

Correlations among Firing Rates of Tactile, Thermal, Gustatory, Olfactory, and Auditory Sensations Mimicked by Artificial Hybrid Fluid (HF) Rubber Mechanoreceptors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
3. Results and Discussion
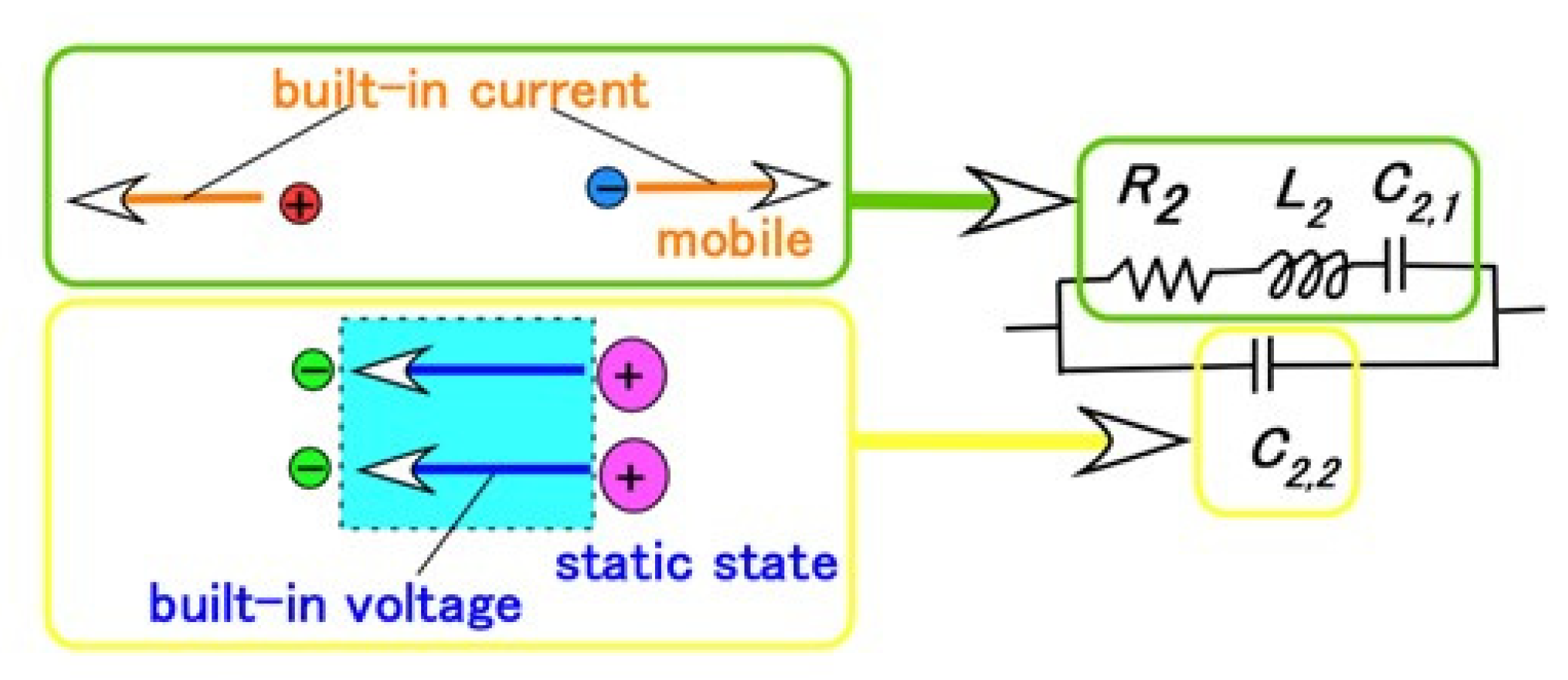
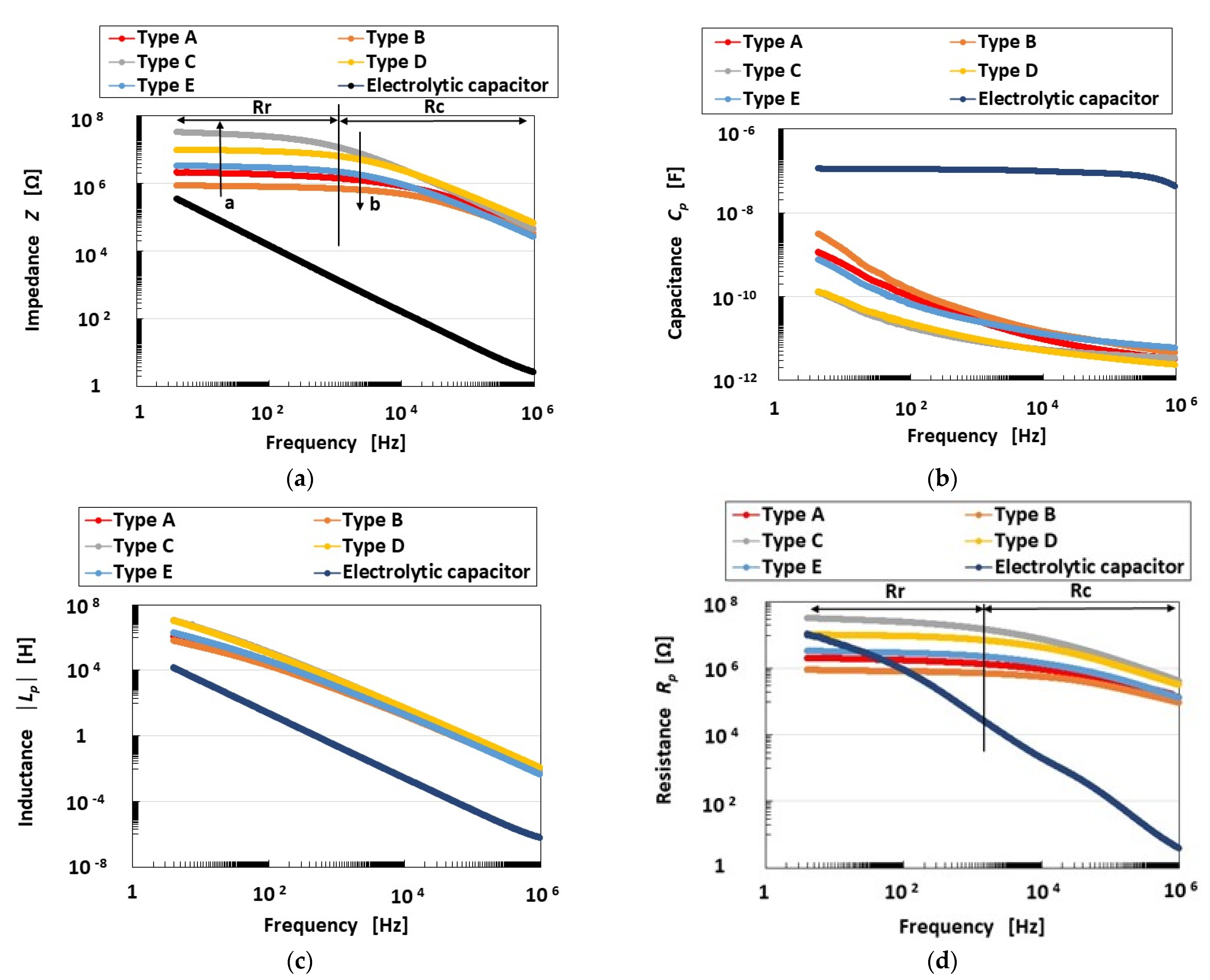
3.1. AC Electric Properties
3.2. Firing Rate
3.3. Thermal Sensation
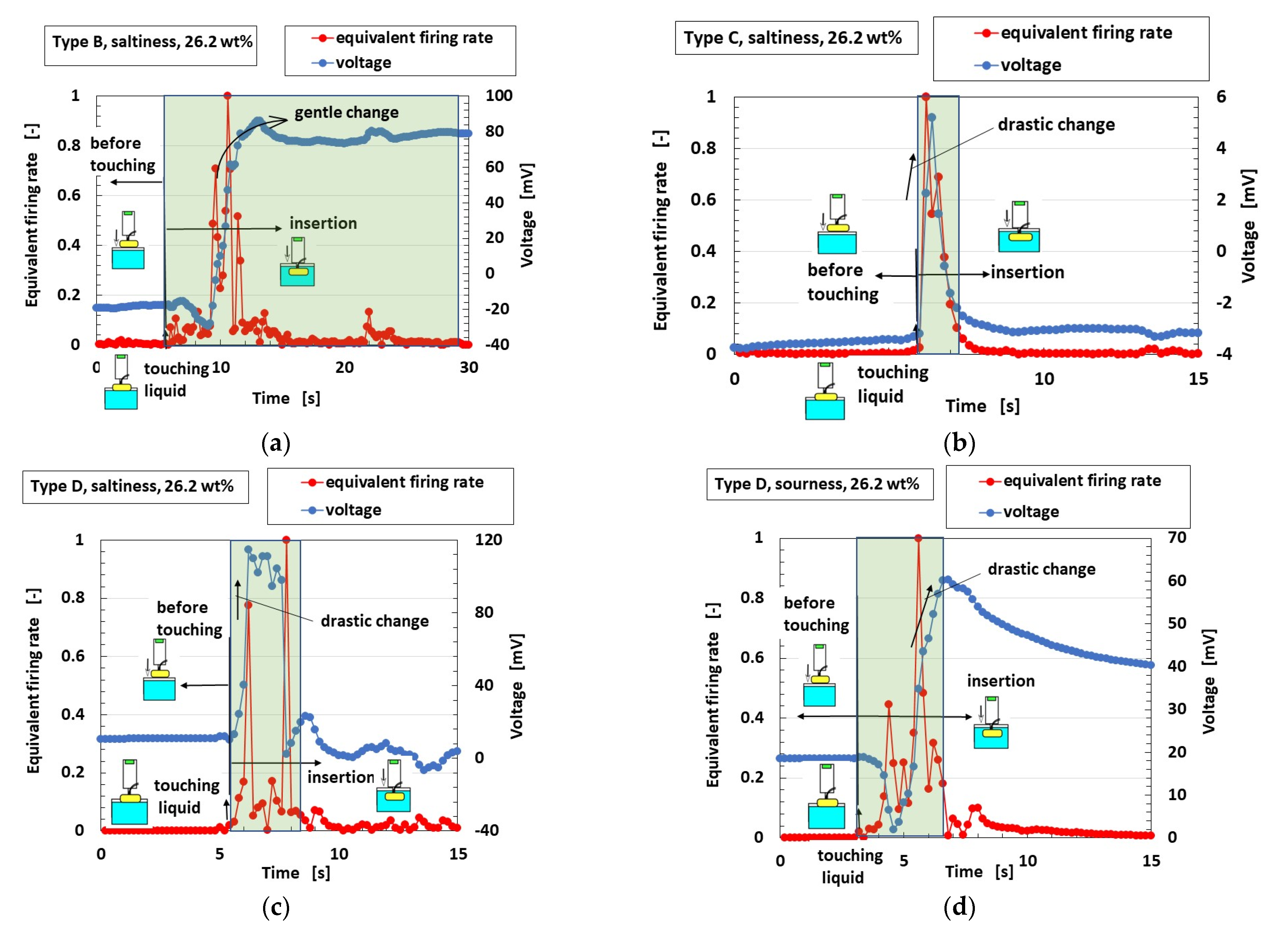
3.4. Gustation
3.5. Olfaction
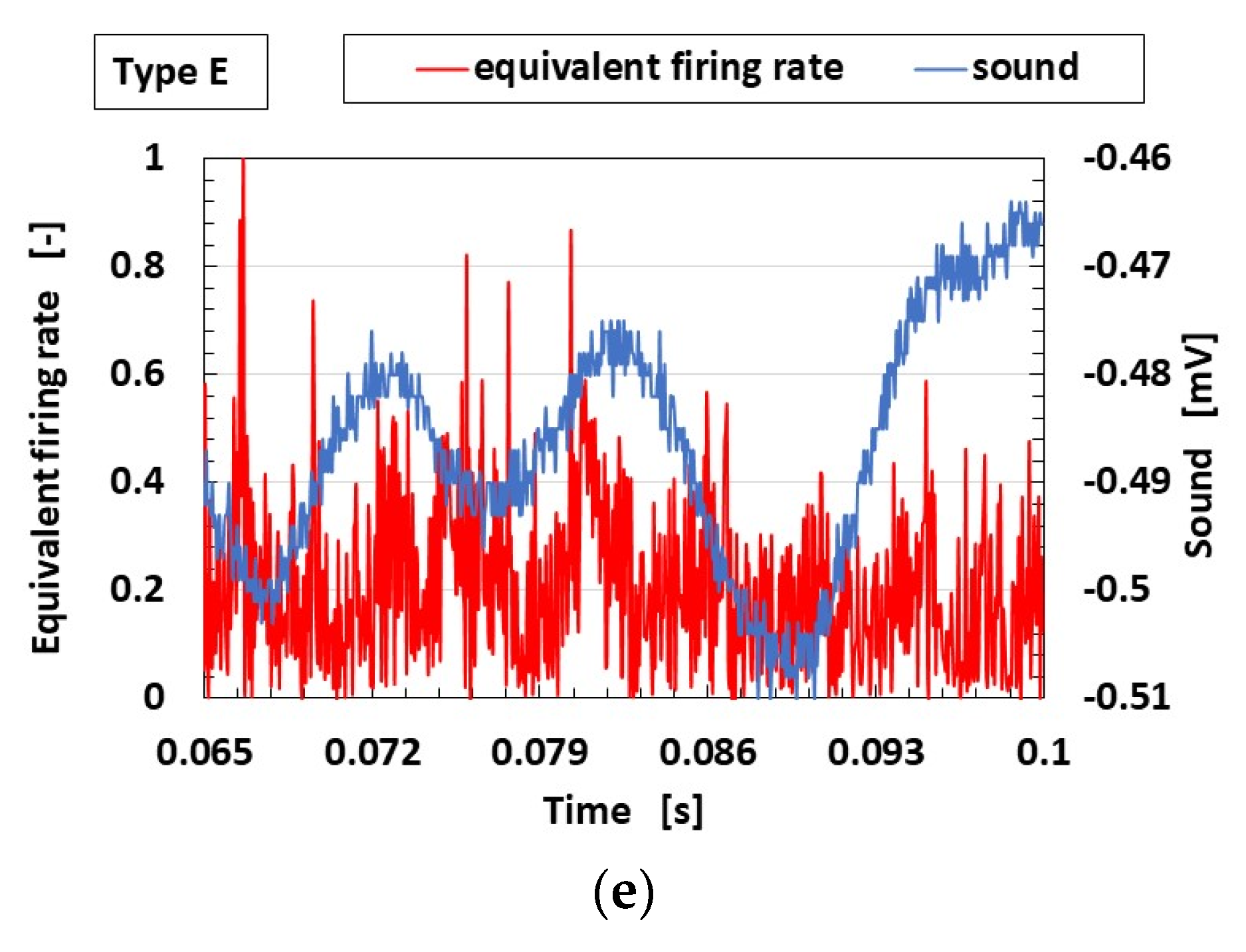
3.6. Auditory Sensation
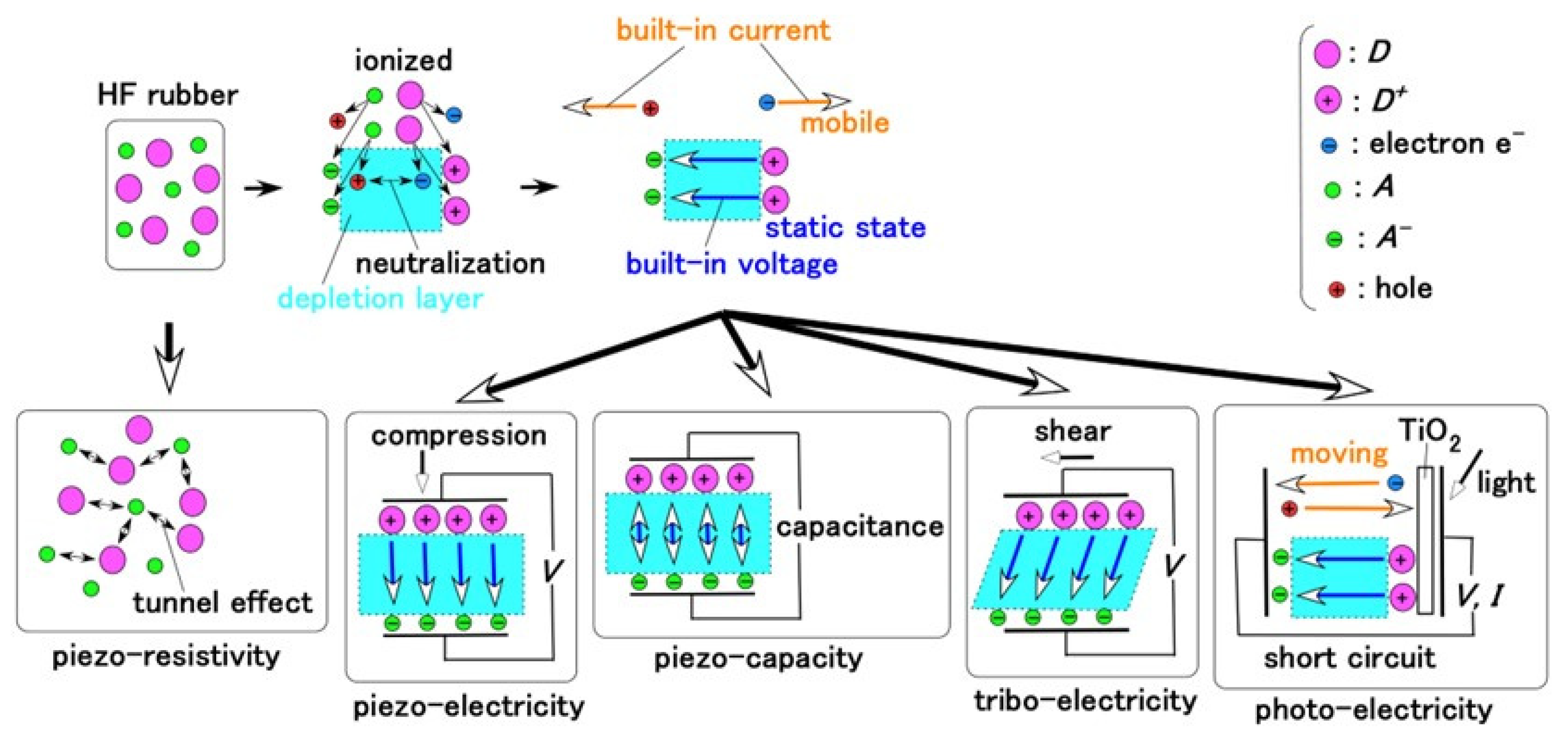
3.7. Consequence
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A





References
- Pang, Y.; Xu, X.; Chen, S.; Fang, Y.; Shi, X.; Deng, Y.; Wang, Z.L.; Cao, C. Skin-inspired textile-based tactile sensors enable multifunctional sensing of wearables and soft robots. Nano Energy 2022, 96, 107137. [Google Scholar] [CrossRef]
- Yang, R.; Zhang, W.; Tiwari, N.; Yan, H.; Li, T.; Cheng, H. Multimodal sensors with decoupled sensing mechanisms. Adv. Sci. 2022, 9, 2202470. [Google Scholar] [CrossRef] [PubMed]
- Gao, K.; Gao, F.; Du, L.; He, C.; Wan, H.; Wang, P. Integrated olfaction, gustation and toxicity detection by a versatile bioengineered cell-based biomimetic sensor. Bioelectrochemistry 2019, 128, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Svechtarova, M.I.; Buzzacchera, I.; Toebes, B.J.; Lauko, J.; Anton, N.; Wilson, C.J. Sensor devices inspired by the five senses: A review. Electroanalysis 2016, 28, 1201–1241. [Google Scholar] [CrossRef]
- Li, W.D.; Ke, K.; Jia, J.; Pu, J.H.; Zhao, X.; Bao, R.Y.; Liu, Z.Y.; Bai, L.; Zhang, K.; Yang, M.B.; et al. Recent advances in multiresponsive flexible sensors towards e-skin: A delicate design for versatile sensing. Small 2021, 18, 2103734. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, C.; Zhu, Y.; Ju, S.; Ma, F.; Guo, T.; Li, F.; Kim, W. Bio-inspired smart electronic-skin based on inorganic perovskite nanoplates for application in photomemories and mechanoreceptors. Nanoscale 2021, 13, 253–260. [Google Scholar] [CrossRef]
- Shimada, K. Morphological configuration of sensory biomedical receptors based on structures integrated by electric circuits and utilizing magnetic-responsive hybrid fluid (HF). Sensors 2022, 22, 9952. [Google Scholar] [CrossRef]
- Munger, B.L.; Ide, C. The structure and function of cutaneous sensory receptors. Arch. Histol. Cytol. 1988, 51, 1–34. [Google Scholar] [CrossRef]
- Hongye, C.; Zhou, Y. Introduction to tactile sensors. In Materials, Devices and Integrations; Hongye, C., Zhou, Y., Eds.; Woodhead Publishing: Duxford, UK, 2021. [Google Scholar]
