
WARNING: A Wearable Inertial-Based Sensor Integrated with a Support Vector Machine Algorithm for the Identification of Faults during Race Walking




Abstract
:1. Introduction
2. Materials and Methods
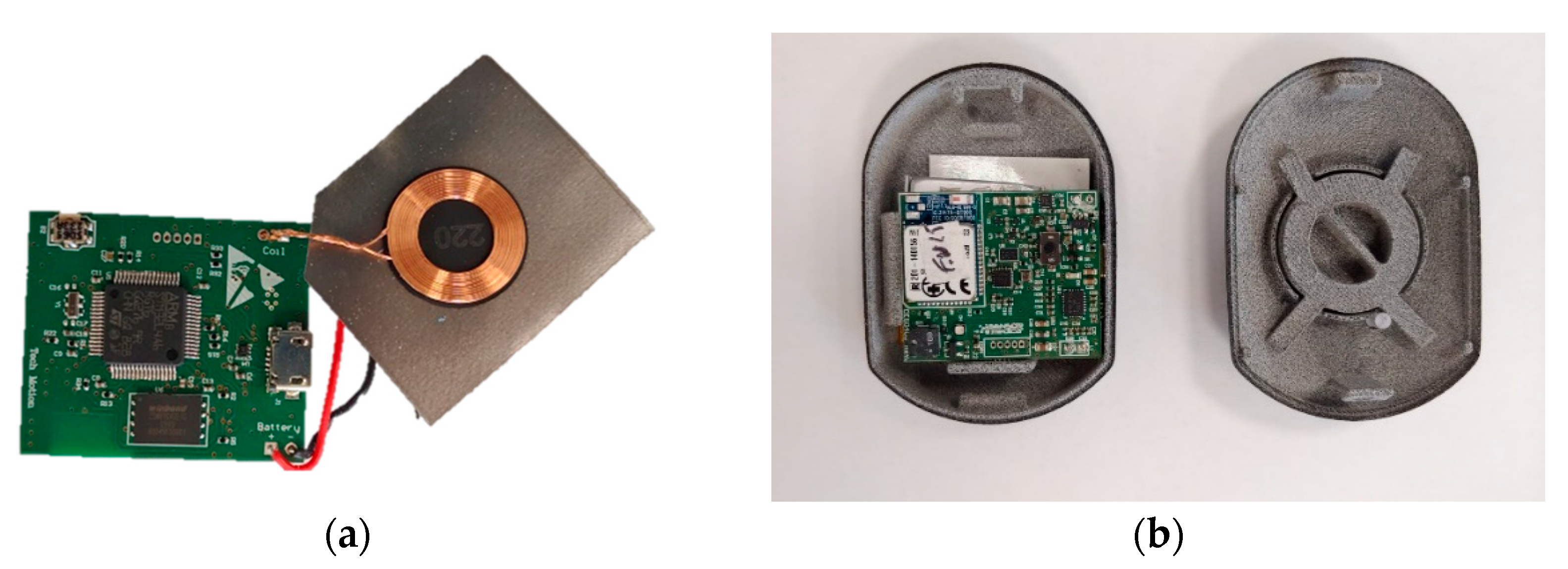
2.1. WARNING—Hardware and Software Components
- an inertial sensor (Invensense ICM 20948) able to acquire 3D linear acceleration, 3D angular velocity and 3D magnetic field with a sample rate up to 1 kHz;
- a Bluetooth module 4.0 LE for receiving and transmitting data to a smart device, such as a tablet or smartphone;
- a processor (Cortex M4).
