

Using Wearable Sensors to Estimate Mechanical Power Output in Cyclical Sports Other than Cycling—A Review
_Veeger.png)

Abstract
:1. Introduction
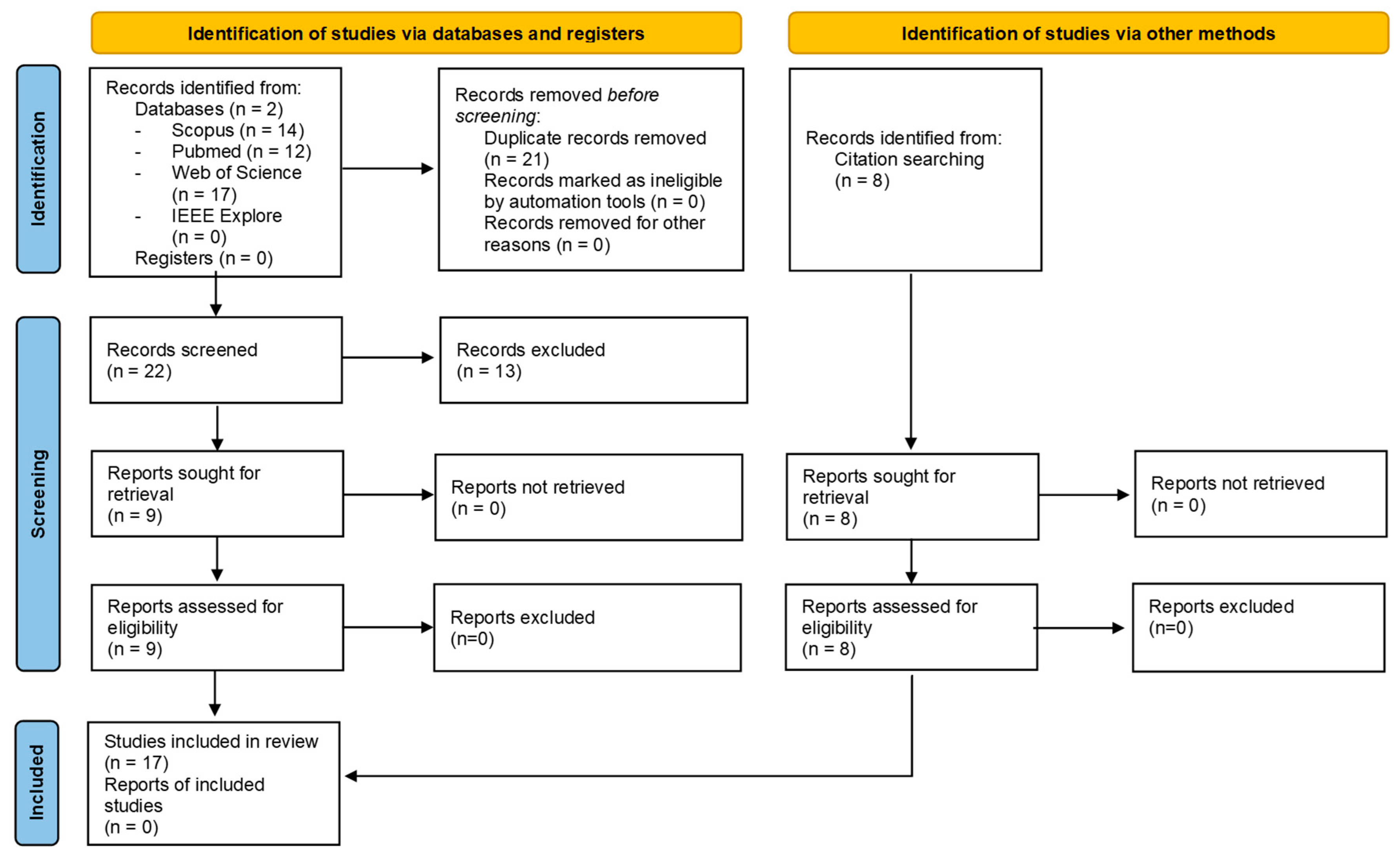
2. Method
2.1. Literature Search
2.2. Selection of Studies
3. Overview
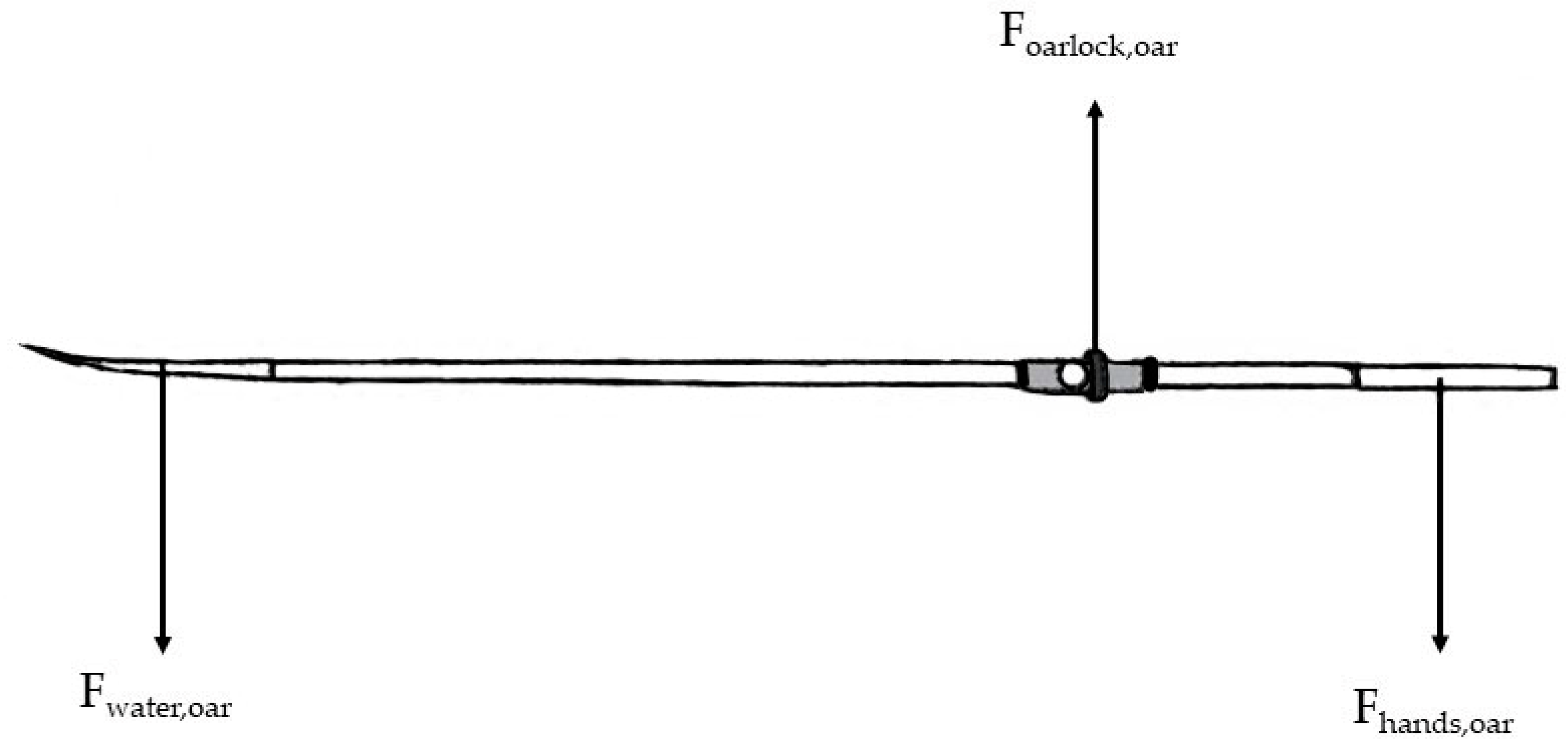
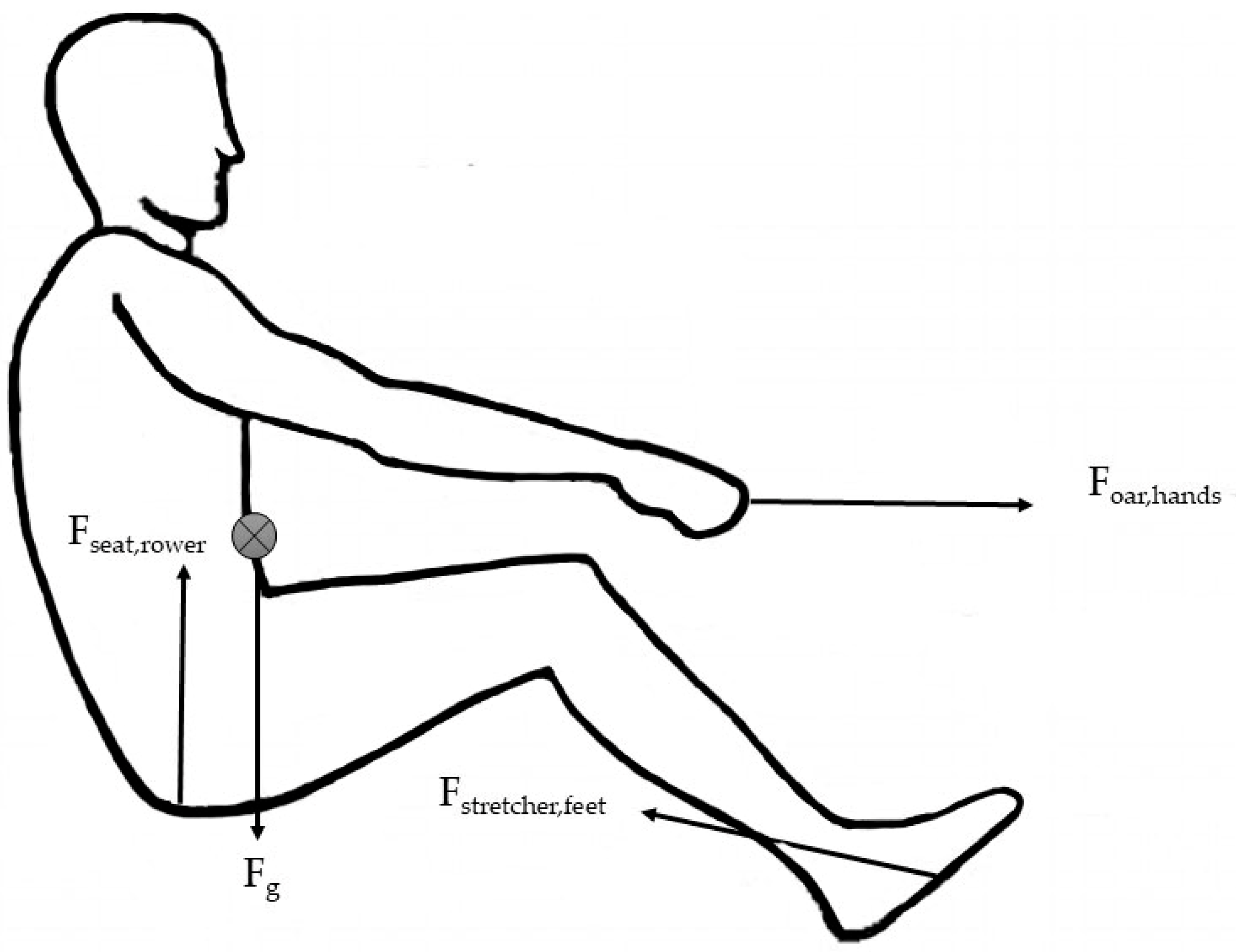
3.1. Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sport | Study | Rigid Body Definition | Force Measurement (Sensor Type) | Kinematic Measurement (Sensor Type) | Commercially Available (Name) |
|---|---|---|---|---|---|
| Kayaking | Hogan et al. [14] Macdermid and Fink [15] | Paddle | (SG) | (IMU) | Yes (Kayak Power Meter) |
| Rowing | Baudouin and Hawkins [16] | Oar | (SG) | (POT) | No |
| Doyle et al. [17] | Oar | (2D load transducers) | (ACC) | No | |
| Holt et al. [18] | Oar | (-) | (-) | Yes (PowerLine, EmPower, OarPowerMeter) | |
| Wheelchair propulsion | Conger et al. [19] | Wheel | SG) | (-) | Yes (PowerTap SL+ Track Hub) |
| de Groot et al. [20] | Wheel | (-) | (-) | Yes (OptiPush, SMARTWheel) | |
| de Klerk et al. [21] van der Scheer et al. [22] | Wheel | (-) | (-) | Yes (OptiPush) | |
| Mason et al. [23] | Wheel | (-) | (-) | Yes (SMARTWheel) |
3.1.1. Transportation Object as the Rigid Body
