
Transparent Pneumatic Tactile Sensors for Soft Biomedical Robotics

 , , , and
, , , and 
Abstract
:1. Introduction
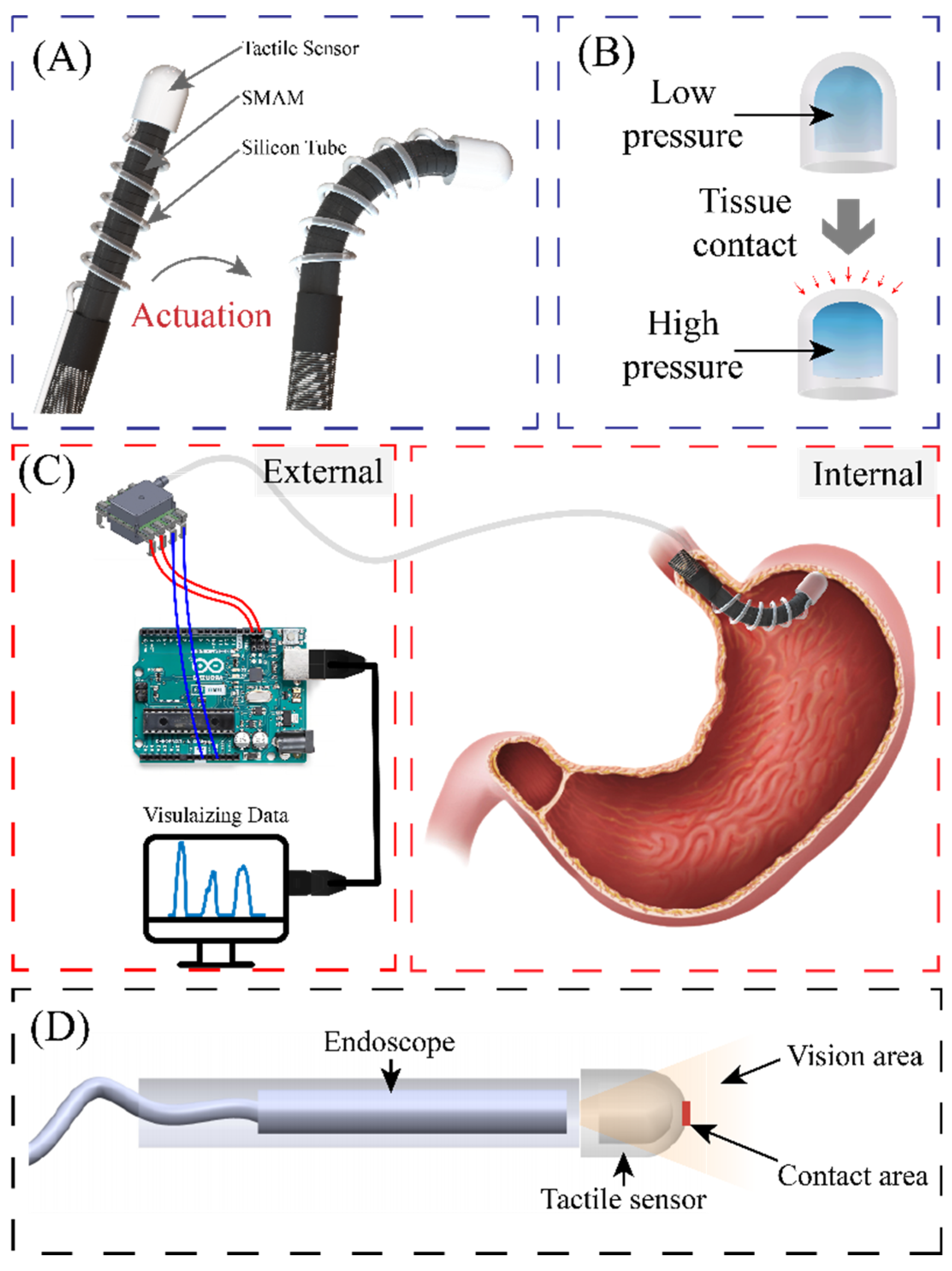
