1. Introduction
Gait analysis plays a vital role in various health applications, but the use of optical motion analysis systems for measuring spatio-temporal gait parameters has limitations such as cost, fragility, lack of portability and resource requirements [
1]. Inertial measurement unit (IMU) sensors have emerged as an alternative method for measuring gait parameters, capable of providing both gait and posture measurements by combining IMUs with magnetometers [
2].
Among the populations that could benefit from gait measurement, visually impaired people (VIP) stand out. Although electronic navigation aids have been developed for VIP, many of them rely on complex architectures that pose challenges for environmental sensing [
3,
4]. Smartphone-based inertial sensing, utilizing deep learning methods, requires extensive data for training and may not be tailored specifically to the unique gait patterns of VIP [
5]. Furthermore, a recent review highlighted the lack of inertial sensor systems designed for VIP and the scarcity of literature on IMU-based biomechanical analysis in VIP-oriented applications [
6]. While wearable inertial sensors have gained attention in clinical research for the gait parameters of people with conditions such as stroke, Parkinson’s and multiple sclerosis, there is currently a dearth of studies focusing on VIP biomechanics [
7,
8]. Existing non-wearable systems for VIP gait analysis have limitations, and there are a lack of user-oriented wearable systems designed specifically for this purpose [
1]. Moreover, most spatio-temporal gait parameter analyses for VIP have been developed using motion tracking systems, and the assessment of independent mobility and rehabilitation in orientation and mobility (O&M) typically relies on visual estimates rather than quantitative measurements [
9].
Considering the aforementioned gaps, this research aims to propose a simple architecture based on wearable inertial sensors for quantitatively estimating gait and postural parameters in VIP. By utilizing IMUs and magnetometers, this approach seeks to provide accurate and user-friendly gait assessments tailored to the needs of visually impaired individuals, facilitating their orientation and mobility rehabilitation. The study design includes validation tests with visually impaired volunteers performing various walking tasks, with a focus on assessing gait characteristics and natural posture. By addressing the limitations of current assessment methods and offering a practical solution, this research contributes to the development of assistive technologies for VIP and has the potential to enhance their independent mobility and navigation.
This article presents two IMU-based methods for measuring step length (SL), gait velocity (GV), step count (SC) and total displacement (D), and one method for postural assessment (PA). The methods are novel due to their combination of several factors. First, the methods use absolute orientation angle values (leg rotation) during the gait cycle to calculate SL and GV, rather than relying on accelerometry or angular velocity values. Additionally, they apply a gait biomechanical model instead of an abstraction model or a direct integration model to avoid accumulated drift error when calculating each SL and displacement, and this approach maintains the simplicity of the system setup with low computational processing [
10]. Second, the methods provide precise real-time measurement of spatio-temporal gait parameters despite using only one or two low-cost wearable inertial sensors. This eliminates the need for post-acquisition gait analysis software to calculate parameters and process data in clinical approaches, as seen in [
9]. Third, the methods are designed to be user-oriented and implemented as assistive devices for O&M training, with specific conditions set in the measurement algorithms.
2. Materials and Methods
A measuring system comprising two BNO055 (Bosch Sensortec Reutlingen, Kusterdingen, Germany) 9DOF inertial sensors was previously developed [
9]. The postural assessment was conducted using a MetaMotionR (MBIENTLAB, Inc., San Francisco, CA, USA) IMU.
