
Analysis of the Effect of Velocity on the Eddy Current Effect of Metal Particles of Different Materials in Inductive Bridges

 ,
,  , ,
, , 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensor Design and Theory Analysis
2.1. Inductance Detection Analysis
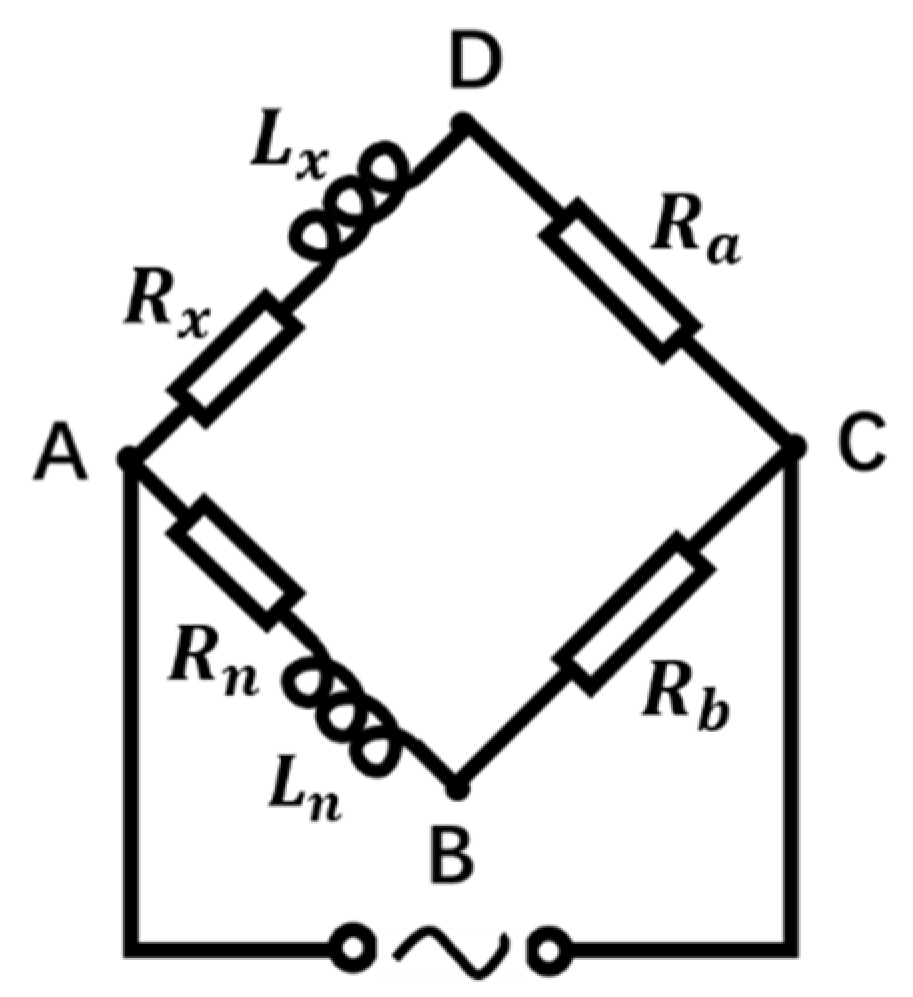
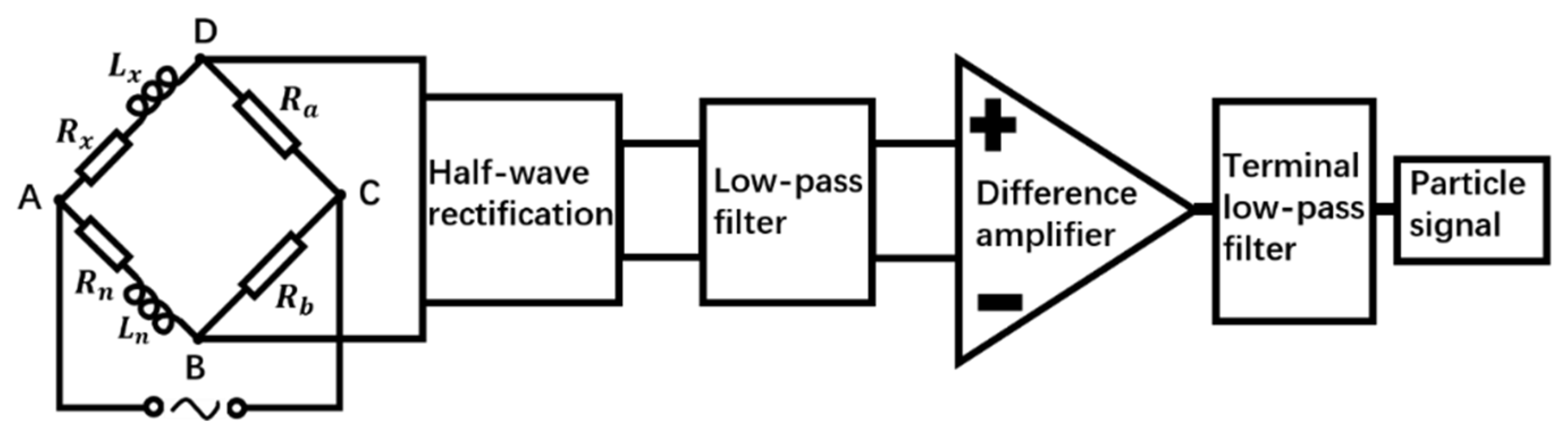
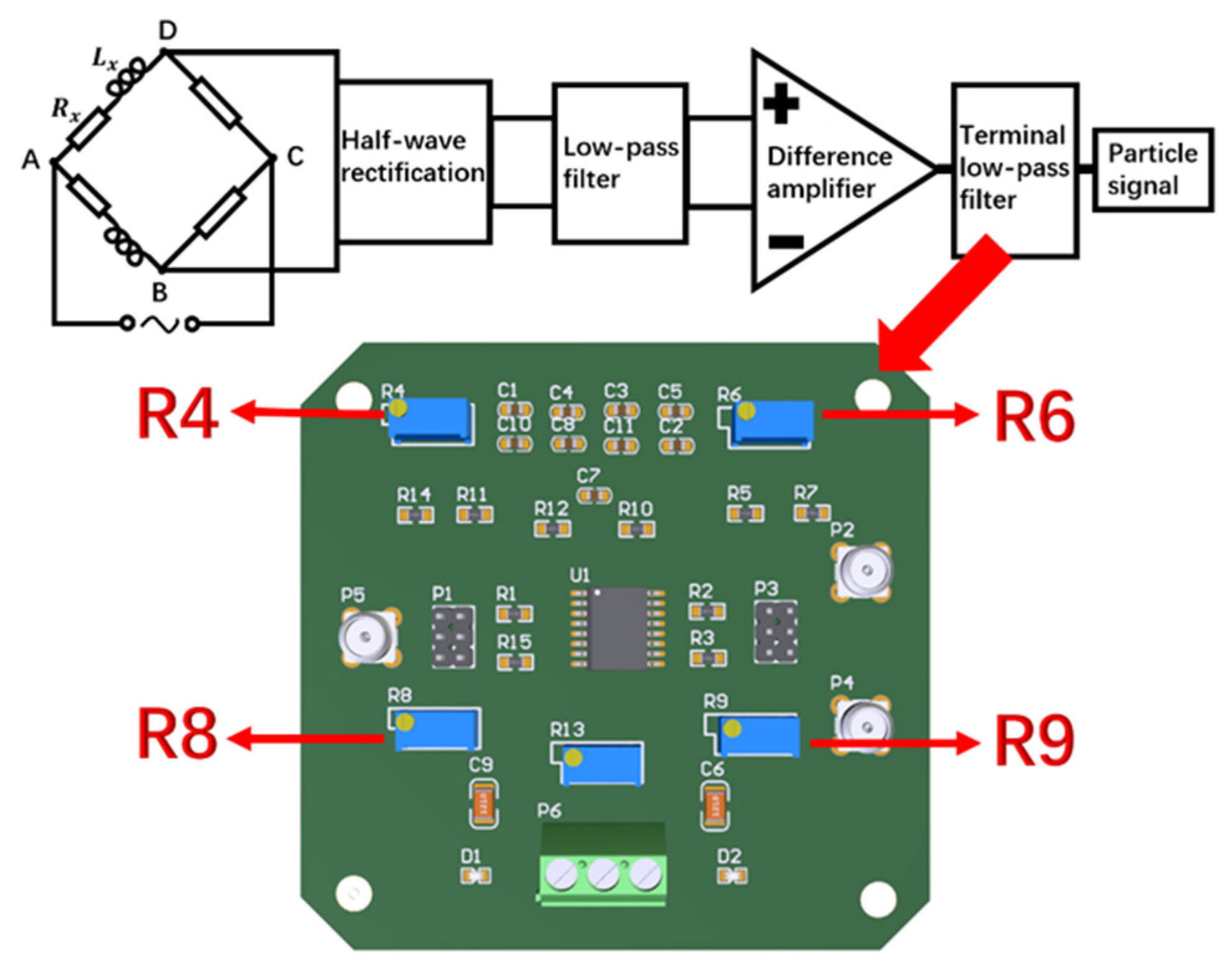
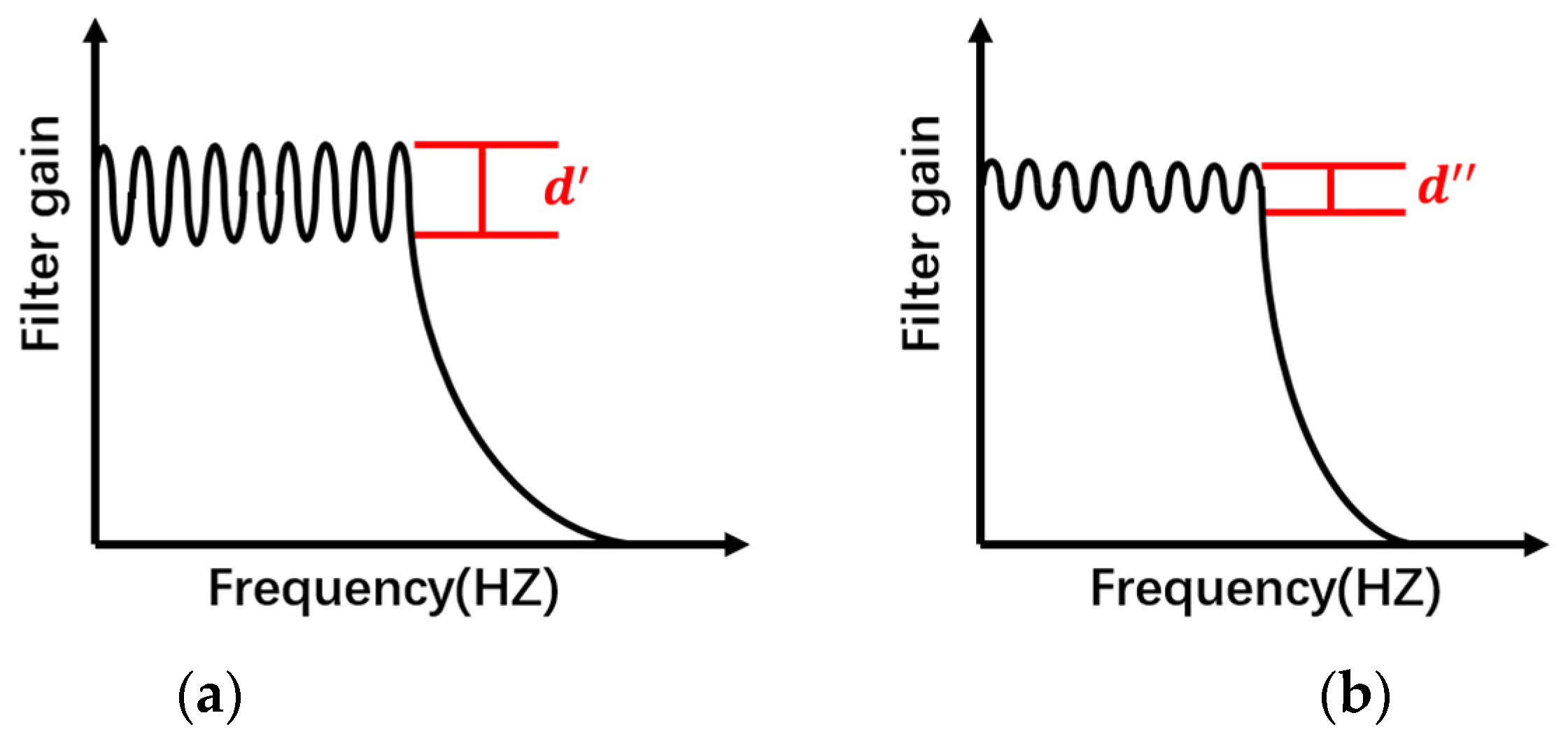
2.2. Design and Principle Analysis of Inductor Bridge
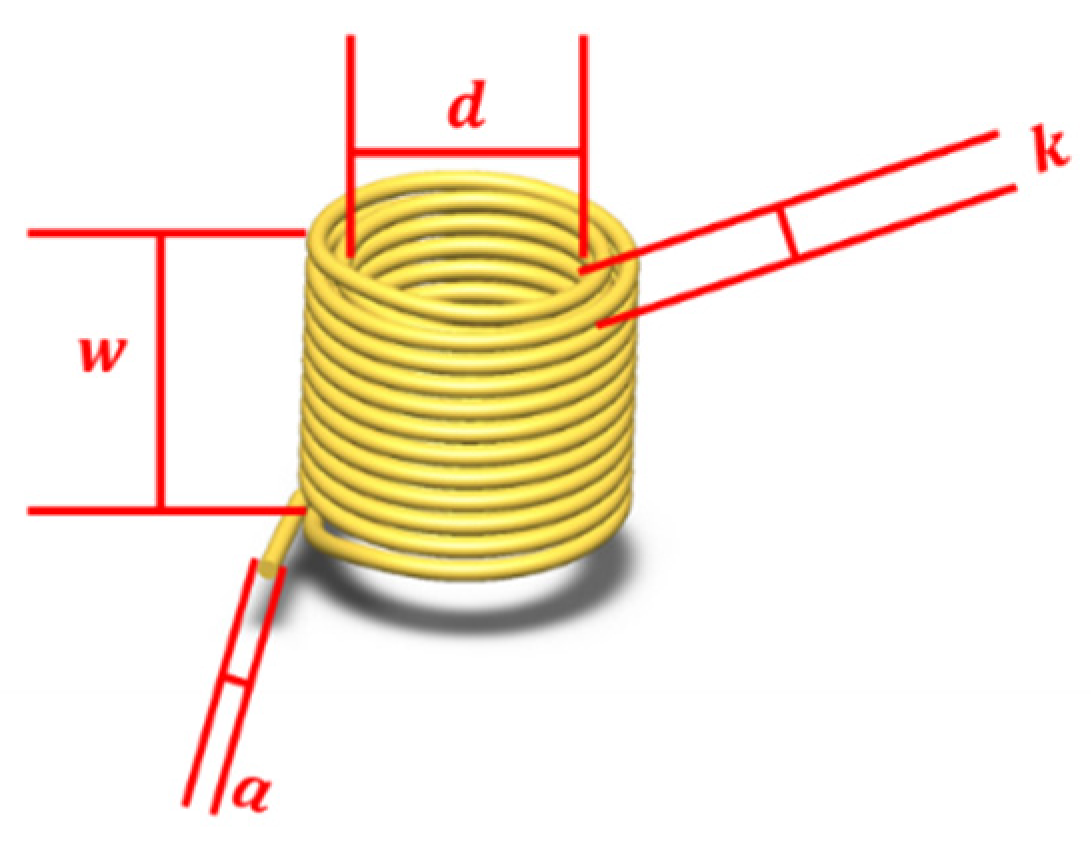
2.3. The Effect of Velocity on the Magnetic Field of a Solenoid
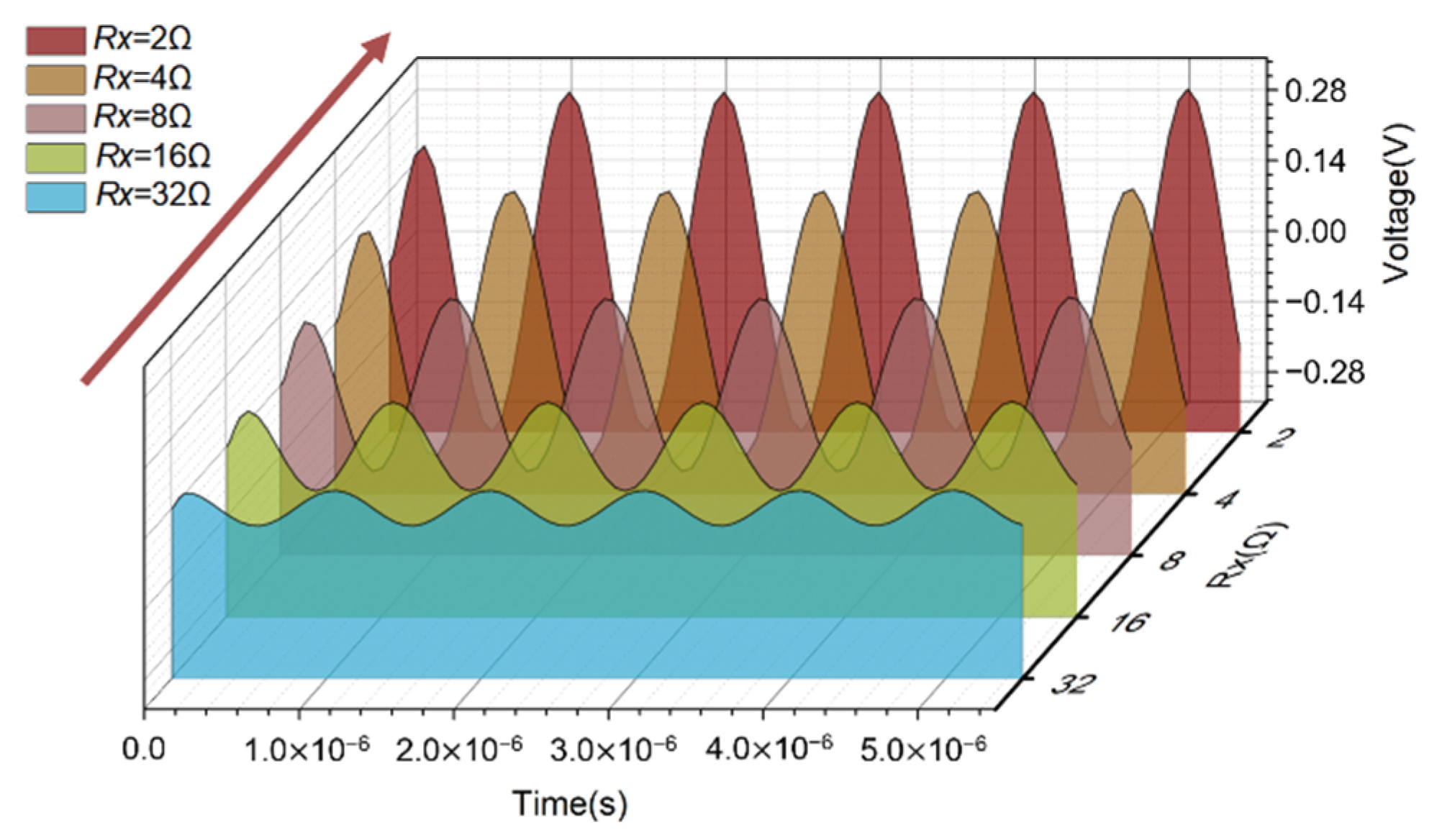
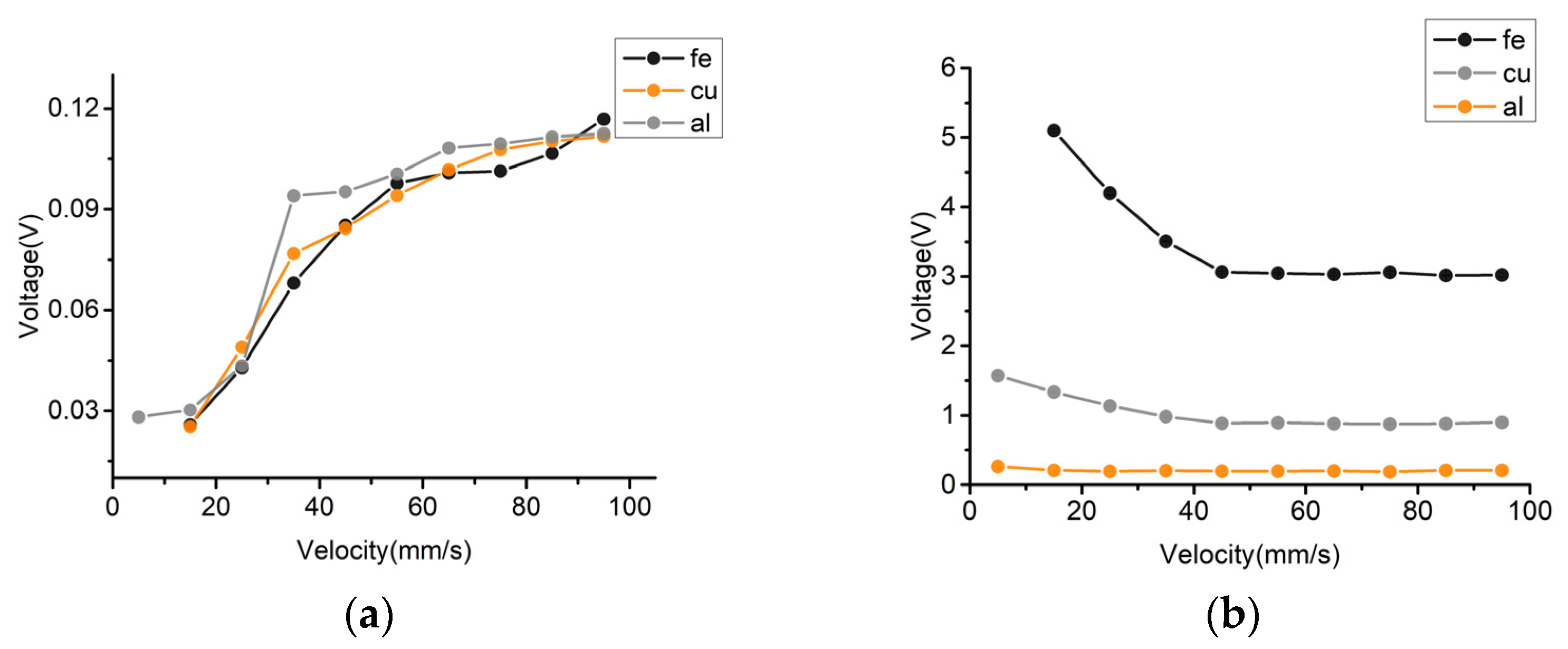
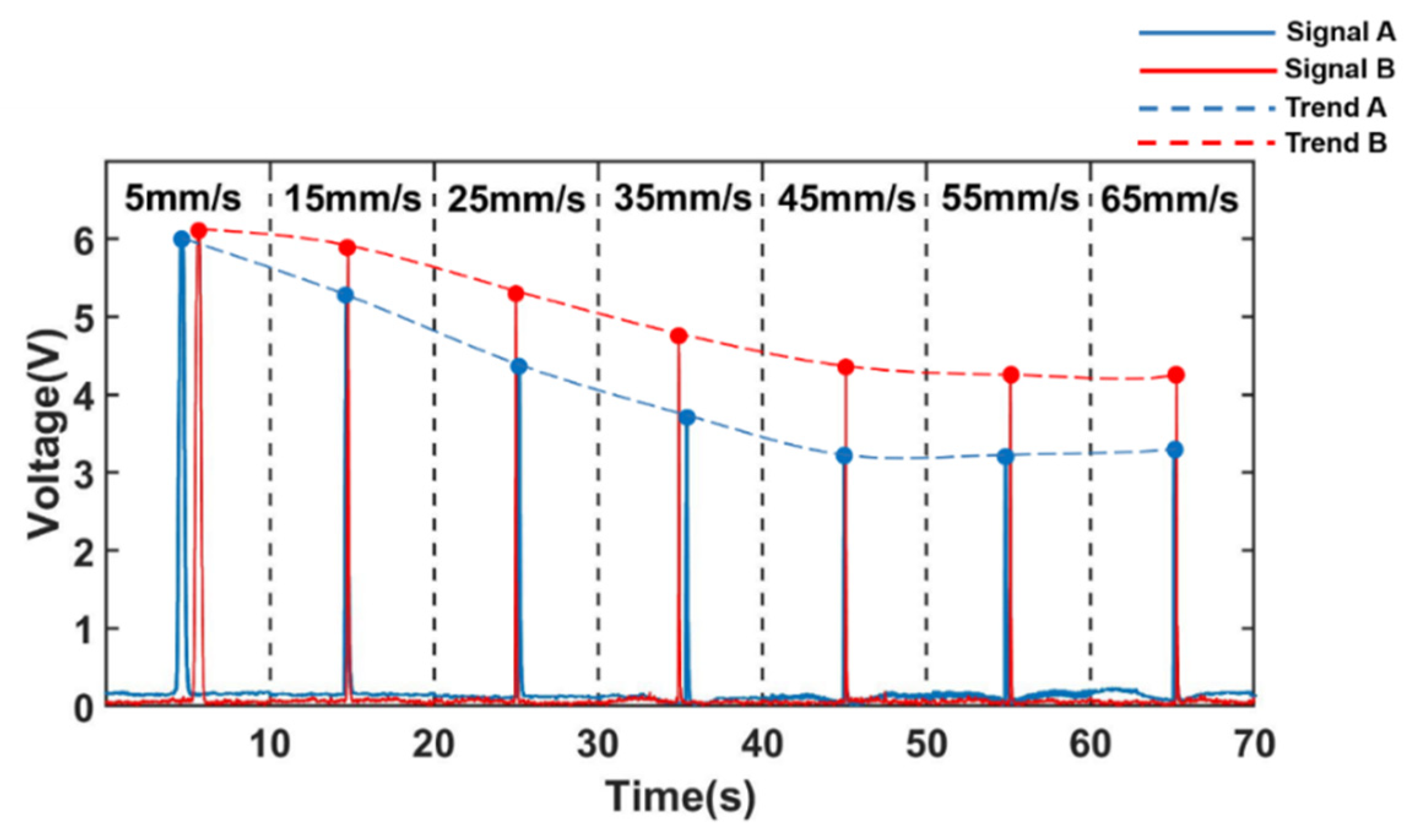
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Towsyfyan, H.; Gu, F.; Ball, A.D.; Liang, B. Tribological behaviour diagnostic and fault detection of mechanical seals based on acoustic emission measurements. Friction 2019, 7, 572–586. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Han, Q.; Chu, F.; Feng, Z. Vibration based condition monitoring and fault diagnosis of wind turbine planetary gearbox: A review. Mech. Syst. Signal Process. 2019, 126, 662–685. [Google Scholar] [CrossRef]
- Mohammed, A.; Djurovic, S. Electric Machine Bearing Health Monitoring and Ball Fault Detection by Simultaneous Thermo-Mechanical Fibre Optic Sensing. IEEE Trans. Energy Convers. 2021, 36, 71–80. [Google Scholar] [CrossRef]
