
Time-Lapse 3D CSEM for Reservoir Monitoring Based on Rock Physics Simulation of the Wisting Oil Field Offshore Norway

Abstract
:
1. Introduction
2. Method
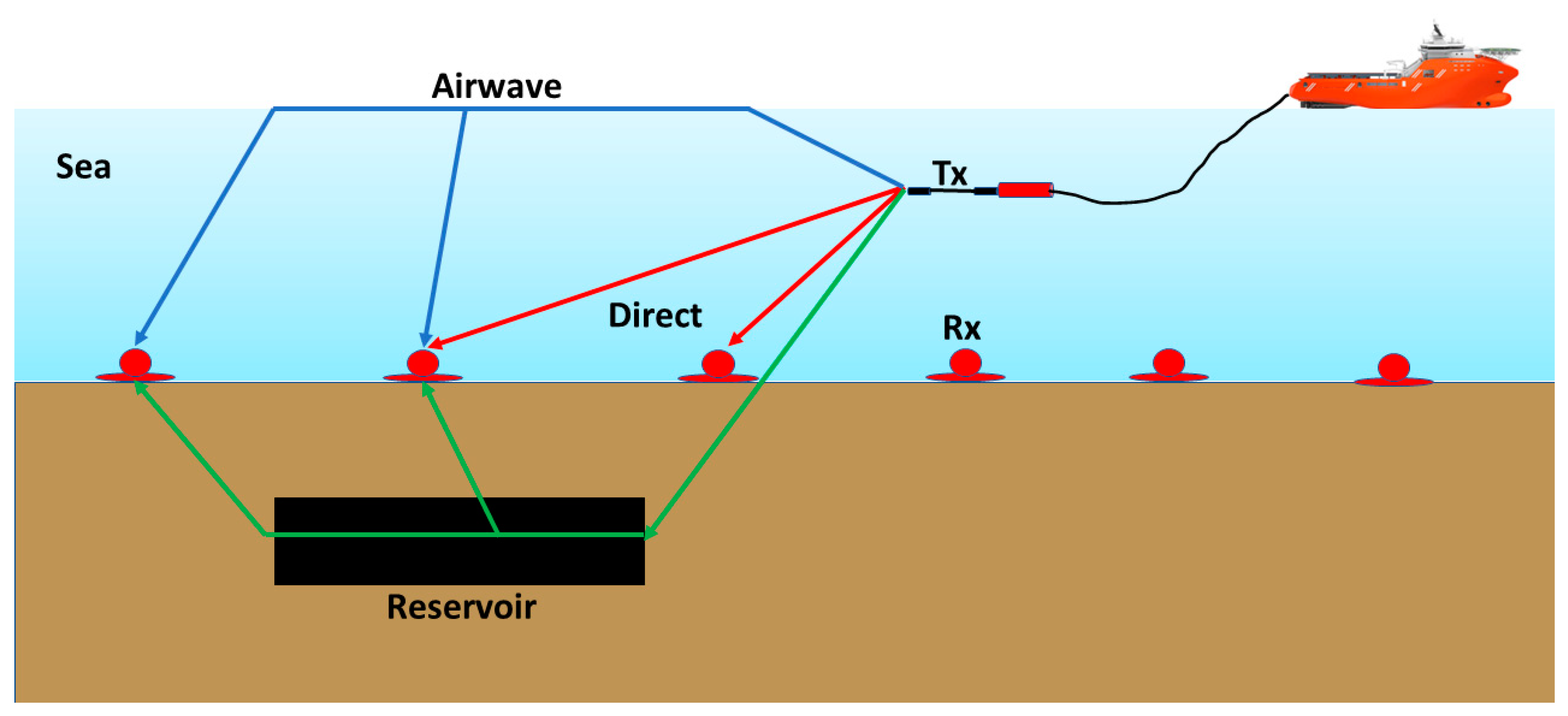
2.1. The Marine CSEM Method
2.2. Anomalous Transverse Resistance
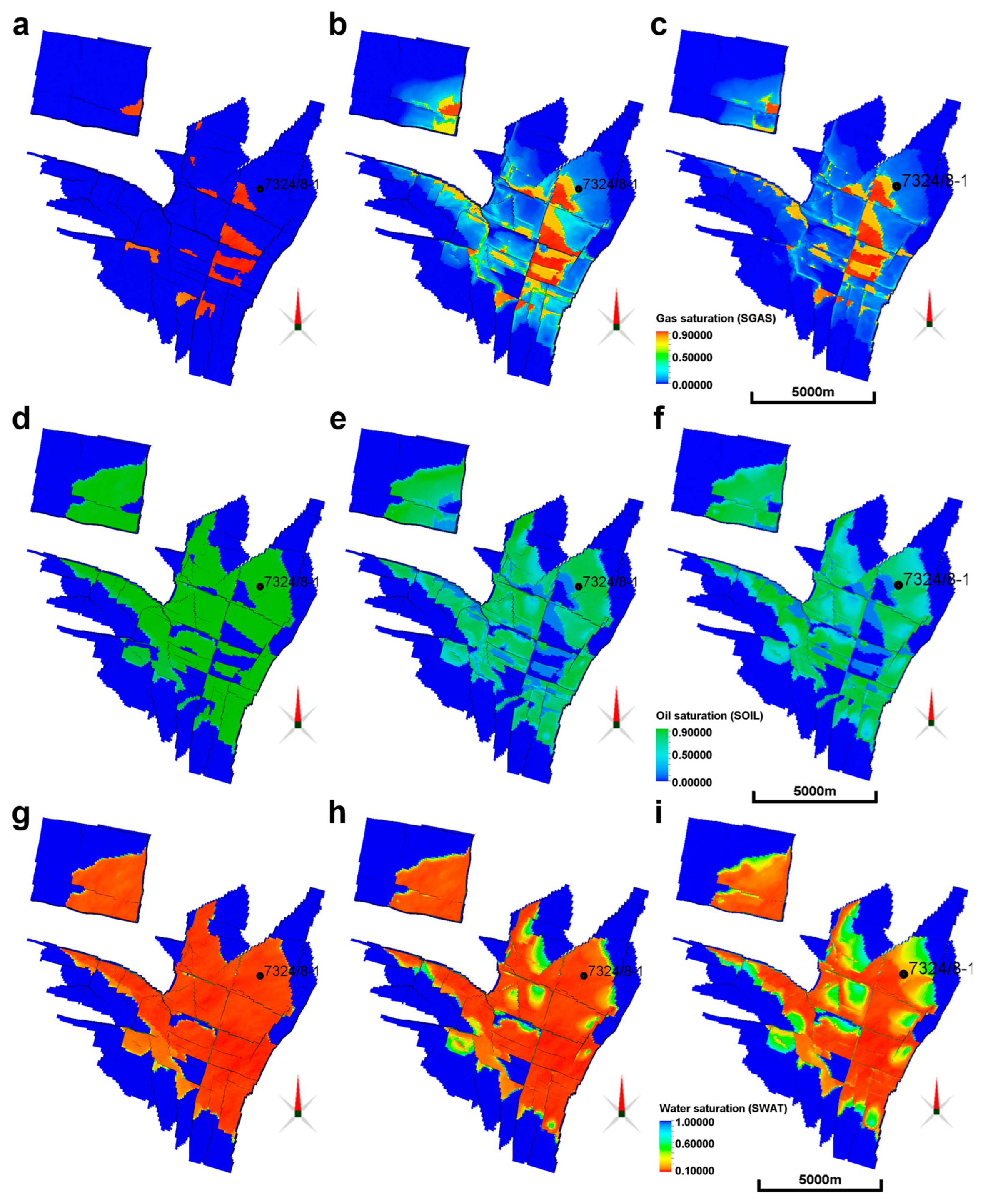
3. Resistivity Model Construction
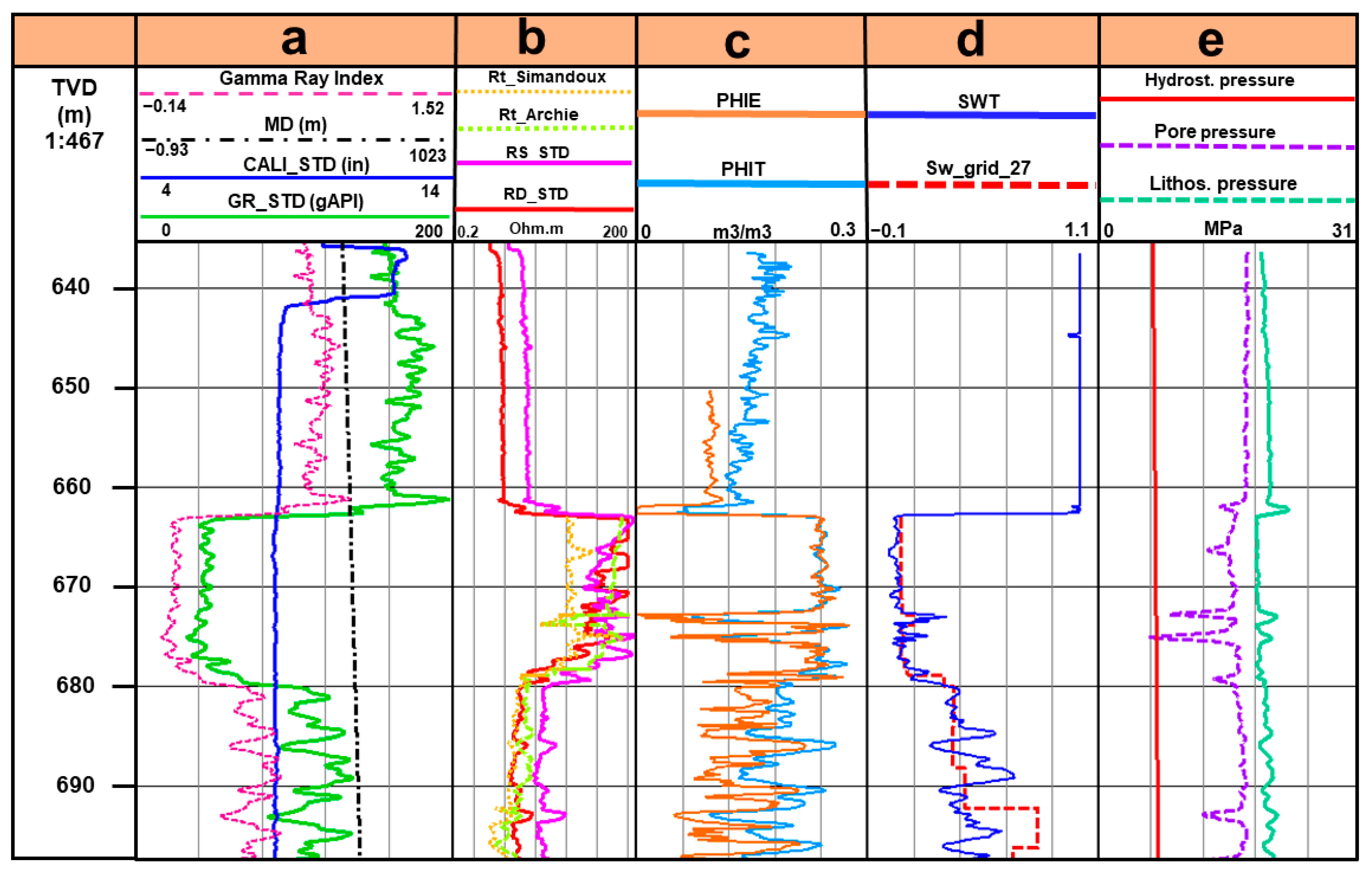
3.1. Petrophysical Model Selection
3.2. Petrophysical Parameter Selection
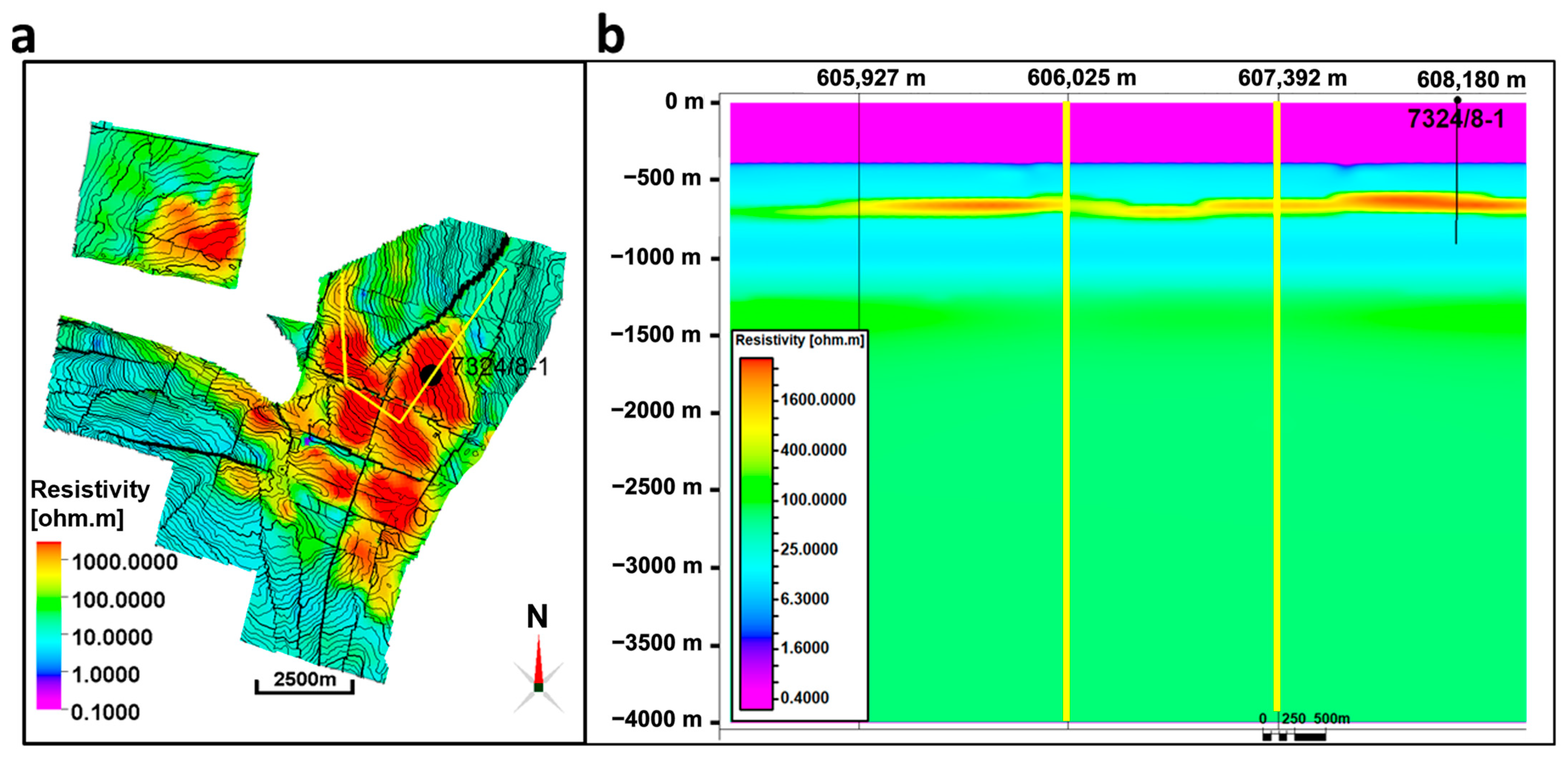
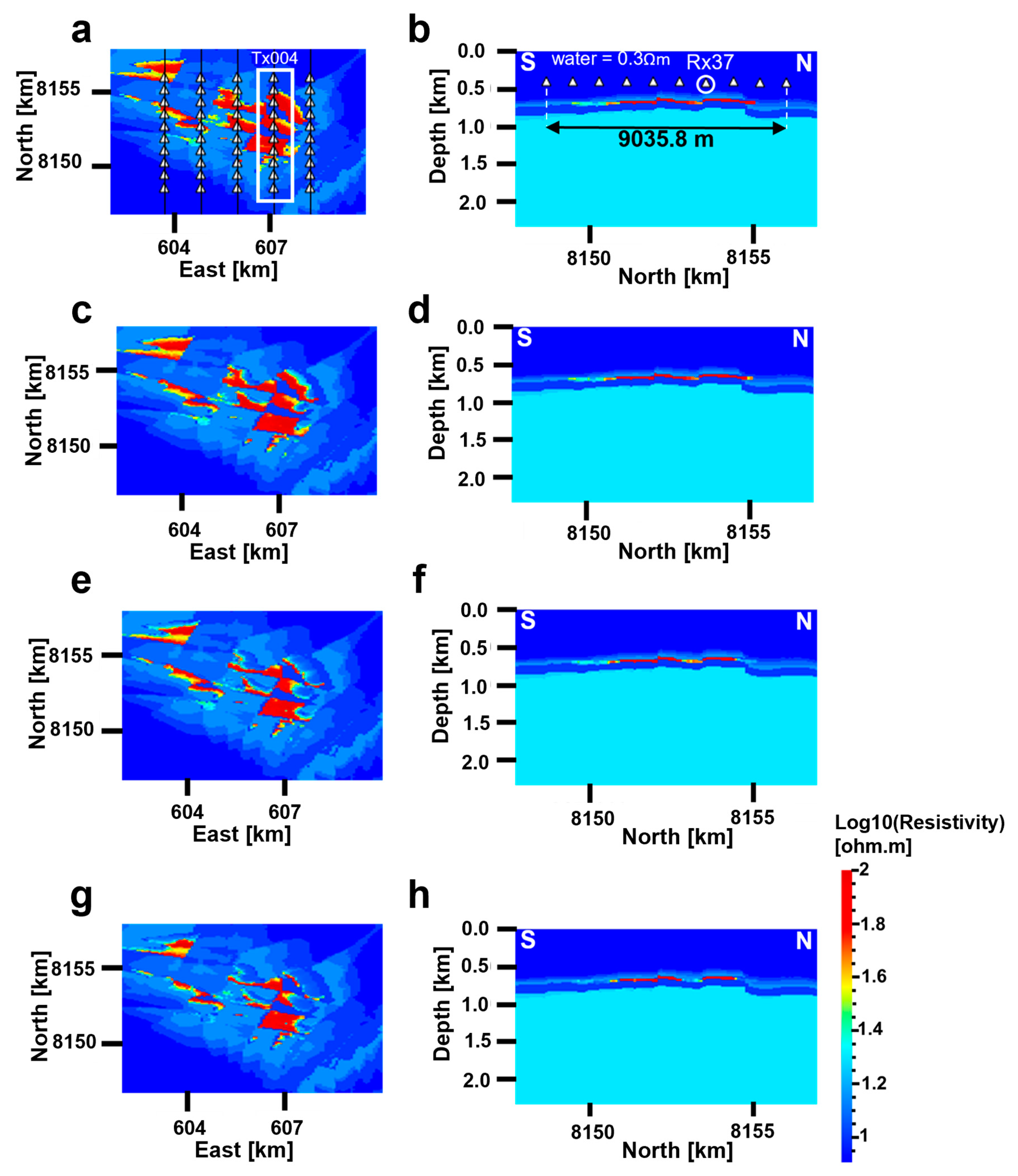
3.3. Constructed Resistivity Models
4. Time-Lapse CSEM Data Modeling
4.1. Acquisition Settings
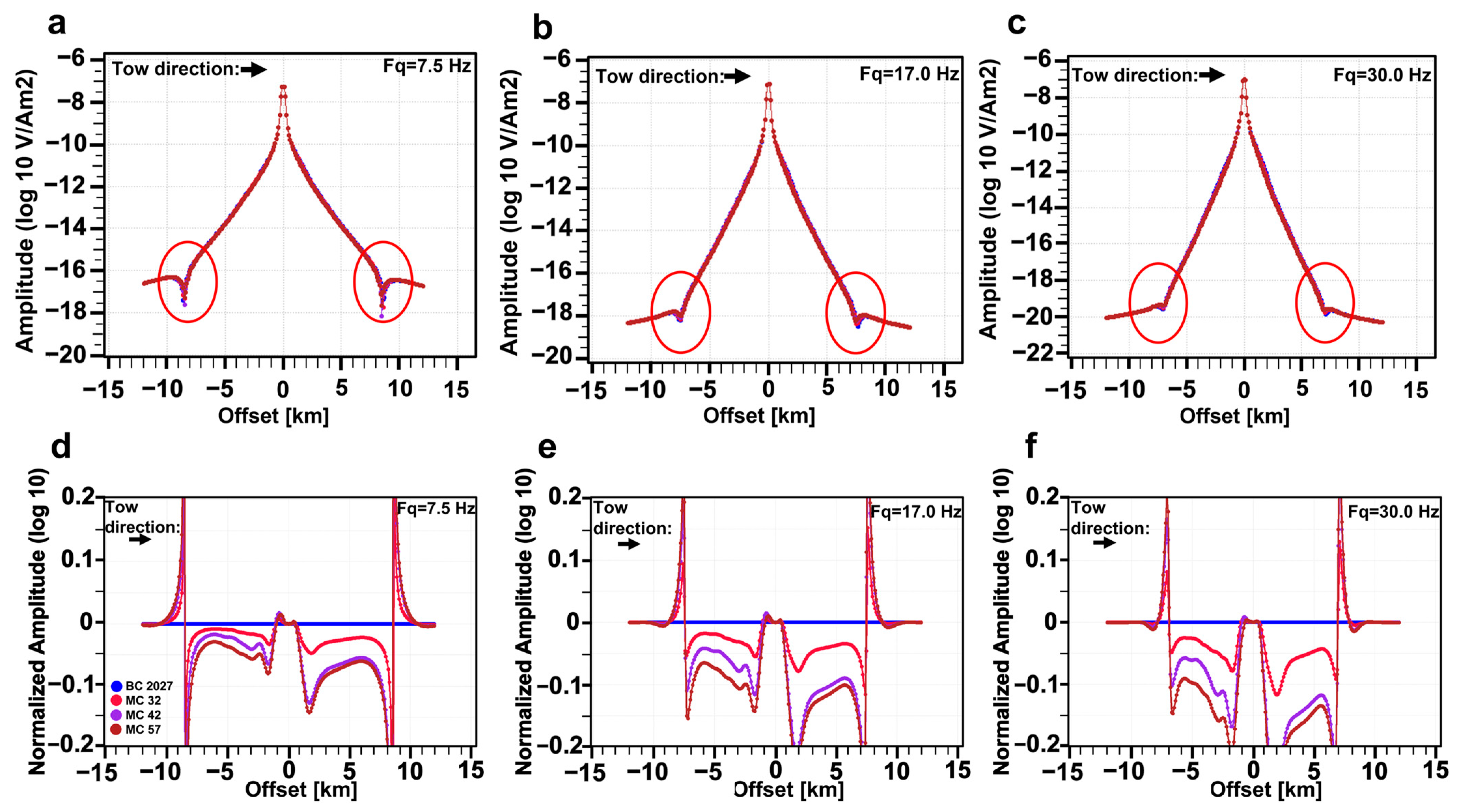
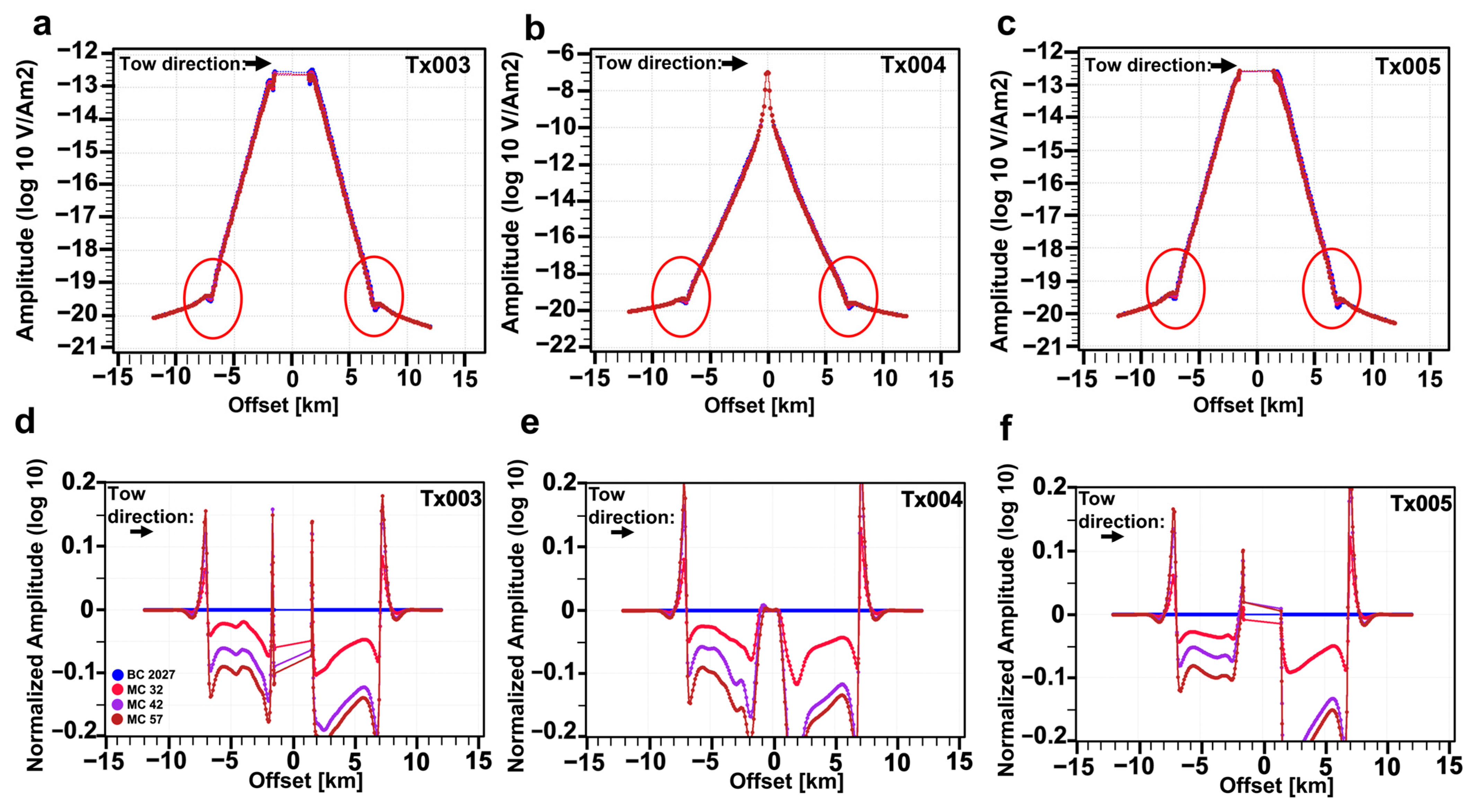
4.2. CSEM Data Modeling and Time-Lapse Production-Induced Responses
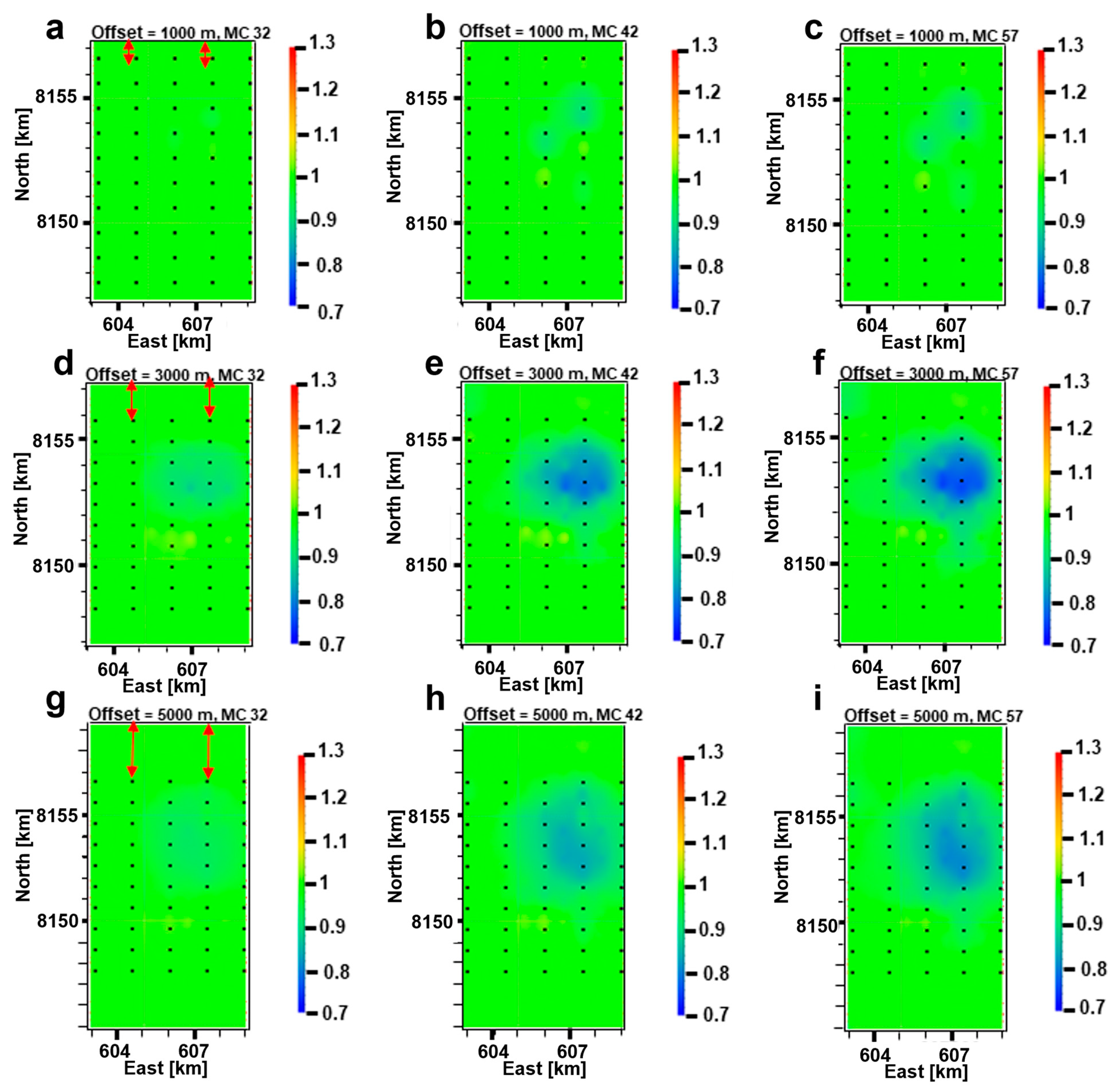
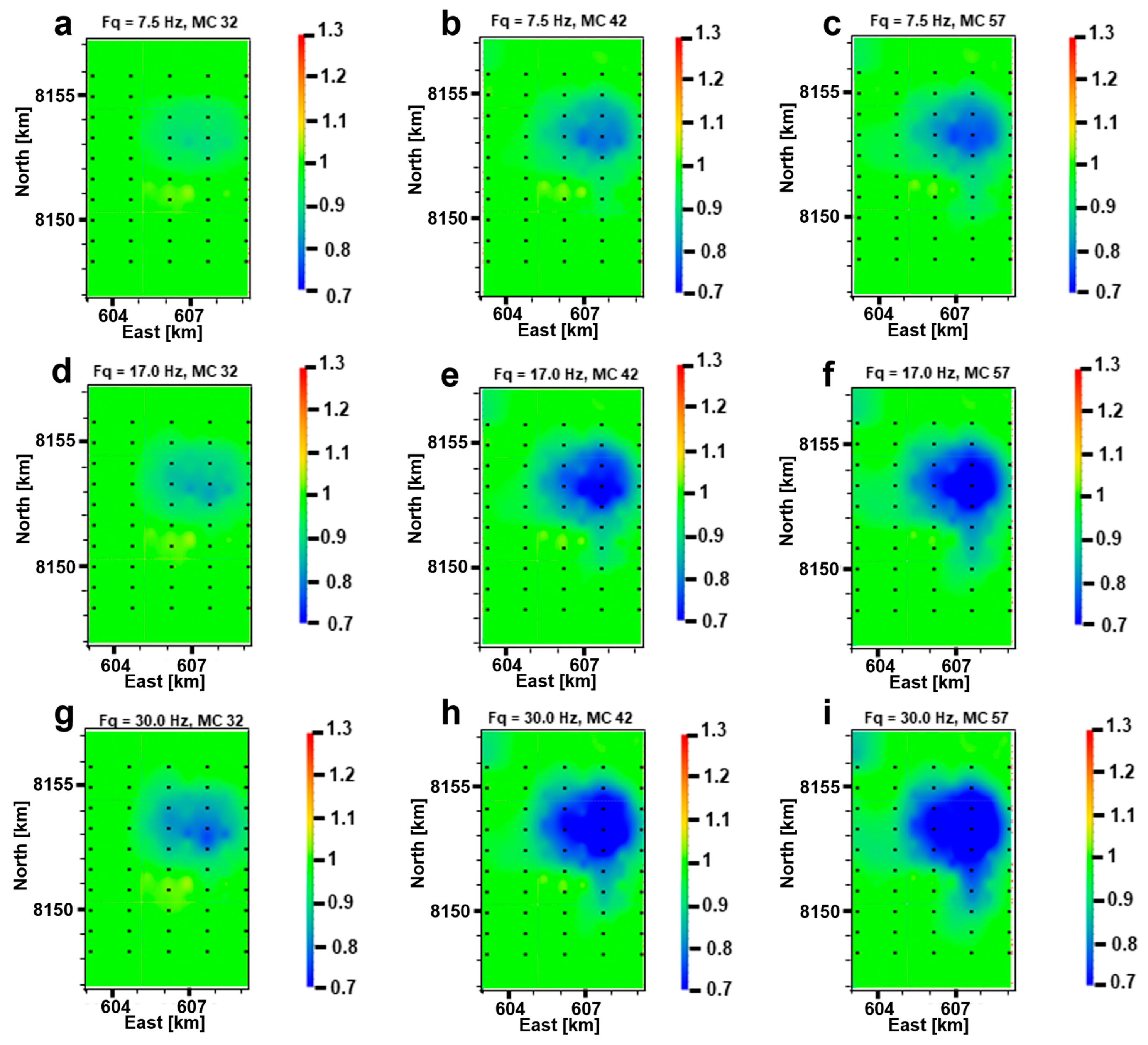
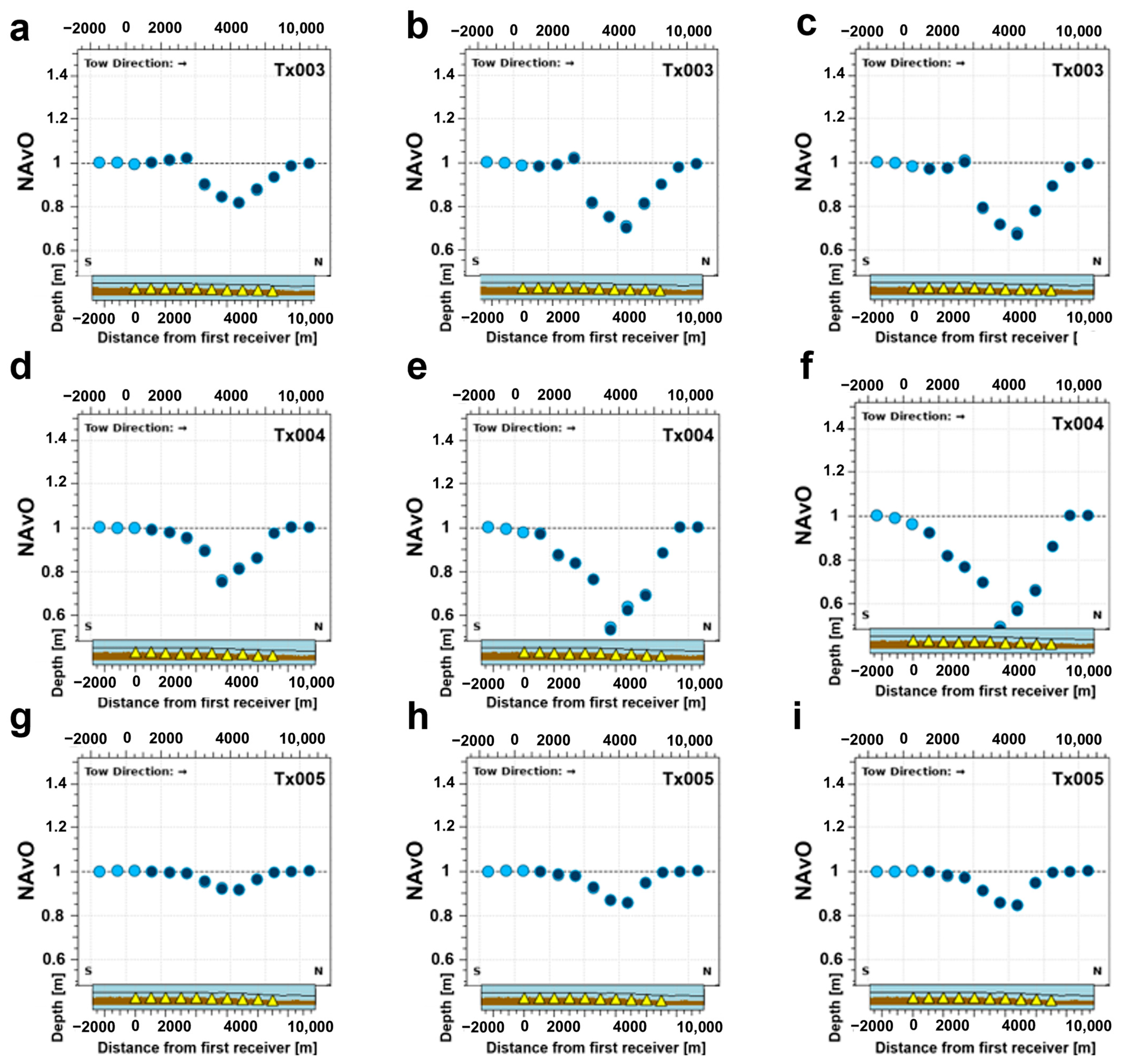
4.3. Attribute Analysis of the Modeled CSEM Responses
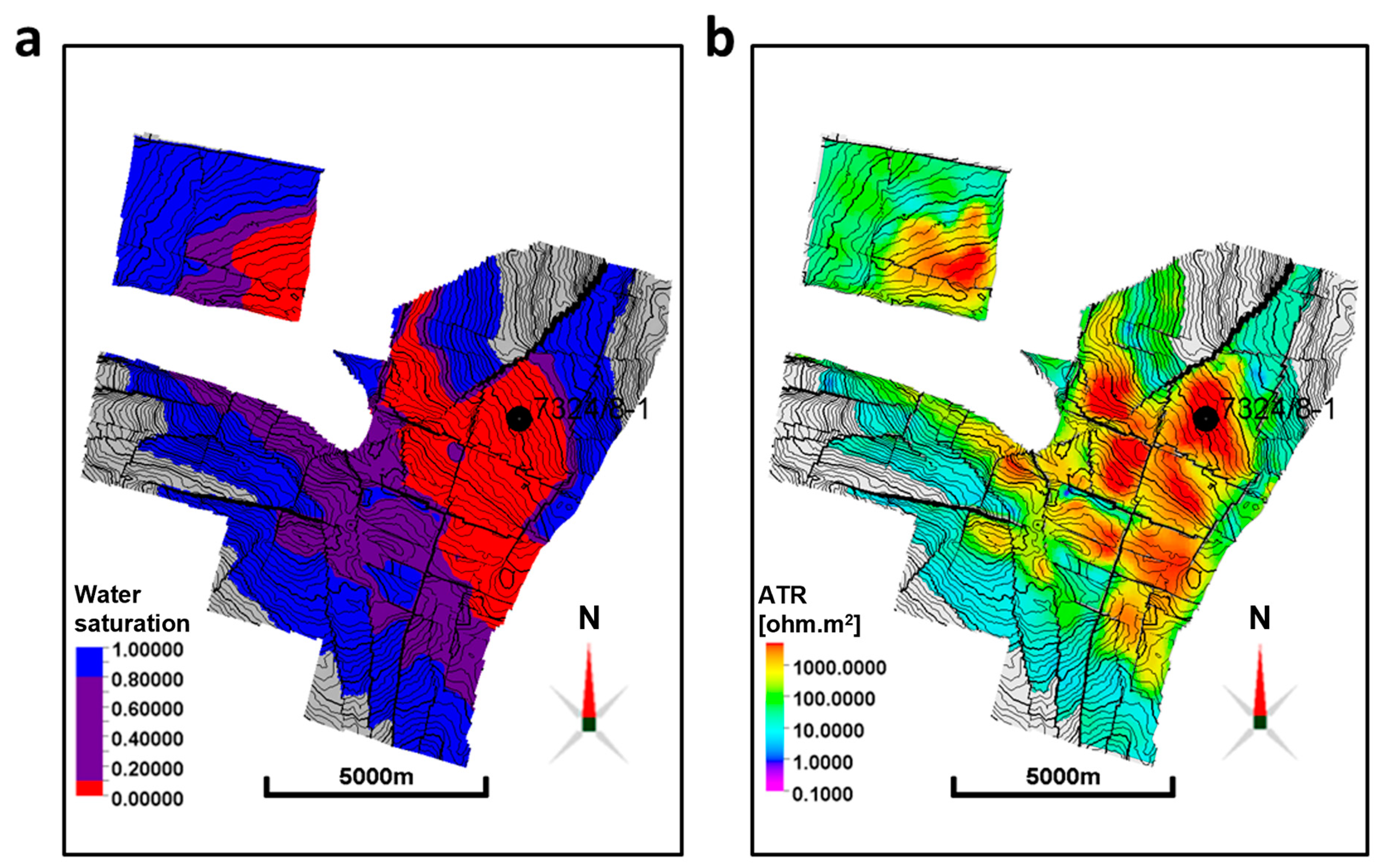
