
3D TDOA Emitter Localization Using Conic Approximation


Abstract
:1. Introduction
2. TDOA Localization in 3D Space
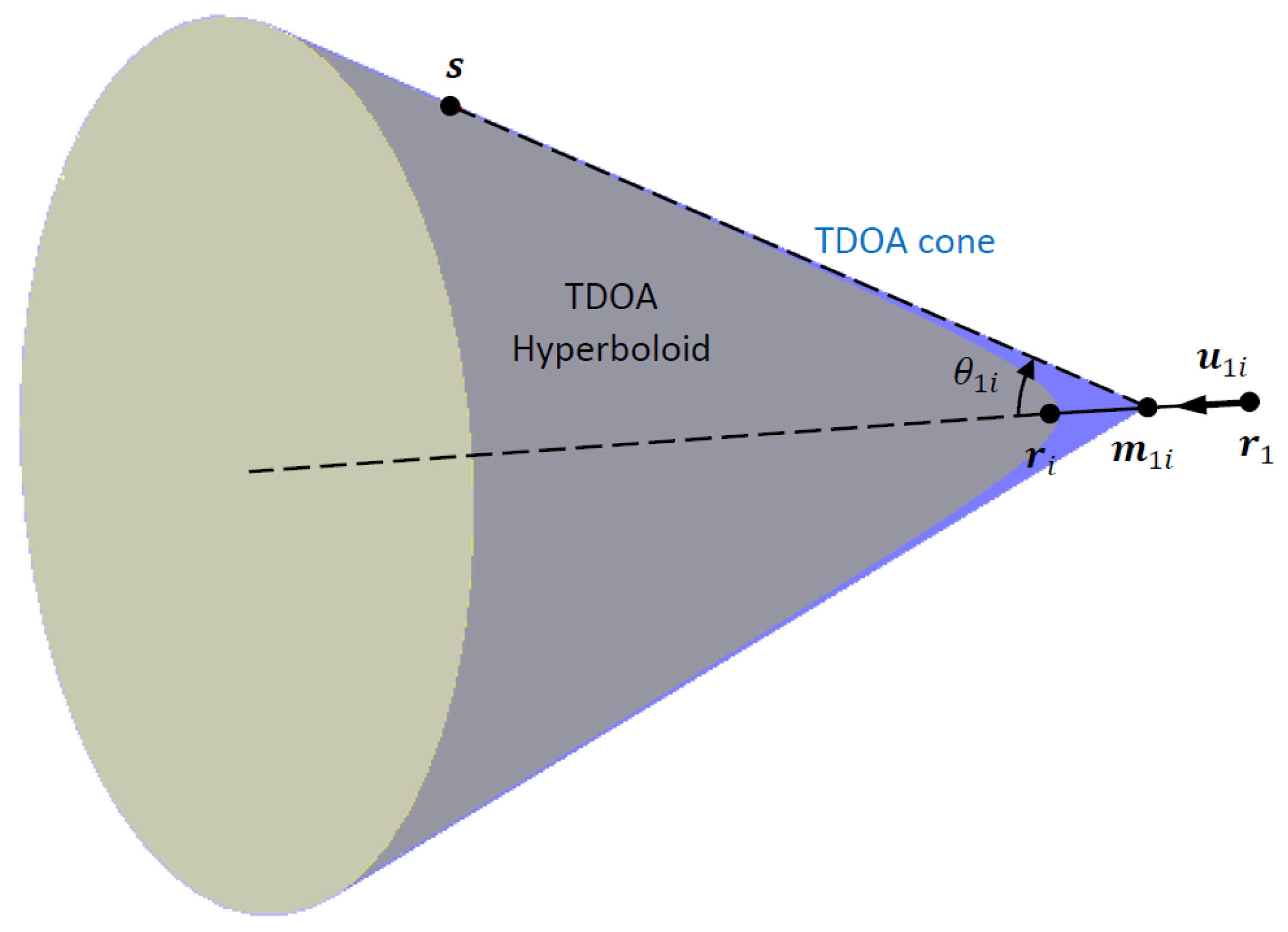
3. Conic Approximation of TDOA Hyperboloids
- The mid-point between TDOA sensor pairs
- The unit vector for the TDOA sensor pair direction
- The 1D-AOA
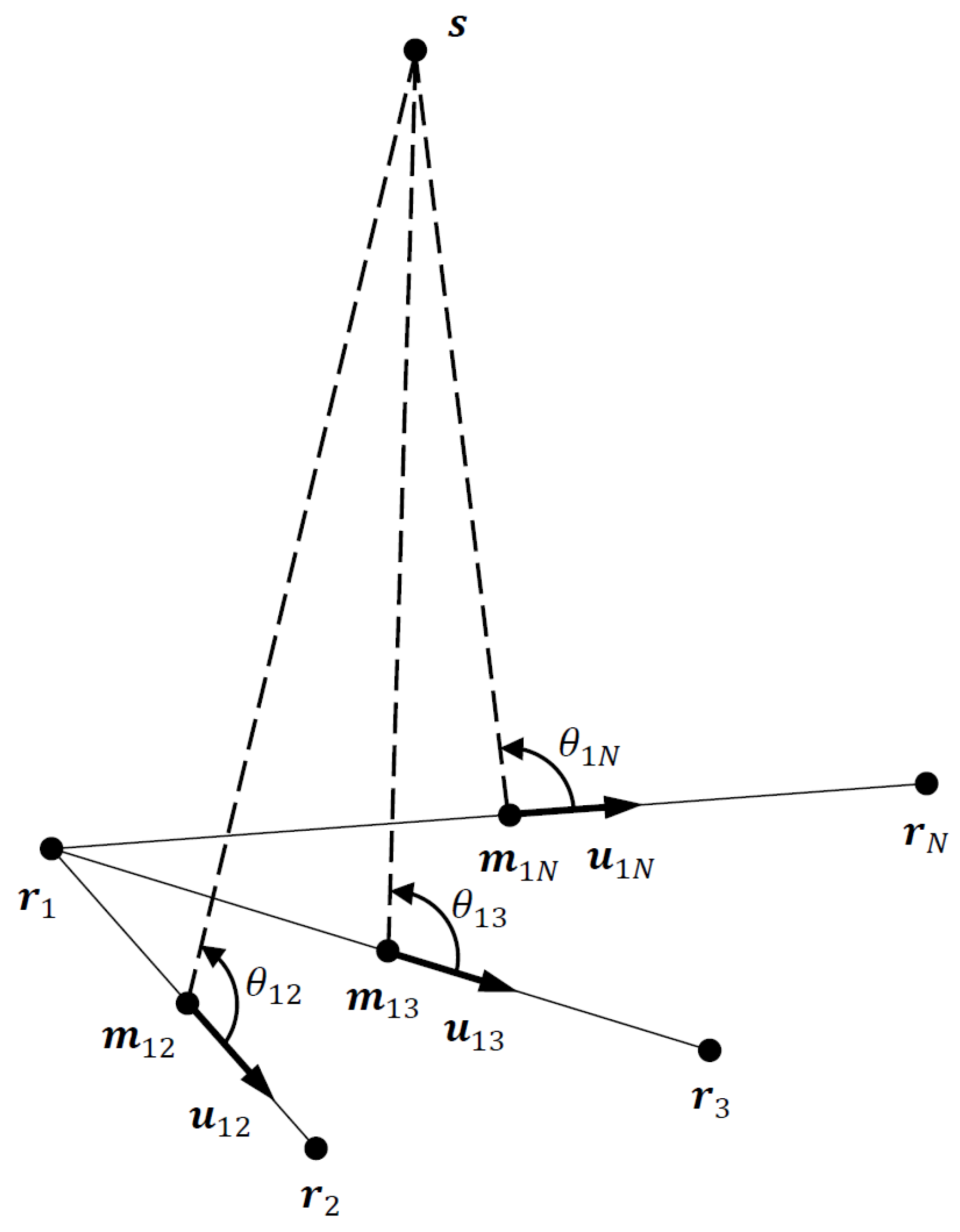
4. Triangulation of 1D-AOAs
5. New Algorithm for 3D TDOA Localization Using 1D-AOAs
5.1. Algorithm Derivation
5.2. Performance Analysis of the IWLS Estimator
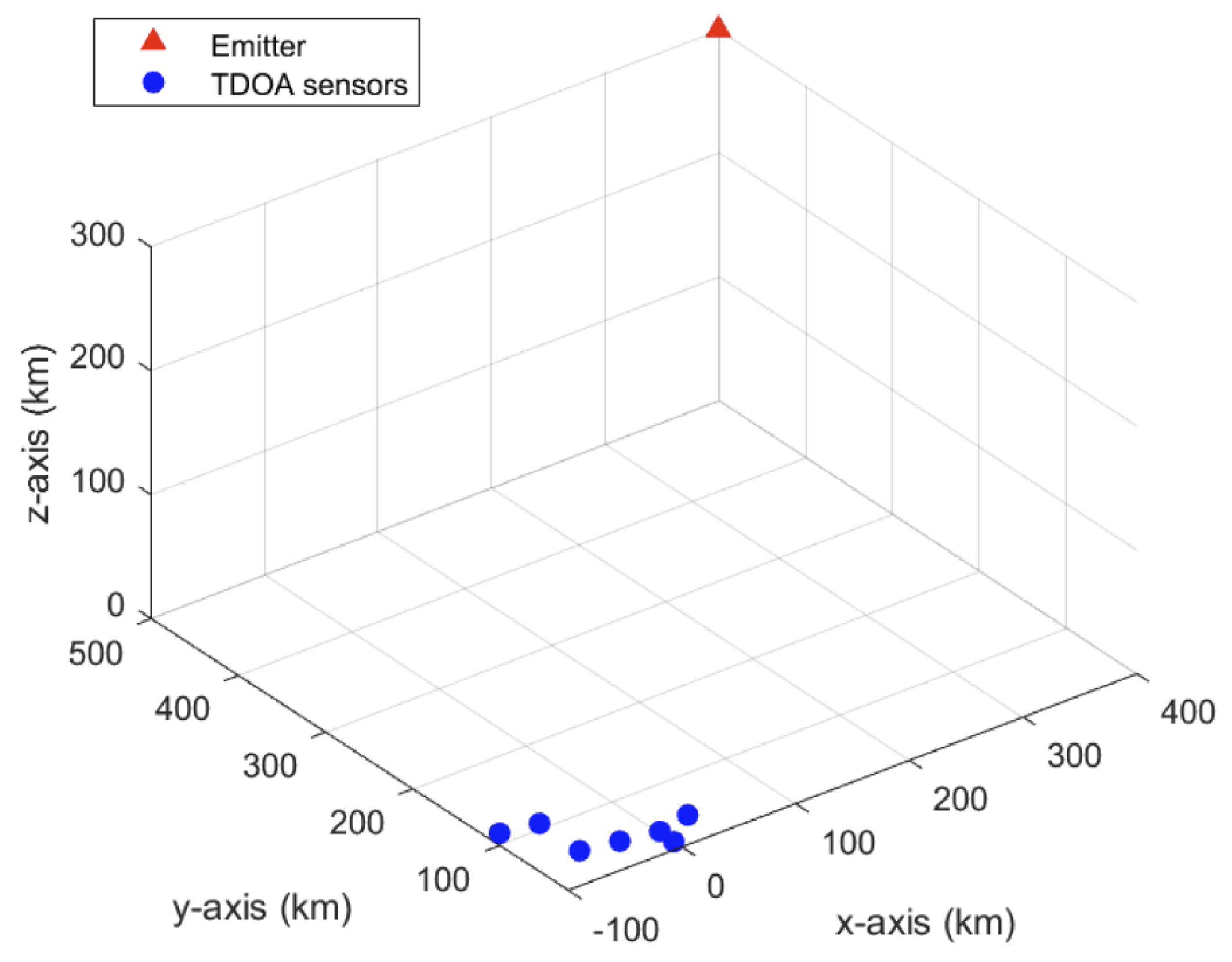
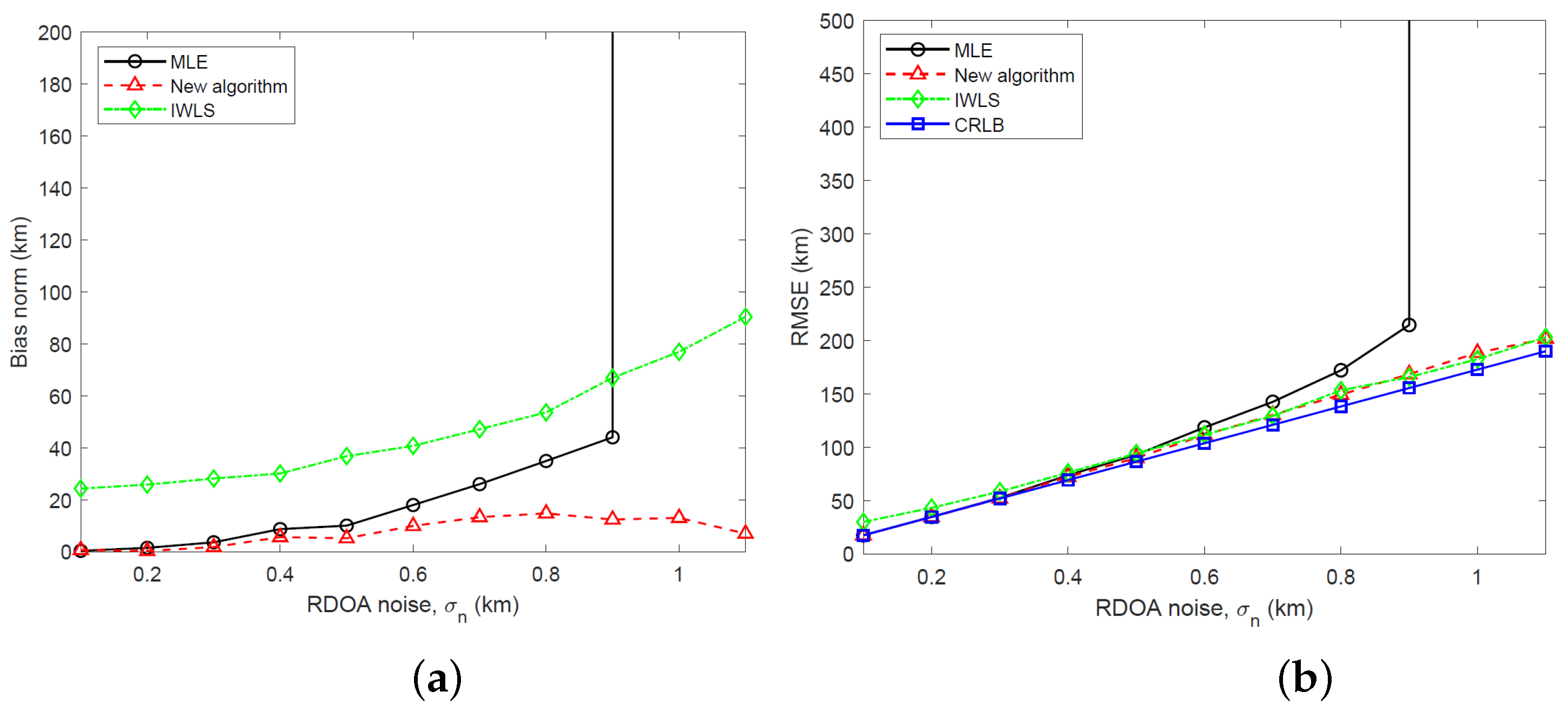
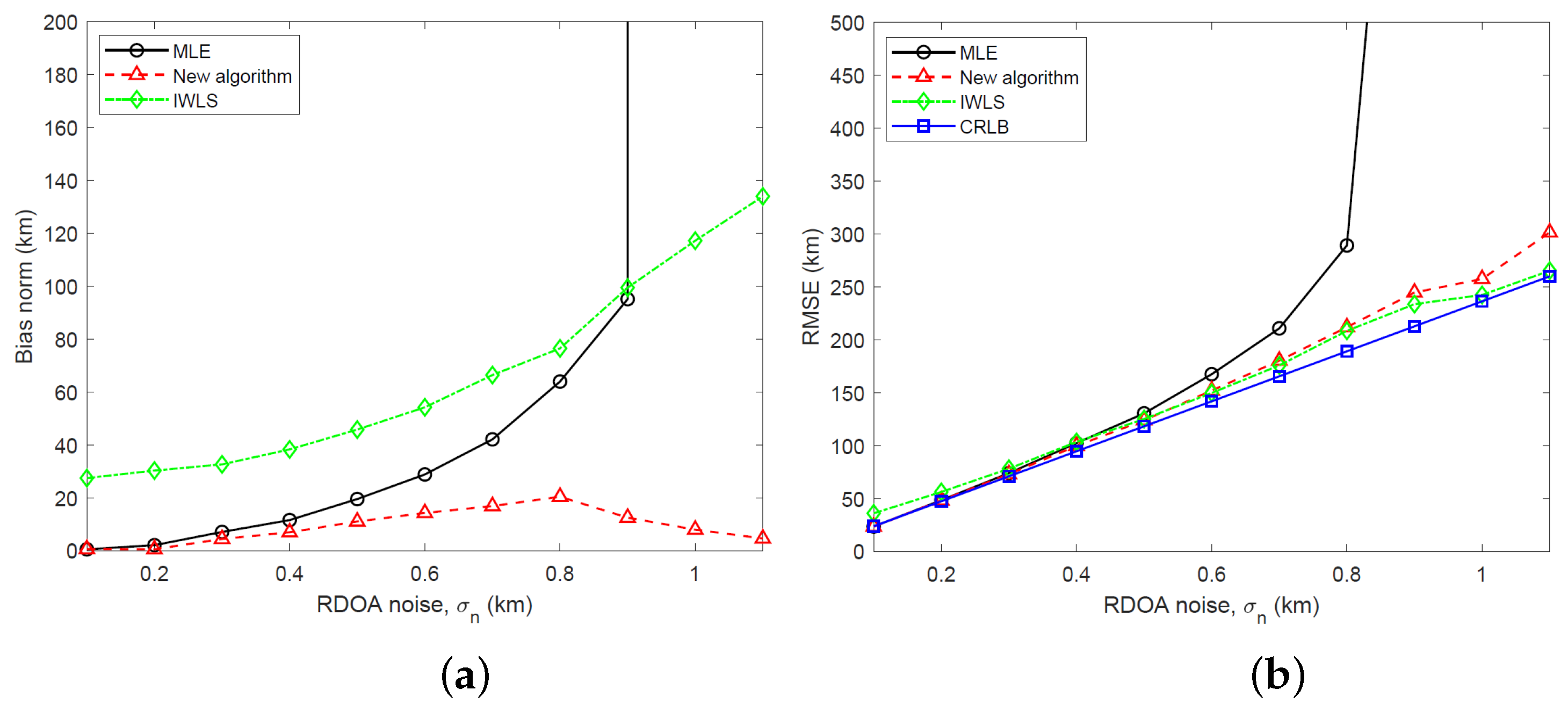
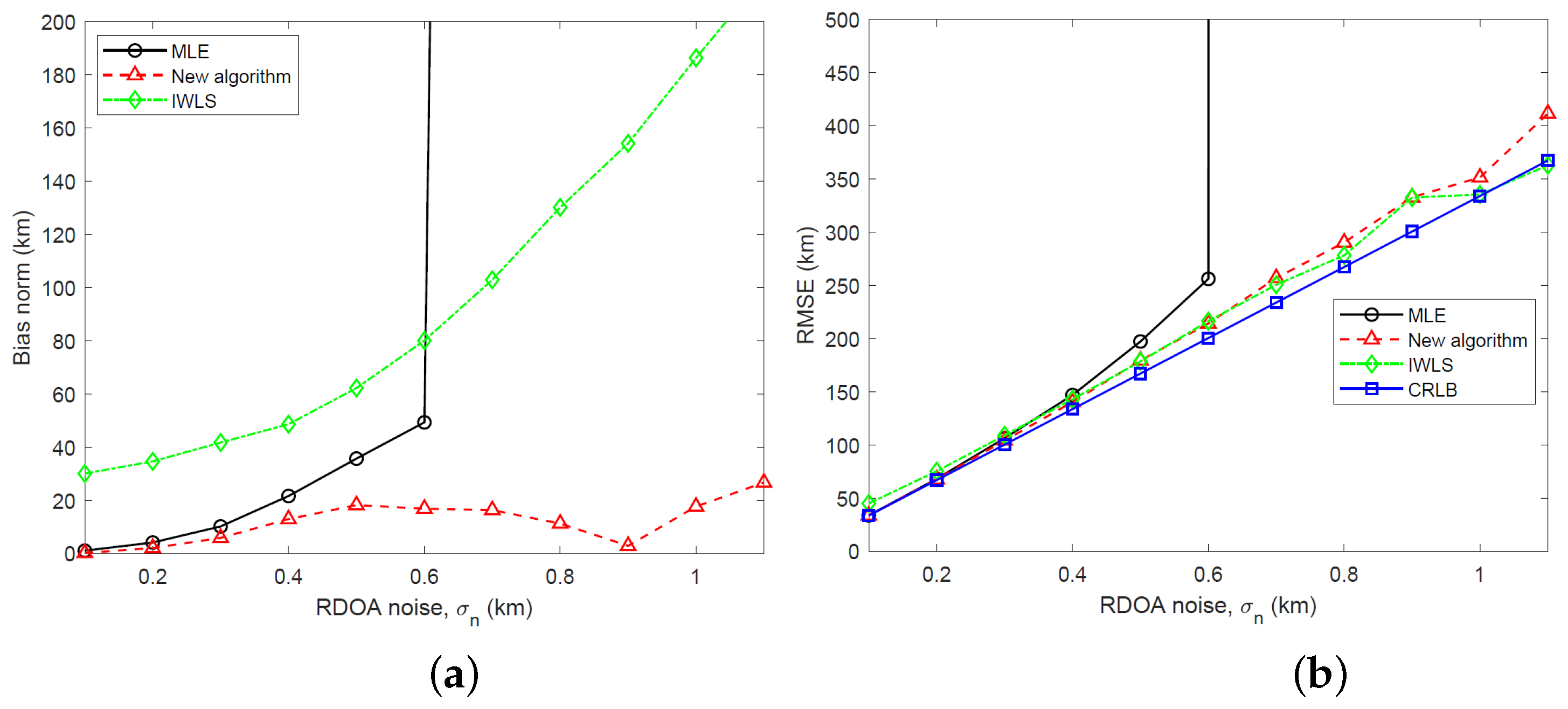
6. Simulation Studies
