1. Introduction
An eddy current sensor is a contactless sensor [
1]. When a high-frequency AC signal flows through the coil of the sensor, an alternating magnetic field is generated around the coil. An eddy current is induced within a nearby conductor by the alternating magnetic field, which generates another magnetic field in the opposite direction of the coil. The interaction between the magnetic field of the coil and the eddy current changes the AC impedance of the sensor coil. The distance between the detector coil and the metal being tested is proportional to the coupling strength of the magnetic field, so the displacement of the target conductor can be obtained by measuring the AC impedance [
2,
3]. However, the disadvantage of an eddy current sensor is that there is a large temperature drift. Because the eddy current sensor is essentially an impedance measurement circuit, the coil of the sensor, and the impedance and resistivity of the metal to be measured, will change with temperature, which will affect the measurement [
4,
5,
6].
Scholars in the field of overcoming the temperature drift of eddy current sensors typically employ two methods. The first approach is data processing, which leverages prior knowledge and algorithms to post-calibrate the sensor’s output data and enhance its precision. For example, a temperature compensation method based on binary regression was proposed by Lei et al. to reduce the temperature drift effect, which minimized the maximum relative error from 169.08% to 9.13% [
7].
He et al. proposed an external compensation approach by applying mathematical fitting to realize temperature drift compensation, and it improved the temperature compensation accuracy to 0.25% [
8].
The second method involves incorporating a self-compensation module into the design of the eddy current sensor, thereby using circuit design to achieve temperature compensation and enhance the accuracy of the output. For example, Li and Ding designed a new displacement eddy current sensor for high-voltage applications that incorporated a simple temperature drift compensation method through the use of a non-inductive compensation coil, which reduced temperature drift from 12% to 0.7% within the temperature range of 20 to 90 °C [
9].
The temperature drift of the sensor impedance due to the temperature change in the probe coil and the measured target environment has been thoroughly discussed. Wang et al. concluded that the coil’s resistance was the primary cause of the temperature drift. They proposed a new integrated self-temperature-compensation method that leveraged signal processing of the sensing coil to achieve an ultra-low temperature drift of 4 nm/°C [
10].
Wang and Feng also designed an innovative bridge circuit and combined self-calibration and impedance-based signal processing methods to significantly reduce the temperature drift of the eddy current sensor by two orders of magnitude. The thermal drift of the sensor was only 2.6 nm/°C [
5].
Zheng et al. designed a special mechanical structure and a corresponding sensor compensation circuit to address the exponential temperature drift caused by an air gap, metal material, and probe coils in high-temperature applications. The proposed compensation method reduced the exponential hysteresis temperature drift errors by 79.65% for a temperature rise of 80 K and by 85.04% for a temperature rise of 320 K [
11].
Based on a constant-current circuit and a temperature coefficient parameter method, Wang et al. designed a displacement sensor with a temperature compensation function, which achieved a temperature drift rate of ±0.96 µm/°C within the temperature range of 40 °C to 55 °C [
12].
The data post-calibration method can enhance the accuracy of the data, but the procedure is complex and necessitates individual data collection and processing for each sensor. The use of compensation circuits in sensors can often improve accuracy and reduce temperature drift, but it may also limit the measurement range. Additionally, the impact of the temperature characteristics of each electronic component in the demodulation circuit has not been thoroughly evaluated and compensated. Herein, a method suitable for reducing the temperature drift of the sensor in a wide-range temperature environment is proposed, significantly improving the temperature stability of the eddy current displacement sensor. The proposed method utilizes the sensor structure of differential dual probes to offset the traditional temperature drift caused by the coil, the target metal, and the cable. Moreover, high-speed analog-to-digital sampling is performed on the demodulated signal, and the double-correlation demodulation algorithm is employed in the digital processor to process the amplitude and phase of the sensor. The sensor designed based on the above ideas achieved a maximum static stability accuracy of ±1 Digital Number (DN) with a system bandwidth of up to 25 kHz. The temperature drift rate was found to be ±0.00137% FS/°C when the temperature was increased from −40 °C to +50 °C, making this method flexible, reliable, and convenient for applications with a wide temperature range.
3. System Error Analysis
3.1. Influence of Accumulation Cycle and Sampling Frequency on Output Accuracy
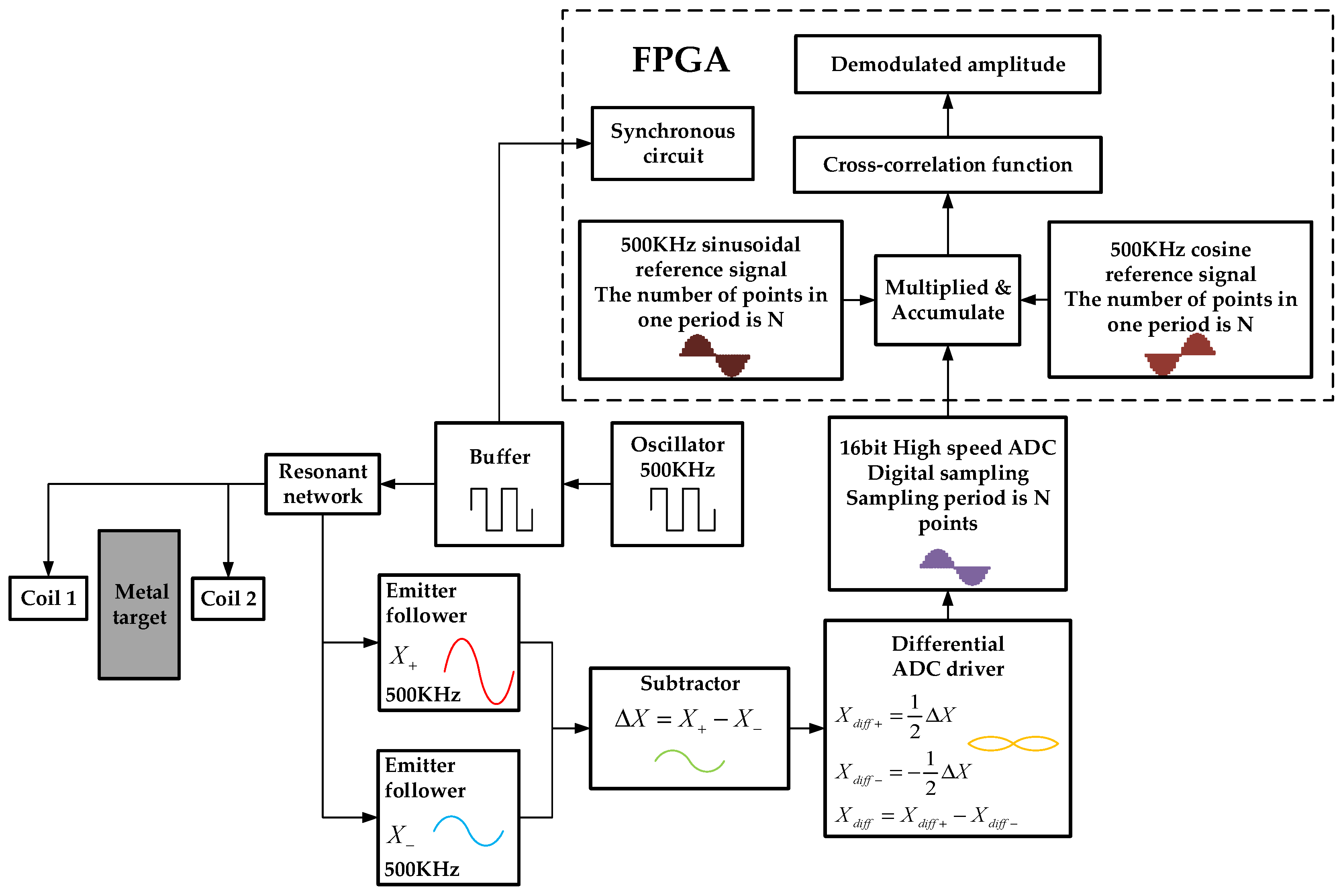
The essential task of the cross-correlation function in the digital correlation demodulation algorithm is to calculate the cumulative averages of the input signal and the reference signal, which makes it equivalent in function to a low-pass filter. Because the noise item has no correlation with the reference signal, the cross-correlation function is 0. Its output is related only to the input signal and the local reference signal. However, the elimination of the noise term in the digital correlation demodulation algorithm presupposes that the averaging time is of adequate length, as data accuracy can be compromised when the algorithm does not accumulate enough data.