2.2. Participants and Experimental Procedure
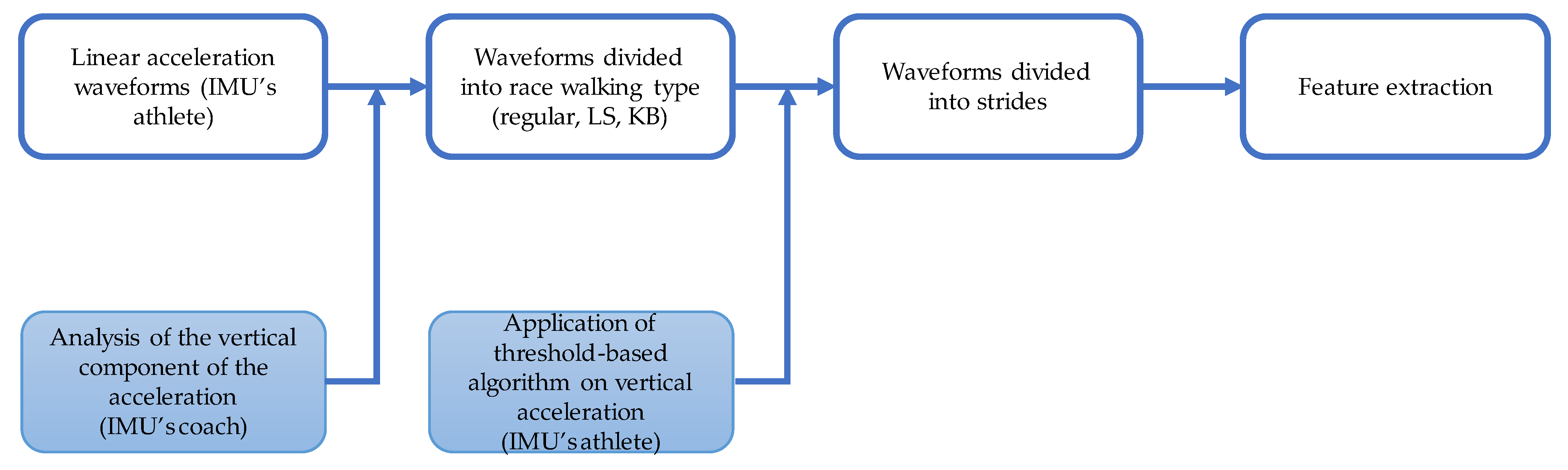
2.3. Data Analysis
2.3.1. Selection of the Best-Performing Algorithm
Decision Tree
Support Vector Machines
K-Nearest Neighbors
2.3.2. Effects of the Number of Sensors
3. Results and Discussions
3.1. Best-Performing Classifier
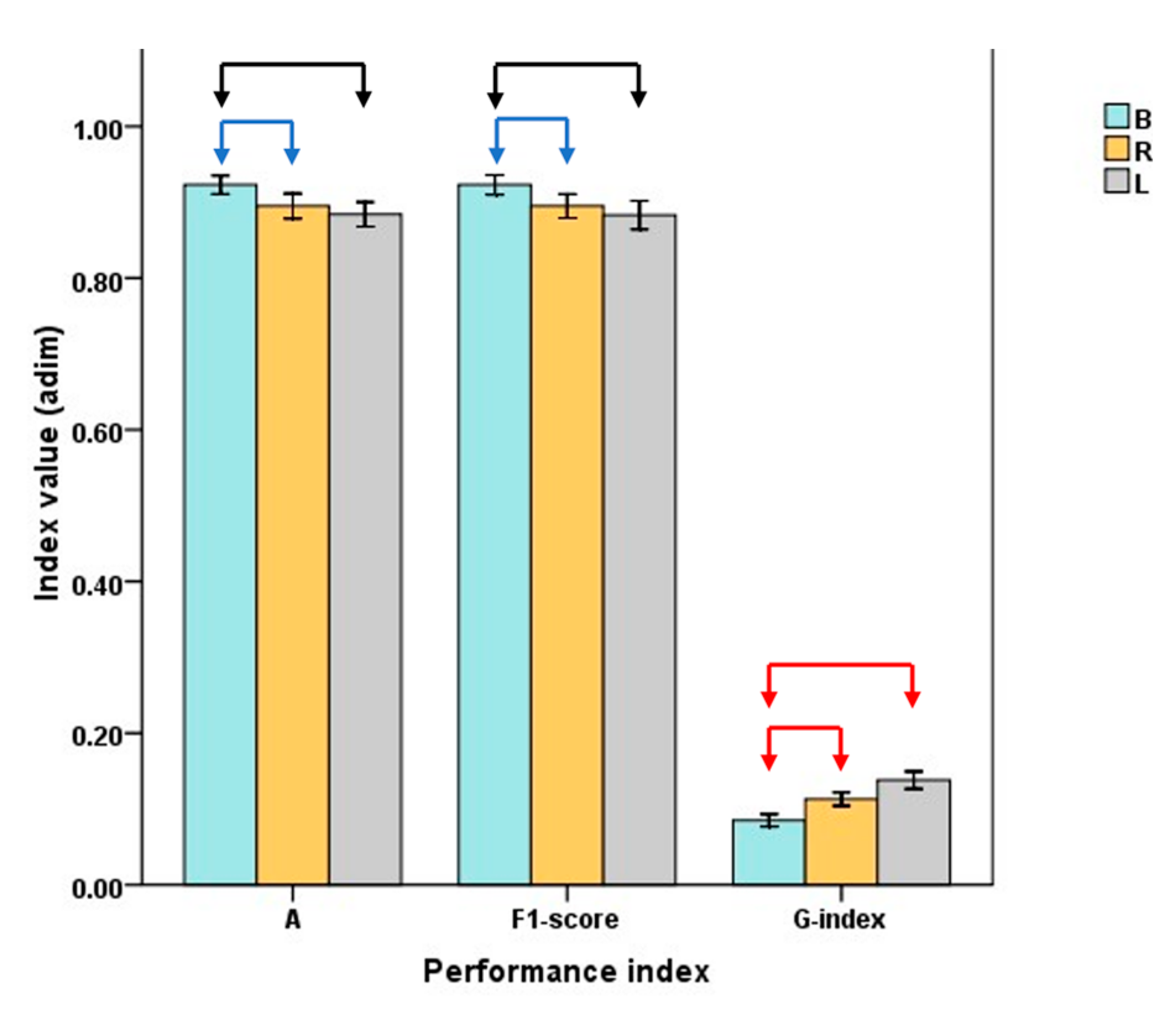
3.2. Effect of Sensor Number
4. WARNING Applications and Limits
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Davenport, T.; Kalakota, R. The Potential for Artificial Intelligence in Healthcare. Future Healthc. J. 2019, 6, 94–98. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Zhang, J. Analysis of Application of Tennis Electronic Referee Based on Artificial Intelligence in Tennis Matches. J. Phys. Conf. Ser. 2021, 1852, 022028. [Google Scholar] [CrossRef]
- Taborri, J.; Palermo, E.; Rossi, S. Automatic Detection of Faults in Race Walking: A Comparative Analysis of Machine-Learning Algorithms Fed with Inertial Sensor Data. Sensors 2019, 19, 1461. [Google Scholar] [CrossRef] [PubMed]
- Chen, X. Research on the Application of Artificial Intelligence Technology in the Field of Sports Refereeing. J. Phys. Conf. Ser. 2021, 1952, 042048. [Google Scholar] [CrossRef]
- Avugos, S.; MacMahon, C.; Bar-Eli, M.; Raab, M. Inter-Individual Differences in Sport Refereeing: A Review of Theory and Practice. Psychol. Sport Exerc. 2021, 55, 101926. [Google Scholar] [CrossRef]
- Pavei, G.; Cazzola, D.; La Torre, A.; Minetti, A.E. The Biomechanics of Race Walking: Literature Overview and New Insights. Eur. J. Sport Sci. 2014, 14, 661–670. [Google Scholar] [CrossRef] [PubMed]
- Hanley, B.; Bissas, A. Analysis of Lower Limb Internal Kinetics and Electromyography in Elite Race Walking. J. Sport. Sci. 2013, 31, 1222–1232. [Google Scholar] [CrossRef]
- Simons, D.J.; Chabris, C.F.; Schnur, T.; Levin, D.T. Evidence for Preserved Representations in Change Blindness. Conscious. Cogn. 2002, 11, 78–97. [Google Scholar] [CrossRef]
- Knicker, A.; Loch, M. Race Walking Technique and Judging—The Final Report of the International Athletic Foundation Research Project. N. Stud. Athl. 1990, 5, 25–38. [Google Scholar]
