
Research on Denoising Method for Hydroelectric Unit Vibration Signal Based on ICEEMDAN–PE–SVD



Abstract
:1. Introduction
2. Related Theory and Methods
2.1. ICEEMDAN Algorithm
2.2. PE Algorithm
2.3. SVD Algorithm
3. ICEEMDAN–PE–SVD-Based Vibration Signal Denoising for Hydropower Units
| Algorithm 1. Denoising method based on ICEEMDAN–PE–SVD for hydroelectric turbine vibration signals. |
| Input: Original signal . |
| Output: Denoised signal . |
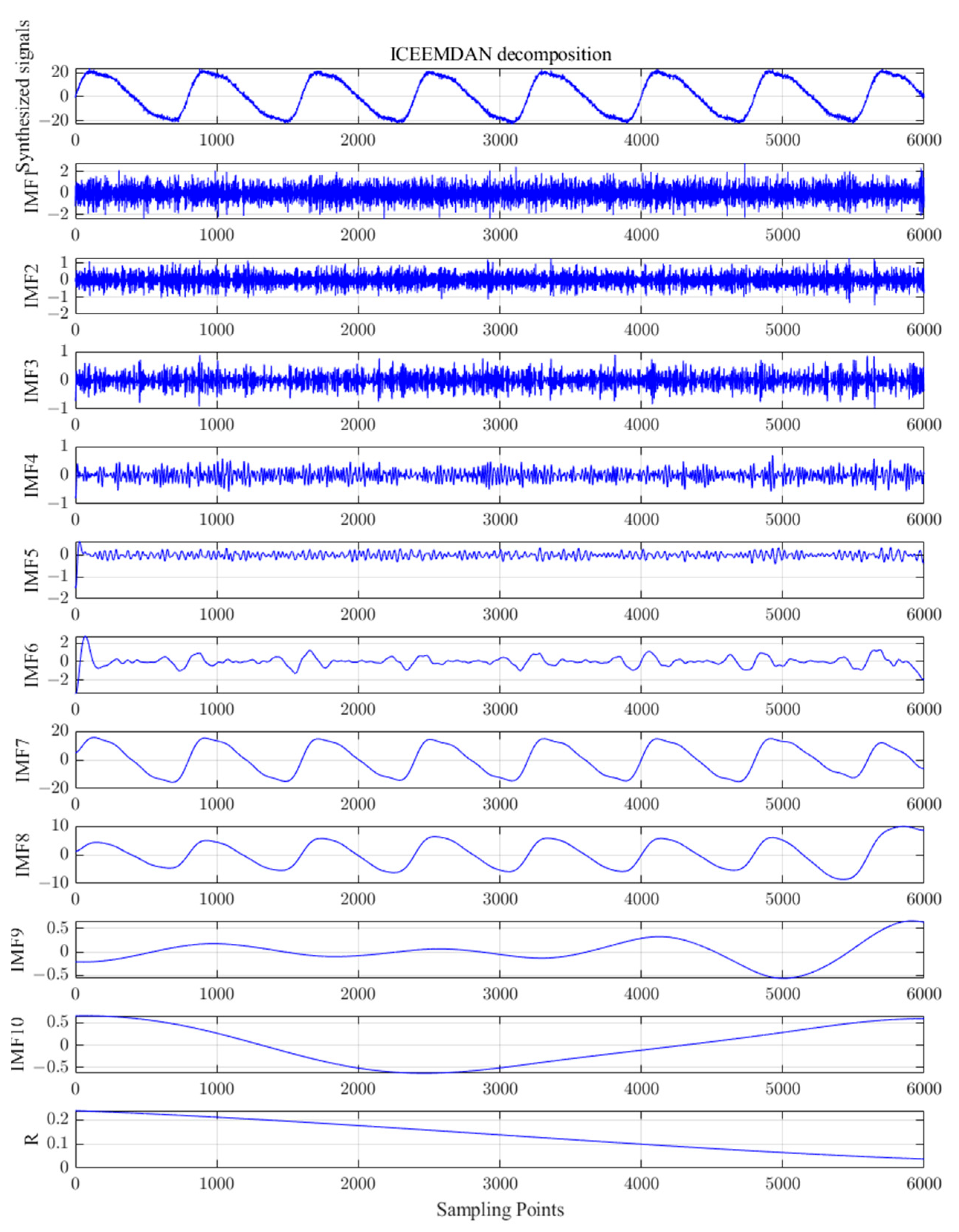
| 1: According to Equations (1)–(8), the ICEEMDAN decomposition of the original signal is calculated to obtain a set of intrinsic mode functions () and a residue component (). |
| 2: The PE of the resulting IMF components is calculated according to Equations (9)–(13). In [34], Brandt et al., after a lot of experiments and projections, recommended that the statistical results have high reasonableness when the embedding dimension is taken from 3 to 7, and the delay time has less influence on the calculation of the PE. Therefore, in this paper, we chose the number of embedding bits of , and the delay time of . |
| 3: The normalized PE threshold is set to 0.3 according to the results of multiple simulation experiments and combined with the PE calculation principle. |