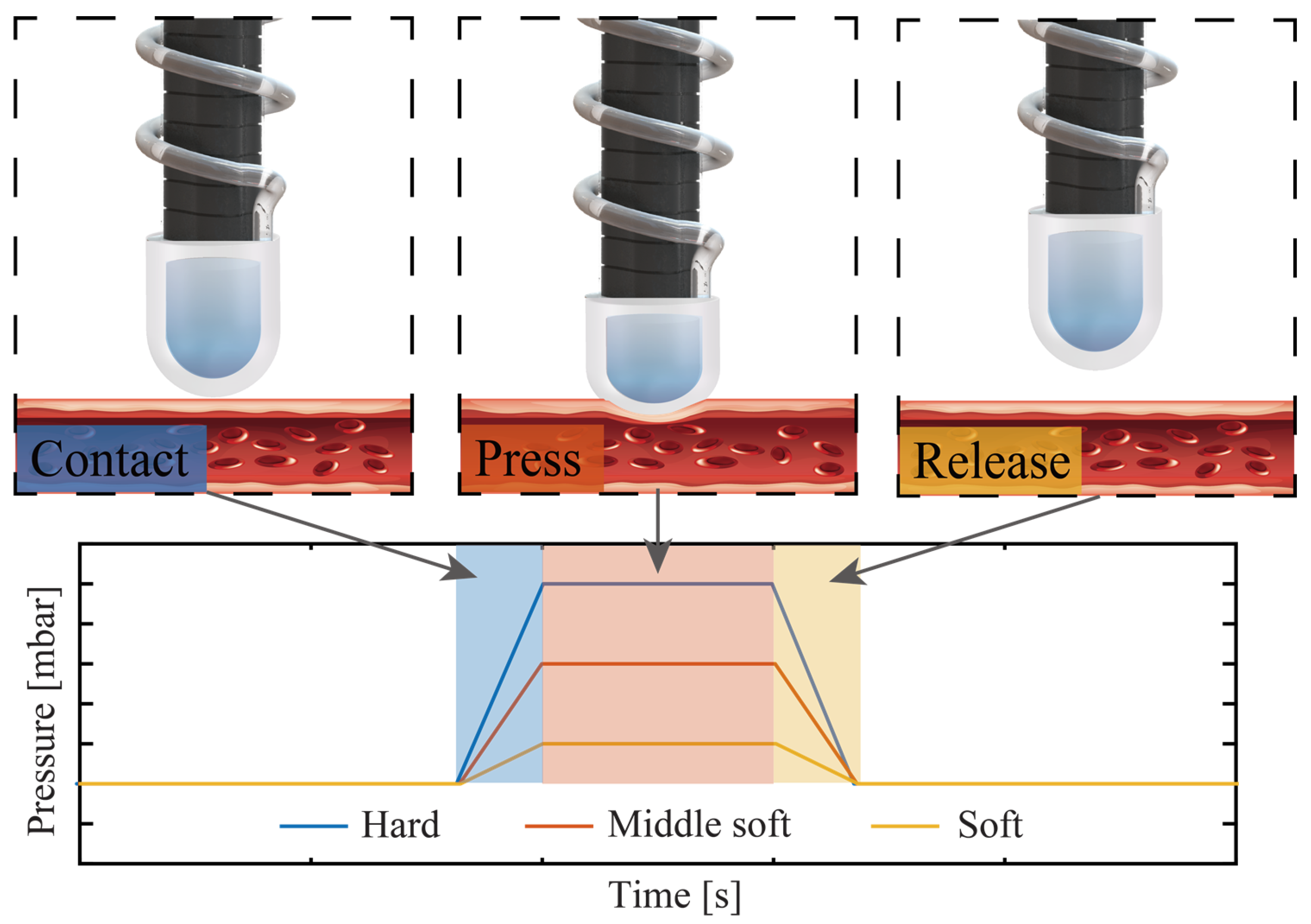
2. Sensor Principle and Design
3. Sensor Development
3.1. Mechanical Part
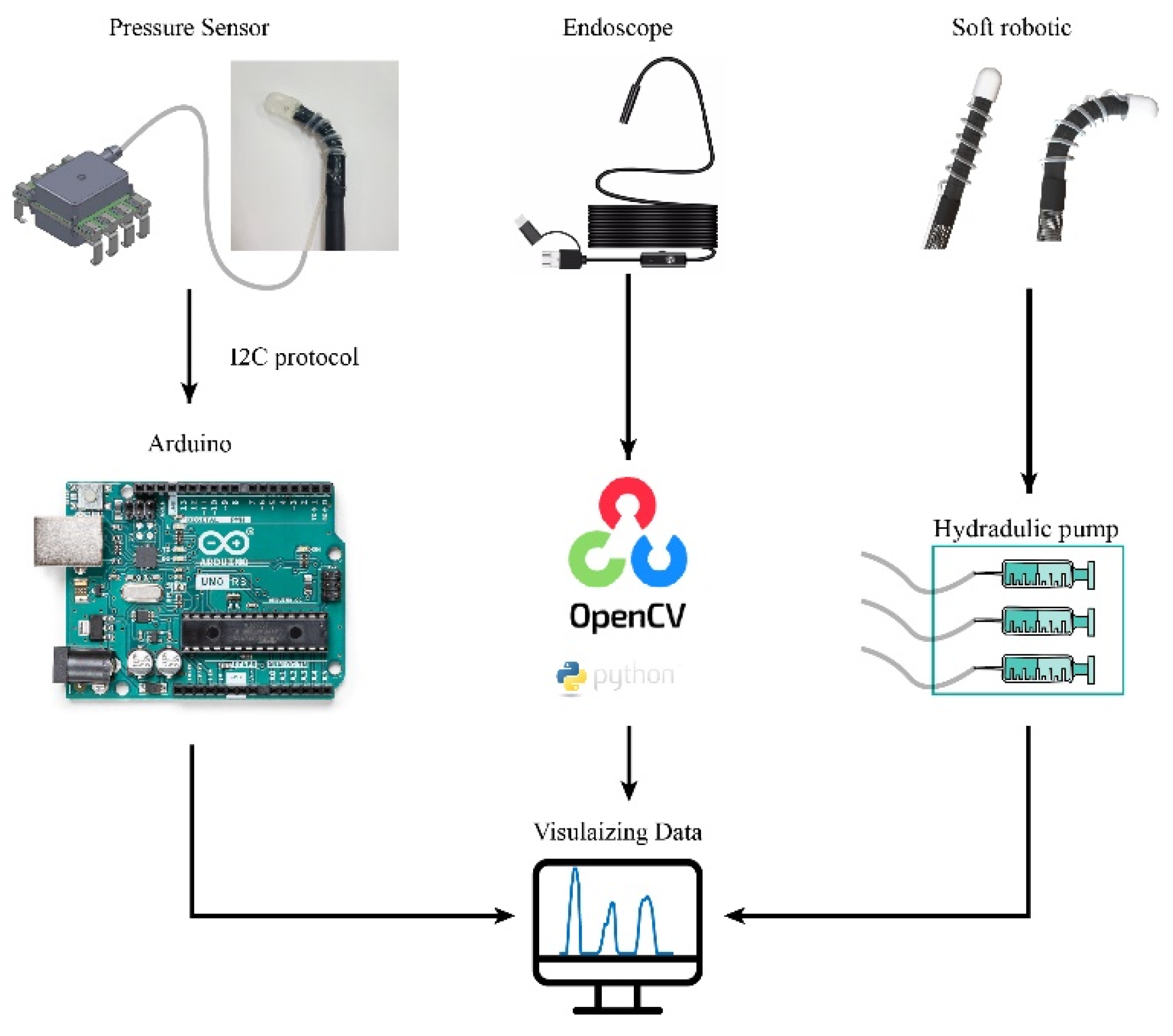