- Barettin, D.; Pecchia, A.; Auf der Maur, M.; Di Carlo, A.; Lassen, B.; Willatzen, M. Electromechanical Field Effects in InAs/GaAs Quantum Dots Based on Continuum K*p and Atomistic Tight-Binding Methods. Comput. Mater. Sci. 2021, 197, 110678. [Google Scholar] [CrossRef]
- Lee, J.B.; Mellifont, R.B.; Burkett, B.J.; James, D.A. Detection of Illegal Race Walking: A Tool to Assist Coaching and Judging. Sensors 2013, 13, 16065–16074. [Google Scholar] [CrossRef] [PubMed]
- Santoso, D.R.; Setyanto, T.A. Development of Precession Instrumentation System for Differentiate Walking from Running in Race Walking by Using Piezoelectric Sensor. Sens. Transducers J. 2013, 155, 120–127. [Google Scholar]
- Di Gironimo, G.; Caporaso, T.; Del Giudice, D.M.; Tarallo, A.; Lanzotti, A. Development of a New Experimental Protocol for Analysing the Race-Walking Technique Based on Kinematic and Dynamic Parameters. Procedia Eng. 2016, 147, 741–746. [Google Scholar] [CrossRef]
- Di Gironimo, G.; Caporaso, T.; Del Giudice, D.M.; Lanzotti, A. Towards a New Monitoring System to Detect Illegal Steps in Race-Walking. Int. J. Interact. Des. Manuf. 2017, 11, 317–329. [Google Scholar] [CrossRef]
- Campoverde-Garate, J.P.; Chuqui-Calle, J.C.; Serpa-Andrade, L.J.; Bueno-Palomeque, F.L. Detection of Flight Phase in Race Walking Based on Pressure Sensors. In Proceedings of the 2022 IEEE 40th Central America and Panama Convention (CONCAPAN), Panama, FL, USA, 9 November 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Caporaso, T.; Grazioso, S. IART: Inertial Assistant Referee and Trainer for Race Walking. Sensors 2020, 20, 783. [Google Scholar] [CrossRef]
- Ciu, Y. Intelligent Wireless Monitoring System for Foul Play in a Walking Race Based on UWB. In Proceedings of the 2nd ETP/IITA Conference on Telecommunication and Information, Phuket, Thailand, 3–4 April 2011. [Google Scholar]
- Suzuki, T.; Takeda, K.; Fujii, K. Automatic Detection of Faults in Race Walking from a Smartphone Camera: A Comparison of an Olympic Medalist and University Athletes. arXiv 2022, arXiv:2208.12646. [Google Scholar]