2.1. Biomechanical Principles
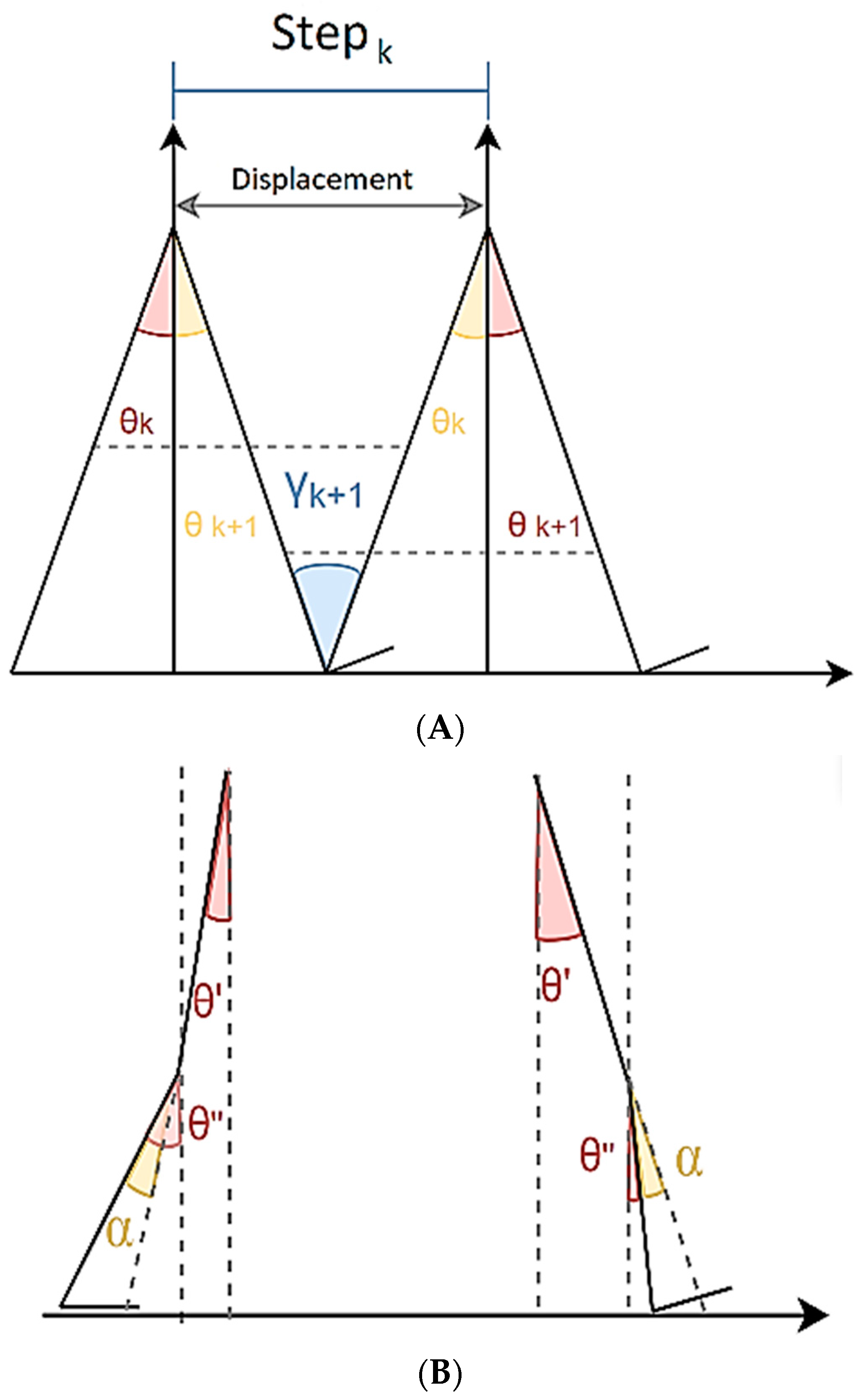
In a gait cycle formed of two consecutive steps, θ (
Figure 1A) refers to the inclination angle with respect to the vertical angle, as measured by the inertial sensor. For its part, γ is the rotation angle between the heel strike and heel off during the stance phase of the gait cycle of both legs. However, as the knee does not remain stiff during the gait, γ is, more accurately, the rotation of the virtual segment connecting the hip with the heel. To determine this segment, the inclination, and the length of both of the main subsegments of the leg (thigh and shank), must be known; this adjusted model was the biomechanical model used for the estimation in both of the methods, and it is shown in
Figure 1B.
In the two-sensor (TWS) configuration, both inclinations were measured using the IMUs. In the one-sensor configuration (named “thigh sensor” TS), the sagittal flexion–extension angles of the knee at heel strike and heel off were extracted from the literature [
11,
12], and the unknown inclination was calculated relying on the fact that α = ∥θ′ − θ″∥, where θ′ is the thigh inclination, θ″ is the shank inclination and α is the flexion–extension angle. The rotations denoted by γ led to the displacement of the center of mass in the
x-axis of the navigation coordinate frames, which matched the direction of the current step (k). Thus, this displacement is a more accurate approximation of the step length.