| Sport | Study | Rigid Body Definition | Estimated Term | Force Measurement (Sensor Type) | Kinematic Measurement (Sensor Type) |
|---|---|---|---|---|---|
| Rowing | Kleshnev [24] | Rower | PO | (instrumented gates) (SG) | (ACC) |
| Lintmeijer et al. [10] | Rower | - | * (IMU) | ||
| Speed skating | van der Kruk et al. [11] | Skater | (3D force sensors) | - | |
| Cross-country skiing | Gloersen et al. [25] | Skier (SB) | PO | (IMU) | |
| Ohtonen et al. [12] | Skier | (SG) | - | ||
| Uddin et al. [26] | Skier (SB) | PO | - | ** (IMU) | |
| Wheelchair propulsion | Rietveld et al. [13] | Wheelchair + athlete (SB) | PO | (IMU) |
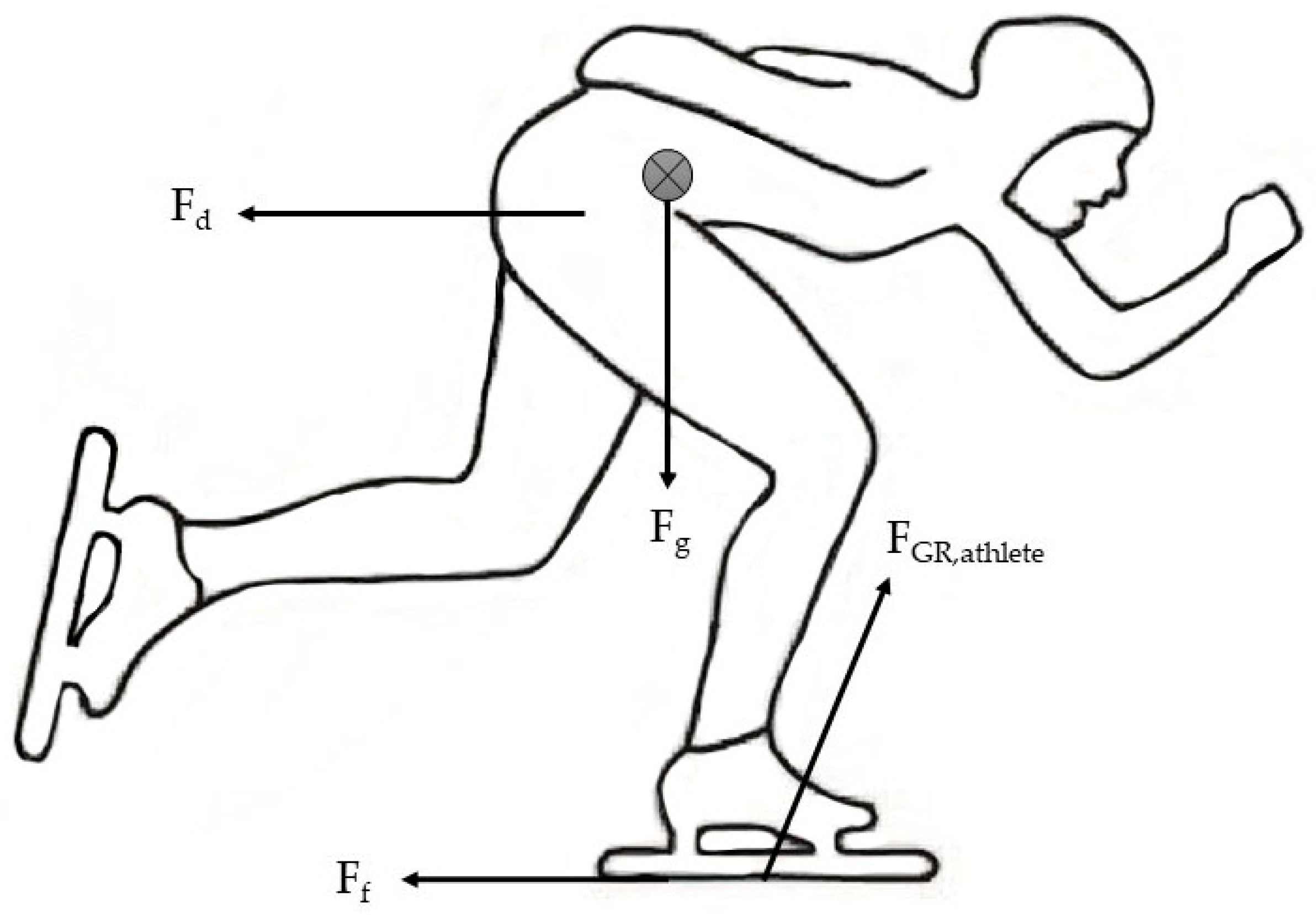
3.1.2. Athlete as the Rigid Body
3.2. Sensors
3.2.1. Direct Mechanical Power Measurement
3.2.2. Force and Kinematic Measurement
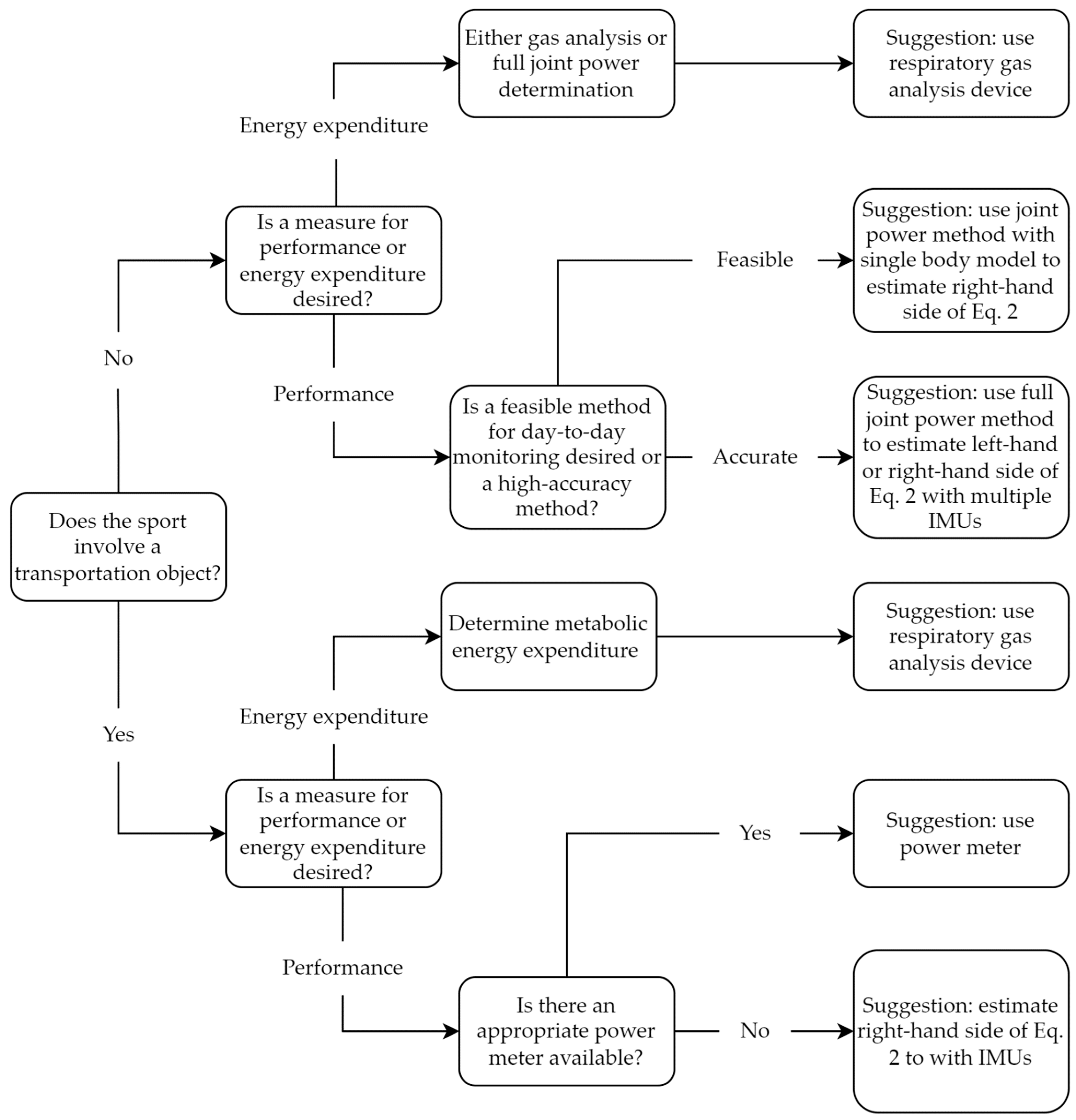
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A



Appendix B

References
- van Ingen Schenau, G.J.; Cavanagh, P.R. Power Equations in Endurance Sports. J. Biomech. 1990, 23, 865–881. [Google Scholar] [CrossRef] [PubMed]
- Halson, S.L. Monitoring Training Load to Understand Fatigue in Athletes. Sports Med. 2014, 44, 139–147. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mujika, I. Quantification of Training and Competition Loads in Endurance Sports: Methods and Applications. Int. J. Sports Physiol. Perform. 