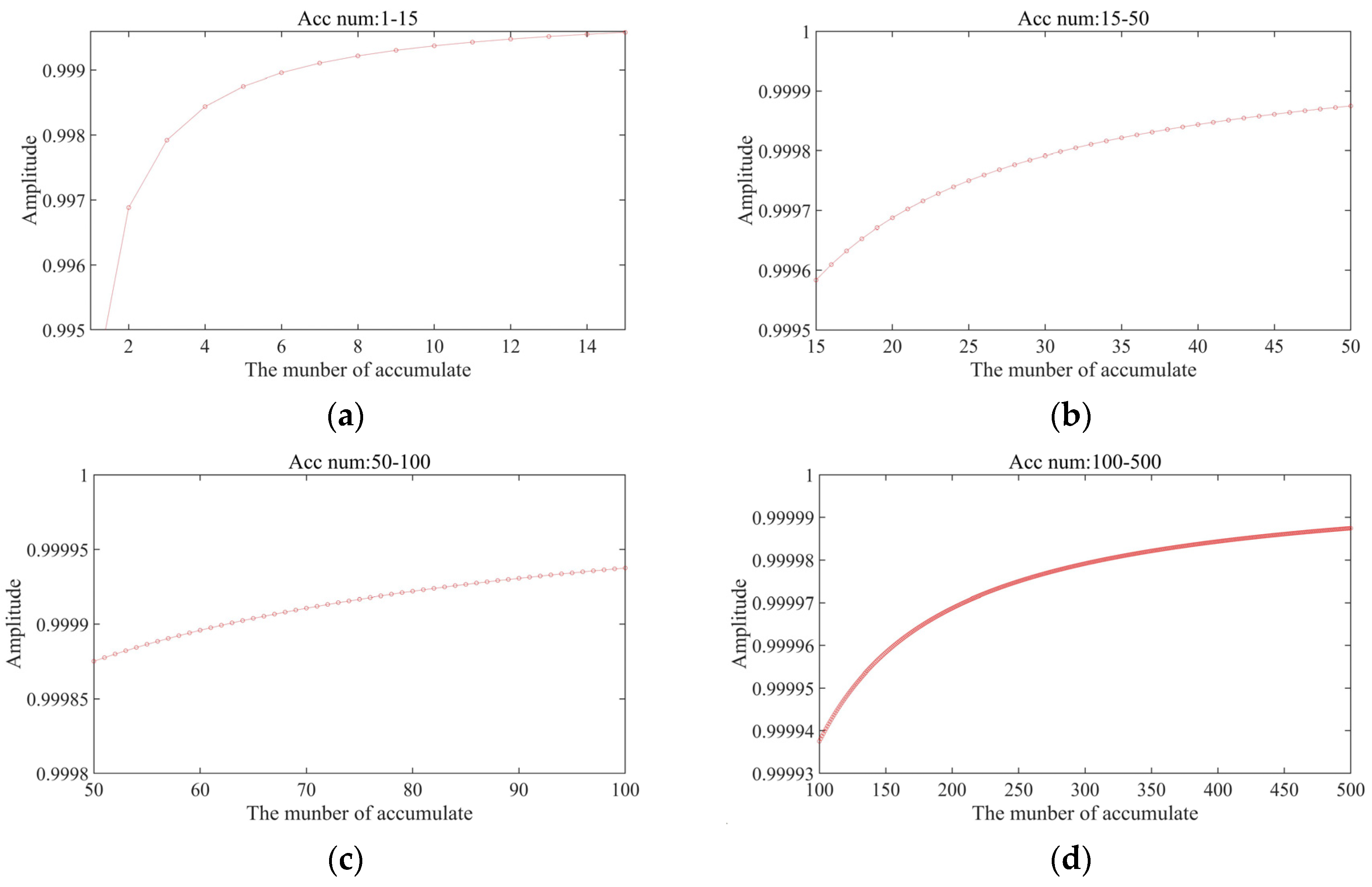
Figure 4 illustrates the effect of extending the accumulation period. The initial amplitudes of both the input signal and the reference signal of the same frequency are 1, and the number of accumulation cycles in the algorithm is gradually increased. As up to 15 cycles are accumulated, the output accuracy of the system greatly increases. As 15–50 cycles are accumulated, accuracy increases by up to 0.02%. As 50–100 cycles are accumulated, accuracy increases by <0.01%. As 100–500 cycles are accumulated, accuracy increases by <0.0005%. In a digital system, the accumulation period is inversely proportional to the system output frequency. Choosing a suitable accumulation period can therefore balance the data-updating frequency with the degree of accuracy.
