

A Framework for Cybersecurity Requirements Management in the Automotive Domain


Abstract
:1. Introduction
- An accurate and fast threat analysis and security requirements system called CRMS, suitable for complex large-scale automotive systems, is proposed;
- A secure communication framework for the automotive domain, named the component channel messaging and interface (CCMI) framework, which can serve as a middleware for converting formal and informal representation methods, has been proposed;
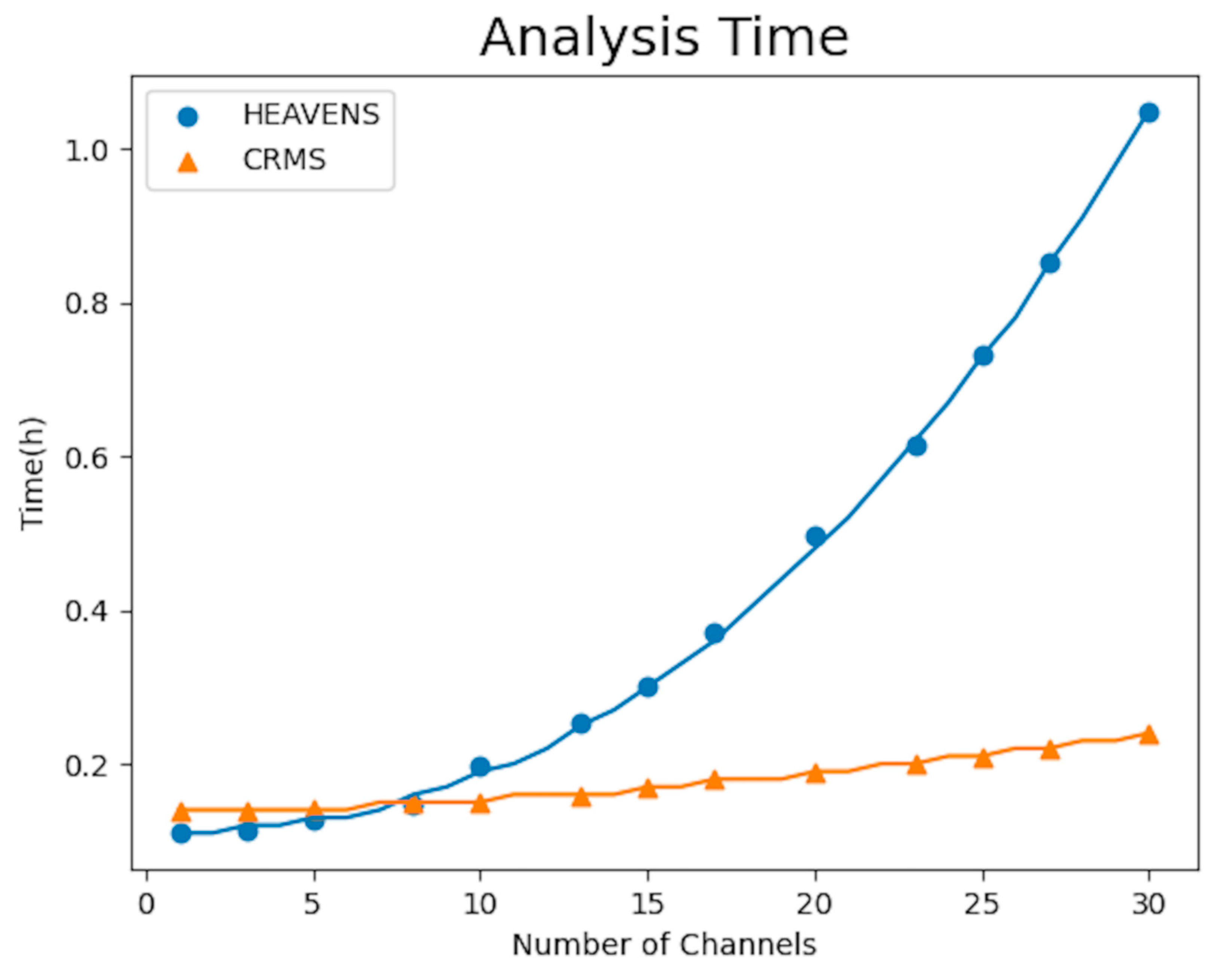
- The proposed approach is applied to an autonomous emergency braking (AEB) system. Its risk detection rate, coverage rates of security requirements, and analysis time were evaluated and compared with the HEAVENS method.
2. Related Work
3. Preliminaries of Proposed Approach
3.1. First-Order Logic
- Precision: First-order logic is a precise mathematical language that can describe complex problems and various relationships clearly and accurately;
- Completeness: First-order logic is a complete language that can describe any countable thing or relationship;
- Natural expression: First-order logic has a natural expression form that can express and understand complex problems and relationships in a human-readable form;
- Computability: First-order logic has computability and can perform automatic reasoning and proof through computers;
- Scalability: First-order logic has high scalability and can handle new problems and domains by adding new symbols and rules;
- Wide application: First-order logic is widely used in formal language, formal proof, and formal methods, especially in computer science, artificial intelligence, and human-computer interaction.