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Torrieri, D.J. Statistical theory of passive location systems. IEEE Trans. Aerosp. Electron. Syst. 1984, 20, 183–198. [Google Scholar] [CrossRef] [Green Version]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef] [Green Version]
- Beck, A.; Stoica, P.; Li, J. Exact and Approximate Solutions of Source Localization Problems. IEEE Trans. Signal Process. 2008, 56, 1770–1778. [Google Scholar] [CrossRef]
- Lui, K.W.K.; Chan, F.K.W.; So, H.C. Semidefinite Programming Approach for Range-Difference Based Source Localization. IEEE Trans. Signal Process. 2009, 57, 1630–1633. [Google Scholar] [CrossRef]
- Doğançay, K.; Hashemi-Sakhtsari, A. Target tracking by time difference of arrival using recursive smoothing. Signal Process. 2005, 85, 667–679. [Google Scholar] [CrossRef]
- Doğançay, K. Emitter localization using clustering-based bearing association. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 525–536. [Google Scholar] [CrossRef]
- Athley, F. Threshold region performance of maximum likelihood direction of arrival estimators. IEEE Trans. Signal Process. 2005, 53, 1359–1373. [Google Scholar] [CrossRef]
- Dogancay, K.; Nguyen, N.H. Low-complexity weighted pseudolinear estimator for TDOA localization with systematic error correction. In Proceedings of the 2016 24th European Signal Processing Conference (EUSIPCO), Budapest, Hungary, 28 August–2 September 2016; pp. 2086–2090. [Google Scholar] [CrossRef]
- Du, H.J.; Lee, J.P. Passive Geolocation Using TDOA Method from UAVs and Ship/Land-Based Platforms for Maritime and Littoral Area Surveillance; Technical Memorandum DRDC Ottawa TM 2004-033; Defence R&D Canada: Ottawa, ON, Canada, 2004. [Google Scholar]