- Muthuvel, P.; George, B.; Ramadass, G.A. A Highly Sensitive In-Line Oil Wear Debris Sensor Based on Passive Wireless LC Sensing. IEEE Sens. J. 2021, 21, 6888–6896. [Google Scholar] [CrossRef]
- Jia, R.; Ma, B.; Zheng, C.; Ba, X.; Wang, L.; Du, Q.; Wang, K. Comprehensive Improvement of the Sensitivity and Detectability of a Large-Aperture Electromagnetic Wear Particle Detector. Sensors 2019, 19, 3162. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Bai, C.; Yang, Z.; Zhang, H.; Li, W.; Wang, X.; Zheng, Y.; Ilerioluwa, L.; Sun, Y. Research on High Sensitivity Oil Debris Detection Sensor Using High Magnetic Permeability Material and Coil Mutual Inductance. Sensors 2022, 22, 1833. [Google Scholar] [CrossRef]
- De Azevedo, H.D.M.; Araújo, A.M.; Bouchonneau, N. A review of wind turbine bearing condition monitoring: State of the art and challenges. Renew. Sustain. Energy Rev. 2016, 56, 368–379. [Google Scholar] [CrossRef]
- Shi, H.; Zhang, H.; Huo, D.; Yu, S.; Su, J.; Xie, Y.; Li, W.; Ma, L.; Chen, H.; Sun, Y. An Ultrasensitive Microsensor Based on Impedance Analysis for Oil Condition Monitoring. IEEE Trans. Ind. Electron. 2022, 69, 7441–7450. [Google Scholar] [CrossRef]