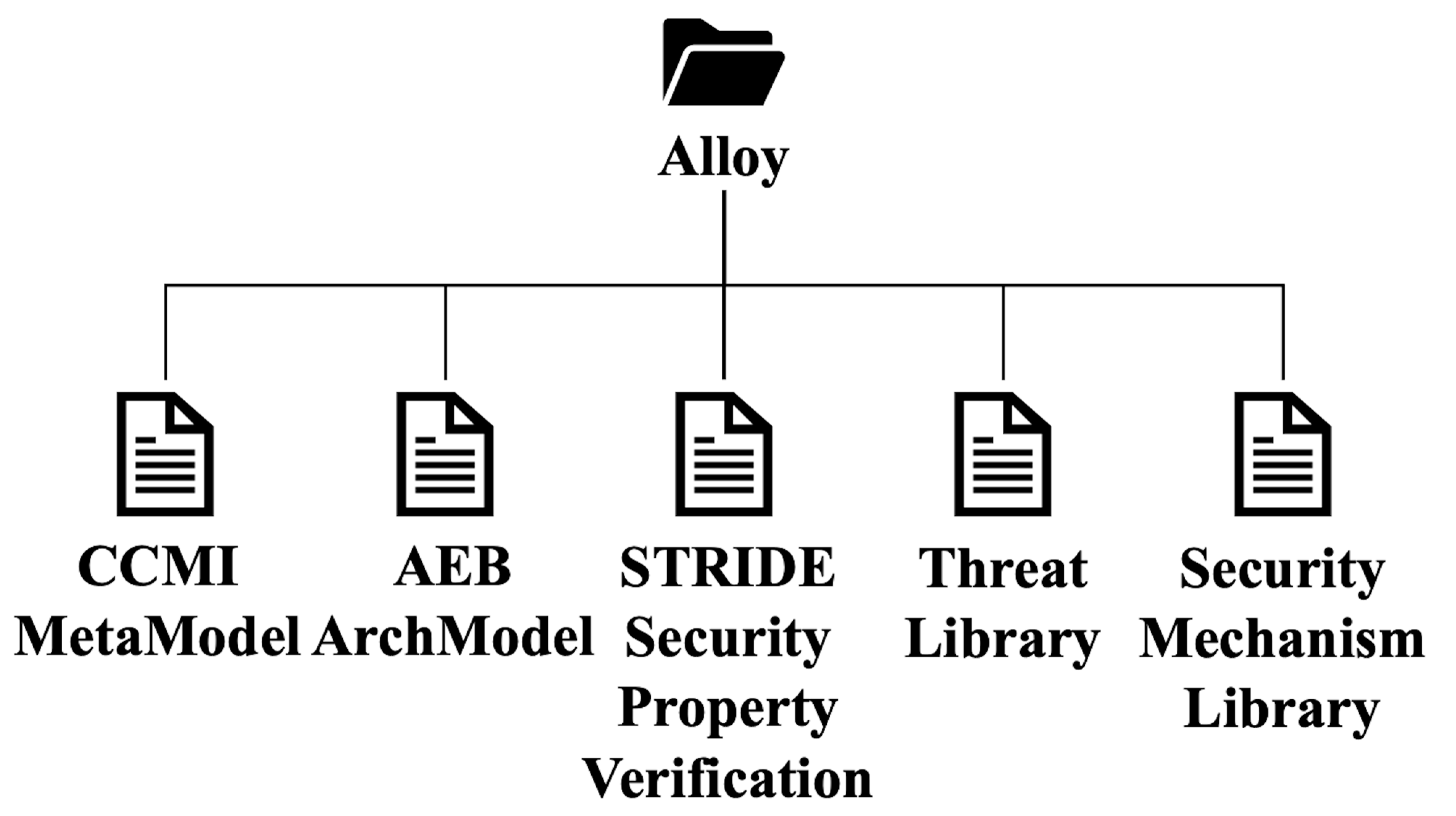
3.2. Alloy
4. Proposed Approach
4.1. Cybersecurity Requirements Management System (CRMS)
4.2. CCMI Secure Communication Framework
- denotes Component, which is a finite set of modules, where each element represents a module in the system;
- denotes Channel, which is a finite set of communication channels, where each element represents a communication channel that messages pass through to be transmitted between different modules;
- denotes Messaging, which is an abstract concept of message passing, describing the dynamic process of messages and their security properties such as sender and receiver modules, communication channels used, message payloads, and message freshness;
- denotes a finite set of interfaces, where all messages in the system must communicate between different modules’ interfaces.
- denotes the set of all interfaces connected to ;
- denotes the set of all communication channels connected to , through which messages are transmitted between different modules;
- denotes the set of all data stored in this module, including normal data, sensitive data, and personal data;
- denotes the set of all security devices deployed in this module, such as HSM;
- denotes the set of all security mechanisms deployed in this module;
- denotes the set of all security attributes of this module.
- denotes a set of types for the given , including Ethernet, CAN FD, LVDS, etc.