3.2. Readout Circuit
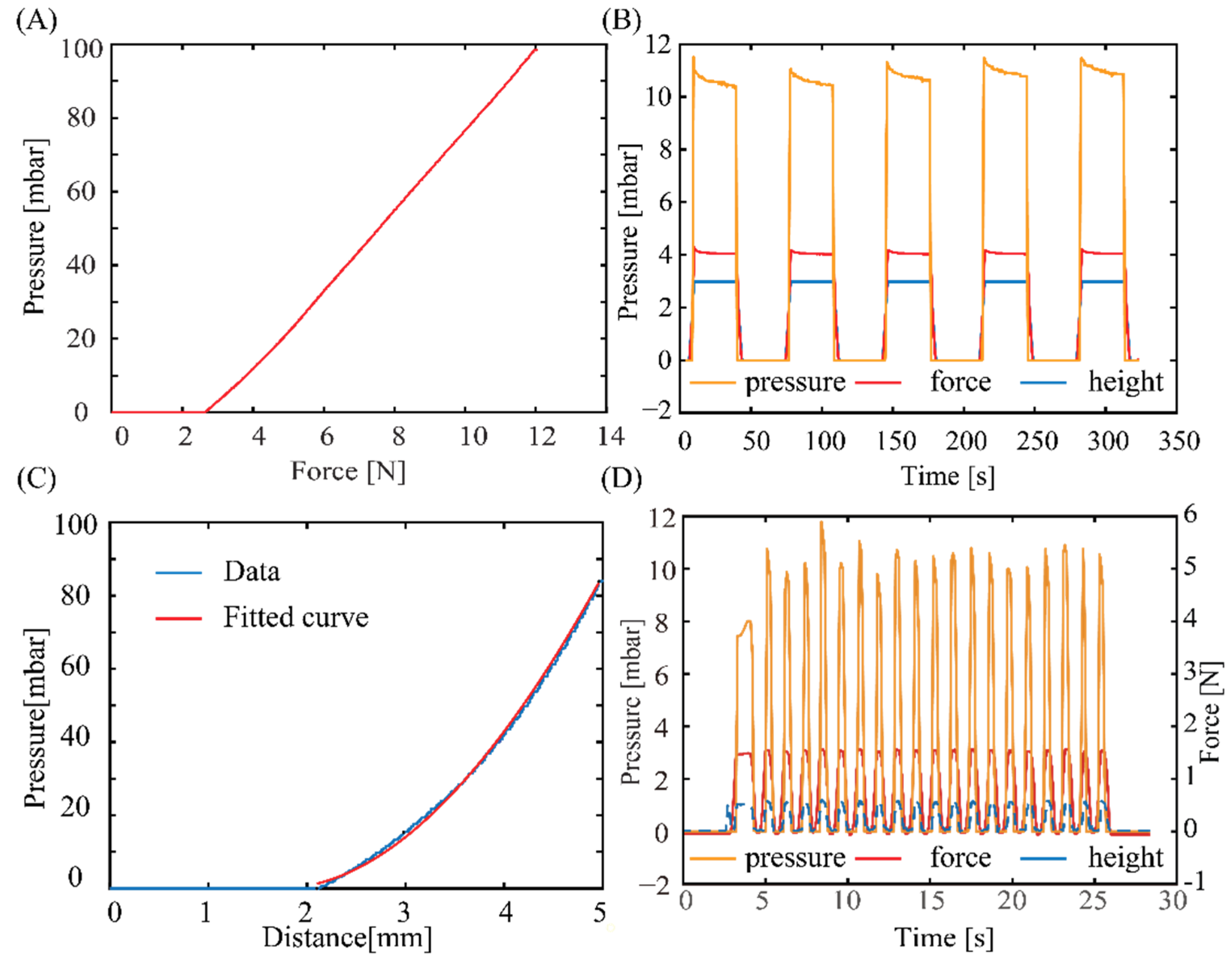
4. Results and Discussion
5. Demonstration of the Tactile Sensor on Surgical, Soft Robot
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Cancer. Available online: https://www.who.int/news-room/fact-sheets/detail/cancer (accessed on 3 May 2023).