- Jin, B.; Xu, X.; Zhang, T. Robust Time Difference of Arrival (TDOA) Localization Using Weighted Least Squares with Cone Tangent Plane Constraint. Sensors 2018, 18, 778. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Han, Z.; Leung, C.S.; So, H.C.; Constantinides, A.G. Augmented Lagrange Programming Neural Network for Localization Using Time Difference of Arrival Measurements. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 3879–3884. [Google Scholar] [CrossRef] [PubMed]
- Wu, P.; Su, S.; Zuo, Z.; Guo, X.; Sun, B.; Wen, X. Time Difference of Arrival (TDoA) Localization Combining Weighted Least Squares and Firefly Algorithm. Sensors 2019, 19, 2554. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, Y.; Ho, K.C.; Wan, Q. Solution and Analysis of TDOA Localization of a Near or Distant Source in Closed Form. IEEE Trans. Signal Process. 2019, 67, 320–335. [Google Scholar] [CrossRef]
- Diez-Gonzalez, J.; Alvarez, R.; Sanchez-Gonzalez, L.; Fernandez-Robles, L.; Perez, H.; Castejon-Limas, M. 3D Tdoa Problem Solution with Four Receiving Nodes. Sensors 2019, 19, 2892. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zou, Y.; Liu, H. TDOA Localization With Unknown Signal Propagation Speed and Sensor Position Errors. IEEE Commun. Lett. 2020, 24, 1024–1027. [Google Scholar] [CrossRef]
- Oguz-Ekim, P. TDOA based localization and its application to the initialization of LiDAR based autonomous robots. Robot. Auton. Syst. 2020, 131, 103590. [Google Scholar] [CrossRef]