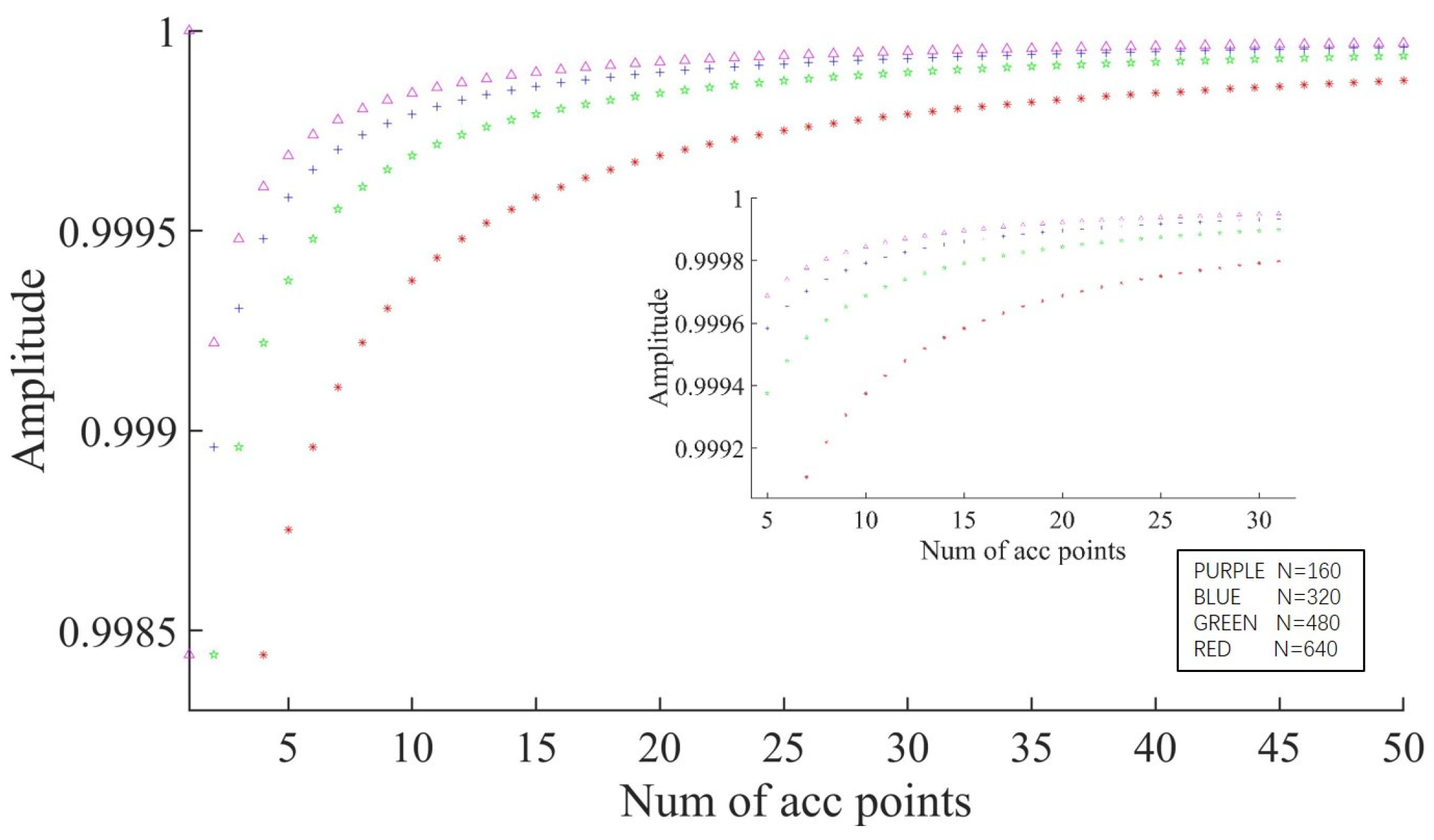
It can be seen from Equation (14) that the sampling frequency of the ADC is also a factor that influences output accuracy. A high sampling frequency obtains more discrete points in one cycle, and more discrete points can accelerate the convergence of the algorithm as follows. We set the number of sampling points to the four values 160, 320, 480 and 640, and plotted the calculated values corresponding to each of the four values for 1–50 accumulation cycles, as shown in
Figure 5. From the figure, we can see the influence of the sampling cycle on the convergence speed and the accuracy of the algorithm.
It can be seen from
Figure 5 that when the accumulated length is 15 cycles and the number of sampling points increases from 160 to 640, the accuracy of the output amplitude increases by 0.04%. However, as the number of accumulated cycles increases, the influence of the number of sampling points on the accuracy gradually decreases.
The sampling frequency of the ADC in the system cannot be increased infinitely as it is limited by the performance of the fabricated ADC. As an example, if the sampling frequency of an ADC with a maximum sampling frequency of 250 MHz is set to 240 MHz, then an input signal of 500 kHz will provide 480 sampling points in one cycle.
3.2. Influence of Frequency Stability on Accuracy
Another factor that affects system accuracy is the stability of the input signal frequency. The frequencies of the data signal and the reference signal are required to be equal and strictly constant. If the two frequencies are not equal, the accuracy of the output signal will be greatly affected.
Correlation-based demodulation requires that the frequency difference between the reference signal and the measured signal should be 0. The reference frequency is fixed, while the measured frequency may vary within a small range around the reference frequency. Let the reference signal be
and let the measured signal be
Assuming that there is no frequency difference between the two signals, the result of multiplying the two signals is
After multiplication, the two frequency components are obtained. The structure of the digital demodulation system is such that after multiplying the frequency, the components will be attenuated by the low pass filter, and thus the output of the demodulator is the difference in frequency between the signal components. The amplitude–frequency characteristic formula of the low pass filter is
When , i.e., when , reaches its maximum value. When there is a difference between the measured signal and the reference signal, the correlation-based demodulation output amplitude will decrease.
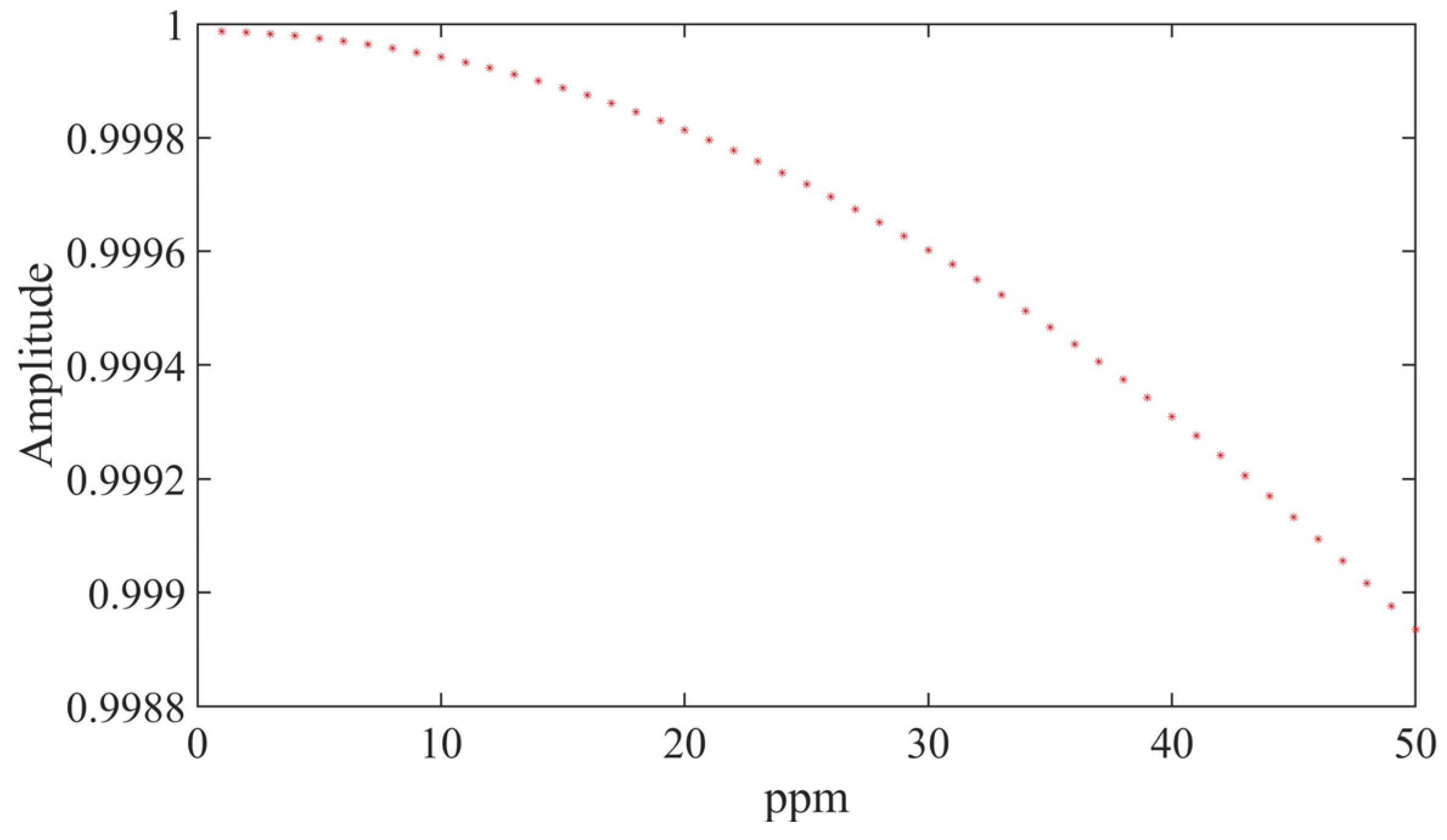
In Equation (21), parameters such as the number of sampling points, the amplitude of the reference signal (which is set equal to 1), and the accumulation period remain constant. Only the frequency of the sampled signal is varied, with each sampling point being changed by 5 parts per million (ppm). By doing so, the relationship between frequency variation and output accuracy can be determined.