- denotes a set of communication protocols used for message exchange over the given . The protocols are organized into 5 layers based on the TCP/IP model: application layer, transport layer, network layer, data link layer, and physical layer. The TCP/IP model is a widely used communication protocol layer model in intelligent connected vehicles. For example, the SOMEIP protocol is an application-layer protocol. By fully including the 5-layer protocols of TCP/IP, we can perform a fine-grained security attribute analysis of the entire vehicle network and thus conduct a comprehensive security assessment of the entire vehicle;
- denotes a set of all security attributes of the communication channel;
- denotes a set of all messages transmitted over the communication channel.
- denotes the predetermined sending module of the message;
- denotes the actual sending module of the message;
- denotes the predetermined set of receiving modules for the message;
- denotes the actual set of receiving modules for the message;
- denotes the set of communication channels that carry the message;
- denotes the expected data payload of the message when sent by the sending module;
- denotes the actual data payload of the message when received by the receiving module;
- denotes the actual time when the message is sent;
- denotes the actual time when the message is received;
- denotes the freshness value of the message;
- denotes the expected set of permissions for the message by the sending module;
- denotes the actual set of permissions for the message by the sending module;
- denotes the expected set of permissions for the message by the receiving module;
- denotes the actual set of permissions for the message by the receiving module.
- is the port number of the interface, which can be set to a default value if the connected protocol does not define the concept of port numbers;
- is the message transmission direction of the interface, including input, output, and duplex.
4.3. STRIDE Threat Model Specification
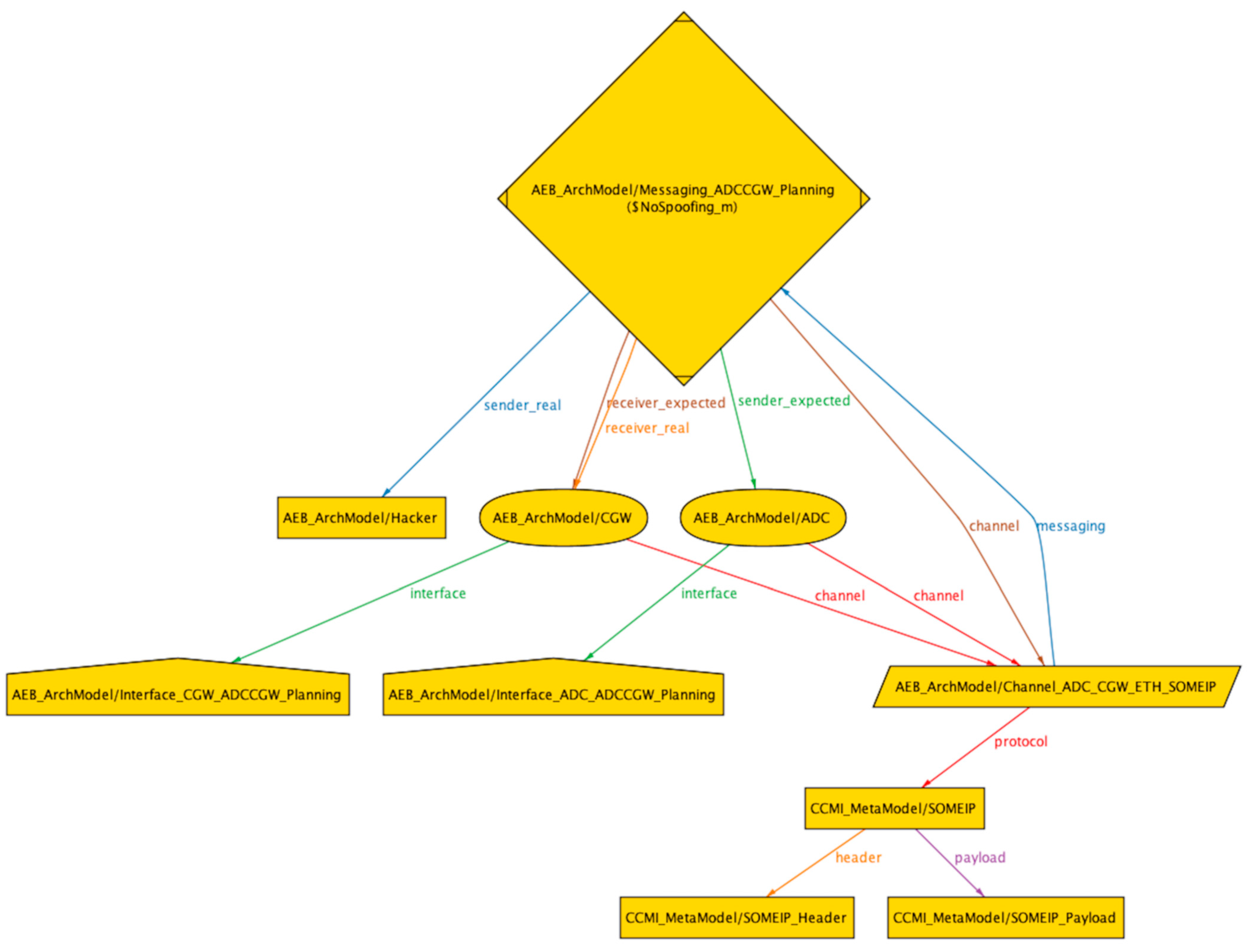
4.3.1. Spoofing
4.3.2. Tampering
4.3.3. Repudiation
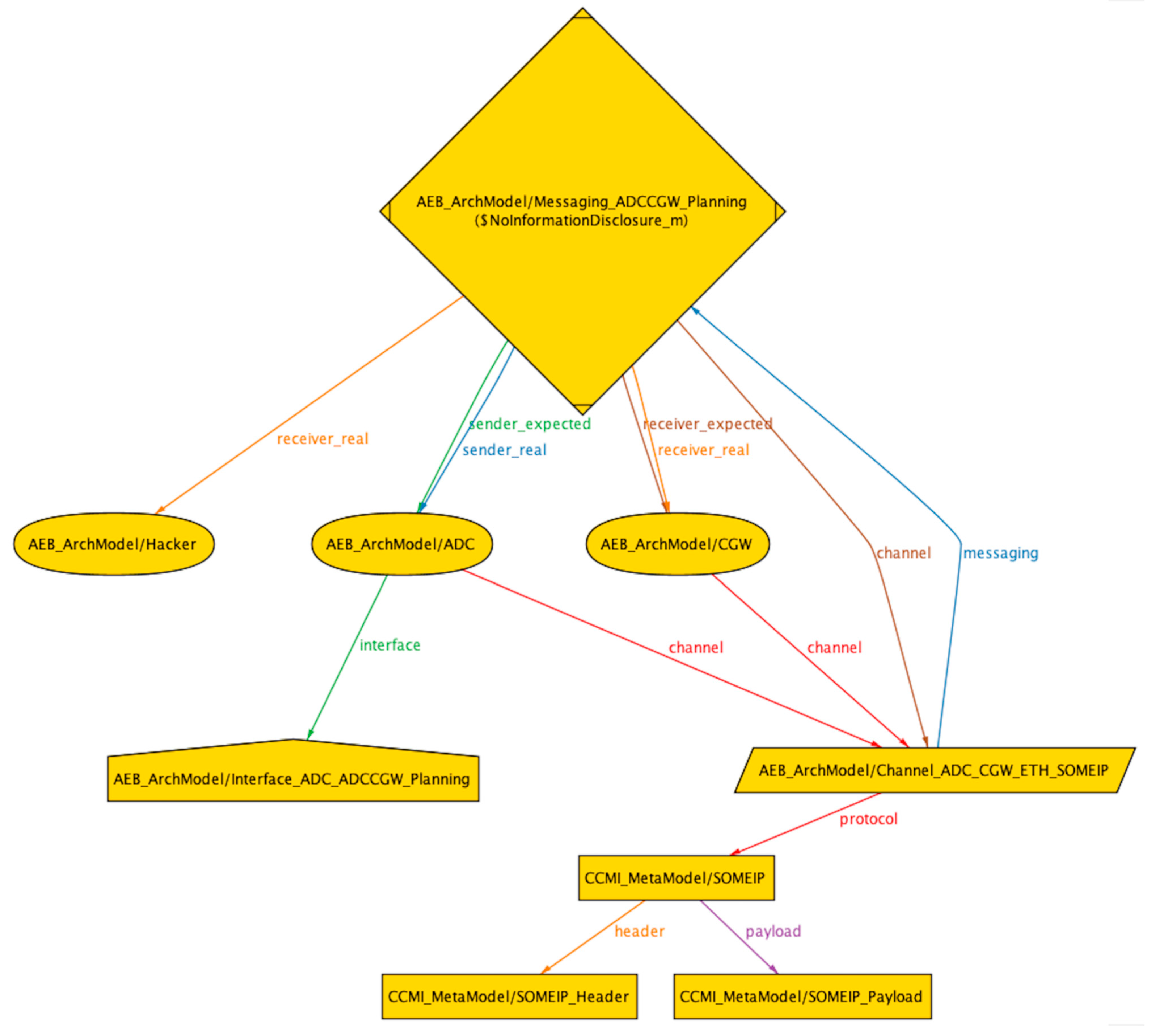
4.3.4. Information Disclosure
4.3.5. Denial of Service
4.3.6. Elevation of Privilege
5. Illustration
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Macher, G.; Armengaud, E.; Brenner, E.; Kreiner, C. A review of threat analysis and risk assessment methods in the automotive context. In Computer Safety, Reliability, and Security, Proceedings of the 35th International Conference, SAFECOMP 2016, Trondheim, Norway, 21–23 September 2016; Proceedings 35; Skavhaug, A., Guiochet, J., Bitsch, F., Eds.; Springer: Cham, Switzerland, 2019; pp. 130–141. [Google Scholar]
- Ebert, C.; Jones, C. Embedded software: Facts, figures, and future. Computer 2009, 42, 42–52. [Google Scholar] [CrossRef]
- Xiong, W.; Gülsever, M.; Kaya, K.M.; Lagerström, R. A study of security vulnerabilities and software weaknesses in vehicles. In Secure IT Systems, Proceedings of the 24th Nordic Conference, NordSec 2019, Aalborg, Denmark, 18–20 November 2019; Proceedings 24; Askarov, A., Hansen, R., Rafnsson, W., Eds.; Springer: Cham, Switzerland, 2019; pp. 204–218. [Google Scholar]
