
Arithmetic Optimization AOMDV Routing Protocol for FANETs


Abstract
:1. Introduction
2. Related Works
3. AO-AOMDV Routing Protocol
3.1. Problem Statement
3.2. Proposed Method
- The congestion situation of each node in the routing;
- The residual energy of each node in the route;
- The link holding time for each path in the routing.
- The mobility of nodes may lead to link disconnections and time delays;
- All moving nodes in the FANETs are initialized with equal energy and quality;
- Nodes exhibit random mobility, resulting in constantly changing distances between nodes;
- FANETs consist of mobile nodes, each having a unique identification number.
3.3. Fitness Function
- Link Holding Time:Assuming that the drone node can obtain its current location and speed information by receiving GPS signals, the communication duration between two nodes can be predicted based on the current location and speed information of the nodes. The model for predicting the keep-alive time is as follows:where R represents the communication range of a node. The coordinates of node M are , and its velocities along the axes are . The coordinates of node N are , and its velocities along the axes are . Let ,
- Residual Energy:When the MANETs’ nodes communicate wirelessly with each other, there are many factors that affect their energy consumption rate. Among these, the most critical factor is the operating mode of the WiFi device. Under different operating modes, the wireless channel between nodes has different physical layer states, which correspond to different antenna reception and transmission powers.Taking the IEEE 802.11 physical layer and MAC layer interaction protocol, which is the most commonly used in networking, as an example, the energy consumption of a node’s wireless communication is mainly determined by the six states defined by the 802.11 protocol. Different device states correspond to different working currents. Therefore, the energy consumed by a wireless network card within a certain working time can be expressed as Equation (2).when , can be one of the following states: IDLE, CCA BUSY (clear channel assessment busy), Tx, Rx, Switching, or Sleep. and represent the power and current consumption corresponding to each Statusi state, respectively. U is the rated voltage for the wireless network card. is the total time that the wireless network card stays in the state during the time interval .The node calculates its remaining energy at time t using the following equation:where represents the initial energy of the node.
- Congestion Degree:Congestion can cause increased network delays, packet loss, and energy consumption. To address this problem, this paper proposes a congestion detection method: using the ratio of the number of packets cached in the MAC layer interface queue to the maximum length of the interface queue as a measure of the current node load. The formula for calculating the current payload congestion degree, denoted as , of node j on path i is as follows:where represents the number of packets cached in the MAC layer interface queue of node j, and represents the maximum number of packets that the MAC layer interface queue of node j can accommodate the length of the interface queue. The length of the interface queue is the maximum packet length set for each node’s buffer, and its value is fixed. As packets enter or leave the network, the number of packets cached in the MAC layer interface queue of a node changes continuously, so the ratio of the number of packets cached in the MAC layer interface queue to the length of the interface queue varies at different times, indicating different congestion degrees of the node.
3.4. Route Process
3.4.1. Route Discovery Process
3.4.2. Route Maintenance Process
| Algorithm 1: AO Pseudo code |
 |
- (1)
- Route Discovery Initiation: The source node S initiates the route discovery process by broadcasting an RREQ message to its neighboring nodes.
- (2)
- RREQ Propagation: The RREQ message is propagated from one node to another based on the routing protocol’s algorithm. The RREQ message contains information about the source node S, destination node D, and other necessary parameters.
- (3)
- Reverse Path Setup: Intermediate nodes and/or the destination node D, upon receiving the RREQ message, establish reverse paths to the source node S. These reverse paths will be used later for returning the RREP message.
- (4)
- RREP Generation and Propagation: Once the RREQ message reaches the destination node D, it generates an RREP message. The RREP message is then propagated back to the source node S through the pre-established reverse paths.
- (5)
- Multiple Forward Paths Establishment: The source node S and the destination node D establish multiple forward paths between them. These forward paths are designed to be disjoint, ensuring redundancy and reliability.
- (6)
- Fitness Function Evaluation: For each of the established forward paths, a fitness function is applied to calculate their fitness values. The fitness function considers factors such as path holding time, energy consumption, congestion degree, etc.
- (7)
- AO Path Selection: We will sort the fitness values of all routes calculated through arithmetic optimization in descending order. The route from the source node to the destination node will automatically select the top-ranked route to transmit data packets. In the event of a link disruption, the second-ranked route in the sorting will be chosen to transmit data packets, and so on, in a sequential manner.