Figure 6 shows the influence of temperature drift on the output accuracy of the measured signal. When the temperature drift of the measured signal reaches 10 ppm, the corresponding output error will be in the order of 0.01%, and when the temperature drift reaches 50 ppm, the system output error will be in the order of 0.1%.
3.3. Influence of Other Factors
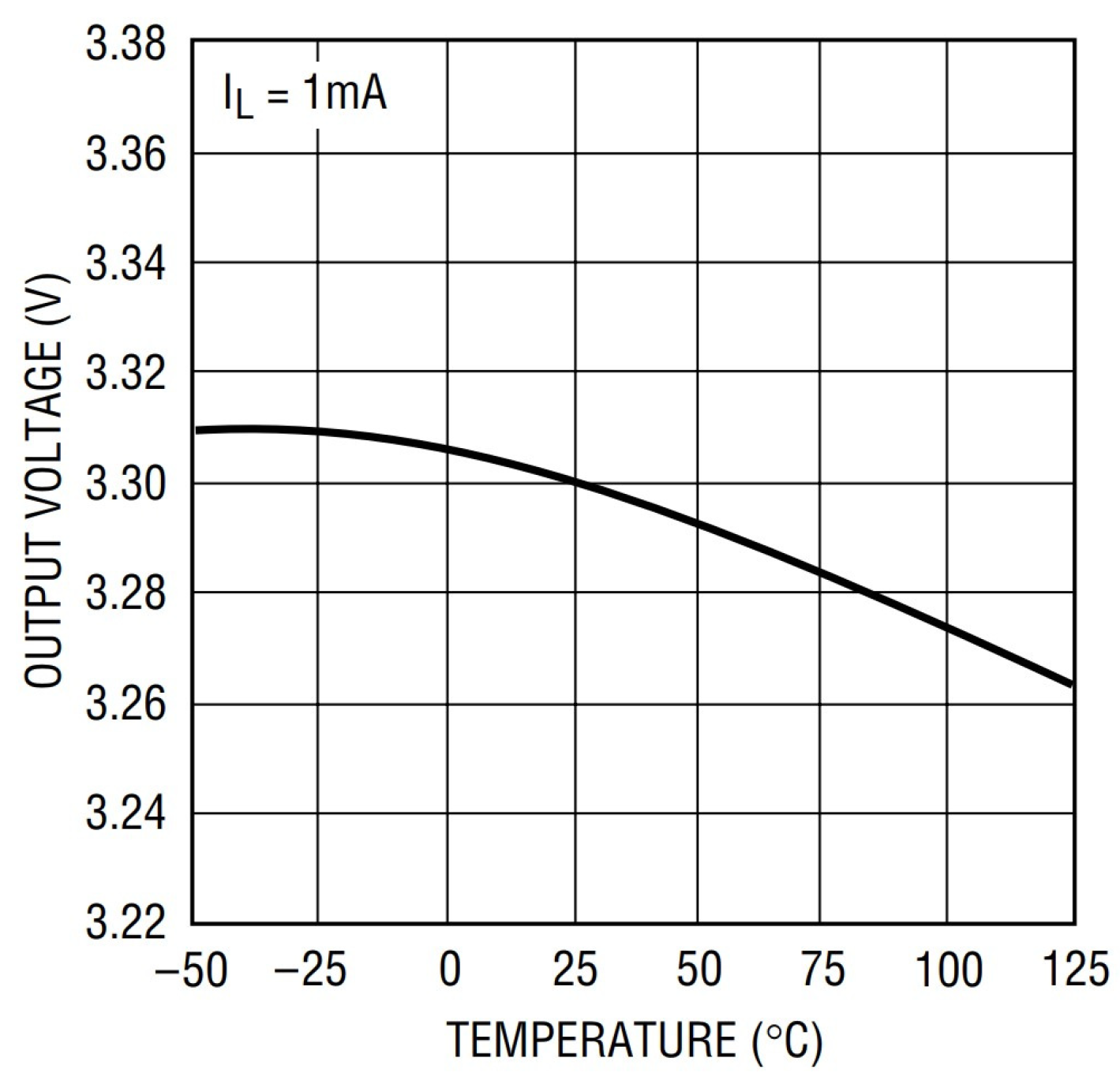
It can be seen from Equation (1) that the amplitude of the driving signal is proportional to the amplitude of the output signal when all other factors in the system are held constant. The amplitude of the driving signal is determined by the amplitude of the positive voltage power supply. The output amplitude of the power supply will change with temperature, and when the temperature changes, the amplitude of the driving signal will also change. The linear relationship between the driving signal and the output signal ensures that the output signal will eventually be affected by temperature changes.
Figure 7 shows that the output curve of a typical LDO power supply drifts as the temperature changes [
19]. When the temperature changes from −40 °C to +50 °C, the amplitude of the power supply changes by 0.03 V. The 16-bit high-speed ADC, with a full-scale range of 2.5 V, will cause a change of 787 DN, although in the differential system we developed, the driving signals of the two sensor probes have the same trend and magnitude of amplitude, and the common mode interference is eliminated after subtraction. However, due to the nonlinearity of sensor factors, the differential signal obtained by the system will also be affected by the change in amplitude.
In addition, due to the differential circuit structure of the system, there will be temperature-drift effects on the sensor coil impedance, the resistivity of the conductor being tested, the distributed parameter impedance of the sensor coaxial cable, and the cache op-amp, which can all be recognized as common-mode interference and so rejected by the differential system.
4. Experimental Verification
In this section, we describe the construction of an experimental device to test the performance of the sensor and the experimental testing of the sensor. Testing included static stability testing, linearity testing, resolution and sensitivity testing, and temperature-stability testing.