- Filipovikj, P.; Jagerfield, T.; Nyberg, M.; Rodriguez-Navas, G.; Seceleanu, C. Integrating pattern-based formal requirements specification in an industrial tool-chain. In Proceedings of the 2016 IEEE 40th Annual Computer Software and Applications Conference (COMPSAC), Atlanta, GA, USA, 10–14 June 2016; pp. 167–173. [Google Scholar]
- Tucci-Piergiovanni, S.; Chen, D.; Mraidha, C.; Lönn, H.; Mahmud, N.; Reiser, M.-O.; Kolagari, R.T.; Yakymets, N.; Librino, R.; Torchiaro, S. Model-Based Analysis and Engineering of Automotive Architectures with EAST-ADL. In Handbook of Research on Embedded Systems Design; IGI Global: Hershey, PA, USA, 2014; pp. 242–282. [Google Scholar]
- Jan, M.; Jouvray, C.; Kordon, F.; Kung, A.; Lalande, J.; Loiret, F.; Navas, J.; Pautet, L.; Pulou, J.; Radermacher, A. Flex-eWare: A flexible model driven solution for designing and implementing embedded distributed systems. Softw. Pract. Exp. 2012, 42, 1467–1494. [Google Scholar] [CrossRef]
- Luo, F.; Jiang, Y.; Zhang, Z.; Ren, Y.; Hou, S. Threat analysis and risk assessment for connected vehicles: A survey. Secur. Commun. Netw. 2021, 2021, 1263820. [Google Scholar] [CrossRef]
- Henniger, O.; Ruddle, A.; Seudié, H.; Weyl, B.; Wolf, M.; Wollinger, T. Securing vehicular on-board it systems: The evita project. In Proceedings of the VDI/VW Automotive Security Conference, Ingolstadt, Germany, 19 October 2009; p. 41. [Google Scholar]
- Lautenbach, A.; Almgren, M.; Olovsson, T. Proposing HEAVENS 2.0–an automotive risk assessment model. In Proceedings of the 5th ACM Computer Science in Cars Symposium, Ingolstadt, Germany, 30 November 2021; pp. 1–12. [Google Scholar]
- Skavhaug, A.; Guiochet, J.; Schoitsch, E.; Bitsch, F. (Eds.) Computer Safety, Reliability, and Security; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Dürrwang, J.; Beckers, K.; Kriesten, R. A lightweight threat analysis approach intertwining safety and security for the automotive domain. In Computer Safety, Reliability, and Security, Proceedings of the 36th International Conference, SAFECOMP 2017, Trento, Italy, 13–15 September 2017; Proceedings 36; Tonetta, S., Schoitsch, E., Bitsch, F., Eds.; Springer: Cham, Switzerland, 2017; pp. 305–319. [Google Scholar]
- Haidar, F.; Kaiser, A.; Lonc, B.; Urien, P. Risk Analysis on C-ITS pseudonymity aspects. In Proceedings of the 2019 10th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Canary Islands, Spain, 24–26 June 2019; pp. 1–5. [Google Scholar]
- Macher, G.; Sporer, H.; Berlach, R.; Armengaud, E.; Kreiner, C. SAHARA: A security-aware hazard and risk analysis method. In Proceedings of the 2015 Design, Automation & Test in Europe Conference & Exhibition (DATE), Grenoble, France, 9–13 March 2015; pp. 621–624. [Google Scholar]
- Schmittner, C.; Ma, Z.; Smith, P. FMVEA for safety and security analysis of intelligent and cooperative vehicles. In Computer Safety, Reliability, and Security, Proceedings of the SAFECOMP 2014 Workshops: ASCoMS, DECSoS, DEVVARTS, ISSE, ReSA4CI, SASSUR, Florence, Italy, 8–9 September 2014; Proceedings 33; Bondavalli, A., Ceccarelli, A., Ortmeier, F., Eds.; Springer: Cham, Switzerland, 2014; pp. 282–288. [Google Scholar]