2017, 12, S2-9–S2-17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Soligard, T.; Schwellnus, M.; Alonso, J.-M.; Bahr, R.; Clarsen, B.; Dijkstra, H.P.; Gabbett, T.; Gleeson, M.; Hägglund, M.; Hutchinson, M.R.; et al. How Much Is Too Much? (Part 1) International Olympic Committee Consensus Statement on Load in Sport and Risk of Injury. Br. J. Sports Med. 2016, 50, 1030–1041. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bini, R.; Diefenthaeler, F.; Carpes, F. Determining Force and Power in Cycling: A Review of Methods and Instruments for Pedal Force and Crank Torque Measurements. Int. SportsMed J. 2014, 15, 96–112. [Google Scholar]
- Bouillod, A.; Soto-Romero, G.; Grappe, F.; Bertucci, W.; Brunet, E.; Cassirame, J. Caveats and Recommendations to Assess the Validity and Reliability of Cycling Power Meters: A Systematic Scoping Review. Sensors 2022, 22, 386. [Google Scholar] [CrossRef]
- Sitko, S.; Cirer-Sastre, R.; Corbi, F.; López, I. Power Assessment in Road Cycling: A Narrative Review. Sustainability 2020, 12, 5216. [Google Scholar] [CrossRef]
- van der Kruk, E.; van der Helm, F.C.T.; Veeger, H.E.J.; Schwab, A.L. Power in Sports: A Literature Review on the Application, Assumptions, and Terminology of Mechanical Power in Sport Research. J. Biomech. 2018, 79, 1–14. [Google Scholar] [CrossRef]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends Supporting the In-Field Use of Wearable Inertial Sensors for Sport Performance Evaluation: A Systematic Review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [Green Version]
- Lintmeijer, L.L.; Faber, G.S.; Kruk, H.R.; van Soest, A.J.; Hofmijster, M.J. An Accurate Estimation of the Horizontal Acceleration of a Rower’s Centre of Mass Using Inertial Sensors: A Validation. Eur. J. Sport Sci. 2018, 18, 940–946. [Google Scholar] [CrossRef] [Green Version]
- van der Kruk, E.; den Braver, O.; Schwab, A.L.; van der Helm, F.C.T.; Veeger, H.E.J. Wireless Instrumented Klapskates for Long-Track Speed Skating. Sport. Eng. 2016, 19, 273–281. [Google Scholar] [CrossRef]
- Ohtonen, O.; Lindinger, S.; Lemmettylä, T.; Seppälä, S.; Linnamo, V. Validation of PorTable 2D Force Binding Systems for Cross-Country Skiing. Sport. Eng. 2013, 16, 281–296. [Google Scholar] [CrossRef]
- Rietveld, T.; Mason, B.S.; Goosey-Tolfrey, V.L.; van der Woude, L.H.V.; de Groot, S.; Vegter, R.J.K. Inertial Measurement Units to Estimate Drag Forces and Power Output during Standardised Wheelchair Tennis Coast-down and Sprint Tests. Sports Biomech. 