- Li, Y.; Yu, C.; Xue, B.; Zhang, H.; Zhang, X. A Double Lock-in Amplifier Circuit for Complex Domain Signal Detection of Particles in Oil. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Jakoby, B.; Scherer, M.; Buskies, M.; Eisenschmid, H. An automotive engine oil viscosity sensor. IEEE Sens. J. 2003, 3, 562–568. [Google Scholar] [CrossRef]
- Shi, H.; Zhang, H.; Ma, L.; Sun, Y.; Chen, H.; Zhao, X.; Bai, C.; Zhang, Y. Inductive-Capacitive Coulter Counting: Detection and Differentiation of Multi-Contaminants in Hydraulic Oil Using a Microfluidic Sensor. IEEE Sens. J. 2021, 21, 2067–2076. [Google Scholar] [CrossRef]
- Birkin, P.R.; Youngs, J.J.; Truscott, T.T.; Martini, S. Development of an optical flow through detector for bubbles, crystals and particles in oils. Phys. Chem. Chem. Phys. 2022, 24, 1544–1552. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Yoo, S.J.; Yoon, J.; Kim, Y.J. Inductive particle detection system for real-time monitoring of metals in airborne particles. Sens. Actuators-Phys. 2021, 332, 113153. [Google Scholar] [CrossRef]
- Koo, H.; Ahn, H.S. Monitoring Inductance Change to Quantitatively Analyze Magnetic Wear Debris in Lubricating Oil. Tribol. Lubr. 2016, 32, 189–194. [Google Scholar] [CrossRef] [Green Version]