- Zanotelli, M.R.; Reinhart-King, C.A. Mechanical Forces in Tumor Angiogenesis. Biomech. Oncol. 2018, 1092, 91–112. [Google Scholar] [CrossRef]
- Byar, D.P.; Mostofi, F.K. The Veterans Administration Cooperative Urological Research Group Carcinoma of the prostate: Prognostic evaluation of certain pathologic features in 208 radical prostatectomies. Cancer 1972, 30, 5–13. [Google Scholar] [CrossRef] [PubMed]
- Barton, M.B.; Harris, R.; Fletcher, S.W. Does This Patient Have Breast Cancer? The Screening Clinical Breast Examination: Should It Be Done? How? Obstet. Gynecol. Surv. 2000, 55, 432–433. [Google Scholar] [CrossRef]
- Waggoner, S.E. Cervical cancer. Lancet 2003, 361, 2217–2225. [Google Scholar] [CrossRef]
- Egorov, V.; van Raalte, H.; Sarvazyan, A.P. Vaginal Tactile Imaging. IEEE Trans. Biomed. Eng. 2010, 57, 1736–1744. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahn, B.; Lorenzo, E.I.S.; Rha, K.H.; Kim, H.J.; Kim, J. Robotic Palpation-Based Mechanical Property Mapping for Diagnosis of Prostate Cancer. J. Endourol. 2011, 25, 851–857. [Google Scholar] [CrossRef] [PubMed]
- Konstantinova, J.; Cotugno, G.; Dasgupta, P.; Althoefer, K.; Nanayakkara, T. Autonomous robotic palpation of soft tissue using the modulation of applied force. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 323–328. [Google Scholar] [CrossRef]
- Ahn, B.; Kim, Y.; Oh, C.K.; Kim, J. Robotic palpation and mechanical property characterization for abnormal tissue localization. Med. Biol. Eng. Comput. 2012, 50, 961–971. [Google Scholar] [CrossRef]
- Beccani, M.; Di Natali, C.; Benjamin, C.E.; Bell, C.S.; Hall, N.E.; Valdastri, P. Wireless tissue palpation: Head characterization to improve tumor detection in soft tissue. Sens. Actuators A Phys. 2015, 223, 180–190. [Google Scholar] [CrossRef] [Green Version]
- Csavina, J.; Field, J.; Félix, O.; Corral-Avitia, A.Y.; Sáez, A.E.; Betterton, E.A. Effect of wind speed and relative humidity on atmospheric dust concentrations in semi-arid climates. Sci. Total Environ. 2014, 487, 82–90. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beccani, M.; Di Natali, C.; Sliker, L.J.; Schoen, J.A.; Rentschler, M.E.; Valdastri, P. Wireless Tissue Palpation for Intraoperative Detection of Lumps in the Soft Tissue. IEEE Trans. Biomed. Eng. 2013, 61, 353–361. [Google Scholar] [CrossRef] [Green Version]
- Trejos, A.L.; Jayender, J.; Perri, M.T.; Naish, M.D.; Patel, R.V.; Malthaner, R.A. Experimental evaluation of robot-assisted tactile sensing for minimally invasive surgery. In Proceedings of the 2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008; pp. 971–976. [Google Scholar] [CrossRef]
- Wanninayake, I.B.; Seneviratne, L.D.; Althoefer, K. Novel indentation depth measuring system for stiffness characterization in soft tissue palpation. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4648–4653. [Google Scholar] [CrossRef]
- McKinley, S.; Garg, A.; Sen, S.; Kapadia, R.; Murali, A.; Nichols, K.; Lim, S.; Patil, S.; Abbeel, P.; Okamura, A.M.; et al. A single-use haptic palpation probe for locating subcutaneous blood vessels in robot-assisted minimally invasive surgery. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 1151–1158. [Google Scholar] [CrossRef]