4. Performance Evaluation
4.1. Performance Metrics
- (1)
- PDR: The number of data packets successfully received by the destination node divided by the number of data packets sent by the source node, excluding control packet traffic.
- (2)
- Average E2E: The total simulation time divided by the total number of data packets sent by the source node.
- (3)
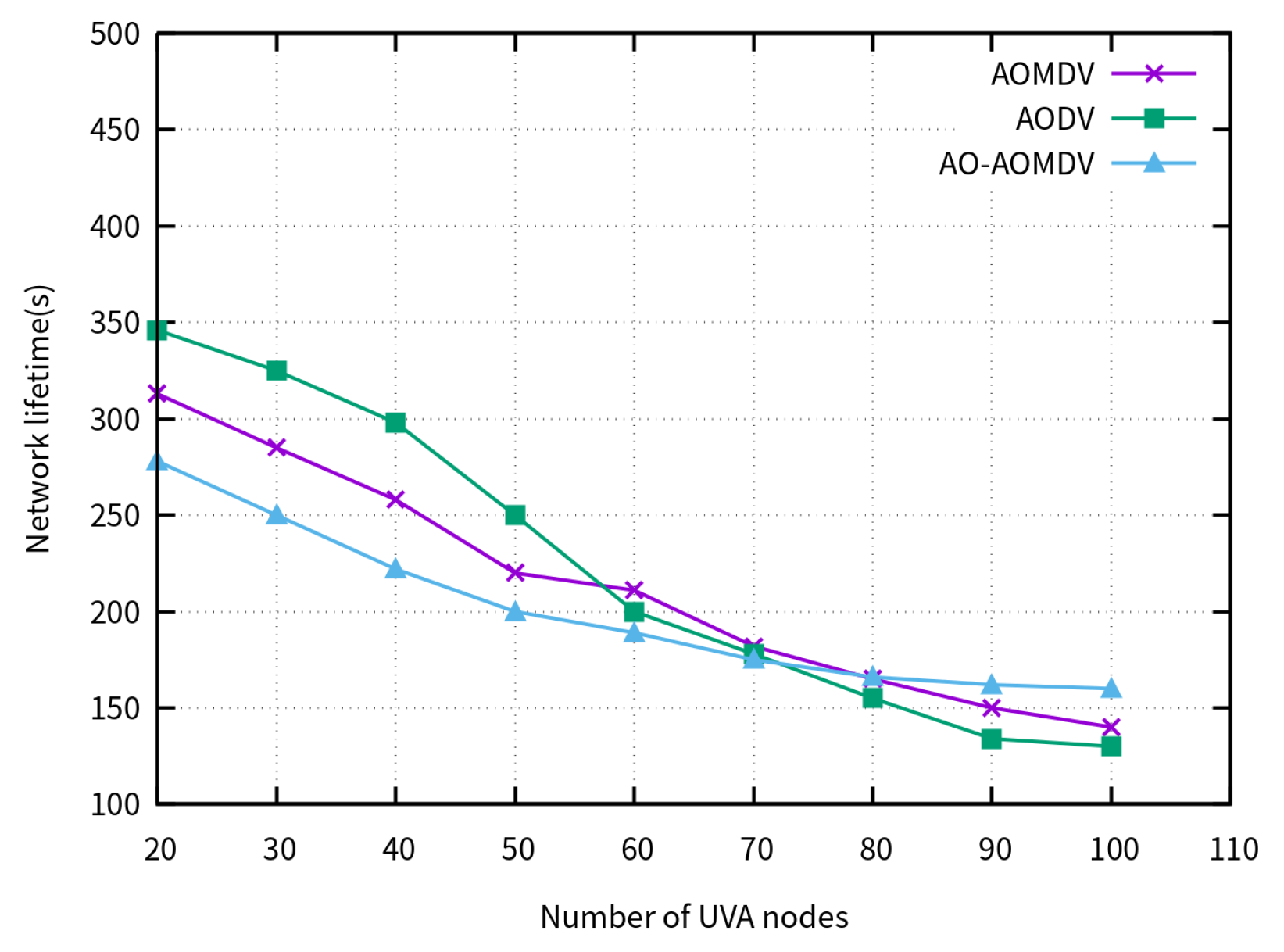
- Network Lifetime: The time taken for the simulation until the first node’s death, with a longer network lifetime indicating more robust routing.