| for in do |
| if , is selected as the valid IMF component |
| return all the valid IMF components. |
| 4: The signal is obtained by reconstructing it according to all the valid IMF components. |
| 5: The SVD decomposition of occurs according to Equations (14) and (15). |
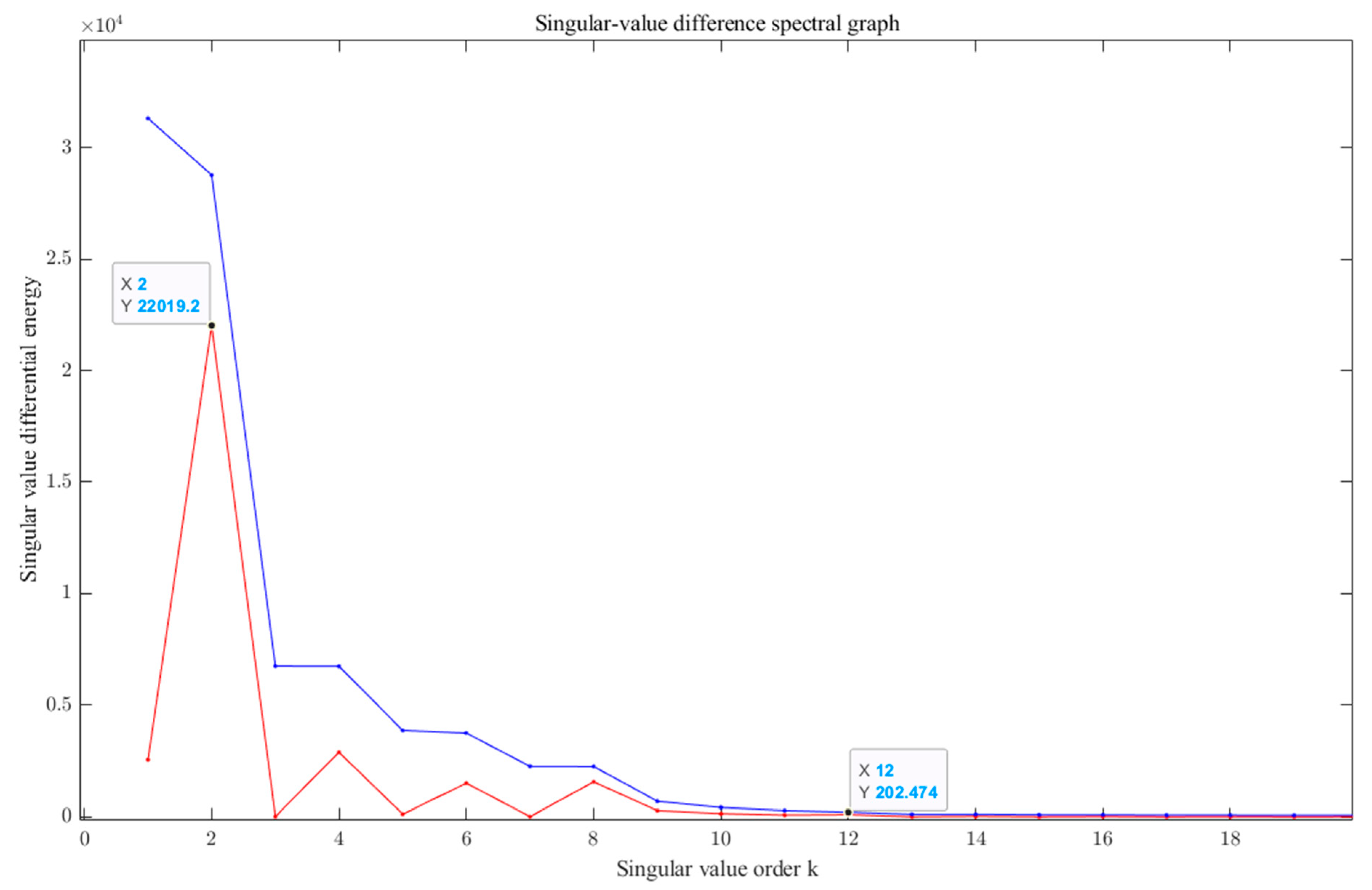
| 6: Calculate the difference spectrum of singular values obtained from the decomposition according to Equation (16). |
| 7: Combined with the variation trend of the difference spectrum, an appropriate singular value order k is selected to reconstruct the characteristic matrix , and then the matrix is converted to the denoised signal . |
| 8: return . This achieves a double denoising effect and forms the final denoised signal, finishing the denoising process of the vibration signal of the hydropower unit. |
4. Simulation Analysis
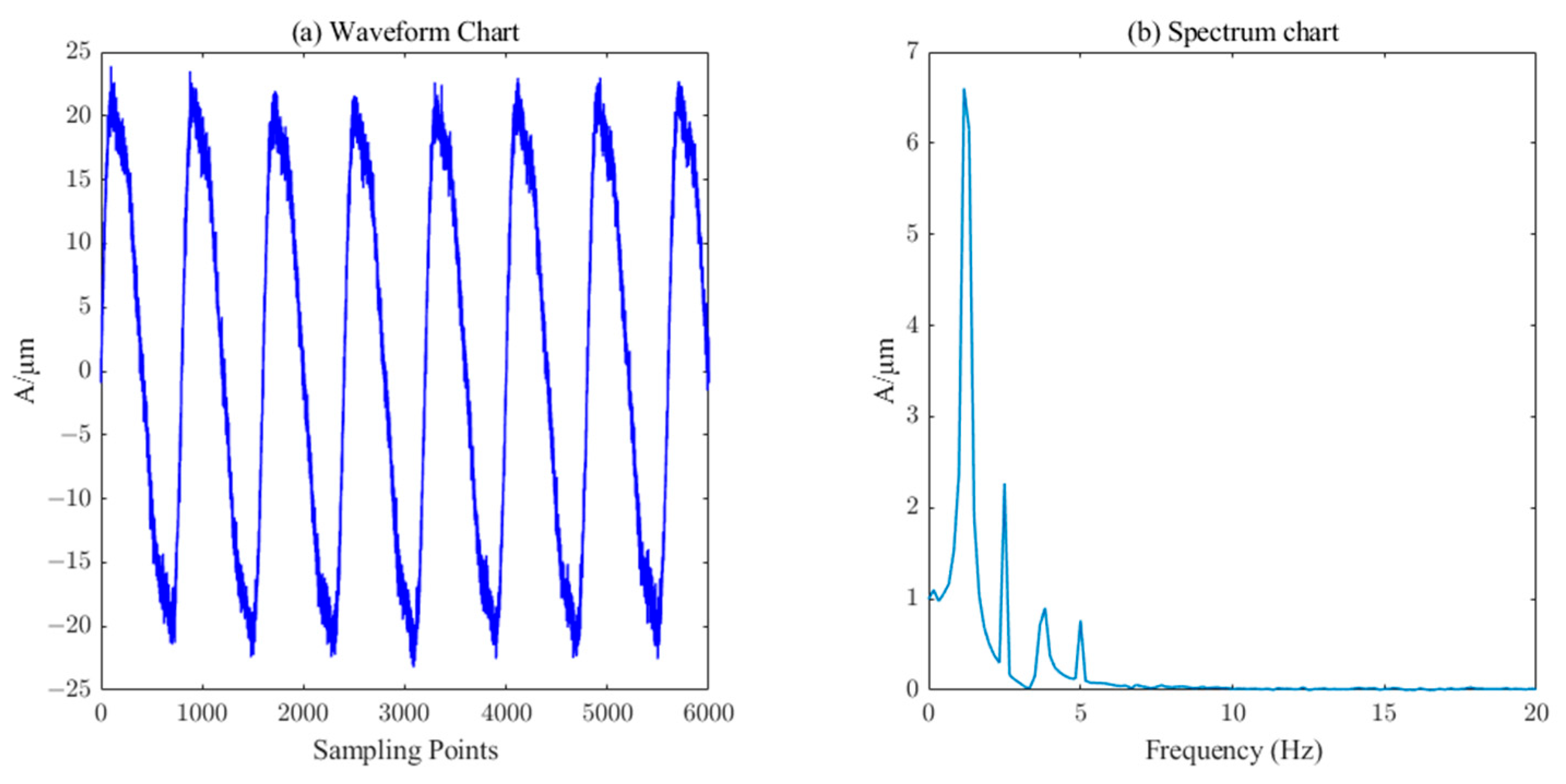
4.1. Construction of the Simulation Signal
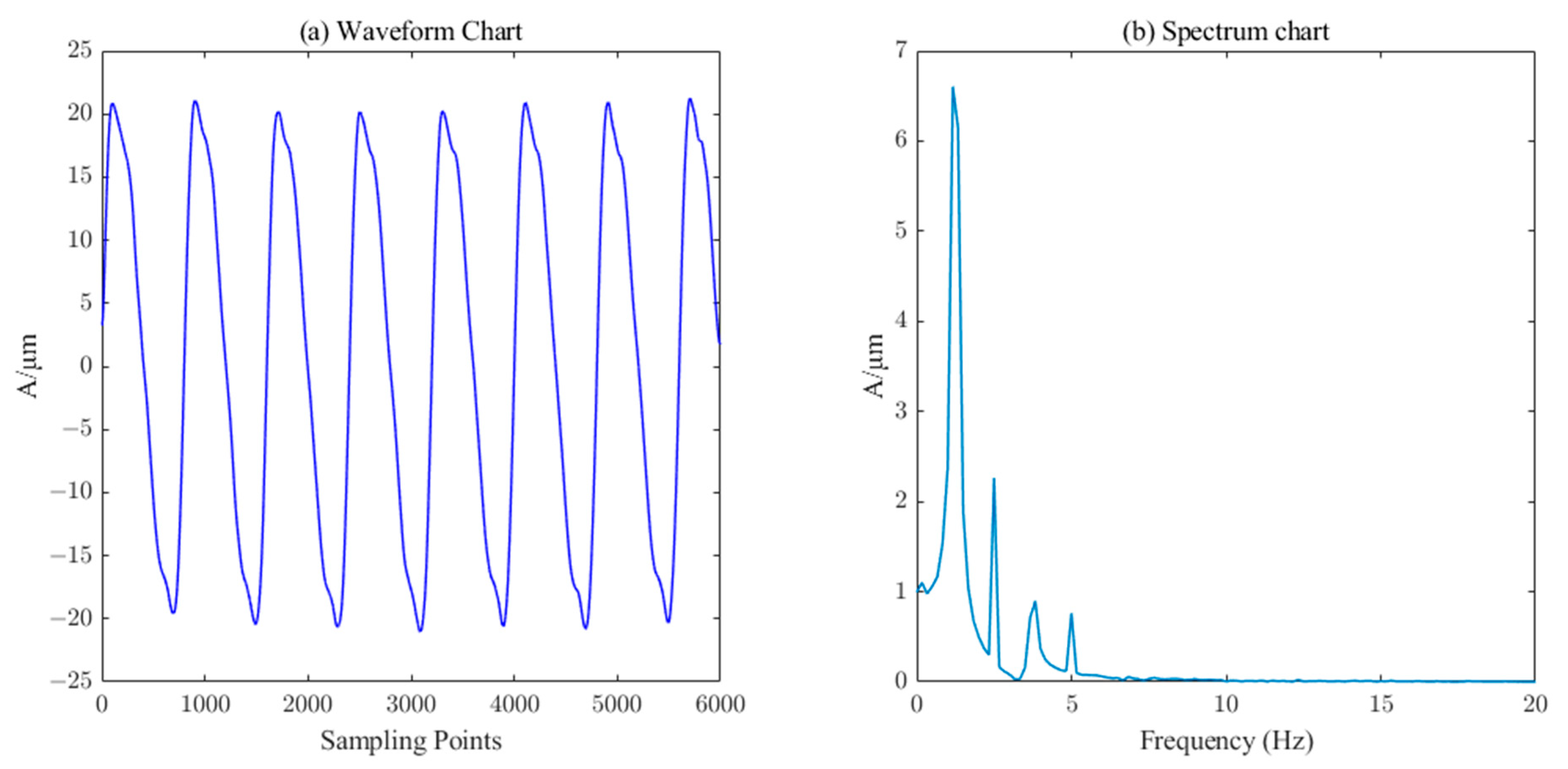
4.2. Noise Reduction in Simulated Signals by ICEEMDAN–PE–SVD
4.3. Comparative Analysis of Related Denoising Method Indices
- (1)
- Signal-to-noise ratio (SNR):
- (2)
- Root-mean-square error (RMSE):
- (3)
- Mean absolute error (MAE):