- Haiden, C.; Wopelka, T.; Jech, M.; Keplinger, F.; Vellekoop, M.J. A Microfluidic Chip and Dark-Field Imaging System for Size Measurement of Metal Wear Particles in Oil. IEEE Sens. J. 2016, 16, 1182–1189. [Google Scholar] [CrossRef]
- Zhang, H.; Chon, C.H.; Pan, X.; Li, D. Methods for counting particles in microfluidic applications. Microfluid. Nanofluid. 2009, 7, 739. [Google Scholar] [CrossRef]
- Shi, H.; Bai, C.; Xie, Y.; Li, W.; Zhang, H.; Liu, Y.; Zheng, Y.; Zhang, S.; Zhang, Y.; Lu, H.; et al. Capacitive–Inductive Magnetic Plug Sensor with High Adaptability for Online Debris Monitoring. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar] [CrossRef]
- Murali, S.; Jagtiani, A.V.; Xia, X.; Carletta, J.; Zhe, J. A microfluidic Coulter counting device for metal wear detection in lubrication oil. Rev. Sci. Instrum. 2009, 80, 016105. [Google Scholar] [CrossRef] [Green Version]
- Du, L.; Zhe, J. A microfluidic inductive pulse sensor for real time detection of machine wear. In Proceedings of the 2011 IEEE 24th International Conference on Micro Electro Mechanical Systems, Cancun, Mexico, 23–27 January 2011; pp. 1079–1082. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, H.; Sun, Y.; Chen, H.; Zhang, Y. Research on the Output Characteristics of Microfluidic Inductive Sensor. J. Nanomater. 2014, 2014, 725246. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.; Shi, H.; Zhang, H.; Li, G.; Shen, Y.; Zeng, N. High-sensitivity distinguishing and detection method for wear debris in oil of marine machinery. Ocean Eng. 2020, 215, 107452. [Google Scholar] [CrossRef]