- Li, M.; Luo, S.; Nanayakkara, T.; Seneviratne, L.D.; Dasgupta, P.; Althoefer, K. Multi-fingered haptic palpation using pneumatic feedback actuators. Sens. Actuators A Phys. 2014, 218, 132–141. [Google Scholar] [CrossRef]
- Scanlan, P.; Hammer, S.; Good, D.; Phipps, S.; Stewart, G.; McNeill, S.; Shu, W.; Reuben, R. Development of a novel actuator for the dynamic palpation of soft tissue for use in the assessment of prostate tissue quality. Sens. Actuators A Phys. 2015, 232, 310–318. [Google Scholar] [CrossRef]
- Herzig, N.; Maiolino, P.; Iida, F.; Nanayakkara, T. A Variable Stiffness Robotic Probe for Soft Tissue Palpation. IEEE Robot. Autom. Lett. 2018, 3, 1168–1175. [Google Scholar] [CrossRef] [Green Version]
- Sornkarn, N.; Nanayakkara, T. Can a Soft Robotic Probe Use Stiffness Control Like a Human Finger to Improve Efficacy of Haptic Perception? IEEE Trans. Haptics 2016, 10, 183–195. [Google Scholar] [CrossRef]
- Naidu, A.S.; Escoto, A.; Fahmy, O.; Patel, R.V.; Naish, M.D. An autoclavable wireless palpation instrument for minimally invasive surgery. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; Volume 2016, pp. 6489–6492. [Google Scholar] [CrossRef]
- Nguyen, T.-D.; Lee, J.S. Recent Development of Flexible Tactile Sensors and Their Applications. Sensors 2021, 22, 50. [Google Scholar] [CrossRef] [PubMed]
- Alam Khan, F.; Ajmal, C.M.; Bae, S.; Seo, S.; Moon, H.; Baik, S. Silver Nanoflower Decorated Graphene Oxide Sponges for Highly Sensitive Variable Stiffness Stress Sensors. Small 2018, 14, e1800549. [Google Scholar] [CrossRef]
- Wan, Y.; Qiu, Z.; Hong, Y.; Wang, Y.; Zhang, J.; Liu, Q.; Wu, Z.; Guo, C.F. A Highly Sensitive Flexible Capacitive Tactile Sensor with Sparse and High-Aspect-Ratio Microstructures. Adv. Electron. Mater. 2018, 4, 1700586. [Google Scholar] [CrossRef]
- Deng, W.; Yang, T.; Jin, L.; Yan, C.; Huang, H.; Chu, X.; Wang, Z.; Xiong, D.; Tian, G.; Gao, Y.; et al. Cowpea-structured PVDF/ZnO nanofibers based flexible self-powered piezoelectric bending motion sensor towards remote control of gestures. Nano Energy 2018, 55, 516–525. [Google Scholar] [CrossRef]
- Xiong, J.; Cui, P.; Chen, X.; Wang, J.; Parida, K.; Lin, M.-F.; Lee, P.S. Skin-touch-actuated textile-based triboelectric nanogenerator with black phosphorus for durable biomechanical energy harvesting. Nat. Commun. 2018, 9, 4280. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Wondraczek, L.; Li, L.; Zhang, Y.; Zhu, Y.; Peng, M.; Mao, C. CaZnOS:Nd3+ Emits Tissue-Penetrating near-Infrared Light upon Force Loading. ACS Appl. Mater. Interfaces 2018, 10, 14509–14516. [Google Scholar] [CrossRef]
- Wang, J.; Xu, S.; Zhang, C.; Yin, A.; Sun, M.; Yang, H.; Hu, C.; Liu, H. Field effect transistor-based tactile sensors: From sensor configurations to advanced applications. Infomat 2022, 5, e12376. [Google Scholar] [CrossRef]
- Malhotra, N.; Hoang, K.; Desai, J.P. Towards the development of a MEMS-based force sensor for in vivo tumor tissue demarcation. In Proceedings of the 2023 International Symposium on Medical Robotics (ISMR), Atlanta, GA, USA, 19–21 April 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Cho, S.-H.; Lee, S.-M.; Lee, N.-Y.; Ko, B.C.; Kim, H.; Jang, D.-J.; Lee, J.-H. High-Resolution Tactile-Sensation Diagnostic Imaging System for Thyroid Cancer. Sensors 2023, 23, 3451. [Google Scholar] [CrossRef]