2.2. Experimental Procedure
This study employed a single-group design with a mixed methods approach. The study was approved by the ethics committee of the Universidad Politécnica de Madrid in October 2020 (ref. ID: 2020000224) and was conducted following the principles of the Declaration of Helsinki. To test both of the methods, nine visually impaired volunteers were recruited via e-mail using the collaboration pool of the National Spanish Blind Association and word of mouth, and the sample selection criteria involved visually impaired people that use either long cane or guide dog assistance. All of the sessions were video recorded, and the volunteers provided their consent after the experimenters read the consent form to them. All of the experiments were conducted at the subjects’ residences. The volunteers were instructed to walk in five different conditions with varying velocities, including four indoor experiments and one outdoor experiment. The total displacement for each subject depended on the dimensions of their residence and included the following conditions: Exp1—walking 7–10 m at a normal velocity from point A to point B, Exp2—walking 7–10 m at a fast velocity from point A to point B, Exp3—walking 7–10 m at a slow velocity with short strides from point A to point B, Exp4—walking 14–20 m at a normal velocity with two stops in a hallway from point A to point B and Exp5—walking 60–100 m outdoors from point A to point B. The data collection comprised a total of 2068 steps analyzed over 1039 m to evaluate the accuracy of the two estimation methods.
2.3. Parameter Measurement
A single SC algorithm was utilized for both the TWS and THS methods. The algorithm was designed to identify a new step when the leg crossed the vertical position, and to detect the local maximum and local minimum in each inflection point of the rotation angle patterns. Additionally, a straightforward activity recognition algorithm, based on angular velocity, was developed to determine whether the user was moving or not, and thus to prevent the detection of “false steps”. More conditions were incorporated, requiring each local maximum to be followed by a local minimum (and vice versa) to count a new step.
Regarding SL, the study used the calculated mean accepted value to obtain the correct mean absolute error, along with the registered SC by the volunteers and the defined total displacement. The value of SL was obtained from the rotation
γ using the following equation, which applies the cosine law:
The length of step k, denoted by SLk, was calculated using the cosine law by considering the lengths of the hip–heel segments for each leg, denoted by hhi.
The distance measure D refers to the summation of the measured step length for every identified step, as illustrated in
Figure 2. This implies that any absolute error in the SL and SC measurements directly influences the D value. The GV for each method was determined by dividing D by the total walking time. The walking time was calculated using the step detection algorithm and compared to the estimated value from the video recordings for computing the mean absolute error, thus ensuring accurate error in GV. The SL and SC measurements can also affect the velocity error.
Postural stability refers to the body’s ability to maintain balance, and it is often evaluated via postural sway. Postural sway involves constant adjustments of the body’s center of gravity on a relatively narrow support base, and personal visual feedback plays a significant role in controlling balance [
13]. In this study, postural assessment (PA) was conducted using orientation angles obtained from a sensor placed on the subjects’ backs to provide input under dynamic conditions. The approach utilized in this study adheres to the principles of posture monitoring, where a single sensor is positioned at the end of the cervical curve and the beginning of the thoracic curve, as demonstrated in [
14]. The 3-angle orientation sensor enables the detection of bending/inclinations, subject tilting to the left and right and postural heading. Although a single method was employed to analyze postural balance, this assessment was performed at a deferred time compared to the other real-time methods that were tested. The standard deviation of the measured roll angle, which indicates the variation in left and right tilting, as well as the standard deviation of the pitch angle, which represents the variation in inclination, were considered in the analysis. In order to confirm that the standard deviations obtained from the orientation angles were capable of detecting significant postural changes that affected heading, inclinations and balance during walking tasks, the researchers conducted a posture evaluation based on the video recordings, as described in [
15].
4. Discussion
This study aimed to use low-cost sensors and to compare two algorithms using data from IMUs placed on the leg and upper back to estimate parameters related to gait and posture that are typically visually assessed by rehabilitators in O&M rehabilitation of visually impaired individuals. The ultimate objective was to select a method that provided the more accurate estimations, which could allow for proximate quantification of the information that was assessed without quantification methods in the current examination methods during O&M.