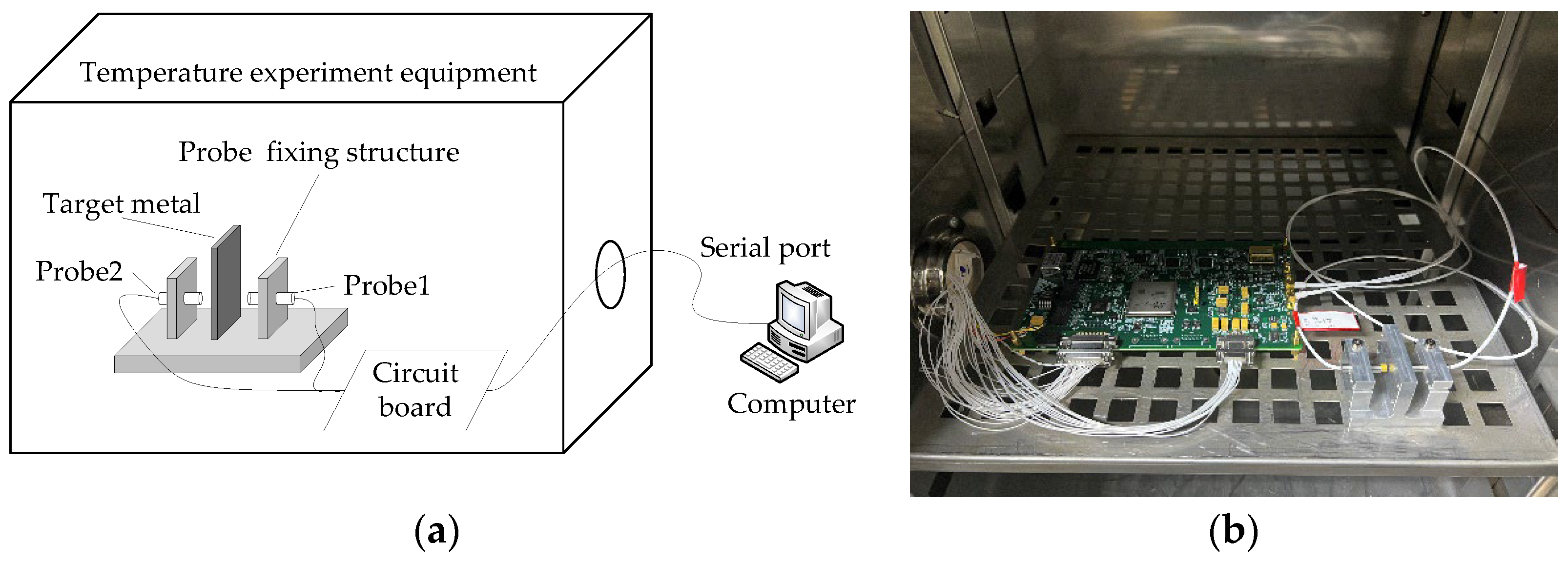
4.1. Experimental Device Construction
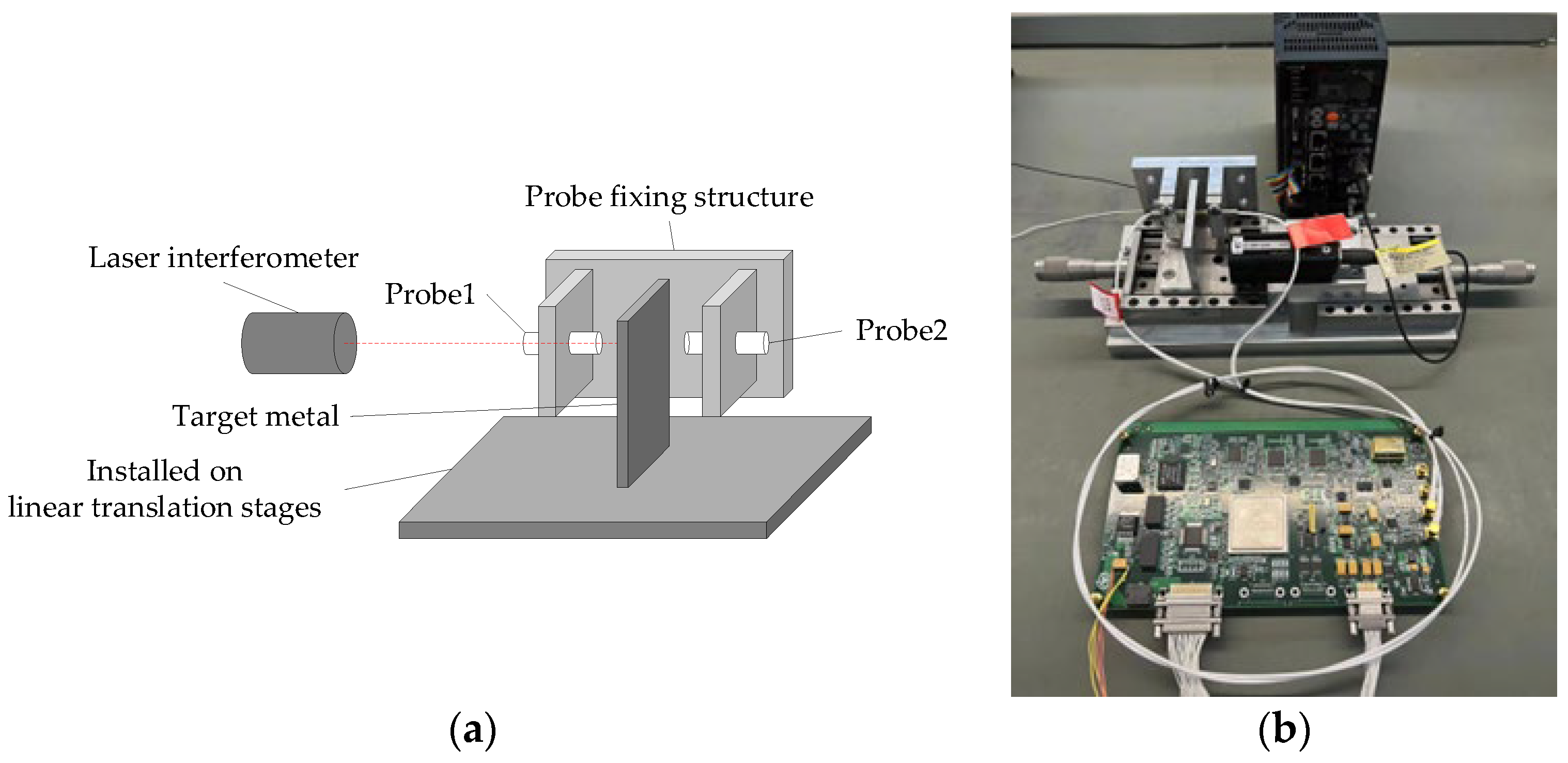
Figure 8 shows that the experimental device consisted principally of a one-dimensional displacement-adjustment platform, a sensor probe fixing structure, a driving mechanism, and a laser autocollimator.
The process for setting up the test equipment was as follows. One sensor probe was fixed to the mount. Using the position of the sensor as the starting point, the laser autocollimator was used to adjust the position of the metal plate being tested with respect to the sensor, and when the desired distance had been set, the other sensor probe was affixed. The metal plate being tested was then centralized between the two probes. In the measurement experiment, we set the sensor–plate distances to 2.5 mm. The model of the laser interferometer probe used in this experiment was OMRON ZW-S20, which had a measurement accuracy of 20 nm and a measurement range of 20 ± 1 mm. The metal specimen to be tested was mounted on a micro-displacement platform, specifically the M-UMR8.25 model. The micro-displacement platform was equipped with a differential micrometer, which provided an accuracy of 0.1 μm.