- Schmittner, C.; Ma, Z.; Schoitsch, E.; Gruber, T. A case study of fmvea and chassis as safety and security co-analysis method for automotive cyber-physical systems. In Proceedings of the 1st ACM Workshop on Cyber-Physical System Security, Singapore, 14 April–14 March 2015; pp. 69–80. [Google Scholar]
- Verma, S.; Gruber, T.; Schmittner, C.; Puschner, P. Combined approach for safety and security. In Computer Safety, Reliability, and Security, Proceedings of the SAFECOMP 2019 Workshops, ASSURE, DECSoS, SASSUR, STRIVE, and WAISE, Turku, Finland, 10 September 2019; Proceedings 38; Troubitsyna, E., Gashi, I., Schoitsch, E., Bitsch, F., Eds.; Springer: Cham, Switzerland, 2019; pp. 87–101. [Google Scholar]
- Monteuuis, J.-P.; Boudguiga, A.; Zhang, J.; Labiod, H.; Servel, A.; Urien, P. Sara: Security automotive risk analysis method. In Proceedings of the 4th ACM Workshop on Cyber-Physical System Security, Incheon, Republic of Korea, 4 June 2018; pp. 3–14. [Google Scholar]
- Zoppelt, M.; Tavakoli Kolagari, R. SAM: A security abstraction model for automotive software systems. In Security and Safety Interplay of Intelligent Software Systems, Proceedings of the ESORICS 2018 International Workshops, ISSA 2018 and CSITS 2018, Barcelona, Spain, 6–7 September 2018; Revised Selected Papers; Hamid, B., Gallina, B., Shabtai, A., Elovici, Y., Garcia-Alfaro, J., Eds.; Springer: Cham, Switzerland, 2019; pp. 59–74. [Google Scholar]
- Halabi, T.; Wahab, O.A.; Al Mallah, R.; Zulkernine, M. Protecting the Internet of vehicles against advanced persistent threats: A bayesian Stackelberg game. IEEE Trans. Reliab. 2021, 70, 970–985. [Google Scholar] [CrossRef]
- Rouland, Q.; Hamid, B.; Jaskolka, J. Specification, detection, and treatment of STRIDE threats for software components: Modeling, formal methods, and tool support. J. Syst. Archit. 2021, 117, 102073. [Google Scholar] [CrossRef]
- Kim, S.; Shrestha, R.; Kim, S.; Shrestha, R. Internet of vehicles, vehicular social networks, and cybersecurity. In Automotive Cyber Security: Introduction, Challenges, and Standardization; Springer: Singapore, 2020; pp. 149–181. [Google Scholar]
- Zhong, J.; Du, S.; Zhou, L.; Zhu, H.; Cheng, F.; Chen, C.; Xue, Q. Security modeling and analysis on intra vehicular network. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Rinaldo, R.C.; Hutter, D. Integrated analysis of safety and security hazards in automotive systems. In Computer Security, proceedings of the ESORICS 2020 International Workshops, CyberICPS, SECPRE, and ADIoT, Guildford, UK, 14–18 September 2020; Revised Selected Papers 6; Katsikas, S., Cuppens, F., Cuppens, N., Lambrinoudakis, C., Kalloniatis, C., Mylopoulos, J., Antón, A., Gritzalis, S., Meng, W., Furnell, S., et al., Eds.; Springer: Cham, Switzerland, 2020; pp. 3–18. [Google Scholar]
- Mundhenk, P.; Steinhorst, S.; Lukasiewycz, M.; Fahmy, S.A.; Chakraborty, S. Security analysis of automotive architectures using probabilistic model checking. In Proceedings of the 52nd Annual Design Automation Conference, San Francisco, CA, USA, 7–11 June 2015; pp. 1–6. [Google Scholar]
- Luo, F.; Hou, S.; Zhang, X.; Yang, Z.; Pan, W. Security Risk Analysis Approach for Safety-Critical Systems of Connected Vehicles. Electronics 2020, 9, 1242. [Google Scholar] [CrossRef]