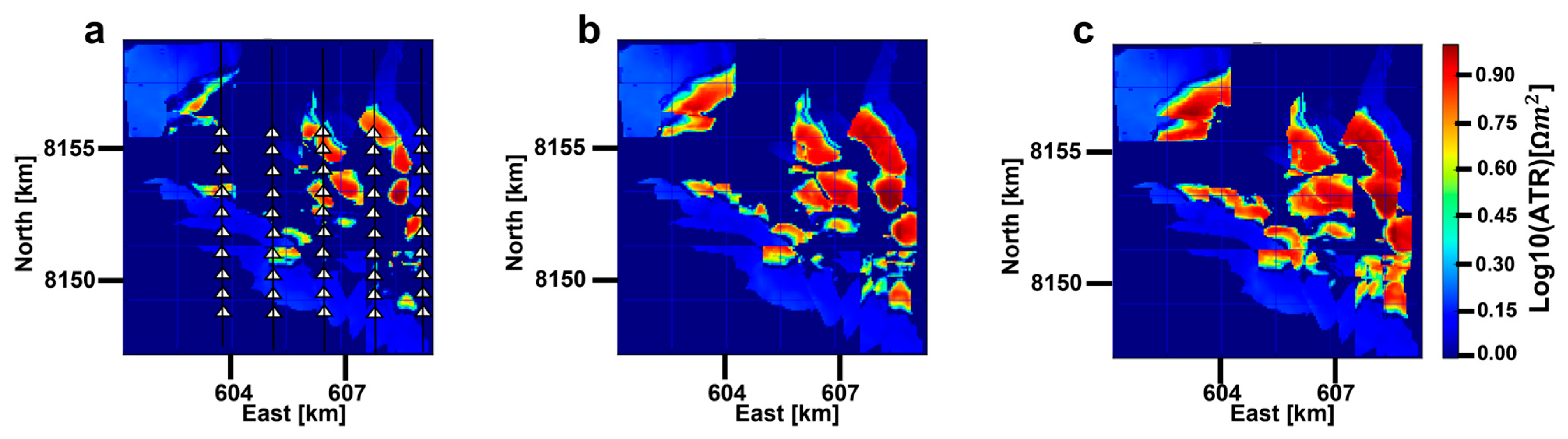
4.4. ATR Maps of Resistivity Models
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Constable, S. Ten Years of Marine CSEM for Hydrocarbon Exploration. Geophysics 2010, 75, 75A67–75A81. [Google Scholar] [CrossRef]
- Li, Y.; Slob, E.; Werthmüller, D.; Wang, L.; Lu, H. An Introduction to the Application of Marine Controlled-Source Electromagnetic Methods for Natural Gas Hydrate Exploration. J. Mar. Sci. Eng. 2023, 11, 34. [Google Scholar] [CrossRef]
- Alcocer, J.E.; García, M.V.; Soto, H.S.; Baltar, D.; Paramo, V.R.; Gabrielsen, P.T.; Roth, F. Reducing Uncertainty by Integrating 3D CSEM in the Mexican Deep-Water Exploration Workflow. First Break 2013, 31. [Google Scholar] [CrossRef]
- Løseth, L.O.; Wiik, T.; Olsen, P.A.; Hansen, J.O. Detecting Skrugard by CSEM—Prewell Prediction and Postwell Evaluation. Interpretation 2014, 2, SH67–SH77. [Google Scholar] [CrossRef]