5. Case Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BSS | F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 | F9 | F10 | R |
|---|---|---|---|---|---|---|---|---|---|---|---|
| UG | 0.972 | 0.748 | 0.535 | 0.402 | 0.287 | 0.225 | 0.163 | 0.148 | 0.148 | 0.139 | 0.017 |
| LG | 0.964 | 0.784 | 0.55 | 0.329 | 0.269 | 0.189 | 0.163 | 0.15 | 0.15 | – | 0.135 |
| WG | 0.964 | 0.75 | 0.536 | 0.368 | 0.282 | 0.208 | 0.177 | 0.163 | 0.151 | 0.149 | 0.146 |
| Denoising Method | UG NRR/dB | LG NRR/dB | WG NRR/dB |
|---|---|---|---|
| Wavelet Threshold | 2.1569 | 3.2387 | 4.7788 |
| SVD | 11.1864 | 20.2995 | 16.5618 |
| CEEMDAN–PE | 10.1356 | 12.1863 | 15.7854 |
| ICEEMDAN–PE | 6.6525 | 16.8692 | 14.1723 |
| ICEEMDAN–PE–SVD | 11.7286 | 20.311 | 16.6323 |
6. Conclusions
- (1)
- Through simulation tests, the ICEEMDAN–PE–SVD method proposed in this paper, after the double-noise reduction process, obtains a root-mean-square error as low as 0.1152 and the signal-to-noise ratio is improved to 42.0941, which maximizes the noise elimination while retaining the useful information within the fault signal. The method has a good noise reduction and pulse effect, and avoids modal mixing in the EMD decomposition process and the pseudo-modal problem of CEEMDAN decomposition.