4.2. Simulation Environment
4.3. Simulation Results and Discussion
4.3.1. Impact of UAV Node Velocity
4.3.2. Impact of UAV Node Density
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jacobsen, R.H.; Matlekovic, L.; Shi, L.; Malle, N.; Ayoub, N.; Hageman, K.; Hansen, S.; Nyboe, F.F.; Ebeid, E. Design of an Autonomous Cooperative Drone Swarm for Inspections of Safety Critical Infrastructure. Appl. Sci. 2023, 13, 1256. [Google Scholar] [CrossRef]
- Norhashim, N.; Kamal, N.M.; Shah, S.A.; Sahwee, Z.; Ruzani, A. A Review of Unmanned Aerial Vehicle (UAV) Technology Adoption for Precision Agriculture (PA) in Malaysia. Unmanned Syst. 2022. [Google Scholar]
- Mehmood, A.; Iqbal, Z.; Shah, A.A.; Maple, C.; Lloret, J. An Intelligent Cluster-Based Communication System for Multi-Unmanned Aerial Vehicles for Searching and Rescuing. Electronics 2023, 12, 607. [Google Scholar] [CrossRef]
- Luo, S.; Liang, Y.; Luo, Z.; Liang, G.; Wang, C.; Wu, X. Vision-Guided Object Recognition and 6D Pose Estimation System Based on Deep Neural Network for Unmanned Aerial Vehicles towards Intelligent Logistics. Appl. Sci. 2022, 13, 115. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, K.; Luo, Q.; Wu, G.; Pedrycz, W. A GV-drone Arc Routing Approach for Urban Traffic Patrol by Coordinating a Ground Vehicle and Multiple Drones. Swarm Evol. Comput. 2023, 77, 101246. [Google Scholar] [CrossRef]
- Boukerche, A.; Turgut, B.; Aydin, N.; Ahmad, M.Z.; Bölöni, L.; Turgut, D. Routing protocols in ad hoc networks: A survey. Comput. Netw. 2011, 55, 3032–3080. [Google Scholar] [CrossRef]
- Martin, M.; Widmer, J.; Hartenstein, H. A survey on position-based routing in mobile ad hoc networks. IEEE Netw. 2001, 15, 30–39. [Google Scholar]
- Marina, M.K.; Das, S.R. Performance of route caching strategies in dynamic source routing. In Proceedings of the 21st International Conference on Distributed Computing Systems Workshops, Mesa, AZ, USA, 16–19 April 2001; IEEE: New York, NY, USA, 2001. [Google Scholar]
- Bibb, C.J. Multiple Path Reactive Routing in a Mobile Ad Hoc Network. U.S. Patent No. 6,961,310, 1 November 2005. [Google Scholar]
- Bouhorma, M.; Bentaouit, H.; Boudhir, A. Performance comparison of ad-hoc routing protocols AODV and DSR. In Proceedings of the 2009 International Conference on Multimedia Computing and Systems, Quarzazate, Morocco, 2–4 April 2009; IEEE: New York, NY, USA, 2009. [Google Scholar]
- Cheng, Y.; Cetinkaya, E.K.; PG Sterbenz, J.P.G. Dynamic source routing (DSR) protocol implementation in ns-3. In Proceedings of the 5th International ICST Conference on Simulation Tools and Techniques, Desenzano del Garda, Italy, 19–23 March 2012. [Google Scholar]
- Royer, E.M.; Perkins, C.E. Multicast operation of the ad-hoc on-demand distance vector routing protocol. In Proceedings of the 5th Annual ACM/IEEE International Conference on Mobile Computing and Networking, Seattle, WA, USA, 15–19 August 1999. [Google Scholar]
- Marina, M.K.; Das, S.R. Ad hoc on-demand multipath distance vector routing. Wirel. Commun. Mob. Comput. 2006, 6, 969–988. [Google Scholar] [CrossRef]