- Panzner, M.; Morten, J.P.; Weibull, W.W.; Arntsen, B. Integrated Seismic and Electromagnetic Model Building Applied to Improve Subbasalt Depth Imaging in the Faroe-Shetland Basin. Geophysics 2016, 81, E57–E68. [Google Scholar] [CrossRef]
- Zerilli, A.; Buonora, M.P.; Menezes, P.T.; Labruzzo, T.; Marçal, A.J.; Silva Crepaldi, J.L. Broadband Marine Controlled-Source Electromagnetic for Subsalt and around Salt Exploration. Interpretation 2016, 4, T521–T531. [Google Scholar] [CrossRef]
- Gustafson, C.; Key, K.; Evans, R.L. Aquifer Systems Extending Far Offshore on the US Atlantic Margin. Sci. Rep. 2019, 9, 8709. [Google Scholar] [CrossRef]
- Ishizu, K.; Ogawa, Y. Offshore-Onshore Resistivity Imaging of Freshwater Using a Controlled-Source Electromagnetic Method: A Feasibility Study. Geophysics 2021, 86, E391–E405. [Google Scholar] [CrossRef]
- Young, P.D.; Cox, C.S. Electromagnetic Active Source Sounding near the East Pacific Rise. Geophys. Res. Lett. 1981, 8, 1043–1046. [Google Scholar] [CrossRef]