- (2)
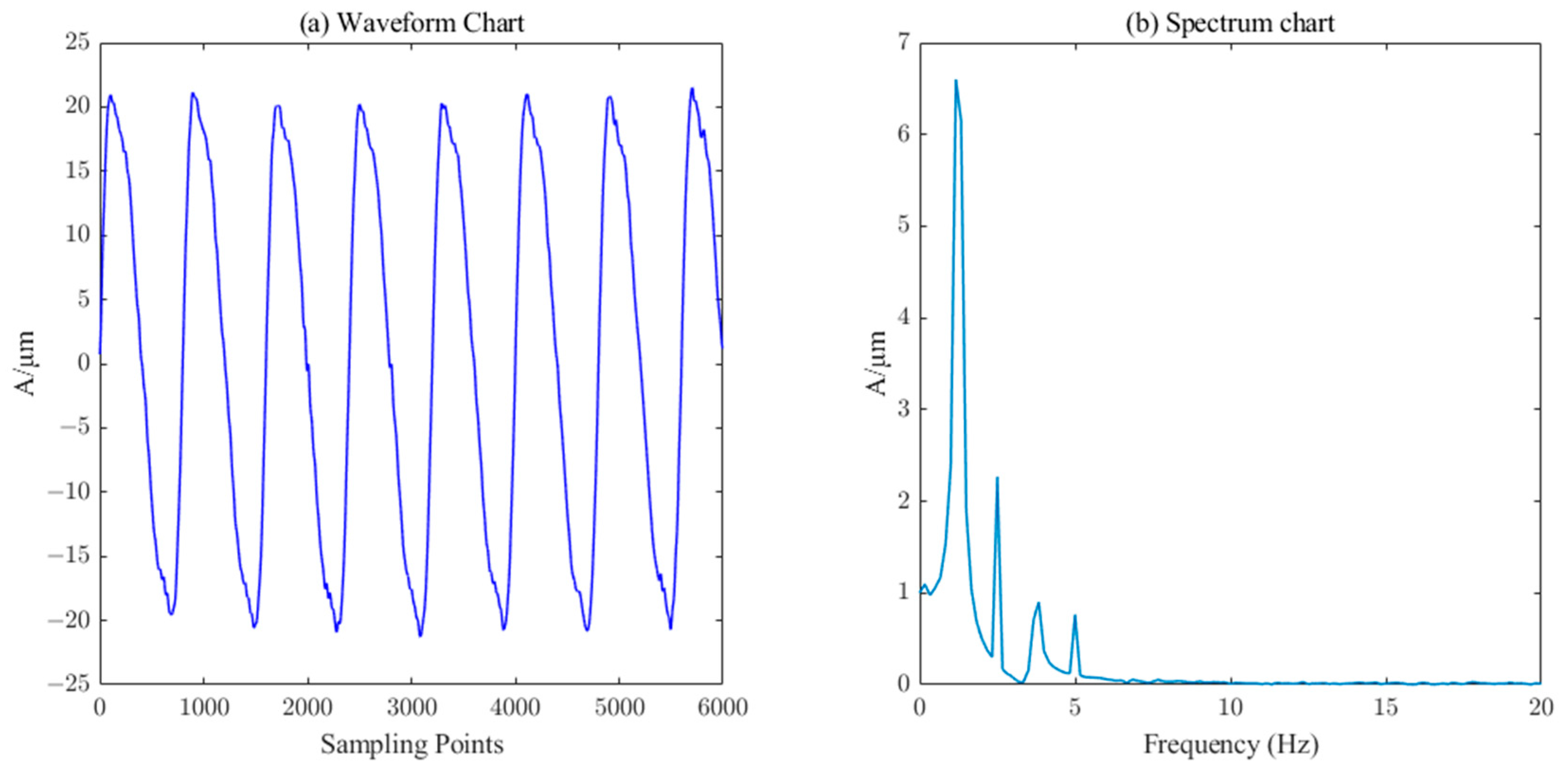
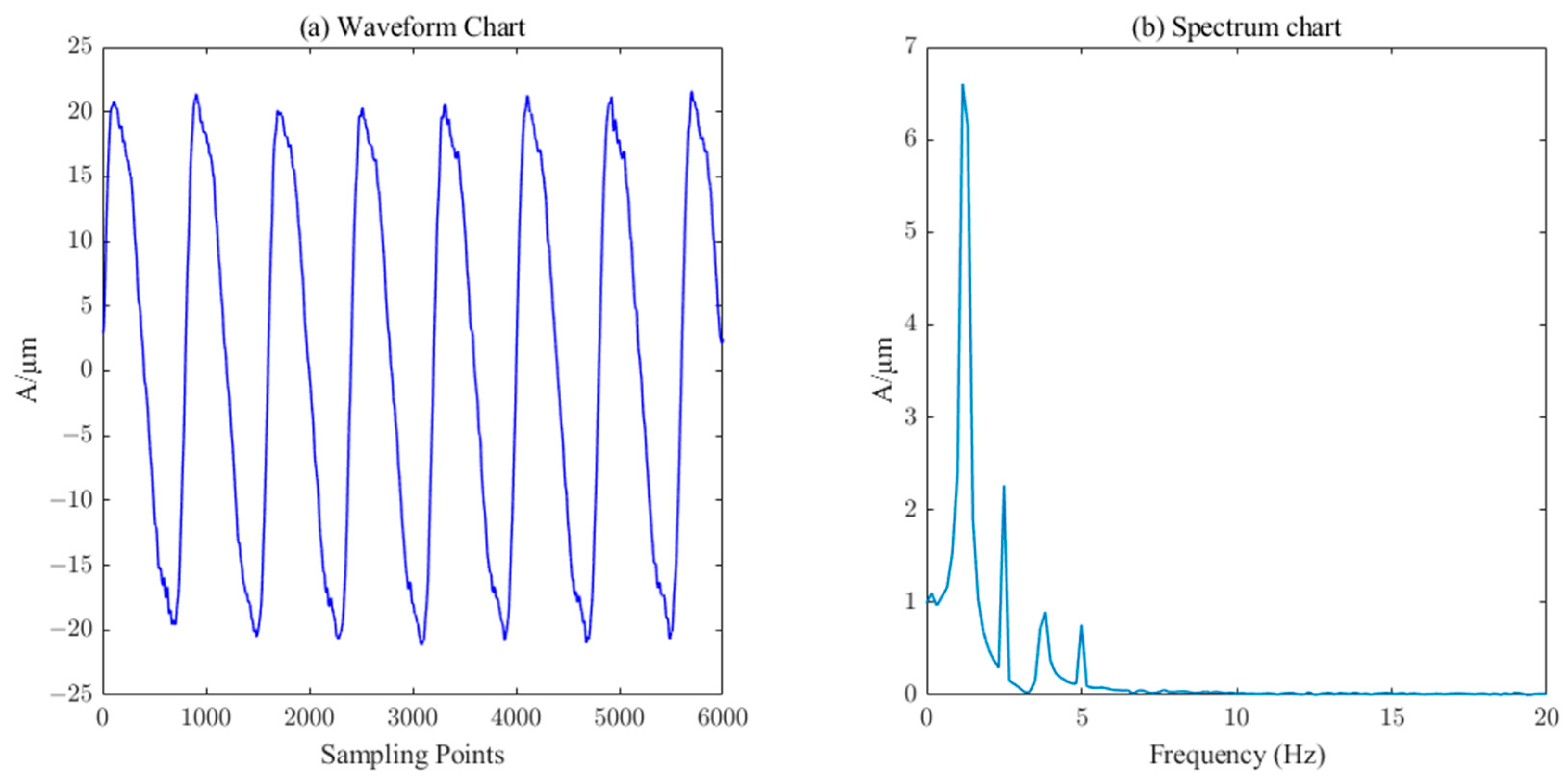
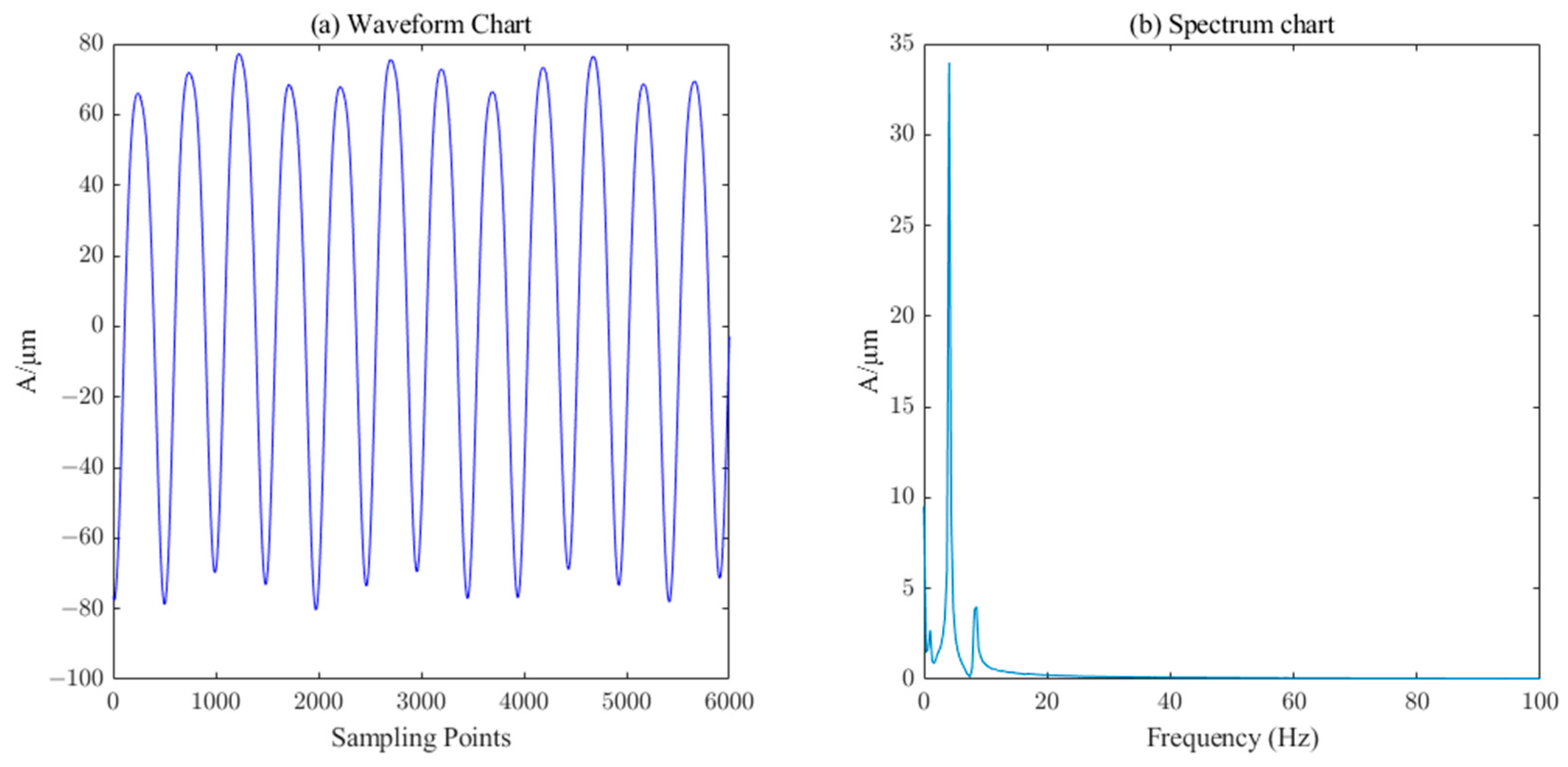
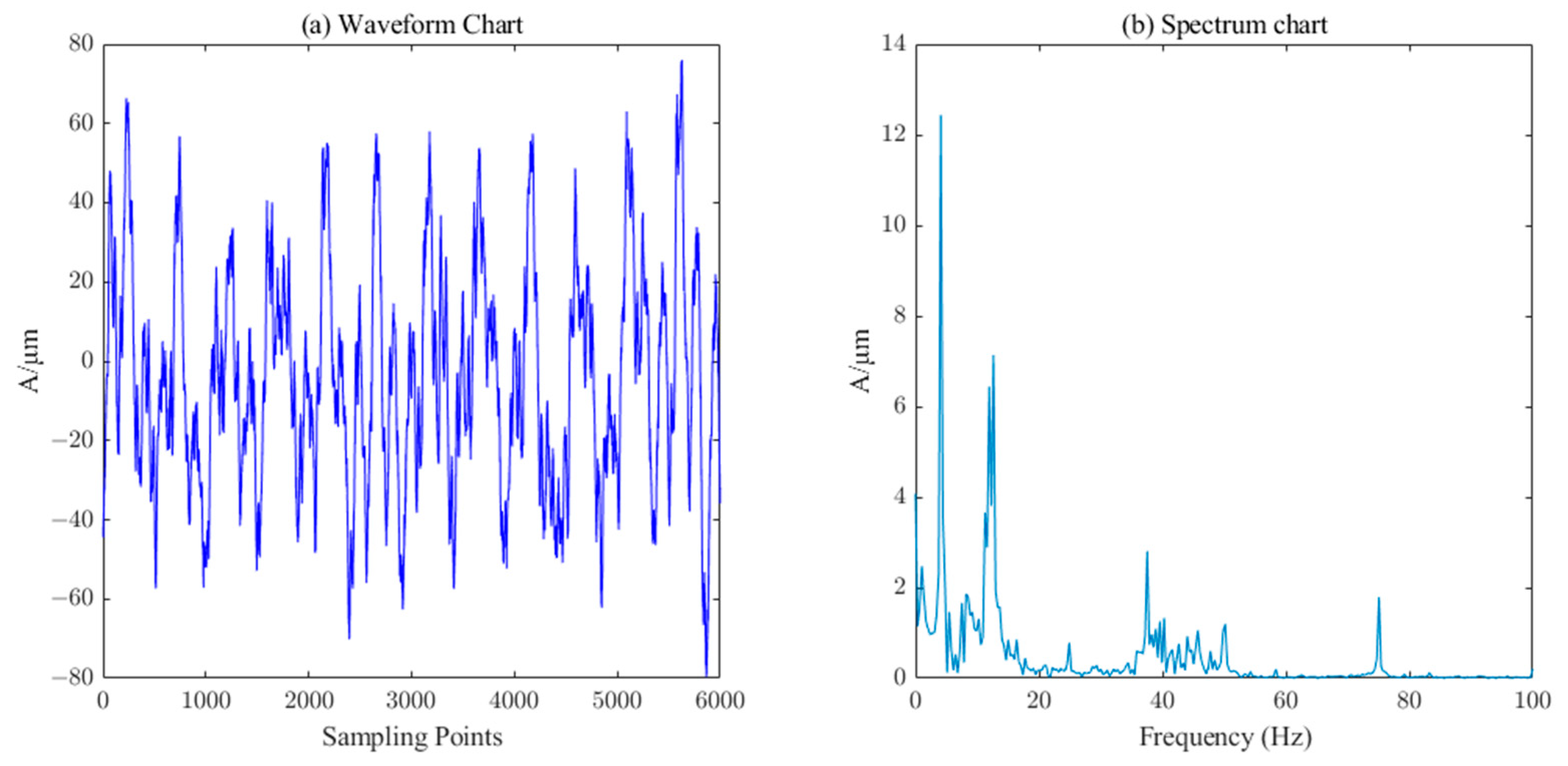
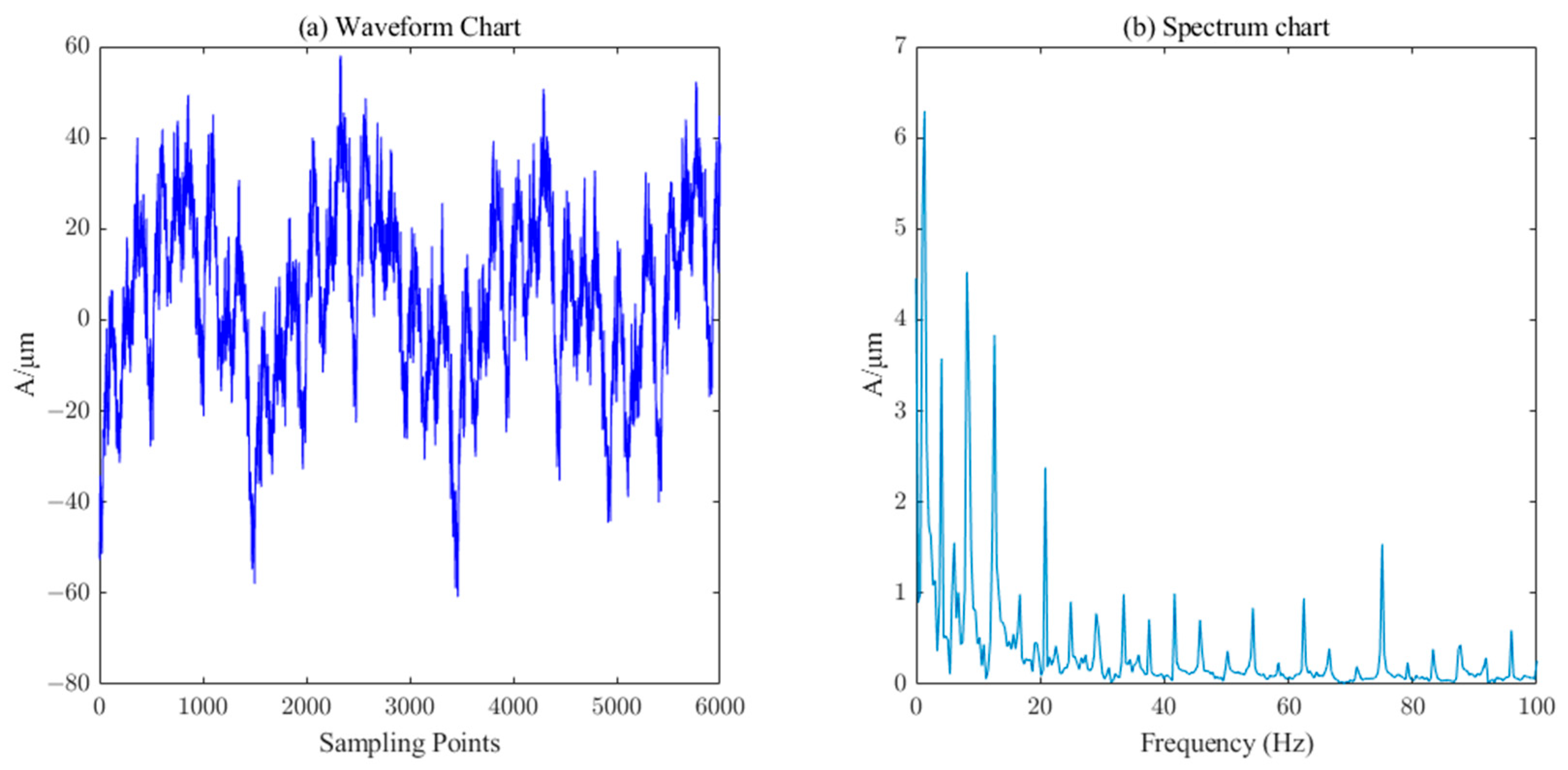
- Through the case analysis of the oscillation data of the measured hydro-generator unit’s upper guide in the X-direction, the lower guide in the Y-direction, and the water guide in the X-direction, it was found that the method can effectively reduce the noise of the measured unit data and extract the characteristic frequency of the vibration signal more accurately so that the cause of the unit vibration can be judged by the frequency. The denoising effect of the measured signal was better than that of the traditional method, as it can effectively filter out the noise components and provide a powerful tool for the online monitoring of equipment vibration signals.