- Wang, X.; Bai, Z.; Zheng, M.; Yue, O.; Hou, M.; Cui, B.; Su, R.; Wei, C.; Liu, X. Engineered gelatin-based conductive hydrogels for flexible wearable electronic devices: Fundamentals and recent advances. J. Sci. Adv. Mat. Devices 2022, 7, 100451. [Google Scholar] [CrossRef]
- Ye, W.; Lin, J.; Zhang, X.; Lian, Q.; Liu, Y.; Wang, H.; Wu, S.; Chen, H.; Guo, T. Self-powered perception system based on triboelectric nanogenerator and artificial neuron for fast-speed multilevel feature recognition. Nano Energy 2022, 100, 107525. [Google Scholar] [CrossRef]
- Zheng, Z.; Yang, L.; Yang, Y.; Li, L.; Lin, B.; Fu, L.; Xu, C. Flexible, sensitive and rapid humidity-responsive sensor based on rubber/aldehyde-modified sodium carboxymethyl starch for human respiratory detection. Carbohydr. Poly. 2023, 306, 120625. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Liu, G.; Li, H.; Yuan, W.; Guo, S. A conformable, durable, adhesive welded fiber mate for on-skin strain sensing. Chem. Eng. J. 2023, 457, 141233. [Google Scholar] [CrossRef]
- Tomar, R. Review: Methods of firing rate estimation. BioSystems 2019, 183, 103980. [Google Scholar] [CrossRef] [PubMed]