- Taborri, J.; Scalona, E.; Rossi, S.; Palermo, E.; Patane, F.; Cappa, P. Real-Time Gait Detection Based on Hidden Markov Model: Is It Possible to Avoid Training Procedure? In Proceedings of the 2015 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Turin, Italy, 7–9 May 2015; pp. 141–145. [Google Scholar]
- Taborri, J.; Scalona, E.; Palermo, E.; Rossi, S.; Cappa, P. Validation of Inter-Subject Training for Hidden Markov Models Applied to Gait Phase Detection in Children with Cerebral Palsy. Sensors 2015, 15, 24514–24529. [Google Scholar] [CrossRef]
- Goršič, M.; Kamnik, R.; Ambrožič, L.; Vitiello, N.; Lefeber, D.; Pasquini, G.; Munih, M. Online Phase Detection Using Wearable Sensors for Walking with a Robotic Prosthesis. Sensors 2014, 14, 2776–2794. [Google Scholar] [CrossRef]
- Mannini, A.; Sabatini, A.M. Gait Phase Detection and Discrimination between Walking–Jogging Activities Using Hidden Markov Models Applied to Foot Motion Data from a Gyroscope. Gait Posture 2012, 36, 657–661. [Google Scholar] [CrossRef]
- Selles, R.W.; Formanoy, M.A.G.; Bussmann, J.B.J.; Janssens, P.J.; Stam, H.J. Automated Estimation of Initial and Terminal Contact Timing Using Accelerometers; Development and Validation in Transtibial Amputees and Controls. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 81–88. [Google Scholar] [CrossRef]
- Sabut, S.; Pandey, O.; Mishra, B.S.P.; Mohanty, M. Detection of Ventricular Arrhythmia Using Hybrid Time–Frequency-Based Features and Deep Neural Network. Phys. Eng. Sci. Med. 2021, 44, 135–145. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.; Olshen, R.; Stone, C. Classification and Regression Trees; Wadsworth: Belmont, CA, USA, 1984. [Google Scholar]
- Taborri, J.; Molinaro, L.; Santospagnuolo, A.; Vetrano, M.; Vulpiani, M.C.; Rossi, S. A Machine-Learning Approach to Measure the Anterior Cruciate Ligament Injury Risk in Female Basketball Players. Sensors 2021, 21, 3141. [Google Scholar] [CrossRef] [PubMed]
- Mannini, A.; Trojaniello, D.; Cereatti, A.; Sabatini, A.M. A Machine Learning Framework for Gait Classification Using Inertial Sensors: Application to Elderly, Post-Stroke and Huntington’s Disease Patients. Sensors 2016, 16, 134. [Google Scholar] [CrossRef] [PubMed]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Hearst, M.A.; Dumais, S.T.; Osuna, E.; Platt, J.; Scholkopf, B. Support Vector Machines. IEEE Intell. Syst. Appl. 1998, 13, 18–28. [Google Scholar] [CrossRef]