- Li, Y.; Wu, J.; Guo, Q. Design on Electromagnetic Detection Sensor on Wear Debris in Lubricating Oil. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Davis, J.P.; Carletta, J.E.; Veillette, R.J.; Du, L.; Zhe, J. Instrumentation circuitry for an inductive wear debris sensor. In Proceedings of the 10th IEEE International NEWCAS Conference, Montreal, QC, Canada, 17–20 June 2012; pp. 501–504. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, Y.; Li, N.; Qian, Z.; Liu, D.; Qian, Z.; Zhang, C. A New Inductive Debris Sensor Based on Dual-Excitation Coils and Dual-Sensing Coils for Online Debris Monitoring. Sensors 2021, 21, 7556. [Google Scholar] [CrossRef] [PubMed]
- Chady, T.; Enokizono, M.; Todaka, T.; Tsuchida, Y.; Yasutake, T. Identification of three-dimensional distribution of metal particles using electromagnetic tomography system. J. Mater. Process. Technol. 2007, 181, 177–181. [Google Scholar] [CrossRef]
- Bai, C.; Zhang, H.; Wang, W.; Zhao, X.; Chen, H.; Zeng, N. Inductive-Capacitive Dual-Mode Oil Detection Sensor Based on Magnetic Nanoparticle Material. IEEE Sens. J. 2020, 20, 12274–12281. [Google Scholar] [CrossRef]