- Nezhad, N.; Amiri, M.; Falotico, E.; Laschi, C. A digital hardware realization for spiking model of cutaneous mechanoreceptor. Fron. Neur. 2018, 12, 322. [Google Scholar] [CrossRef] [PubMed]
- Hamann, W. Mammalian cutaneous mechanoreceptors. Prog. Biophys. Mol. Biol. 1995, 64, 81–104. [Google Scholar] [CrossRef] [PubMed]
- Tiwana, M.I.; Redmond, S.J.; Lovell, N.H. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuators A Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Wang, Q.; Fan, C.; Gui, Y.; Zhang, L.; Zhang, J.; Sun, L.; Wang, K.; Han, Z. Engineered mechanosensors inspired by biological mechanosensilla. Adv. Mater. 2021, 6, 2100352. [Google Scholar] [CrossRef]
- Burek, M.; Follmann, R.; Rosa, E. Temperature effects on neuronal firing rates and tonic-to-bursting transitions. Biosystems 2019, 180, 1–6. [Google Scholar] [CrossRef]
- Li, A.; Guthman, E.M.; Doucette, W.T.; Restrepo, D. Behavioral status influences the dependence of odorant-induced changes in firing on prestimulus firing rate. J. Neurosci. 2017, 37, 1835–1852. [Google Scholar] [CrossRef]
- Partouche, E.; Adenis, V.; Gnansia, D.; Stahl, P.; Edeline, J.M. Increased threshold and reduced firing rate of auditory cortex neurons after cochlear implant insertion. Brain Sci. 2022, 12, 205. [Google Scholar] [CrossRef]