- Mohsin, M.; Sardar, M.U.; Hasan, O.; Anwar, Z. IoTRiskAnalyzer: A probabilistic model checking based framework for formal risk analytics of the Internet of Things. IEEE Access 2017, 5, 5494–5505. [Google Scholar] [CrossRef]
- Karray, K.; Danger, J.-L.; Guilley, S.; Abdelaziz Elaabid, M. Attack tree construction and its application to the connected vehicle. In Cyber-Physical Systems Security; Springer: Cham, Switzerland, 2018; pp. 175–190. [Google Scholar]
- Best, B.; Jurjens, J.; Nuseibeh, B. Model-based security engineering of distributed information systems using UMLsec. In Proceedings of the 29th International Conference on Software Engineering (ICSE’07), Minneapolis, MN, USA, 20–26 May 2007; pp. 581–590. [Google Scholar]
- Ouchani, S.; Khaled, A. Security assessment and hardening of autonomous vehicles. In Risks and Security of Internet and Systems, Proceedings of the 15th International Conference, CRiSIS 2020, Paris, France, 4–6 November 2020; Revised Selected Papers 15; Garcia-Alfaro, J., Leneutre, J., Cuppens, N., Yaich, R., Eds.; Springer: Cham, Switzerland, 2021; pp. 365–375. [Google Scholar]
- Shah, S.M.; Anastasakis, K.; Bordbar, B. From UML to Alloy and back again. In Proceedings of the 6th International Workshop on Model-Driven Engineering, Verification and Validation, Denver, CO, USA, 5 October 2009; pp. 1–10. [Google Scholar]
- Krisper, M.; Dobaj, J.; Macher, G.; Schmittner, C. RISKEE: A risk-tree based method for assessing risk in cyber security. In Systems, Software and Services Process Improvement, Proceedings of the 26th European Conference, EuroSPI 2019, Edinburgh, UK, 18–20 September 2019; Proceedings 26; Walker, A., O’Connor, R., Messnarz, R., Eds.; Springer: Cham, Switzerland, 2019; pp. 45–56. [Google Scholar]
- Schmittner, C.; Ma, Z.; Puschner, P. Limitation and improvement of STPA-Sec for safety and security co-analysis. In Computer Safety, Reliability, and Security, Proceedings of the SAFECOMP 2016 Workshops, ASSURE, DECSoS, SASSUR, and TIPS, Trondheim, Norway, 20 September 2016; Proceedings 35; Skavhaug, A., Guiochet, J., Schoitsch, E., Bitsch, F., Eds.; Springer: Cham, Switzerland, 2016; pp. 195–209. [Google Scholar]
- Friedberg, I.; McLaughlin, K.; Smith, P.; Laverty, D.; Sezer, S. STPA-SafeSec: Safety and security analysis for cyber-physical systems. J. Inf. Secur. Appl. 2017, 34, 183–196. [Google Scholar] [CrossRef]
- Ansari, M.T.J.; Pandey, D.; Alenezi, M. STORE: Security threat oriented requirements engineering methodology. J. King Saud Univ. -Comput. Inf. Sci. 2022, 34, 191–203. [Google Scholar] [CrossRef]
- Sönmez, F.Ö.; Kiliç, B.G. Reusable Security Requirements Repository Implementation Based on Application/System Components. IEEE Access 2021, 9, 165966–165988. [Google Scholar] [CrossRef]
- Mouratidis, H.; Shei, S.; Delaney, A. A security requirements modelling language for cloud computing environments. Softw. Syst. Model. 2020, 19, 271–295. [Google Scholar] [CrossRef]
- Bouskela, D.; Falcone, A.; Garro, A.; Jardin, A.; Otter, M.; Thuy, N.; Tundis, A. Formal requirements modeling for cyber-physical systems engineering: An integrated solution based on FORM-L and Modelica. Requir. Eng. 2022, 27, 1–30. [Google Scholar] [CrossRef]