- Constable, S.; Srnka, L.J. An Introduction to Marine Controlled-Source Electromagnetic Methods for Hydrocarbon Exploration. Geophysics 2007, 72, WA3–WA12. [Google Scholar] [CrossRef]
- Johansen, S.E.; Panzner, M.; Mittet, R.; Amundsen, H.E.; Lim, A.; Vik, E.; Landrø, M.; Arntsen, B. Deep Electrical Imaging of the Ultraslow-Spreading Mohns Ridge. Nature 2019, 567, 379–383. [Google Scholar] [CrossRef]
- Zach, J.J.; Frenkel, M.A.; Ridyard, D.; Hincapie, J.; Dubois, B.; Morten, J.P. Marine CSEM Time? Lapse Repeatability for Hydrocarbon Field Monitoring. In SEG Technical Program Expanded Abstracts 2009; SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 2009; pp. 820–824. [Google Scholar]
- Shantsev, D.V.; Nerland, E.A.; Gelius, L.-J. Time-Lapse CSEM: How Important Is Survey Repeatability? Geophys. J. Int. 2020, 223, 2133–2147. [Google Scholar] [CrossRef]
- Menezes, P.T.; Correa, J.L.; Alvim, L.M.; Viana, A.R.; Sansonowski, R.C. Time-Lapse CSEM Monitoring: Correlating the Anomalous Transverse Resistance with SoPhiH Maps. Energies 2021, 14, 7159. [Google Scholar] [CrossRef]