- Kobayakawa, T.; Gotow, N. Interaction between olfaction and gustation by using synchrony perception task. i-Perception 2011, 2, 964. [Google Scholar] [CrossRef]
- Gotow, N.; Kobayakawa, T. Simultaneity judgment using olfactory-visual, visual-gustatory, and olfactory-gustatory combinations. PLoS ONE 2017, 12, e0174958. [Google Scholar] [CrossRef] [PubMed]
- Shimada, K. Estimation of fast and slow adaptions in the tactile sensation of mechanoreceptors mimicked by hybrid fluid (HF) rubber with equivalent electric circuits and properties. Sensors 2023, 23, 1327. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Ru, S.; Li, H.; Wang, G.; Xu, S. Laser-structured microarray electrodes for durable stretchable lithium-ion battery. J. Colloid Interface Sci. 2023, 631, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Malti, A.; Edberg, J.; Granberg, H.; Khan, Z.U.; Andreasen, J.W.; Liu, X.; Zhao, D.; Zhang, H.; Yao, Y.; Brill, J.W.; et al. An organic mixed ion-electron conductor for power electronics. Adv. Sci. 2016, 3, 1500305. [Google Scholar] [CrossRef]
- Shin, L.; Zhu, T.; Gao, G.; Zhang, X.; Wei, W.; Liu, W.; Ding, S. Highly stretchable and transparent ionic conducting elastomers. Nat. Commun. 2018, 9, 2630. [Google Scholar]