- Zapata, M.G. Secure ad hoc on-demand distance vector routing. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2002, 6, 106–107. [Google Scholar] [CrossRef]
- Perkins, C.; Belding-Royer, E.; Das, S. Ad Hoc on-Demand Distance Vector (AODV) Routing. Comput. Netw. 2003, 223. [Google Scholar]
- Zhang, Y.; Gulliver, T.A. Quality of service for ad hoc on-demand distance vector routing. In Proceedings of the WiMob’2005 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Montreal, QC, Canada, 21–23 June 2005; IEEE: New York, NY, USA, 2005; Volume 3. [Google Scholar]
- Mohamed, H.; Lee, M.H.; Sarahintu, M.; Salleh, S.; Sanugi, B. Application of Taguchi’s Design of Experiment in Performance Analysis of Destination Sequence Distance Vector (DSDV) Routing Protocol. Sains Malays. 2009, 38, 423–428. [Google Scholar]
- Jacquet, P.; Muhlethaler, P.; Clausen, T.; Laouiti, A.; Qayyum, A.; Viennot, L. Optimized link state routing protocol for ad hoc networks. In Proceedings of the IEEE International Multi Topic Conference, Lahore, Pakistan, 28–30 December 2001; IEEE: New York, NY, USA, 2001. [Google Scholar]
- Tonnesen, A. Implementing and Extending the Optimized Link State Routing Protocol; Department of Informatics, University of Oslo: Oslo, Norway, 2004. [Google Scholar]
- Murthy, S.; Garcia-Luna-Aceves, J.J. An efficient routing protocol for wireless networks. Mob. Netw. Appl. 1996, 1, 183–197. [Google Scholar] [CrossRef]
- Sholander, P.; Oakes, T.; Coccoli, P. Wireless Routing Protocol for Ad-Hoc Networks. U.S. Patent No. 7,177,295, 13 February 2007. [Google Scholar]
- Haas, Z.J.; Pearlman, M.C. The performance of query control schemes for the zone routing protocol. ACM SIGCOMM Comput. Commun. Rev. 1998, 28, 167–177. [Google Scholar] [CrossRef]
- Beijar, N. Zone Routing Protocol (ZRP). Netw. Lab. Hels. Univ. Technol. 2002, 9, 12. [Google Scholar]
- Zhang, X.; Lillykutty, J. Multicast zone routing protocol in mobile ad hoc wireless networks. In Proceedings of the 28th Annual IEEE International Conference on Local Computer Networks, 2003, LCN’03, Bonn/Konigswinter, Germany, 20–24 October 2003. [Google Scholar]
- Joa-Ng, M.; I-Tai, L. A peer-to-peer zone-based two-level link state routing for mobile ad hoc networks. IEEE J. Sel. Areas Commun. 1999, 17, 1415–1425. [Google Scholar] [CrossRef]
- Takahashi, M.; Bandai, M.; Sasase, I. Multilevel zone-based hierarchical link state routing with location search technique applying hierarchical request for mobile ad hoc networks. Electron. Commun. Jpn. Part I Commun. 2005, 88, 44–52. [Google Scholar] [CrossRef]
- Karp, B.; Kung, H.T. GPSR: Greedy perimeter stateless routing for wireless networks. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000. [Google Scholar]
- Yu, Y.; Govindan, R.; Estrin, D. Geographical and Energy Aware Routing: A Recursive Data Dissemination Protocol for Wireless Sensor Networks. 2001. Available online: https://redirect.cs.umbc.edu/~younis/Sensor_Networks/Reading_Assignments/14.pdf (accessed on 28 August 2023).