- Kara, O.C.; Venkatayogi, N.; Ikoma, N.; Alambeigi, F. A Reliable and Sensitive Framework for Simultaneous Type and Stage Detection of Colorectal Cancer Polyps. Ann. Biomed. Eng. 2023, 51, 1499–1512. [Google Scholar] [CrossRef]
- Campisano, F.; Ozel, S.; Ramakrishnan, A.; Dwivedi, A.; Gkotsis, N.; Onal, C.D.; Valdastri, P. Towards a soft robotic skin for autonomous tissue palpation. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6150–6155. [Google Scholar] [CrossRef] [Green Version]
- Lai, W.; Cao, L.; Tan, R.X.; Tan, Y.C.; Li, X.; Phan, P.T.; Tiong, A.M.H.; Tjin, S.C.; Phee, S.J. An Integrated Sensor-Model Approach for Haptic Feedback of Flexible Endoscopic Robots. Ann. Biomed. Eng. 2019, 48, 342–356. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, C.C.; Thai, M.T.; Hoang, T.T.; Davies, J.; Phan, P.T.; Zhu, K.; Wu, L.; Brodie, M.A.; Tsai, D.; Ha, Q.P.; et al. Development of a soft robotic catheter for vascular intervention surgery. Sens. Actuators A Phys. 2023, 357, 114380. [Google Scholar] [CrossRef]
- Gent, A.N. On the relation between indentation hardness and Young’s modulus. Rubber Chem. Technol. 1958, 31, 896–906. [Google Scholar] [CrossRef]
- Thai, M.T.; Phan, P.T.; Tran, H.A.; Nguyen, C.C.; Hoang, T.T.; Davies, J.; Rnjak-Kovacina, J.; Phan, H.; Lovell, N.H.; Do, T.N. Advanced Soft Robotic System for In Situ 3D Bioprinting and Endoscopic Surgery. Adv. Sci. 2023, 10, 2205656. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Working Mechanism | Range | Sensitivity | Structure | Material |
|---|---|---|---|---|---|
| [22] | Piezoresistive-based | 0–10 KPa | 0.572 kPa−1 | Foam | GO-AgNF-PI sponge |
| [23] | Piezo-capacitive-based | 0–10 KPa | 1.2 kPa−1 | Lotus mould substrate/AgNWs electrode | Ag NWs/PDMS/CPI |
| [24] | Piezoelectric-based | 1–30 kPa | 0.33 V kPa−1 | Composite microfiber | P(VDF-TrFE)/BaTiO3 |
| [25] | Triboelectric-based | 1–10 N | N/A | PET fabric coat black phosphorus and particles | HCOENPs/BP/PET |
| [26] | Optical-based | 0–1000 N | N/A | Composite disk | CaZnOS: Nd3+/epoxy |
| Reference | Dimension | Measuring Range | Mechanical Flexibility (Drive) | Optical Transparency | Others |
|---|---|---|---|---|---|
| [28] | Diameter = 2 mm | 0–0.3 N | Steerable robotic probe | No | Maximum hysteresis = 5.58% |
| [29] | Bulky and not suitable for in vivo | 0–155 KPa | N/A | Blur | N/A |
| [30] | 00-40 Shore hardness | N/A | Blur | Accuracy, sensitivity, and reliability > 90% | |
| Proposed sensor | Diameter = 10 mm | 0–2.5 MPa | SMAM | Yes | Sensitivity = 1.25 mbar |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Nguyen, C.C.; Hoang, T.T.; Do, T.N.; Phan, H.-P. Transparent Pneumatic Tactile Sensors for Soft Biomedical Robotics. Sensors 2023, 23, 5671. https://doi.org/10.3390/s23125671
Zhao S, Nguyen CC, Hoang TT, Do TN, Phan H-P. Transparent Pneumatic Tactile Sensors for Soft Biomedical Robotics. Sensors. 2023; 23(12):5671. https://doi.org/10.3390/s23125671
Chicago/Turabian StyleZhao, Sinuo, Chi Cong Nguyen, Trung Thien Hoang, Thanh Nho Do, and Hoang-Phuong Phan. 2023. "Transparent Pneumatic Tactile Sensors for Soft Biomedical Robotics" Sensors 23, no. 12: 5671. https://doi.org/10.3390/s23125671
APA StyleZhao, S., Nguyen, C. C., Hoang, T. T., Do, T. N., & Phan, H. -P. (2023). Transparent Pneumatic Tactile Sensors for Soft Biomedical Robotics. Sensors, 23(12), 5671. https://doi.org/10.3390/s23125671