According to the literature, the proposed methods that use inertial sensors placed on the leg segments concentrate on two approaches for determining gait parameters. One approach involves identifying related variables that correlate with the unknown parameters. Another approach involves direct estimation using biomechanical models or kinematic chains. Frequently, stride length is calculated first by estimating the distance between the feet. The inverted pendulum model, which uses changes in the center of mass height, can also be used. Alternatively, the horizontal acceleration of the feet can be double-integrated to calculate stride length [
16]. The approach proposed in this study aims to utilize leg rotation angles with leg segmentation. While the method has shown reasonable accuracy, a limitation is that the method heavily relies on the correct positioning of the sensor on the leg, and as it is based on the orientation angles of the leg during the walking stages in the gait cycle, a bad positioning of the sensor could jeopardize the accuracy of calculations. Nonetheless, depending on leg rotations, this can also be advantageous in terms of detecting steps taken and rest periods more accurately, which can provide better insight for navigation tools. Some researchers have developed accurate methods of detecting steps using acceleration and rotation values in order to reconstruct paths for indoor navigation using deep learning models such as the uni-directional long short-term memory (LSTM) model [
17]. This method for real-time assessment could be beneficial for the development of a more complex O&M rehabilitation tool.
A large percentage of the visually impaired population is elderly and their gait characteristics may differ from those of non-visually impaired adults. Recent studies have shown that non-visually impaired adults have a mean gait velocity ranging from 1.39 to 1.49 m/s [
9], while blind or visually impaired individuals exhibit a mean gait velocity between 0.86 and 1.11 m/s [
18]. Lower velocity values would likely have bigger standard deviations. Our approach is an acceptable method to measure velocity; however, the error must be reduced if greater accuracy is required in a rehabilitation examination. According to Lim et al. [
19], most of the current literature methods focus primarily on other impairments, such as mobility impairments, or different clinical scenarios; none are yet focused on developing methods to analyze gait velocity in visually impaired populations.
The results of this study suggest that an automated method for the real-time detection of postural changes to assist in making postural assessments could be achieved with the proposed method. However, it is recommended that the study be expanded to include a larger group of participants to determine a threshold value for different gait velocities; this could result in a lower degree of error.
Finally, by utilizing the input data from the system, including SC, SL, GV, D and PA, it is possible to estimate additional spatio-temporal parameters that may be relevant to O&M rehabilitation, such as cadence or stride rate, which measure the number of steps or double stance per minute [
20]. For instance, by applying the same condition used to determine whether a person is walking or not for SC, it is possible to measure the time a user pauses between steps when moving from point A to point B during a displacement task. The results suggest that a balance between general upper body and gait assessment can be achieved with only 2–3 inertial sensors, whereas the current literature may suggest using a greater number of sensors [
21]. The results indicate that both the TWS and THS methods could be employed to develop tools for O&M training. However, the TWS method is more appropriate due to its greater accuracy. A rehabilitated gait that promotes enhanced stability can improve balance, emphasizing the importance of early initiation of orientation and mobility (O&M) training to enhance gait, balance and movement [
1]. The gait patterns of visually impaired individuals differ from those without visual impairment. Therefore, assistive technology development and validation should involve insights from visually impaired individuals. The insufficient involvement of end-users is a limitation of the current literature; development processes must consider targeted users to ensure that usability and accuracy are not compromised [
6]. The dataset created in this research could also be beneficial as an input for deep learning models that train quantitative parameters of walking, as evidenced by a recent review [
18]; there is a need for research into gait in free-living conditions, i.e., at end-user residences.
5. Conclusions
Two different methods were created and tested in five different experimental conditions to assess gait spatio-temporal parameters and to test which method could be more accurate. The results from the TWS configuration were more precise for D, SL, and GV, while the THS configuration produced comparable but slightly less accurate results with greater SD and error, with differences of ±1.42 m absolute error for D, ±2.78 m error for SL, and ±3.37 cm/s error for GV. The addition of a second wearable sensor increases both the computational and hardware cost of TWS, which is the significant architectural difference between the gait estimation methods. Therefore, for measuring the O&M rehabilitation parameters of gait, the TWS method could be more appropriate. However, these results suggest that the THS method, which uses only one sensor, could also be used for other applications in assistive technology when this accuracy range is acceptable. After validating a method for measuring the parameters accurately, the subsequent steps in this research would be to consider developing a feedback system for the user and O&M specialist, as well as the development of a digital platform that considers the end-user’s usability as an assistive technology designed for O&M training. This mixed methods approach aimed to validate the proposed method and architecture for O&M training and assess their potential as assistive technologies for visually impaired individuals.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}