- Newsome, J.; Song, D. GEM: Graph embedding for routing and data-centric storage in sensor networks without geographic information. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003. [Google Scholar]
- Shaik, S.; Venkata Ratnam, D. Ant-Colony Optimization Based Energy Aware Cross Layer Routing Protocol to Improve Route Reliability in MANETs. Wirel. Pers. Commun. 2023, 129, 1865–1879. [Google Scholar]
- Morkevičius, N.; Liutkevičius, A.; Venčkauskas, A. Multi-Objective Path Optimization in Fog Architectures Using the Particle Swarm Optimization Approach. Sensors 2023, 23, 3110. [Google Scholar] [CrossRef]
- Desai, D.; El-Ocla, H.; Purohit, S. Data Dissemination in VANETs Using Particle Swarm Optimization. Sensors 2023, 23, 2124. [Google Scholar] [CrossRef]
- Husnain, G.; Anwar, S.; Sikander, G.; Ali, A.; Lim, S. A Bio-Inspired Cluster Optimization Schema for Efficient Routing in Vehicular Ad Hoc Networks (VANETs). Energies 2023, 16, 1456. [Google Scholar] [CrossRef]
- Shabani, S.; Moghim, N.; Bohlooli, A. A new on the fly energy-efficient opportunistic routing in wireless multi-hop networks. J. Chin. Inst. Eng. 2023, 46, 107–117. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Abd Elaziz, M.; Gandomi, A.H. The arithmetic optimization algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Agushaka, J.O.; Ezugwu, A.E. Advanced arithmetic optimization algorithm for solving mechanical engineering design problems. PLoS ONE 2021, 16, e0255703. [Google Scholar] [CrossRef] [PubMed]
- Khatir, S.; Tiachacht, S.; Le Thanh, C.; Ghandourah, E.; Mirjalili, S.; Wahab, M.A. An improved Artificial Neural Network using Arithmetic Optimization Algorithm for damage assessment in FGM composite plates. Compos. Struct. 2021, 273, 114287. [Google Scholar] [CrossRef]
- Wang, R.B.; Wang, W.F.; Xu, L.; Pan, J.S.; Chu, S.C. An adaptive parallel arithmetic optimization algorithm for robot path planning. J. Adv. Transp. 2021, 2021, 3606895. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Sumari, P.; Gandomi, A.H. A novel evolutionary arithmetic optimization algorithm for multilevel thresholding segmentation of COVID-19 ct images. Processes 2021, 9, 1155. [Google Scholar] [CrossRef]
- Sarhan, S.; Sarhan, S. Elephant herding optimization Ad Hoc on-demand multipath distance vector routing protocol for MANET. IEEE Access 2021, 9, 39489–39499. [Google Scholar] [CrossRef]
