. Physiol. 2018, 9, 218. [Google Scholar] [CrossRef]
- Seshadri, D.R.; Drummond, C.; Craker, J.; Rowbottom, J.R.; Voos, J.E. Wearable Devices for Sports: New Integrated Technologies Allow Coaches, Physicians, and Trainers to Better Understand the Physical Demands of Athletes in Real Time. IEEE Pulse 2017, 8, 38–43. [Google Scholar] [CrossRef]
- Savelberg, H.H.C.M.; de Lange, A.L.H. Assessment of the Horizontal, Fore-Aft Component of the Ground Reaction Force from Insole Pressure Patterns by Using Artificial Neural Networks. Clin. Biomech. 1999, 14, 585–592. [Google Scholar] [CrossRef]
- Forner Cordero, A.; Koopman, H.J.F.M.; van der Helm, F.C.T. Use of Pressure Insoles to Calculate the Complete Ground Reaction Forces. J. Biomech. 2004, 37, 1427–1432. [Google Scholar] [CrossRef]
- Wei, F.; Crechiolo, A.; Haut, R.C. Prediction of Ground Reaction Forces in Level and Incline/Decline Walking from a Multistage Analysis of Plantar Pressure Data. J. Biomech. 2019, 84, 46–51. [Google Scholar] [CrossRef]
- Fukushi, K.; Sekiguchi, Y.; Honda, K.; Yaguchi, H.; Izumi, S.-I. Three-Dimensional GRF and CoP Estimation during Stair and Slope Ascent/Descent with Wearable IMUs and Foot Pressure Sensors. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 6401–6404. [Google Scholar]
- Billing, D.C.; Nagarajah, C.R.; Hayes, J.P.; Baker, J. Predicting Ground Reaction Forces in Running Using Micro-Sensors and Neural Networks. Sports Eng. 2006, 9, 15–27. [Google Scholar] [CrossRef]
- Johnson, W.R.; Mian, A.; Robinson, M.A.; Verheul, J.; Lloyd, D.G.; Alderson, J.A. Multidimensional Ground Reaction Forces and Moments From Wearable Sensor Accelerations via Deep Learning. IEEE Trans. Biomed. Eng. 2021, 68, 289–297. [Google Scholar] [CrossRef]
- Alcantara, R.S.; Edwards, W.B.; Millet, G.Y.; Grabowski, A.M. Predicting Continuous Ground Reaction Forces from Accelerometers during Uphill and Downhill Running: A Recurrent Neural Network Solution. PeerJ 2022, 10, e12752. [Google Scholar] [CrossRef]
- Nedergaard, N.J.; Verheul, J.; Drust, B.; Etchells, T.; Lisboa, P.; Robinson, M.A.; Vanrenterghem, J. The Feasibility of Predicting Ground Reaction Forces during Running from a Trunk Accelerometry Driven Mass-Spring-Damper Model. PeerJ 2018, 6, e6105. [Google Scholar] [CrossRef] [Green Version]
- Ngoh, K.J.-H.; Gouwanda, D.; Gopalai, A.A.; Chong, Y.Z. Estimation of Vertical Ground Reaction Force during Running Using Neural Network Model and Uniaxial Accelerometer. J. Biomech. 2018, 76, 269–273. [Google Scholar] [CrossRef]
- Thiel, D.V.; Shepherd, J.; Espinosa, H.G.; Kenny, M.; Fischer, K.; Worsey, M.; Matsuo, A.; Wada, T. Predicting Ground Reaction Forces in Sprint Running Using a Shank Mounted Inertial Measurement Unit. Proceedings 2018, 2, 199. [Google Scholar] [CrossRef] [Green Version]
- Komaris, D.-S.; Pérez-Valero, E.; Jordan, L.; Barton, J.; Hennessy, L.; O’Flynn, B.; Tedesco, S. Predicting Three-Dimensional Ground Reaction Forces in Running by Using Artificial Neural Networks and Lower Body Kinematics. IEEE Access 2019, 7, 156779–156786. [Google Scholar] [CrossRef]
- Dorschky, E.; Nitschke, M.; Martindale, C.F.; van den Bogert, A.J.; Koelewijn, A.D.; Eskofier, B.M. CNN-Based Estimation of Sagittal Plane Walking and Running Biomechanics From Measured and Simulated Inertial Sensor Data. Front. Bioeng. Biotechnol. 2020, 8, 604. [Google Scholar] [CrossRef]
- Kim, B.; Lim, H.; Park, S. Spring-Loaded Inverted Pendulum Modeling Improves Neural Network Estimation of Ground Reaction Forces. J. Biomech. 2020, 113, 110069. [Google Scholar] [CrossRef]
- Pogson, M.; Verheul, J.; Robinson, M.A.; Vanrenterghem, J.; Lisboa, P. A Neural Network Method to Predict Task- and Step-Specific Ground Reaction Force Magnitudes from Trunk Accelerations during Running Activities. Med. Eng. Phys. 2020, 78, 82–89. [Google Scholar] [CrossRef]
- LeBlanc, B.; Hernandez, E.M.; McGinnis, R.S.; Gurchiek, R.D. Continuous Estimation of Ground Reaction Force during Long Distance Running within a Fatigue Monitoring Framework: A Kalman Filter-Based Model-Data Fusion Approach. J. Biomech. 2021, 115, 110130. [Google Scholar] [CrossRef]
- Lima-Silva, A.E.; Bertuzzi, R.C.M.; Pires, F.O.; Barros, R.V.; Gagliardi, J.F.; Hammond, J.; Kiss, M.A.; Bishop, D.J. Effect of Performance Level on Pacing Strategy during a 10-Km Running Race. Eur. J. Appl. Physiol. 2010, 108, 1045–1053. [Google Scholar] [CrossRef]