- Kumar, M.S.; Harika, A.; Sushama, C.; Neelima, P. Automated Extraction of Non-Functional Requirements From Text Files: A Supervised Learning Approach. In Handbook of Intelligent Computing and Optimization for Sustainable Development; Scrivener Publishing LLC: Beverly, MA, USA, 2022; pp. 149–170. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Methods | Advantages/Disadvantages |
|---|---|---|
| Formula-based | EVITA | No complete evaluation process. |
| HEAVENS | HEAVENS provides a detailed process. | |
| SHIELD | SHIELD enables the evaluation of multiple system configurations and the selection of those that meet established requirements. | |
| SGM | Easy to use. Difficulty in describing complex systems in detail. | |
| TVRA | Quantification. Long analysis time is required. | |
| SAHARA | Safety considered. Long analysis time is required. | |
| FMVEA | Failure modes are analyzed in terms of component quality attributes, while threat modes are used to analyze security attribute failures. | |
| CHASSIS | Too many subjective factors in the analysis method. | |
| ANP | ANP considered the relationship between failures and threats and the impact of propagation, which can help reduce the number of design iterations. | |
| SARA | SARA provides a framework for security experts to participate in the security process. | |
| SAM | SAM combines safety management and model-based system engineering through an abstract description of the principles of automotive security modeling. High learning costs. | |
| Bayesian Stackelberg Game | Can reduce the impact of advanced persistent threats. High learning costs. | |
| Model-based | STRIDE | Be able to identify and analyze the threats in the system. Need to expand and adapt to the automotive field. |
| PASTA | PASTA utilizes data flow diagrams at the application decomposition layer. | |
| GTS | High learning costs. | |
| UMLsec | Unable to perform detailed representations for complex, large systems. | |
| UML2Alloy | Need to expand and adapt to the automotive field. | |
| Attack Tree Analysis | Long analysis time is required. | |
| RISKEE | Long analysis time is required. | |
| STPA-Sec | Did not consider the network and system architecture. | |
| STPA-SafeSec | Did not consider the network and system architecture. |
| Rules | EMF Elements | Alloy Elements |
|---|---|---|
| Rule 1 | EObject | Sig |
| Rule 2 | EClass | Sig |
| Rule 3 | EList | Set |
| Rule 4 | EStructuralFeature | Sig |
| Rule 5 | Void | Fun |
| Category | Assets | Description |
|---|---|---|
| Core Component | CGW | Central Gateway |
| Core Component | ADC | ADAS Domain Controller |
| Core Component | IVI | In-Vehicle Infotainment |
| Core Component | TBox | Telematics-Box |
| Domain Controller | ZF | Zone Front |
| Domain Controller | ZR | Zone Rear |
| Sensor | Camera | Camera |
| Sensor | Lidar | Lidar |
| Sensor | Radar | Radar |
| ECU | EM | Electric Motor |
| ECU | BCM | Brake Control Module |
| ECU | EPS | Electric Power Steering |
| Offcar | TSP | Telematics Service Provider |
| Assets | Communication Objects | Channel Type |
|---|---|---|
| Channel_ADC_CGW_ETH_SOMEIP | ADC-CGW | Ethernet |
| Channel_CGW_IVI_ETH_SOMEIP | CGW-IVI | Ethernet |
| Channel_CGW_TBox_ETH_SOMEIP | CGW-TBox | Ethernet |
| Channel_CGW_ZF_ETH_SOMEIP | CGW-ZF | Ethernet |
| Channel_CGW_ZR_ETH_SOMEIP | CGW-ZR | Ethernet |
| Channel_TBox_TSP_ETH_MQTT | TBox-TSP | Ethernet |