- Praveenkumar, R.; Anbukaruppusamy, S. Greedy Weight Matrix Topological Adaptive Ad Hoc On-demand Multipath Distance Vector Protocol for QOS Improvement in MANET. Wirel. Pers. Commun. 2022, 125, 1737–1751. [Google Scholar] [CrossRef]
- Taha, A.; Alsaqour, R.; Uddin, M.; Abdelhaq, M.; Saba, T. Energy efficient multipath routing protocol for mobile ad-hoc network using the fitness function. IEEE Access 2017, 5, 10369–10381. [Google Scholar] [CrossRef]
- Chen, J.; Li, Z.; Liu, J.; Kuo, Y. QoS multipath routing protocol based on cross layer design for ad hoc networks. In Proceedings of the 2011 International Conference on Internet Computing and Information Services, Washington, DC, USA, 17–18 September 2011. [Google Scholar]
- Lin, Z.; Jie Sun, J. Routing Protocol Based on Link Stability in MANET. In Proceedings of the 2021 World Automation Congress (WAC), Online, 1–6 August 2021. [Google Scholar]
- Logesh, B.R.; Balasubramanie, P. Fuzzy rule selection using hybrid artificial bee colony with 2-opt algorithm for MANET. Mob. Netw. Appl. 2020, 25, 585–595. [Google Scholar] [CrossRef]
- Banerjee, A.; Chowdhury, S. Expected residual lifetime based ad hoc on-demand multipath routing protocol (ERL-AOMDV) in mobile ad hoc networks. Int. J. Inf. Technol. 2019, 11, 727–733. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Simulator | NS3 |
| Maximum number of nodes | 100 |
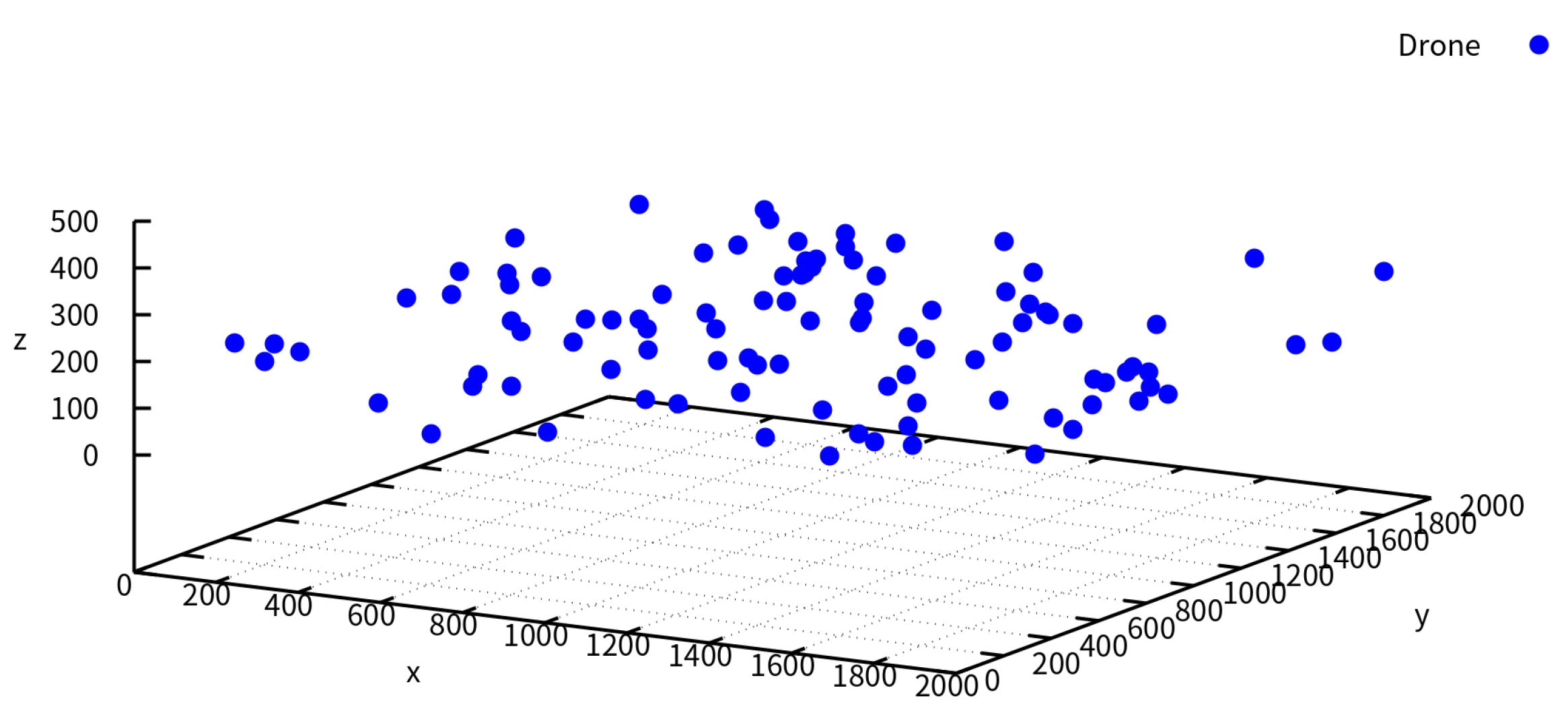
| 3D network dimension | 2000 m × 2000 m × 300 m |
| MAC protocol | IEEE 802.11n |
| Bandwidth | 20 MHz |
| Velocity | 10–40 m/s |
| CBR rate | 1 Mbps |
| Transport protocol | UDP |
| Mobility model | 3D Gauss Markov mobility model |
| Simulation time | 600 s |
| Compared routing protocol | AOMDV, AODV |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Li, Y.; Zhang, Y.; Huang, T.; Jiang, Y. Arithmetic Optimization AOMDV Routing Protocol for FANETs. Sensors 2023, 23, 7550. https://doi.org/10.3390/s23177550
Wang H, Li Y, Zhang Y, Huang T, Jiang Y. Arithmetic Optimization AOMDV Routing Protocol for FANETs. Sensors. 2023; 23(17):7550. https://doi.org/10.3390/s23177550
Chicago/Turabian StyleWang, Huamin, Yongfu Li, Yubing Zhang, Tiancong Huang, and Yang Jiang. 2023. "Arithmetic Optimization AOMDV Routing Protocol for FANETs" Sensors 23, no. 17: 7550. https://doi.org/10.3390/s23177550
APA StyleWang, H., Li, Y., Zhang, Y., Huang, T., & Jiang, Y. (2023). Arithmetic Optimization AOMDV Routing Protocol for FANETs. Sensors, 23(17), 7550. https://doi.org/10.3390/s23177550