4.2. Drive Signal and Resonance Signal Measurement
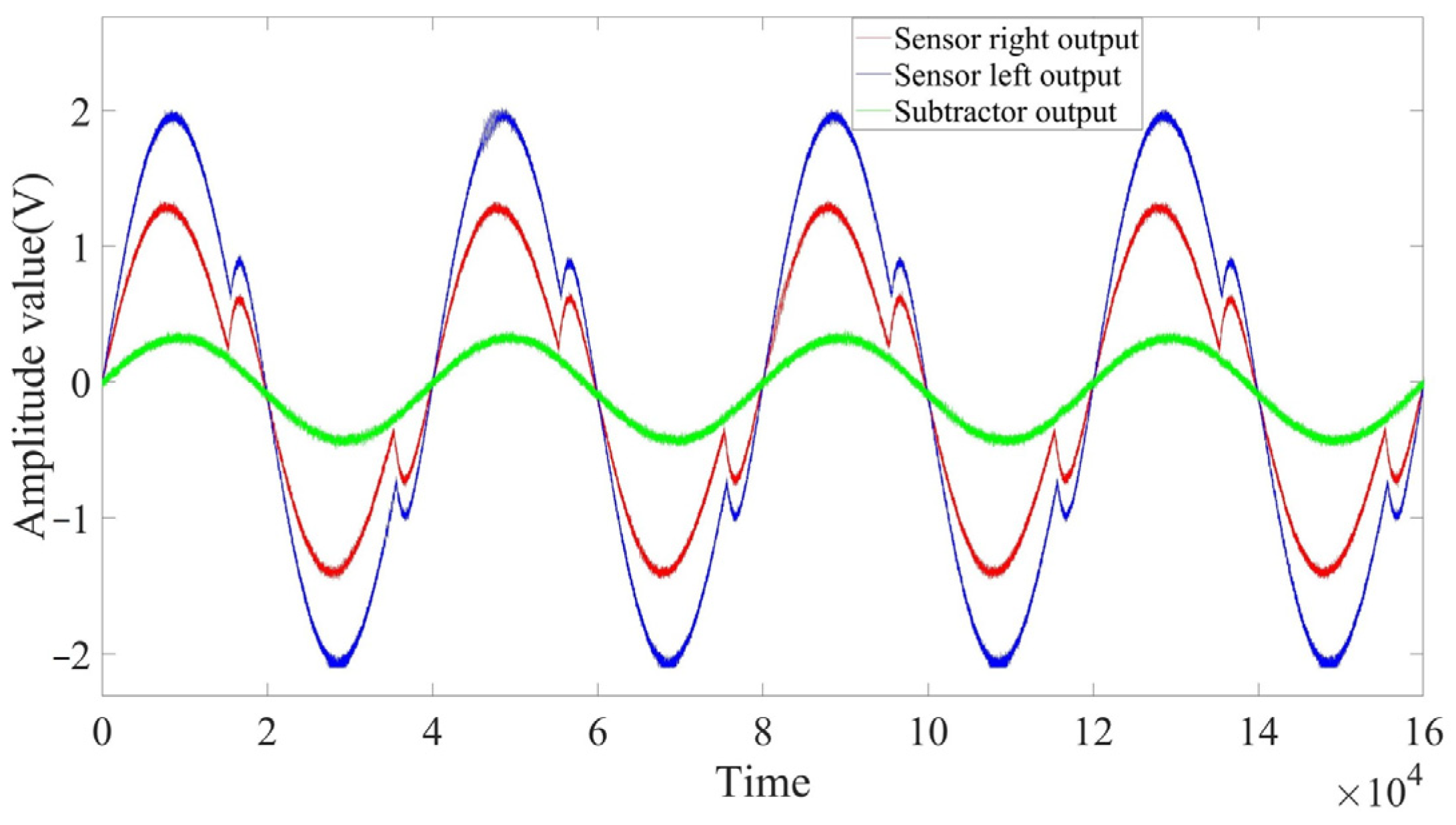
The clock signal after frequency division was input to the sensor coil, and the differential probe returned carrier signals with the same frequency but with different amplitudes, according to the difference in inductive impedance. One signal was subtracted from the other to produce the signal that was to be demodulated. In
Figure 9, the red carrier signal was subtracted from the blue signal to give the green signal that was demodulated, and the three signals had the same frequency.
4.3. Static Stability, Linearity Measurement
4.3.1. Static Stability Test
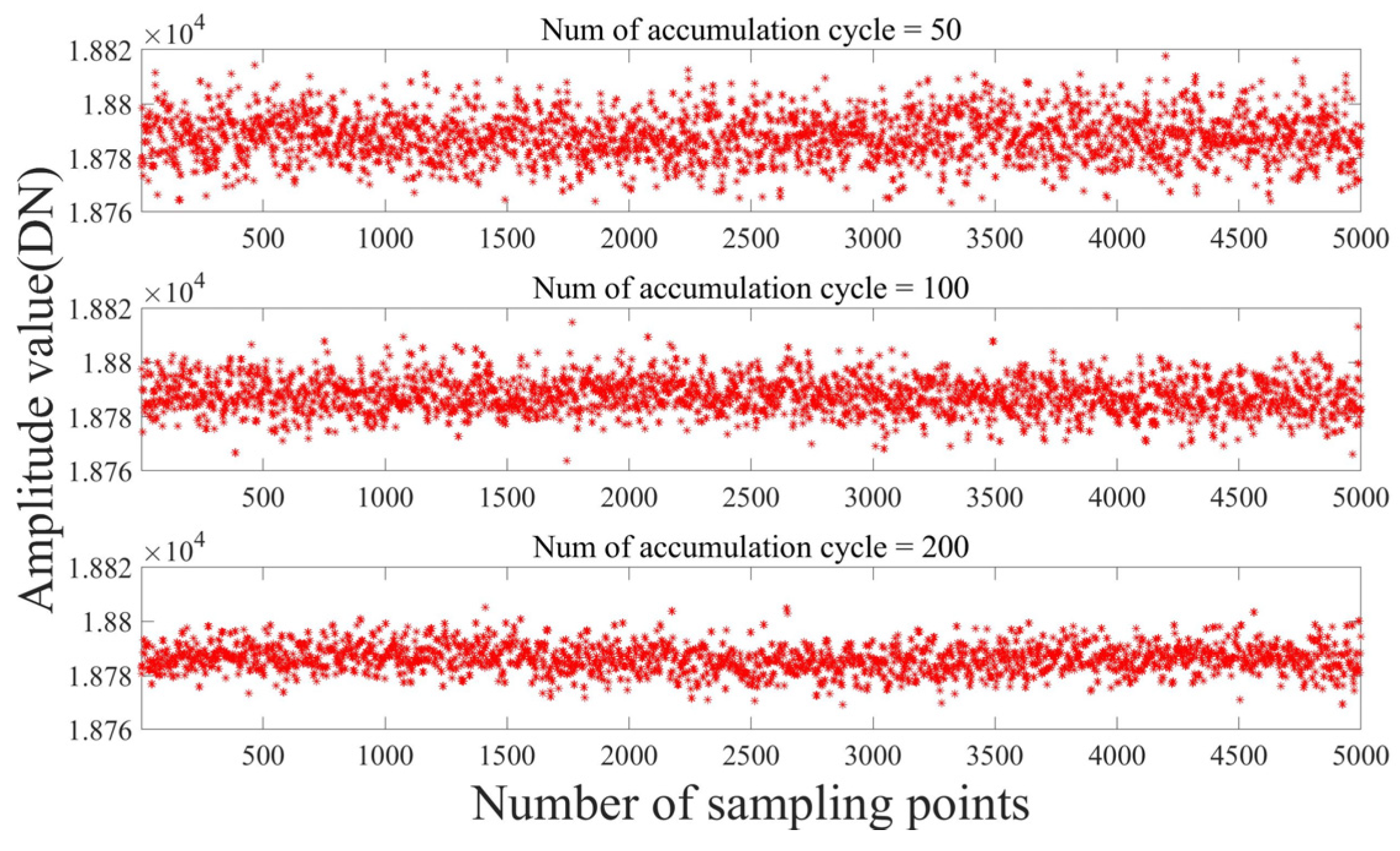
We maintain the stability of the object under examination and vary the accumulation cycle in the algorithm to analyze the output data of the system.