- Park, J.; Sauvin, G.; Vöge, M. 2.5 D Inversion and Joint Interpretation of CSEM Data at Sleipner CO2 Storage. Energy Procedia 2017, 114, 3989–3996. [Google Scholar] [CrossRef]
- Morten, J.P.; Bjørke, A. Imaging and Quantifying CO2 Containment Storage Loss Using 3D CSEM. In Proceedings of the EAGE 2020 Annual Conference & Exhibition Online, Online, 8–11 December 2020; European Association of Geoscientists & Engineers: Utrecht, The Netherlands, 2020; Volume 2020, pp. 1–5. [Google Scholar]
- Landrø, M. Discrimination between Pressure and Fluid Saturation Changes from Time-Lapse Seismic Data. Geophysics 2001, 66, 836–844. [Google Scholar] [CrossRef]
- Wang, Z.; Gelius, L.-J. Electric and Elastic Properties of Rock Samples: A Unified Measurement Approach. Pet. Geosci. 2010, 16, 171–183. [Google Scholar] [CrossRef]
- Salako, O.; MacBeth, C.; MacGregor, L. Potential Applications of Time-Lapse CSEM to Reservoir Monitoring. First Break 2015, 33. [Google Scholar] [CrossRef]
- Orange, A.; Key, K.; Constable, S. The Feasibility of Reservoir Monitoring Using Time-Lapse Marine CSEM. Geophysics 2009, 74, F21–F29. [Google Scholar] [CrossRef]
- Ayani, M.; Grana, D.; Liu, M. Stochastic Inversion Method of Time-Lapse Controlled Source Electromagnetic Data for CO2 Plume Monitoring. Int. J. Greenh. Gas Control 2020, 100, 103098. [Google Scholar] [CrossRef]
- Ziolkowski, A.; Parr, R.; Wright, D.; Nockles, V.; Limond, C.; Morris, E.; Linfoot, J. Multi-transient Electromagnetic Repeatability Experiment over the North Sea Harding Field. Geophys. Prospect. 2010, 58, 1159–1176. [Google Scholar] [CrossRef]
- Black, N.; Wilson, G.A.; Gribenko, A.V.; Zhdanov, M.S.; Morris, E. 3D Inversion of Time-Lapse CSEM Data Based on Dynamic Reservoir Simulations of the Harding Field, North Sea. In Proceedings of the 2011 SEG Annual Meeting, San Antonio, TX, USA, 18–23 September 2011; OnePetro: Richardson, TX, USA, 2011. [Google Scholar]
- Lien, M.; Mannseth, T. Sensitivity Study of Marine CSEM Data for Reservoir Production Monitoring. Geophysics 2008, 73, F151–F163. [Google Scholar] [CrossRef]
- Black, N.; Zhdanov, M.S. Monitoring of Hydrocarbon Reservoirs Using Marine CSEM Method. In Proceedings of the SEG International Exposition and Annual Meeting, Houston, TX, USA, 25–30 October 2009; SEG: Houston, TX, USA, 2009; p. SEG-2009-0850. [Google Scholar]
- Strack, K.; Adams, D.C.; Barajas-Olalde, C.; Davydycheva, S.; Klapperich, R.J.; Martinez, Y.; MacLennan, K.; Yadi Paembonan, A.; Peck, W.D.; Smirnov, M. CSEM Fluid Monitoring Methodology Using Real Data Examples. In Proceedings of the SEG International Exposition and Annual Meeting, Houston, TX, USA, 28 August–September 1 2022; SEG: Houston, TX, USA, 2022; p. SEG-2022-3751658. [Google Scholar]
- Wellbore: 7324/8-1-Factpages-NPD. Available online: https://factpages.npd.no/en/wellbore/pageview/exploration/all/7221 (accessed on 16 November 2022).