- Altman, N.S. An Introduction to Kernel and Nearest-Neighbor Nonparametric Regression. Am. Stat. 1992, 46, 175–185. [Google Scholar]
- Chaka, K.; Le Thanh, N.; Flamary, R.; Belleudy, C. Performance Comparison of the KNN and SVM Classification Algorithms in the Emotion Detection System EMOTICA. Int. J. Sens. Netw. Data Commun. 2018, 7, 1–9. [Google Scholar] [CrossRef]
- Faul, F.; Erdfelder, E.; Lang, A.-G.; Buchner, A. G*Power 3: A Flexible Statistical Power Analysis Program for the Social, Behavioral, and Biomedical Sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef]
- Carvalho, D.V.; Pereira, E.M.; Cardoso, J.S. Machine Learning Interpretability: A Survey on Methods and Metrics. Electronics 2019, 8, 832. [Google Scholar] [CrossRef]
- Mannini, A.; Sabatini, A.M. Machine Learning Methods for Classifying Human Physical Activity from On-Body Accelerometers. Sensors 2010, 10, 1154–1175. [Google Scholar] [CrossRef]
- Dreiseitl, S.; Ohno-Machado, L. Logistic Regression and Artificial Neural Network Classification Models: A Methodology Review. J. Biomed. Inform. 2002, 35, 352–359. [Google Scholar] [CrossRef] [PubMed]
- Ray, S. A Quick Review of Machine Learning Algorithms. In Proceedings of the International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Faridabad, India, 14–16 February 2019; pp. 35–39. [Google Scholar] [CrossRef]
- Hanley, B.; Bissas, A.; Drake, A. Technical Characteristics of Elite Junior Men and Women Race Walkers. J. Sport. Med. Phys. Fit. 2014, 54, 700–707. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Name | Acronyms | Category |
|---|---|---|
| Fine DT | fDT | Decision Tree |
| Medium DT | mDT | Decision Tree |
| Coarse DT | cDT | Decision Tree |
| Linear SVM | lSVM | Support Vector Machine |
| Quadratic SVM | qSVM | Support Vector Machine |
| Cubic SVM | cSVM | Support Vector Machine |
| Fine Gaussian SVM | gSVM | Support Vector Machine |
| Fine KNN | fKNN | K-Nearest Neighbor |
| Medium KNN | mKNN | K-Nearest Neighbor |
| Coarse KNN | cKNN | K-Nearest Neighbor |
| Cosine KNN | coKNN | K-Nearest Neighbor |
| Cubic KNN | cuKNN | K-Nearest Neighbor |