Figure 10 shows the static stability of the system. This is consistent with the conclusions of the previous analysis. The accuracy of the system output was proportional to the number of accumulation cycles, and as the number of accumulation cycles increased, the convergence of the calculated points on the
Y-axis increased. However, the number of accumulation cycles was inversely proportional to the speed of updating the demodulation data. In actual use, compromises have to be made according to the operating conditions.
The variance and standard deviation of the data for the three numbers of accumulation periods are shown in
Table 1.
It can be seen from
Table 1 that as the number of accumulation periods increased, the range of the distribution of the output amplitude gradually decreased, which is consistent with the conclusion drawn in
Section 3.
4.3.2. Repeatability Error, Nonlinearity Linearity Test, and Accuracy Test
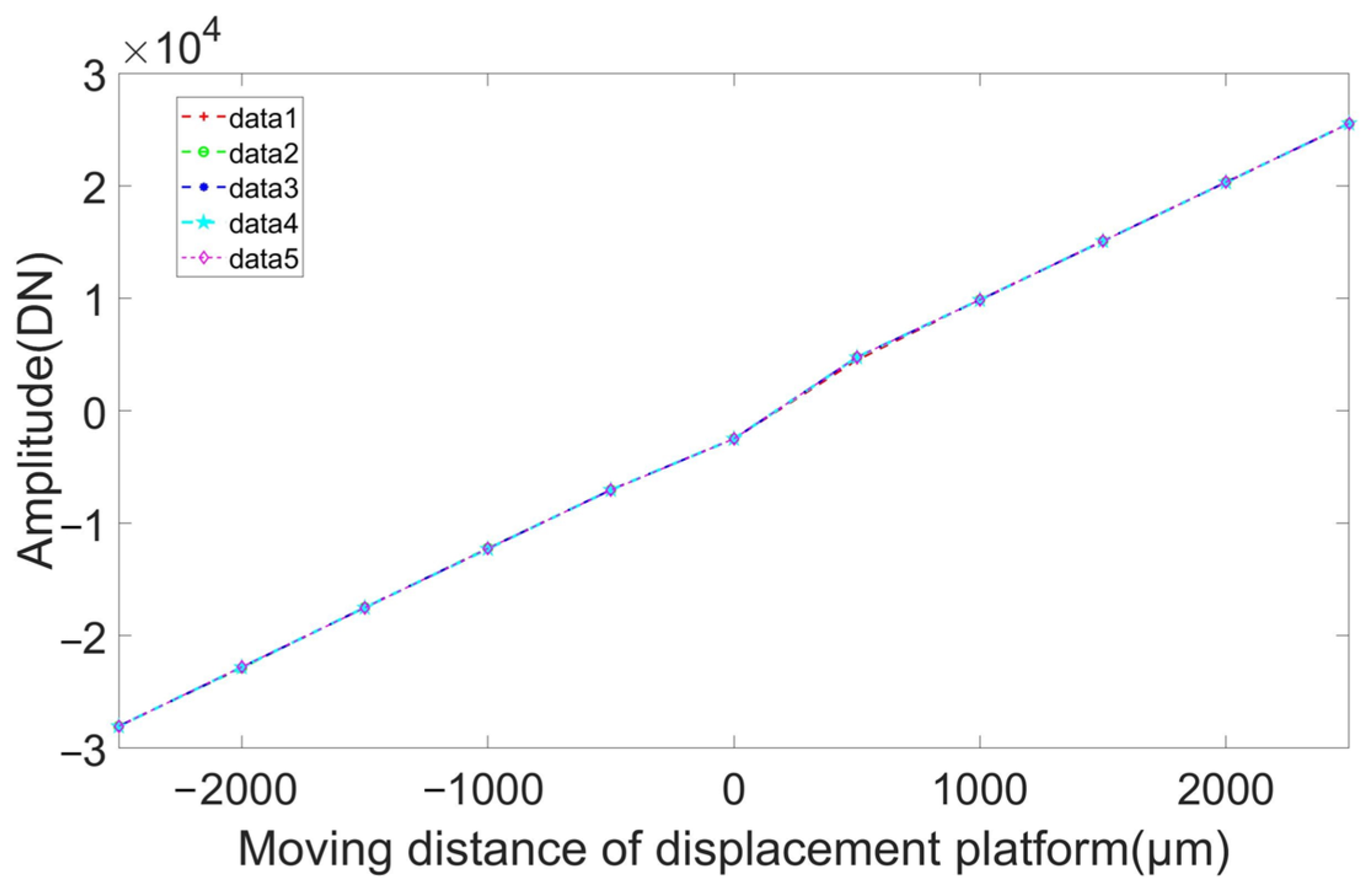
The amplitude of the input analog signal was adjusted to approach the full range of the ADC. The differential micrometer was used to move the target position within a range of ±2.5 mm with a single-step displacement of 500 μm. The laser interferometer was utilized to ensure the positioning accuracy of each single-step movement, and the output signal was collected at each point. The repeatability error of the sensor is a measure of the consistency of its output characteristics with multiple movements in the same direction and range. The maximum repeatability error’s expression is [
20]
Figure 11 displays that the repeatability error is ±0.62%.
We used the data with the largest error for nonlinearity calculations, which was calculated as [
21]
Figure 11 shows that the nonlinearity of the system was 0.68% and that the correlation coefficient between the variables was 0.9999.
The sensor measurement error was calculated using Equation (28).
where
is the measured value,
is the theoretical value caused by platform displacement, and
is the number of times the measurement was changed.
indicates the size of the measurement error between the real value and the measured value. A lower value of
indicates greater measurement accuracy. Using the test data, we obtained
= 99.7.