2021, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Hogan, C.; Binnie, M.J.; Doyle, M.; Peeling, P. Quantifying Sprint Kayak Training on a Flowing River: Exploring the Utility of Novel Power Measures and Its Relationship to Measures of Relative Boat Speed. Eur. J. Sport Sci. 2022, 22, 1668–1677. [Google Scholar] [CrossRef] [PubMed]
- Macdermid, P.; Fink, P. The Validation of a Paddle Power Meter for Slalom Kayaking. Sports Med. Int. Open 2017, 1, E50–E57. [Google Scholar] [CrossRef] [Green Version]
- Baudouin, A.; Hawkins, D. Investigation of Biomechanical Factors Affecting Rowing Performance. J. Biomech. 2004, 37, 969–976. [Google Scholar] [CrossRef]
- Doyle, M.M.; Lyttle, A.; Elliott, B. Comparison of Force-Related Performance Indicators between Heavyweight and Lightweight Rowers. Sports Biomech. 2010, 9, 178–192. [Google Scholar] [CrossRef]
- Holt, A.C.; Hopkins, W.G.; Aughey, R.J.; Siegel, R.; Rouillard, V.; Ball, K. Concurrent Validity of Power from Three On-Water Rowing Instrumentation Systems and a Concept2 Ergometer. Front. Physiol. 2021, 12, 1960. [Google Scholar] [CrossRef]
- Conger, S.A.; Scott, S.N.; Bassett, D.R. Predicting Energy Expenditure through Hand Rim Propulsion Power Output in Individuals Who Use Wheelchairs. Br. J. Sports Med. 2014, 48, 1048–1053. [Google Scholar] [CrossRef]