| Weighted KNN | wKNN | K-Nearest Neighbor |
| Name | Parameter Selection |
|---|---|
| fKNN | Number of neighbors set to 1. The metric is the Euclidean distance. |
| mKNN | Number of neighbors set to 10. The metric is the Euclidean distance. |
| cKNN | Number of neighbors set to 100. The metric is the Euclidean distance. |
| coKNN | Number of neighbors set to 10. The metric is the cosine distance. |
| cuKNN | Number of neighbors set to 10. The metric is the cubic distance. |
| wKNN | Number of neighbors set to 10. The metric is a weighted distance (using the inverse method, where the weight is equal to the inverse of the distance). |
| Subsampling B | Subsampling R | Subsampling L | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| A | F1 | G | A | F1 | G | A | F1 | G | PS | |
| fDT | 0.84 (0.03) | 0.84 (0.03) | 0.18 (0.02) | 0.84 (0.03) | 0.84 (0.03) | 0.18 (0.02) | 0.80 (0.04) | 0.79 (0.03) | 0.22 (0.02) | 37,000 |
| mDT | 0.75 (0.05) | 0.75 (0.04) | 0.29 (0.05) | 0.74 (0.02) | 0.74 (0.03) | 0.30 (0.04) | 0.73 (0.02) | 0.73 (0.02) | 0.31 (0.04) | 39,000 |
| cDT | 0.67 (0.09) | 0.66 (0.07) | 0.38 (0.08) | 0.63 (0.07) | 0.63 (0.06) | 0.46 (0.07) | 0.57 (0.10) | 0.56 (0.09) | 0.59 (0.08) | 44,000 |
| lSVM | 0.84 (0.02) | 0.83 (0.02) | 0.19 (0.03) | 0.76 (0.02) | 0.76 (0.04) | 0.27 (0.04) | 0.74 (0.03) | 0.74 (0.03) | 0.29 (0.05) | 32,000 |
| qSVM | 0.92 (0.02) | 0.92 (0.02) | 0.09 (0.01) | 0.90 (0.03) | 0.90 (0.03) | 0.11 (0.02) | 0.88 (0.03) | 0.88 (0.03) | 0.14 (0.02) | 26,000 |
| cSVM | 0.92 (0.04) | 0.92 (0.04) | 0.09 (0.03) | 0.90 (0.04) | 0.90 (0.05) | 0.11 (0.02) | 0.87 (0.04) | 0.87 (0.03) | 0.17 (0.04) | 19,000 |
| gSVM | 0.84 (0.03) | 0.83 (0.03) | 0.22 (0.03) | 0.87 (0.04) | 0.87 (0.04) | 0.17 (0.03) | 0.85 (0.03) | 0.85 (0.04) | 0.19 (0.03) | 230,000 |
| fKNN | 0.91 (0.05) | 0.91 (0.04) | 0.11 (0.02) | 0.90 (0.05) | 0.90 (0.05) | 0.12 (0.02) | 0.87 (0.04) | 0.87 (0.04) | 0.15 (0.03) | 25,000 |
| mKNN | 0.88 (0.03) | 0.88 (0.03) | 0.13 (0.02) | 0.88 (0.04) | 0.88 (0.02) | 0.13 (0.03) | 0.84 (0.04) | 0.84 (0.03) | 0.18 (0.03) | 23,000 |
| cKNN | 0.77 (0.05) | 0.77 (0.04) | 0.26 (0.03) | 0.74 (0.04) | 0.74 (0.05) | 0.30 (0.03) | 0.70 (0.09) | 0.70 (0.08) | 0.33 (0.07) | 18,000 |