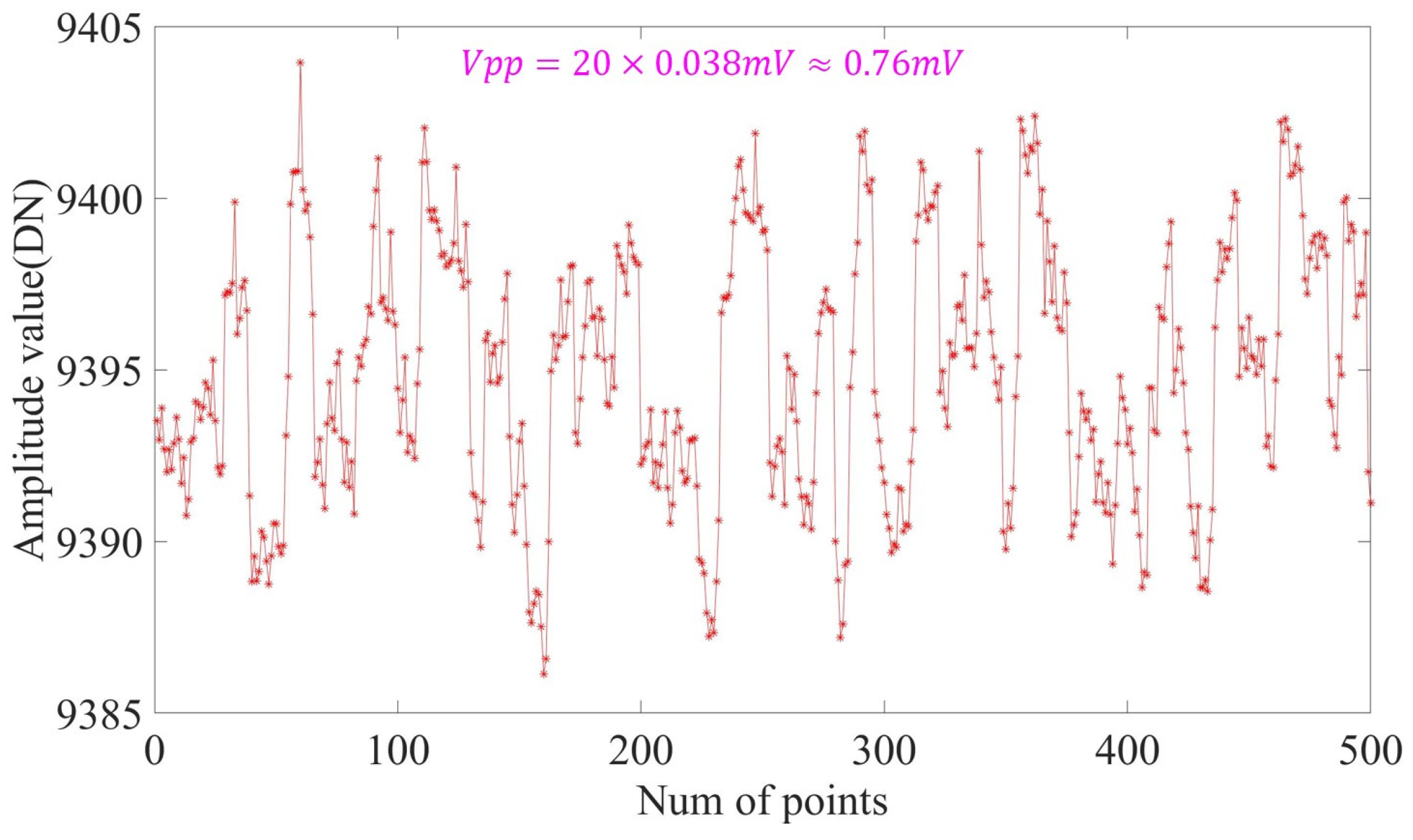
4.4. Resolution and Sensitivity
When the measured target was kept fixed, 500 points were intercepted from the stable output signal of the system to determine the sensor’s resolution. The measurement accuracy of the sensor was calculated using Equation (29); sensitivity was the data resolution error [
22]. The range of the high-speed ADC was 2.5 V, and we calculated the sensitivity of the sensor with a range of 2.5 mm as an example.
Using a data oscillation amplitude of ±10 DN at static stability, and from
Figure 12, we calculated the measurement resolution of the detector using [
23]
4.5. Temperature Stability
The digital demodulation board, differential probe, and probe-fixing device were integrated into the temperature experiment box, as shown in
Figure 13.
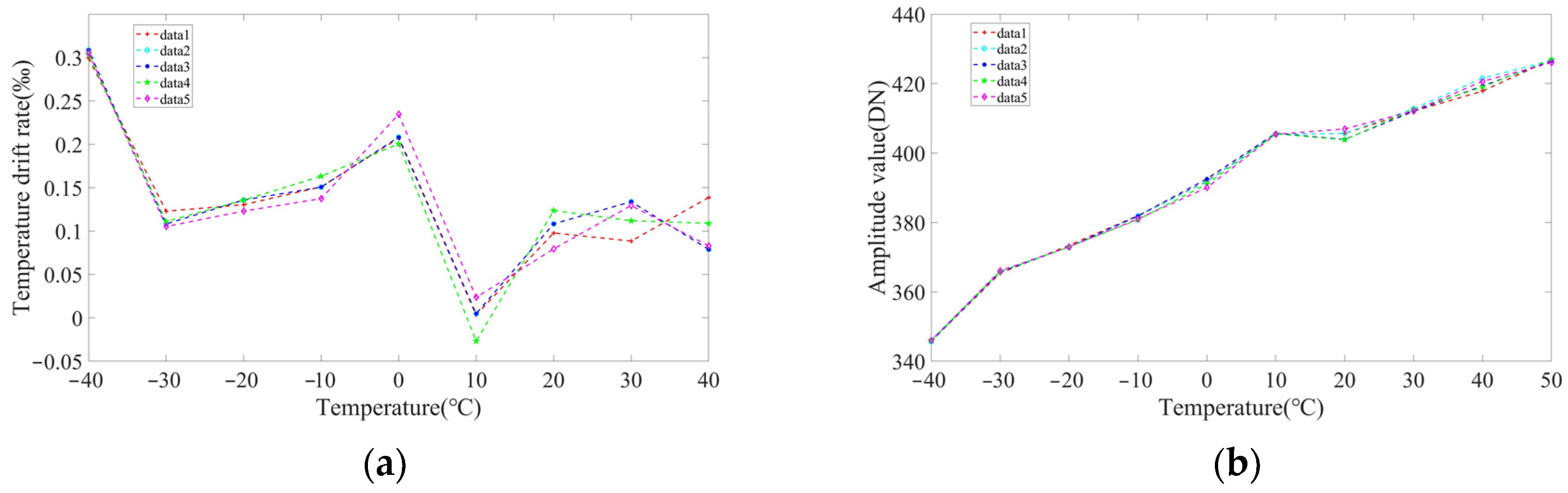
The differential sensor probe was adjusted and put into the temperature experiment box together with the circuit board. System output was recorded every 10 °C from −40 °C to +50 °C, and the temperature was maintained for one hour at each test point. The experiment was repeated five times, as shown in
Figure 14.
We used the data with the largest error for calculations, and the sensor temperature drift was calculated as
It can be seen from
Figure 14 that as the temperature changed from −40 °C to +50 °C, sensor output at the same measurement position changed by 81 DN and the output change rate due to temperature drift was 0.12%, and the temperature drift was ±0.00137% FS/°C. This was a significant improvement in temperature drift performance by the sensor. For every 10 °C change in temperature, the temperature drift rate of the output amplitude was 0.029% at the maximum and 0.0004% at the minimum. At room temperature, the rate of change in temperature drift for every 10 °C was <0.01%.
4.6. Summary
After the above test, the sensor’s main performance is listed in
Table 2.
5. Conclusions
In this study, we designed and tested a low-temperature-drift differential-digital-demodulation eddy-current sensor. The basic mathematical model of the differential eddy-current sensor was presented, a digital eddy current signal amplitude demodulation algorithm was developed, and sources of error in the algorithm were analyzed and eliminated. An eddy current sensor test platform using a laser autocollimator was built to test various sensor parameters. The test results show that nonlinearity was 0.68% and the measurement resolution of the detector was 760 nm. The sensor was tested at various temperature points, and the temperature drift curve of the sensor was plotted. From −40 °C to +50 °C, the system temperature drift rate was ±0.00137% FS/°C, and the temperature drift change rate per 10 °C was <0.01%.



 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}