- Zhu, X.; Du, L.; Zhe, J. A 3 × 3 wear debris sensor array for real time lubricant oil conditioning monitoring using synchronized sampling. Mech. Syst. Signal Process. 2017, 83, 296–304. [Google Scholar] [CrossRef] [Green Version]
- Jagtiani, A.V.; Carletta, J.; Zhe, J. A microfluidic multichannel resistive pulse sensor using frequency division multiplexing for high throughput counting of micro particles. J. Micromech. Microeng. 2011, 21, 065004. [Google Scholar] [CrossRef]
- Bai, C.; Zhang, H.; Zeng, L.; Zhao, X.; Yu, Z. High-Throughput Sensor to Detect Hydraulic Oil Contamination Based on Microfluidics. IEEE Sens. J. 2019, 19, 8590–8596. [Google Scholar] [CrossRef]
- Wang, X.; Chen, P.; Luo, J.; Yang, L.; Feng, S. Characteristics and Superposition Regularity of Aliasing Signal of an Inductive Debris Sensor Based on a High-Gradient Magnetic Field. IEEE Sens. J. 2020, 20, 10071–10078. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, H. Research on the effect of relative movement on the output characteristic of inductive sensors. Sens. Actuators Phys. 2017, 267, 485–490. [Google Scholar] [CrossRef]
- Liu, E.; Zhang, H.; Wu, Y.; Fu, H.; Sun, Y.; Chen, H. Effect of oil velocity on sensitivity of micron metal particle detection by inductive sensor. Opt. Precis Eng. 2016, 24, 533–539. [Google Scholar] [CrossRef]