- Mastroianni, G.R.; Zupan, M.F.; Chuba, D.M.; Berger, R.C.; Wile, A.L. Voluntary Pacing and Energy Cost of Off-Road Cycling and Running. Appl. Ergon. 2000, 31, 479–485. [Google Scholar] [CrossRef]
- Townshend, A.D.; Worringham, C.J.; Stewart, I.B. Spontaneous Pacing during Overground Hill Running. Med. Sci. Sports Exerc. 2010, 42, 160–169. [Google Scholar] [CrossRef] [Green Version]
- Khassetarash, A.; Vernillo, G.; Martinez, A.; Baggaley, M.; Giandolini, M.; Horvais, N.; Millet, G.Y.; Edwards, W.B. Biomechanics of Graded Running: Part II—Joint Kinematics and Kinetics. Scand. J. Med. Sci. Sports 2020, 30, 1642–1654. [Google Scholar] [CrossRef]
- Donelan, J.M.; Kram, R.; Kuo, A.D. Simultaneous Positive and Negative External Mechanical Work in Human Walking. J. Biomech. 2002, 35, 117–124. [Google Scholar] [CrossRef]
- Riddick, R.C.; Kuo, A.D. Soft Tissues Store and Return Mechanical Energy in Human Running. J. Biomech. 2016, 49, 436–441. [Google Scholar] [CrossRef] [Green Version]
- Pataky, T.C. Generalized N-Dimensional Biomechanical Field Analysis Using Statistical Parametric Mapping. J. Biomech. 2010, 43, 1976–1982. [Google Scholar] [CrossRef]
- Honert, E.C.; Pataky, T.C. Timing of Gait Events Affects Whole Trajectory Analyses: A Statistical Parametric Mapping Sensitivity Analysis of Lower Limb Biomechanics. J. Biomech. 2021, 119, 110329. [Google Scholar] [CrossRef]
- Halilaj, E.; Rajagopal, A.; Fiterau, M.; Hicks, J.L.; Hastie, T.J.; Delp, S.L. Machine Learning in Human Movement Biomechanics: Best Practices, Common Pitfalls, and New Opportunities. J. Biomech. 2018, 81, 1–11. [Google Scholar] [CrossRef]
- Zrenner, M.; Gradl, S.; Jensen, U.; Ullrich, M.; Eskofier, B.M. Comparison of Different Algorithms for Calculating Velocity and Stride Length in Running Using Inertial Measurement Units. Sensors 2018, 18, 4194. [Google Scholar] [CrossRef] [Green Version]
- Nigg, B.M.; Bahlsen, H.A.; Luethi, S.M.; Stokes, S. The Influence of Running Velocity and Midsole Hardness on External Impact Forces in Heel-Toe Running. J. Biomech. 1987, 20, 951–959. [Google Scholar] [CrossRef]
- Rouhani, H.; Favre, J.; Crevoisier, X.; Aminian, K. Ambulatory Assessment of 3D Ground Reaction Force Using Plantar Pressure Distribution. Gait Posture 2010, 32, 311–316. [Google Scholar] [CrossRef]
- Lapuschkin, S.; Binder, A.; Montavon, G.; Muller, K.-R.; Samek, W. The LRP Toolbox for Artificial Neural Networks. J. Mach. Learn. Res. 2016, 17, 1–5. [Google Scholar]
- Hoitz, F.; von Tscharner, V.; Baltich, J.; Nigg, B.M. Individuality Decoded by Running Patterns: Movement Characteristics That Determine the Uniqueness of Human Running. PLoS ONE 2021, 16, e0249657. [Google Scholar] [CrossRef] [PubMed]
- McMahon, T.A.; Greene, P.R. The Influence of Track Compliance on Running. J. Biomech. 1979, 12, 893–904. [Google Scholar] [CrossRef]
- Franz, J.R.; Kram, R. Advanced Age Affects the Individual Leg Mechanics of Level, Uphill, and Downhill Walking. J. Biomech. 2013, 46, 535–540. [Google Scholar] [CrossRef] [Green Version]
- Sharma, S.; McMorland, A.J.C.; Stinear, J.W. Stance Limb Ground Reaction Forces in High Functioning Stroke and Healthy Subjects during Gait Initiation. Clin. Biomech. 2015, 30, 689–695. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Honert, E.C.; Hoitz, F.; Blades, S.; Nigg, S.R.; Nigg, B.M. Estimating Running Ground Reaction Forces from Plantar Pressure during Graded Running. Sensors 2022, 22, 3338. https://doi.org/10.3390/s22093338
Honert EC, Hoitz F, Blades S, Nigg SR, Nigg BM. Estimating Running Ground Reaction Forces from Plantar Pressure during Graded Running. Sensors. 2022; 22(9):3338. https://doi.org/10.3390/s22093338
Chicago/Turabian StyleHonert, Eric C., Fabian Hoitz, Sam Blades, Sandro R. Nigg, and Benno M. Nigg. 2022. "Estimating Running Ground Reaction Forces from Plantar Pressure during Graded Running" Sensors 22, no. 9: 3338. https://doi.org/10.3390/s22093338
APA StyleHonert, E. C., Hoitz, F., Blades, S., Nigg, S. R., & Nigg, B. M. (2022). Estimating Running Ground Reaction Forces from Plantar Pressure during Graded Running. Sensors, 22(9), 3338. https://doi.org/10.3390/s22093338