- Zou, J.; Sun, Y.; Wan, Q. An Alternating Minimization Algorithm for 3-D Target Localization Using 1-D AOA Measurements. IEEE Sensors Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Knapp, C.H.; Carter, G.C. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef] [Green Version]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Bertsekas, D.P. Nonlinear Programming, 2nd ed.; Athena Scientific: Belmont, MA, USA, 1999. [Google Scholar]
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer: New York, NY, USA, 2006. [Google Scholar] [CrossRef] [Green Version]
- Lui, K.W.K.; So, H.C. A study of two-dimensional sensor placement using time difference of arrival measurements. Digit. Signal Process. 2009, 19, 650–659. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Index i | (km) | |
|---|---|---|
| 1 | – | 702.9225 |
| 2 | 0.2120 | 696.5630 |
| 3 | 0.0136 | 703.7045 |
| 4 | 0.0403 | 699.4998 |
| 5 | 0.0560 | 696.5630 |
| 6 | 0.1364 | 686.2215 |
| 7 | 0.2946 | 663.4003 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dogancay, K.; Hmam, H. 3D TDOA Emitter Localization Using Conic Approximation. Sensors 2023, 23, 6254. https://doi.org/10.3390/s23146254
Dogancay K, Hmam H. 3D TDOA Emitter Localization Using Conic Approximation. Sensors. 2023; 23(14):6254. https://doi.org/10.3390/s23146254
Chicago/Turabian StyleDogancay, Kutluyil, and Hatem Hmam. 2023. "3D TDOA Emitter Localization Using Conic Approximation" Sensors 23, no. 14: 6254. https://doi.org/10.3390/s23146254
APA StyleDogancay, K., & Hmam, H. (2023). 3D TDOA Emitter Localization Using Conic Approximation. Sensors, 23(14), 6254. https://doi.org/10.3390/s23146254