- Matsuda, R.; Isano, Y.; Ueno, K.; Ota, H. Highly stretchable and sensitive silicone composites with positive piezoconductivity using nickel powder and ionic liquid. APL Bioeng. 2023, 7, 16108. [Google Scholar] [CrossRef]
- Chun, K.Y.; Son, Y.J.; Jeon, E.S.; Lee, S.; Han, C.S. A self-powered sensor mimicking slow- and fast-adapting cutaneous mechanoreceptors. Adv. Mater. 2018, 30, 1706299. [Google Scholar] [CrossRef]
- Ladhar, A.; Arous, M.; Kaddami, H.; Raihane, M.; Lahcini, M.; Kallel, A.; Graca, M.P.F.; Costa, L.C. Dielectric relaxation studies on nanocomposites of rubber with nanofibrillated cellulose. J. Non-Crys. Solids 2013, 378, 39–44. [Google Scholar] [CrossRef]
- Ladhar, A.; Arous, M.; Kaddami, H.; Raihane, M.; Kallel, A.; Graca, M.P.F.; Costa, L.C. AC and DC electrical conductivity in natural rubber/nanofibrillated cellulose nanocomposites. J. Mol. Liquids 2015, 209, 272–279. [Google Scholar] [CrossRef]
- Kim, T.Y.; Suh, W.; Jeong, U. Approaches to deformable physical sensors: Electronic versus iontronic. Mater. Sci. Eng. R. Rep. 2021, 146, 100640. [Google Scholar] [CrossRef]
- Ohayon, D.; Druet, V.; Inal, S. A guide for the characterization of organic electrochemical transistors and channel materials. Chem. Soc. Rev. 2023, 52, 1001–1023. [Google Scholar] [CrossRef] [PubMed]