- Zhang, X.; Zeng, L.; Zhang, H.; Huang, S. Magnetization Model and Detection Mechanism of a Microparticle in a Harmonic Magnetic Field. IEEE ASME Trans. Mechatron. 2019, 24, 1882–1892. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, H.; Shi, H.; Zhang, Y. Frequency Research of Microfluidic Wear Debris Detection Chip Based on Inductive Wheatstone Bridge. In Proceedings of the 2021 IEEE 16th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Xiamen, China, 25–29 April 2021; pp. 780–785. [Google Scholar] [CrossRef]
- Xie, Y.; Shi, H.; Zhang, H.; Yu, S.; Llerioluwa, L.; Zheng, Y.; Li, G.; Sun, Y.; Chen, H. A Bridge-Type Inductance Sensor with a Two-Stage Filter Circuit for High-Precision Detection of Metal Debris in the Oil. IEEE Sens. J. 2021, 21, 17738–17748. [Google Scholar] [CrossRef]
- Jia, R.; Ma, B.; Zheng, C.; Wang, L.; Ba, X.; Du, Q.; Wang, K. Magnetic Properties of Ferromagnetic Particles under Alternating Magnetic Fields: Focus on Particle Detection Sensor Applications. Sensors 2018, 18, 4144. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Kong, M.; Xu, C.; Wang, S.; Fan, Y. An Integrated Instrumentation System for Velocity, Concentration and Mass Flow Rate Measurement of Solid Particles Based on Electrostatic and Capacitance Sensors. Sensors 