- de Groot, S.; Vegter, R.J.K.; van der Woude, L.H.V. Effect of Wheelchair Mass, Tire Type and Tire Pressure on Physical Strain and Wheelchair Propulsion Technique. Med. Eng. Phys. 2013, 35, 1476–1482. [Google Scholar] [CrossRef]
- de Klerk, R.; Vegter, R.J.K.; Leving, M.T.; de Groot, S.; Veeger, D.H.E.J.; van der Woude, L.H.V. Determining and Controlling External Power Output during Regular Handrim Wheelchair Propulsion. J. Vis. Exp. 2020, e60492. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- van der Scheer, J.W.; de Groot, S.; Vegter, R.J.K.; Veeger, D.; van der Woude, L.H.V. Can a 15 M-Overground Wheelchair Sprint Be Used to Assess Wheelchair-Specific Anaerobic Work Capacity? Med. Eng. Phys. 2014, 36, 432–438. [Google Scholar] [CrossRef] [PubMed]
- Mason, B.S.; van der Woude, L.H.V.; Tolfrey, K.; Lenton, J.P.; Goosey-Tolfrey, V.L. Effects of Wheel and Hand-Rim Size on Submaximal Propulsion in Wheelchair Athletes. Med. Sci. Sports Exerc. 2012, 44, 126–134. [Google Scholar] [CrossRef] [PubMed]
- Kleshnev, V. Power in Rowing. In Proceedings of the 18 International Symposium on Biomechanics in Sport, Hong Kong, China, 25-30 June 2000. [Google Scholar]