- Alvarez, P.; Alvarez, A.; MacGregor, L.; Bolivar, F.; Keirstead, R.; Martin, T. Reservoir Properties Prediction Integrating Controlled-Source Electromagnetic, Prestack Seismic, and Well-Log Data Using a Rock-Physics Framework: Case Study in the Hoop Area, Barents Sea, Norway. Interpretation 2017, 5, SE43–SE60. [Google Scholar] [CrossRef]
- Granli, J.R.; Veire, H.H.; Gabrielsen, P.; Morten, J.P. Maturing Broadband 3D CSEM for Improved Reservoir Property Prediction in the Realgrunnen Group at Wisting, Barents Sea. In Proceedings of the 2017 SEG International Exposition and Annual Meeting, Houston, TX, USA, 24 September 2017; SEG: Houston, TX, USA, 2017; p. SEG-2017-17727091. [Google Scholar]
- Stueland, E. Wisting–Shallow Reservoir Possibilites and Challenges FORCE Underexplored Plays II; OMV (Norge) AS: Stavanger, Norway, 2016. [Google Scholar]
- Werthmüller, D.; Rochlitz, R.; Castillo-Reyes, O.; Heagy, L. Towards an Open-Source Landscape for 3-D CSEM Modelling. Geophys. J. Int. 2021, 227, 644–659. [Google Scholar] [CrossRef]
- Ellingsrud, S.; Eidesmo, T.; Johansen, S.; Sinha, M.C.; MacGregor, L.M.; Constable, S. Remote Sensing of Hydrocarbon Layers by Seabed Logging (SBL): Results from a Cruise Offshore Angola. Lead. Edge 2002, 21, 972–982. [Google Scholar] [CrossRef]
- Gabrielsen, P.T.; Abrahamson, P.; Panzner, M.; Fanavoll, S.; Ellingsrud, S. Exploring Frontier Areas Using 2D Seismic and 3D CSEM Data, as Exemplified by Multi-Client Data over the Skrugard and Havis Discoveries in the Barents Sea. First Break 2013, 31. [Google Scholar] [CrossRef]
- Archie, G.E. The Electrical Resistivity Log as an Aid in Determining Some Reservoir Characteristics. Trans. AIME 1942, 146, 54–62. [Google Scholar] [CrossRef]
- Glover, P.W. A Generalized Archie’s Law for n Phases. Geophysics 2010, 75, E247–E265. [Google Scholar] [CrossRef]
- Mungan, N.; Moore, E.J. Certain Wettability Effects on Electrical Resistivity in Porous Media. J. Can. Pet. Technol. 1968, 7, 20–25. [Google Scholar] [CrossRef]
- Simandoux, P. Dielectric Measurements on Porous Media, Application to the Measurements of Water Saturation: Study of Behavior of Argillaceous Formations. Rev. Inst. Fr. Pétrole 1963, 18, 193–215. [Google Scholar]
- Meunier, K.H. Reservoir Characterization of the Realgrunnen Subgroup in Wisting Central III (7324/8-3), SW Barents Sea. Master’s Thesis, University of Oslo, Oslo, Norway, 2019. [Google Scholar]
- Alvarez, P.; Marcy, F.; Vrijlandt, M.; Skinnemoen, Ø.; MacGregor, L.; Nichols, K.; Keirstead, R.; Bolivar, F.; Bouchrara, S.; Smith, M. Multiphysics Characterization of Reservoir Prospects in the Hoop Area of the Barents Sea. Interpretation 2018, 6, SG1–SG17. [Google Scholar] [CrossRef]
- Adisoemarta, P.S.; Anderson, G.A.; Frailey, S.M.; Asquith, G.B. Saturation Exponent n in Well Log Interpretation: Another Look at the Permissible Range. In Proceedings of the SPE Permian Basin Oil and Gas Recovery Conference, Midland, TX, USA, 15 May 2001; SEG: Houston, TX, USA, 2001; p. SPE-70043-MS. [Google Scholar]
- Anderson, W.G. Wettability Literature Survey-Part 3: The Effects of Wettability on the Electrical Properties of Porous Media. J. Pet. Technol. 1986, 38, 1371–1378. [Google Scholar] [CrossRef]
- Kearey, P.; Brooks, M.; Hill, I. An Introduction to Geophysical Exploration; John Wiley & Sons: Hoboken, NJ, USA, 2002; Volume 4. [Google Scholar]
- Corseri, R.; Planke, S.; Faleide, J.I.; Senger, K.; Gelius, L.J.; Johansen, S.E. Opportunistic Magnetotelluric Transects from CSEM Surveys in the Barents Sea. Geophys. J. Int. 2021, 227, 1832–1845. [Google Scholar] [CrossRef]
- Menezes, P.T.; Ferreira, S.M.; Correa, J.L.; Menor, E.N. Twenty Years of CSEM Exploration in the Brazilian Continental Margin. Minerals 2023, 13, 870. [Google Scholar] [CrossRef]
- Maaø, F.A. Fast Finite-Difference Time-Domain Modeling for Marine-Subsurface Electromagnetic Problems. Geophysics 2007, 72, A19–A23. [Google Scholar] [CrossRef]
- Constable, S.; Weiss, C.J. Mapping Thin Resistors and Hydrocarbons with Marine EM Methods: Insights from 1D Modeling. Geophysics 2006, 71, G43–G51. [Google Scholar] [CrossRef]
- Thorkildsen, V.S.; Gelius, L.-J. Electromagnetic Resolution—A CSEM Study Based on the Wisting Oil Field. Geophys. J. Int. 2023, 233, 2124–2141. [Google Scholar] [CrossRef]
- Landrø, M.; Amundsen, L. Introduction to Exploration Geophysics with Recent Advances; Bivrost: Trondheim, Norway, 2018; ISBN 82-303-3763-2. [Google Scholar]
- Price, A.; Mikkelsen, G.; Hamilton, M. 3D CSEM over Frigg-Dealing with Cultural Noise. In Proceedings of the 2010 SEG Annual Meeting, Denver, CO, USA, 17–22 October 2010; OnePetro: Richardson, TX, USA, 2010. [Google Scholar]
- Morten, J.P.; Berre, L.; de Ryhove, S.d.l.K.; Markhus, V. 3D CSEM Inversion of Data Affected by Infrastructure. In Proceedings of the 79th EAGE Conference and Exhibition, Paris, France, 12–15 June 2017; European Association of Geoscientists & Engineers: Utrecht, The Netherlands, 2017; Volume 2017, pp. 1–5. [Google Scholar]
- Orujov, G.; Anderson, E.; Streich, R.; Swidinsky, A. On the Electromagnetic Response of Complex Pipeline Infrastructure. Geophysics 2020, 85, E241–E251. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| a is an empirical constant | 1 |
| Well | Wisting central well (7324/8-1) |
| Cementation exponent (m) | 2 |
| Saturation exponent (n) | Non-linear ranging between 2.1 and 2.5 |
| Formation water resistivity (Rw) | 0.18 ohm-m |
| Water saturation cut-off | 10% |
| Gas saturation cut-off | 70% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ettayebi, M.; Wang, S.; Landrø, M. Time-Lapse 3D CSEM for Reservoir Monitoring Based on Rock Physics Simulation of the Wisting Oil Field Offshore Norway. Sensors 2023, 23, 7197. https://doi.org/10.3390/s23167197
Ettayebi M, Wang S, Landrø M. Time-Lapse 3D CSEM for Reservoir Monitoring Based on Rock Physics Simulation of the Wisting Oil Field Offshore Norway. Sensors. 2023; 23(16):7197. https://doi.org/10.3390/s23167197
Chicago/Turabian StyleEttayebi, Mohammed, Shunguo Wang, and Martin Landrø. 2023. "Time-Lapse 3D CSEM for Reservoir Monitoring Based on Rock Physics Simulation of the Wisting Oil Field Offshore Norway" Sensors 23, no. 16: 7197. https://doi.org/10.3390/s23167197
APA StyleEttayebi, M., Wang, S., & Landrø, M. (2023). Time-Lapse 3D CSEM for Reservoir Monitoring Based on Rock Physics Simulation of the Wisting Oil Field Offshore Norway. Sensors, 23(16), 7197. https://doi.org/10.3390/s23167197