| Channel_Camera_ADC_LVDS | Camera-ADC | LVDS |
| Channel_Lidar_ADC_ETH_SOMEIP | Lidar-ADC | Ethernet |
| Channel_Radar_ADC_CANFD | Radar-ADC | CAN FD |
| Channel_ZF_EPS_CANFD | ZF-EPS | CAN FD |
| Channel_ZR_EM_CANFD | ZR-EM | CAN FD |
| Channel_ZR_BCM_CANFD | ZR-BCM | CAN FD |
| Assets | Channel Type | Channel |
|---|---|---|
| Messaging_ADCCGW_Planning | Ethernet | Channel_ADC_CGW_ETH_SOMEIP |
| Messaging_CGWIVI_Display | Ethernet | Channel_CGW_IVI_ETH_SOMEIP |
| Messaging_CGWTBox_Externalcomm | Ethernet | Channel_CGW_TBox_ETH_SOMEIP |
| Messaging_CGWZF_Control | Ethernet | Channel_CGW_ZF_ETH_SOMEI |
| Messaging_CGWZR_Control | Ethernet | Channel_CGW_ZR_ETH_SOMEIP |
| Messaging_TBoxTSP_Externalcomm | Ethernet | Channel_TBox_TSP_ETH_MQTT |
| Messaging_CameraADC_Perception | LVDS | Channel_Camera_ADC_LVDS |
| Messaging_LidarADC_Perception | Ethernet | Channel_Lidar_ADC_ETH_SOMEIP |
| Messaging_RadarADC_Perception | CAN FD | Channel_Radar_ADC_CANFD |
| Messaging_ZFEPS_Control | CAN FD | Channel_ZF_EPS_CANFD |
| Messaging_ZREM_Control | CAN FD | Channel_ZR_EM_CANFD |
| Messaging_ZRBCM_Control | CAN FD | Channel_ZR_BCM_CANFD |
| Assets | Component | Direction |
|---|---|---|
| Interface_ADC_ADCCGW_Planning | ADC | Output |
| Interface_CGW_ADCCGW_Planning | CGW | Input |
| Interface_CGW_CGWIVI_Display | CGW | Output |
| Interface_IVI_CGWIVI_Display | IVI | Input |
| Interface_CGW_CGWTBox_Externalcomm | CGW | Output |
| Interface_TBox_CGWTBox_Externalcomm | TBox | Input |
| Interface_TBox_TBoxTSP_Externalcomm | TBox | Output |
| Interface_TSP_TBoxTSP_Externalcomm | TSP | Input |
| Interface_CGW_CGWZF_Control | CGW | Output |
| Interface_ZF_CGWZF_Control | ZF | Input |
| Interface_CGW_CGWZR_Control | CGW | Output |
| Interface_ZR_CGWZR_Control | ZR | Input |
| Interface_Camera_CameraADC_Perception | Camera | Output |
| Interface_ADC_CameraADC_Perception | ADC | Input |
| Interface_Lidar_LidarADC_Perception | Lidar | Output |
| Interface_ADC_LidarADC_Perception | ADC | Input |
| Interface_Radar_RadarADC_Perception | Radar | Output |
| Interface_ADC_RadarADC_Perception | ADC | Input |
| Interface_ZF_ZFEPS_Control | ZF | Output |
| Interface_EPS_ZFEPS_Control | EPS | Input |
| Interface_ZR_ZREM_Control | ZR | Output |
| Interface_EM_ZREM_Control | EM | Input |
| Interface_ZR_ZRBCM_Control | ZR | Output |
| Interface_BCM_ZRBCM_Control | BCM | Input |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, F.; Jiang, Y.; Wang, J.; Li, Z.; Zhang, X. A Framework for Cybersecurity Requirements Management in the Automotive Domain. Sensors 2023, 23, 4979. https://doi.org/10.3390/s23104979
Luo F, Jiang Y, Wang J, Li Z, Zhang X. A Framework for Cybersecurity Requirements Management in the Automotive Domain. Sensors. 2023; 23(10):4979. https://doi.org/10.3390/s23104979
Chicago/Turabian StyleLuo, Feng, Yifan Jiang, Jiajia Wang, Zhihao Li, and Xiaoxian Zhang. 2023. "A Framework for Cybersecurity Requirements Management in the Automotive Domain" Sensors 23, no. 10: 4979. https://doi.org/10.3390/s23104979
APA StyleLuo, F., Jiang, Y., Wang, J., Li, Z., & Zhang, X. (2023). A Framework for Cybersecurity Requirements Management in the Automotive Domain. Sensors, 23(10), 4979. https://doi.org/10.3390/s23104979