- (3)
- The research results of this paper can also be widely applied to signal denoising and feature extraction of high-safety equipment in nuclear power, power grids, the petrochemical industry, and other industries.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, X.; Lin, H.; Liu, Y.; Hu, B. Fusion of PCA and adaptive K-Means clustering for online fault detection of hydroelectric units. J. Electron. Meas. Instrum. 2022, 36, 260–267. [Google Scholar] [CrossRef]
- He, K.; Wang, W.; Jin, Y.; Li, C.; Liu, W.; Chen, Q. Research on intelligent fault diagnosis method of hydroelectric units based on CNN-SVM. Hydroelectr. Energy Sci. 2023, 41, 207–210+215. [Google Scholar] [CrossRef]
- Chen, X.; Xiao, Y.; Xiao, F.; Wang, Y.; Xiao, Z. Early warning method for fault analysis of hydroelectric units based on EEMD-SD vibration signal analysis. Hydroelectr. New Energy 2023, 37, 1–5. [Google Scholar] [CrossRef]
- Lu, N.; Zhang, G.; Liu, F.; Zhou, T.; Bian, H. Vibration fault diagnosis method of hydroelectric units based on LTSA and spectral clustering. J. Wuhan Univ. Eng. Ed. 2021, 54, 1064–1069. [Google Scholar] [CrossRef]
- Huang, G.; Zhuang, X.; Xie, L.; Zeng, X. MEMS gyroscope denoising algorithm based on CEEMDAN-WP-SG. J. Electron. Meas. Instrum. 2022, 36, 106–113. [Google Scholar] [CrossRef]
- Xu, L.; Yang, J.; Zhou, L.; Long, B. Interference fiber joint denoising method based on PE-VMD and wavelet threshold. Foreign Electron. Meas. Technol. 2022, 41, 39–46. [Google Scholar] [CrossRef]
- Wang, W.; He, K.; Jin, Y.; Mo, F.; Zhao, X.; Pi, J.; Xiao, Z. Vibration signal feature extraction of hydroelectric units based on CEEMDAN sample entropy and PSO-SVM. J. Wuhan Univ. Eng. Ed. 2022, 55, 1167–1175. [Google Scholar] [CrossRef]
- Chen, Q.; Huang, N.; Riemenschneider, S.; Xu, Y. A B-spline approach for empirical mode decompositions. Adv. Comput. Math. 2006, 24, 171–195. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J.; Yang, H.; Wang, L. A new underwater acoustic signal denoising technique based on CEEMDAN, mutual information, permutation entropy, and wavelet threshold denoising. Entropy 2018, 20, 563. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2011, 1, 1–41. [Google Scholar] [CrossRef]
- Wang, Q.; Li, D. Analysis of Francis turbine vibration signal feature extraction based on EEMD. Renmin Chang. 2017, 48, 96–100. [Google Scholar] [CrossRef]
- Fu, X.; Yu, J.; Cui, X.; Dai, L.; Huang, J.; Ren, W. Comparative study on three empirical mode decomposition methods for vibration signal analysis of blasting. Eng. Blasting 2021, 27, 21–28. [Google Scholar] [CrossRef]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Xiao, S.; Chen, B.; Shen, D.; Chen, H. Application of improved VMD and threshold algorithm in partial discharge denoising. J. Electron. Meas. Instrum. 2021, 35, 206–214. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y.; Lu, C. Application of an improved variational mode decomposition algorithm in leakage location detection of water supply pipeline. Measurement 2021, 173, 108587. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the IEEE International Conference on Acoustics, Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar] [CrossRef]
- Cai, G.; Zhao, X.; Hu, X.; Huang, X.; Chen, H. Ball mill cylinder vibration signal denoising method based on CEEMDAN and wavelet threshold. Mech. Sci. Technol. 2020, 39, 1077–1085. [Google Scholar]
- Geng, D.; Wang, C.; Zhao, J.; Ning, Q.; Jiang, X. Research on denoising method of heart impulse signal based on CEEMDAN-PE. J. Instrum. Meas. 2019, 40, 155–161. [Google Scholar] [CrossRef]
- Zhao, Y.; Yan, S.; He, J.; Li, J.; Zou, X.; Qian, S. Joint denoising algorithm of HIFU echo signal based on ICEEMDAN combined with MMSVC and WT. J. Meas. Sci. Instrum. 2023, 14, 35–44. [Google Scholar]
- Zhai, Y.; Yang, X. Denoising algorithm for welding signal based on ICEEMDAN-ICA. Therm. Manuf. Process. 2022, 51, 96–102+106. [Google Scholar] [CrossRef]
- Li, C.; Yang, J.; Lian, H.; Zheng, D.; Lai, Y.; Liu, H. Combined prediction method of silicone oil dissolved gas concentration based on ICEEMDAN-IPSO-ELM. High Volt. Eng. 2023, 1–12. [Google Scholar] [CrossRef]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved complete ensemble EMD: A suitable tool for biomedical signal processing. Biomed. Signal Process. Control 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Zhao, X.; Chang, X.; Li, M. Short-term wind speed prediction method based on hybrid multi-step decomposition with ICEEMDAN-PE/FE-IGWO-SVR. Mod. Electron. Tech. 2023, 46, 124–130. [Google Scholar] [CrossRef]
- Lei, B.; Yi, P.; Xiang, J.; Xu, W. A SVD-based signal denoising method with fitting threshold for EMAT. IEEE Access 2021, 9, 21123–21131. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Z.; Huang, J.; Cheng, M.; Li, H. Study on Vibration-Transmission-Path Identification Method for Hydropower Houses Based on CEEMDAN-SVD-TE. Appl. Sci. 2022, 12, 7455. [Google Scholar] [CrossRef]
- Li, C.; Peng, T.; Zhu, Y.; Lu, S. Noise reduction method of shearer’s cutting sound signal under strong background noise. Meas. Control. 2022, 55, 783–794. [Google Scholar] [CrossRef]