| coKNN | 0.90 (0.03) | 0.90 (0.04) | 0.12 (0.02) | 0.88 (0.04) | 0.88 (0.05) | 0.13 (0.04) | 0.85 (0.05) | 0.85 (0.04) | 0.17 (0.03) | 14,000 |
| cuKNN | 0.90 (0.03) | 0.90 (0.03) | 0.11 (0.01) | 0.90 (0.02) | 0.89 (0.03) | 0.11 (0.02) | 0.83 (0.04) | 0.83 (0.04) | 0.20 (0.02) | 19,000 |
| wKNN | 0.90 (0.03) | 0.90 (0.03) | 0.11 (0.02) | 0.90 (0.03) | 0.90 (0.03) | 0.11 (0.02) | 0.85 (0.05) | 0.85 (0.04) | 0.17 (0.03) | 21,000 |
| Subsampling B | Subsampling R | Subsampling L | |||||||
|---|---|---|---|---|---|---|---|---|---|
| A | F1 | G | A | F1 | G | A | F1 | G | |
| Max | 0.95 | 0.94 | 0.11 | 0.92 | 0.93 | 0.12 | 0.90 | 0.91 | 0.16 |
| Min | 0.88 | 0.88 | 0.08 | 0.87 | 0.88 | 0.08 | 0.86 | 0.86 | 0.12 |
| TP | TN | FP | FN | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Regular | LC | KB | Regular | LC | KB | Regular | LC | KB | Regular | LC | KB | |
| B | 448 | 454 | 458 | 933 | 951 | 952 | 51 | 33 | 32 | 44 | 38 | 34 |
| R | 436 | 455 | 441 | 914 | 953 | 941 | 70 | 31 | 43 | 56 | 37 | 51 |
| L | 422 | 431 | 442 | 905 | 946 | 920 | 70 | 61 | 50 | 79 | 38 | 64 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taborri, J.; Palermo, E.; Rossi, S. WARNING: A Wearable Inertial-Based Sensor Integrated with a Support Vector Machine Algorithm for the Identification of Faults during Race Walking. Sensors 2023, 23, 5245. https://doi.org/10.3390/s23115245
Taborri J, Palermo E, Rossi S. WARNING: A Wearable Inertial-Based Sensor Integrated with a Support Vector Machine Algorithm for the Identification of Faults during Race Walking. Sensors. 2023; 23(11):5245. https://doi.org/10.3390/s23115245
Chicago/Turabian StyleTaborri, Juri, Eduardo Palermo, and Stefano Rossi. 2023. "WARNING: A Wearable Inertial-Based Sensor Integrated with a Support Vector Machine Algorithm for the Identification of Faults during Race Walking" Sensors 23, no. 11: 5245. https://doi.org/10.3390/s23115245
APA StyleTaborri, J., Palermo, E., & Rossi, S. (2023). WARNING: A Wearable Inertial-Based Sensor Integrated with a Support Vector Machine Algorithm for the Identification of Faults during Race Walking. Sensors, 23(11), 5245. https://doi.org/10.3390/s23115245