- Gløersen, Ø.; Losnegard, T.; Malthe-Sørenssen, A.; Dysthe, D.K.; Gilgien, M. Propulsive Power in Cross-Country Skiing: Application and Limitations of a Novel Wearable Sensor-Based Method during Roller Skiing. Front. Physiol. 2018, 9, 1631. [Google Scholar] [CrossRef]
- Uddin, M.Z.; Seeberg, T.M.; Kocbach, J.; Liverud, A.E.; Gonzalez, V.; Sandbakk, Ø.; Meyer, F. Estimation of Mechanical Power Output Employing Deep Learning on Inertial Measurement Data in Roller Ski Skating. Sensors 2021, 21, 6500. [Google Scholar] [CrossRef] [PubMed]
- Hofmijster, M.J.; Lintmeijer, L.L.; Beek, P.J.; van Soest, A.J. Mechanical Power Output in Rowing Should Not Be Determined from Oar Forces and Oar Motion Alone. J. Sports Sci. 2018, 36, 2147–2153. [Google Scholar] [CrossRef]
- van Dijk, M.P.; van der Slikke, R.M.A.; Berger, M.A.M.; Hoozemans, M.J.M.; Veeger, D.H.E.J. Look Mummy, No Hands! The Effect of Trunk motion on Forward Wheelchair Propulsion. ISBS Proc. Arch. 2021, 39, 312. [Google Scholar]
- Chénier, F.; Pelland-Leblanc, J.-P.; Parrinello, A.; Marquis, E.; Rancourt, D. A High Sample Rate, Wireless Instrumented Wheel for Measuring 3D Pushrim Kinetics of a Racing Wheelchair. Med. Eng. Phys. 2021, 87, 30–37. [Google Scholar] [CrossRef]