- Wang, J.; Li, J.; Liu, Y. An improved method for determining the effective rank order of singular value decomposition denoising. J. Vib. Shock. 2014, 33, 176–180. [Google Scholar] [CrossRef]
- Li, H.; Chu, L.; Liu, Q.; Lu, J.; Li, F. Signal denoising method based on SG-VMD-SVD. J. Jilin Univ. Inf. Sci. Ed. 2021, 39, 158–165. [Google Scholar] [CrossRef]
- Ren, Y.; Liu, P.; Hu, L.; Huang, J.; Qiao, R.; Chen, H.; Li, X.; Huang, S. Research on noise reduction method of pressure pulsation signal of draft tube of hydropower unit based on ALIF-SVD. Shock. Vib. 2021, 2021, 5580319. [Google Scholar] [CrossRef]
- Li, H.; Liu, T.; Wu, X.; Li, S. Application of relative singular value ratio SVD in bearing fault diagnosis. J. Mech. Eng. 2021, 57, 138–149. [Google Scholar] [CrossRef]
- Liu, D.; Wang, X.; Huang, J.; Peng, L.; Xiao, Z. Research on vibration signal denoising method of hydropower units based on SVD. Hydropower New Energy 2018, 32, 38–43. [Google Scholar] [CrossRef]
- Li, C. Research on Data-Driven Cutting Mode Recognition Method for Shearer Sound Signal. Master’s Thesis, Anhui University of Science and Technology, Huainan, China, 2022. [Google Scholar] [CrossRef]
- Zhao, W. Research on Denoising Algorithm for Dual-Domain Gas Signal Based on CEEMDAN Fusion SVD Ratio Method. Master’s Thesis, Shandong University of Science and Technology, Qingdao, China, 2019. [Google Scholar] [CrossRef]
- Zhang, J.; Hou, G.; Bao, Z.; Zhang, Y.; Ma, Y. Vibration signal denoising method of spillway structure based on CEEMDAN and SVD. J. Vib. Shock. 2017, 36, 138–143. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Y.; Li, X.; Luo, H.; Yin, S.; Kaynak, O. Remaining useful life prediction of lithium-ion battery with adaptive noise estimation and capacity regeneration detection. IEEE/ASME Trans. Mechatron. 2022, 28, 632–643. [Google Scholar] [CrossRef]
- Chang, Y.; Yang, Z.; Pan, F.; Tang, Y.; Huang, W. Ultra-short-term wind power prediction method based on CEEMDAN-PE-WPD and multi-objective optimization. Power Syst. Technol. 2022. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, K.; An, Y.; Luo, H.; Yin, S. An integrated multitasking intelligent bearing fault diagnosis scheme based on representation learning under imbalanced sample condition. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Bai, L.; Han, Z.; Ren, J. Application of CEEMDAN-PE-TFPF denoising method in gear fault diagnosis. Mach. Des. Manuf. 2020, 1, 80–83+88. [Google Scholar] [CrossRef]
- Zheng, J.; Bian, J. Rolling bearing fault diagnosis method based on integrated CEEMDAN-SVD and inverse frequency spectrum. J. Taiyuan Univ. Technol. 2021, 52, 495–501. [Google Scholar] [CrossRef]
- Gu, Y.; Zeng, L.; Zhang, M.; Li, W. Feature extraction of localized faults in gearbox based on CEEMDAN-SQI-SVD. Chin. J. Sci. Instrum. 2019, 40, 78–88. [Google Scholar] [CrossRef]
- Jiang, F.; Lu, J.; Liu, M.; Feng, Y. Rolling bearing fault diagnosis based on CEEMDAN and CNN-LSTM. Electron. Meas. Technol. 2023, 46, 72–77. [Google Scholar] [CrossRef]
- Feng, F.; Rao, G.; Si, A.; Wu, G. Research on permutation entropy algorithm and its application in vibration signal mutation detection. J. Vib. Eng. 2012, 25, 221–224. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Zhang, S.; Li, Y. Application of multi-resolution singular value decomposition in demodulation analysis of rolling bearing vibration signal. J. Vib. Eng. 2019, 32, 1114–1120. [Google Scholar] [CrossRef]
- Su, Y.; Wang, X.; Jin, X. Analysis of subway shunting test noise based on SVD differential spectrum denoising method. China Meas. 2019, 45, 42–45+65. [Google Scholar] [CrossRef]
- Liu, Y.; He, S.; Yang, Q.; Gao, B.; Liu, P.; Lei, Y. A new pendulum signal denoising method and its application. J. Vib. Test Diagn. 2019, 39, 1053–1060+1136. [Google Scholar] [CrossRef]



















| IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 | IMF9 | IMF10 | R |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.9375 | 0.7752 | 0.5679 | 0.4093 | 0.309 | 0.212 | 0.1362 | 0.1489 | 0.1498 | 0.1436 | 0.0019 |
| Denoising Method | SNR/dB | RMSE | MAE |
|---|---|---|---|
| Wavelet Threshold | 35.1071 | 0.2578 | 0.2027 |
| SVD | 37.4152 | 0.1976 | 0.1424 |
| CEEMDAN–PE | 33.1070 | 0.3245 | 0.2504 |
| ICEEMDAN–PE | 37.7179 | 0.1908 | 0.1390 |
| ICEEMDAN–PE–SVD | 42.0941 | 0.1152 | 0.0909 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Guo, J.; Yuan, F.; Shi, Y.; Li, Z. Research on Denoising Method for Hydroelectric Unit Vibration Signal Based on ICEEMDAN–PE–SVD. Sensors 2023, 23, 6368. https://doi.org/10.3390/s23146368
Zhang F, Guo J, Yuan F, Shi Y, Li Z. Research on Denoising Method for Hydroelectric Unit Vibration Signal Based on ICEEMDAN–PE–SVD. Sensors. 2023; 23(14):6368. https://doi.org/10.3390/s23146368
Chicago/Turabian StyleZhang, Fangqing, Jiang Guo, Fang Yuan, Yongjie Shi, and Zhaoyang Li. 2023. "Research on Denoising Method for Hydroelectric Unit Vibration Signal Based on ICEEMDAN–PE–SVD" Sensors 23, no. 14: 6368. https://doi.org/10.3390/s23146368
APA StyleZhang, F., Guo, J., Yuan, F., Shi, Y., & Li, Z. (2023). Research on Denoising Method for Hydroelectric Unit Vibration Signal Based on ICEEMDAN–PE–SVD. Sensors, 23(14), 6368. https://doi.org/10.3390/s23146368