- Shimada, K. Artificial tongue embedded with conceptual receptor for rubber gustatory sensor by electrolytic polymerization technique with utilizing hybrid fluid (HF). Sensors 2022, 22, 6979. [Google Scholar] [CrossRef] [PubMed]
















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shimada, K. Correlations among Firing Rates of Tactile, Thermal, Gustatory, Olfactory, and Auditory Sensations Mimicked by Artificial Hybrid Fluid (HF) Rubber Mechanoreceptors. Sensors 2023, 23, 4593. https://doi.org/10.3390/s23104593
Shimada K. Correlations among Firing Rates of Tactile, Thermal, Gustatory, Olfactory, and Auditory Sensations Mimicked by Artificial Hybrid Fluid (HF) Rubber Mechanoreceptors. Sensors. 2023; 23(10):4593. https://doi.org/10.3390/s23104593
Chicago/Turabian StyleShimada, Kunio. 2023. "Correlations among Firing Rates of Tactile, Thermal, Gustatory, Olfactory, and Auditory Sensations Mimicked by Artificial Hybrid Fluid (HF) Rubber Mechanoreceptors" Sensors 23, no. 10: 4593. https://doi.org/10.3390/s23104593
APA StyleShimada, K. (2023). Correlations among Firing Rates of Tactile, Thermal, Gustatory, Olfactory, and Auditory Sensations Mimicked by Artificial Hybrid Fluid (HF) Rubber Mechanoreceptors. Sensors, 23(10), 4593. https://doi.org/10.3390/s23104593