- van Dijk, M.P.; Kok, M.; Berger, M.A.M.; Hoozemans, M.J.M.; Veeger, H.E.J. Machine Learning to Improve Orientation Estimation in Sports Situations Challenging for Inertial Sensor Use. Front. Sports Act. Living 2021, 3, 670263. [Google Scholar] [CrossRef]
- Noordhof, D.A.; Foster, C.; Hoozemans, M.J.M.; de Koning, J.J. Changes in Speed Skating Velocity in Relation to Push-Off Effectiveness. Int. J. Sports Physiol. Perform. 2013, 8, 188–194. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Vette, V.G.; Veeger, D.; van Dijk, M.P. Using Wearable Sensors to Estimate Mechanical Power Output in Cyclical Sports Other than Cycling—A Review. Sensors 2023, 23, 50. https://doi.org/10.3390/s23010050
de Vette VG, Veeger D, van Dijk MP. Using Wearable Sensors to Estimate Mechanical Power Output in Cyclical Sports Other than Cycling—A Review. Sensors. 2023; 23(1):50. https://doi.org/10.3390/s23010050
Chicago/Turabian Stylede Vette, Vera G., DirkJan (H. E. J.) Veeger, and Marit P. van Dijk. 2023. "Using Wearable Sensors to Estimate Mechanical Power Output in Cyclical Sports Other than Cycling—A Review" Sensors 23, no. 1: 50. https://doi.org/10.3390/s23010050
APA Stylede Vette, V. G., Veeger, D., & van Dijk, M. P. (2023). Using Wearable Sensors to Estimate Mechanical Power Output in Cyclical Sports Other than Cycling—A Review. Sensors, 23(1), 50. https://doi.org/10.3390/s23010050