2015, 15, 31023–31035. [Google Scholar] [CrossRef] [Green Version]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Yu, S.; Zhang, H.; Zhang, X.; Bai, C.; Shi, H.; Xie, Y.; Wang, C.; Xu, Z.; Zeng, L.; et al. Analysis of the Effect of Velocity on the Eddy Current Effect of Metal Particles of Different Materials in Inductive Bridges. Sensors 2022, 22, 3406. https://doi.org/10.3390/s22093406
Li W, Yu S, Zhang H, Zhang X, Bai C, Shi H, Xie Y, Wang C, Xu Z, Zeng L, et al. Analysis of the Effect of Velocity on the Eddy Current Effect of Metal Particles of Different Materials in Inductive Bridges. Sensors. 2022; 22(9):3406. https://doi.org/10.3390/s22093406
Chicago/Turabian StyleLi, Wei, Shuang Yu, Hongpeng Zhang, Xingming Zhang, Chenzhao Bai, Haotian Shi, Yucai Xie, Chengjie Wang, Zhiwei Xu, Lin Zeng, and et al. 2022. "Analysis of the Effect of Velocity on the Eddy Current Effect of Metal Particles of Different Materials in Inductive Bridges" Sensors 22, no. 9: 3406. https://doi.org/10.3390/s22093406
APA StyleLi, W., Yu, S., Zhang, H., Zhang, X., Bai, C., Shi, H., Xie, Y., Wang, C., Xu, Z., Zeng, L., & Sun, Y. (2022). Analysis of the Effect of Velocity on the Eddy Current Effect of Metal Particles of Different Materials in Inductive Bridges. Sensors, 22(9), 3406. https://doi.org/10.3390/s22093406