
Fast Feature Extraction Method for Brillouin Scattering Spectrum of OPGW Optical Cable Based on BOTDR

Abstract
:1. Introduction
2. Materials and Methods
2.1. BOTDR BGS Image Denoising for BM3D
2.1.1. Base Estimate
2.1.2. Final Estimate
2.2. Sobel-Based BOTDR Brillouin Gain Spectrum Frequency Shift Feature Extraction
3. Numerical Simulation and Analysis
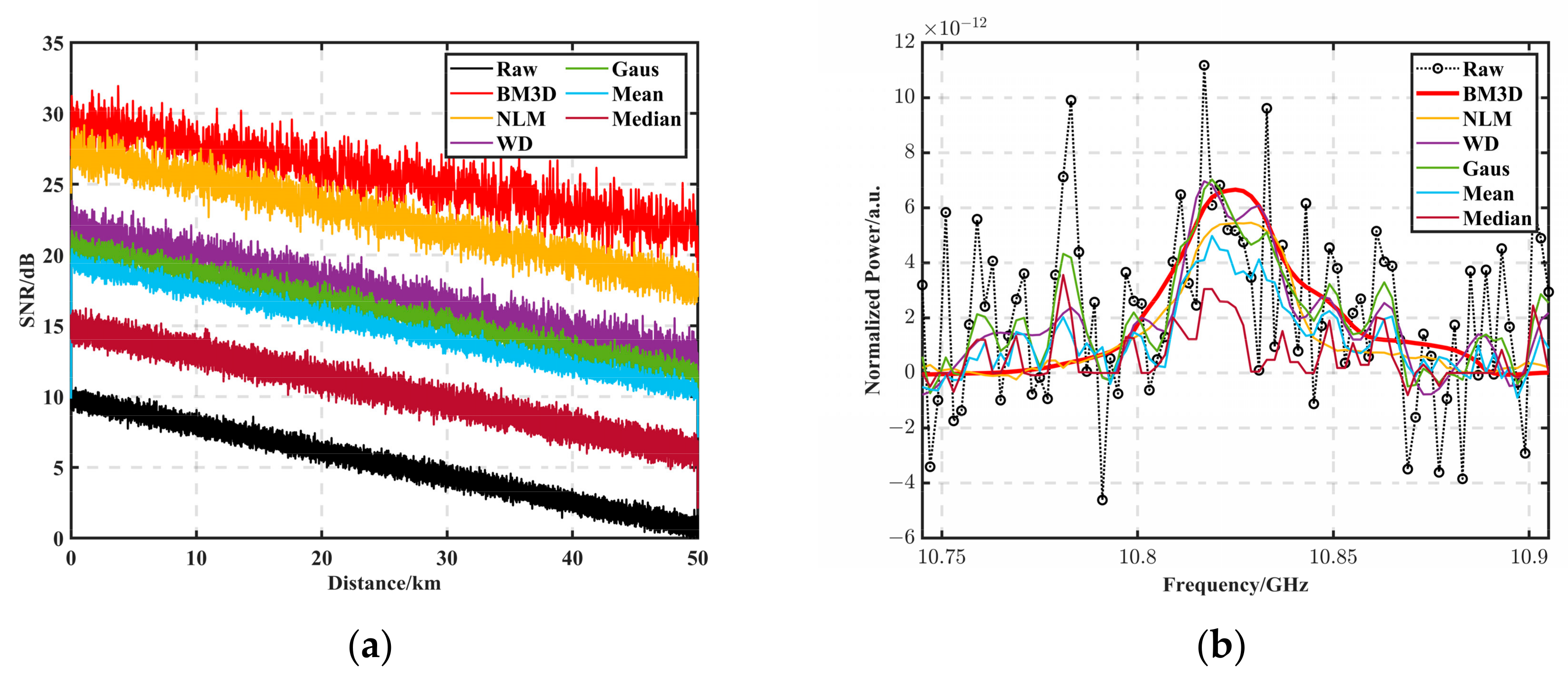
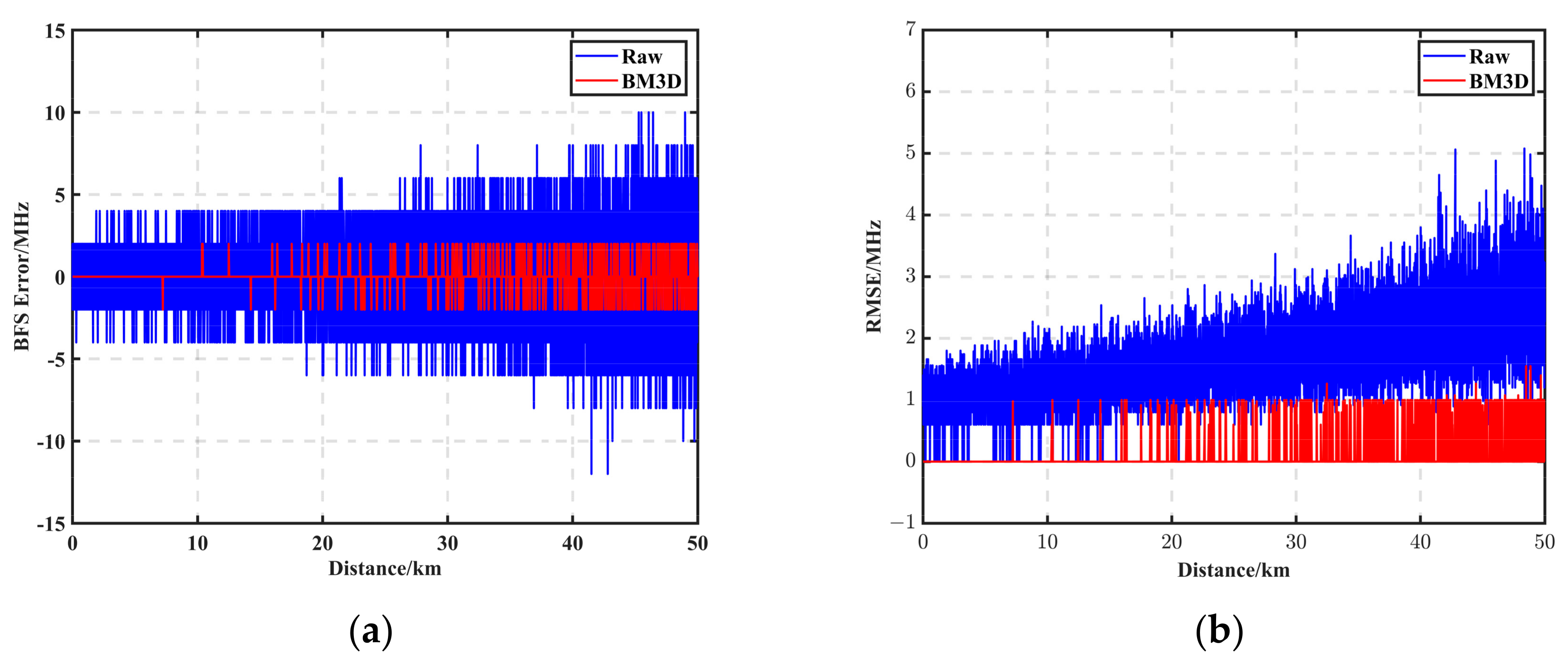
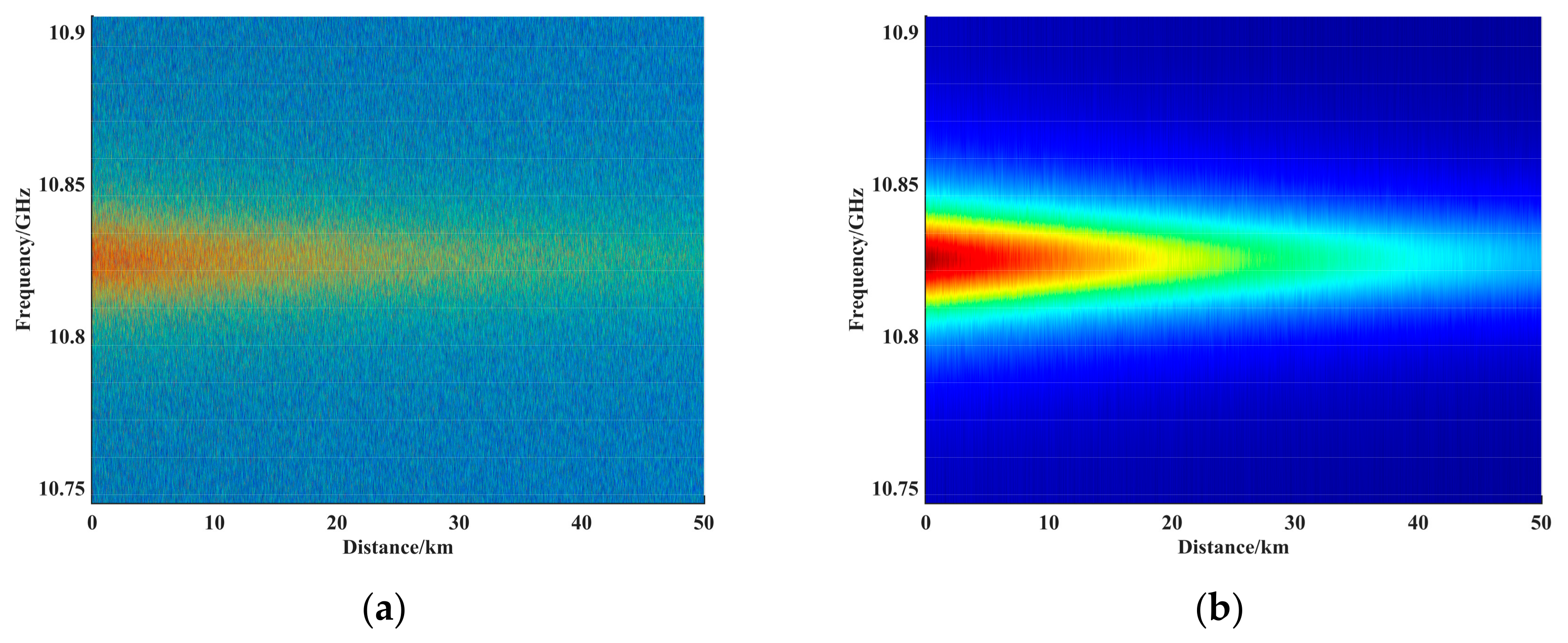
3.1. BM3D Filtering Performance Analysis
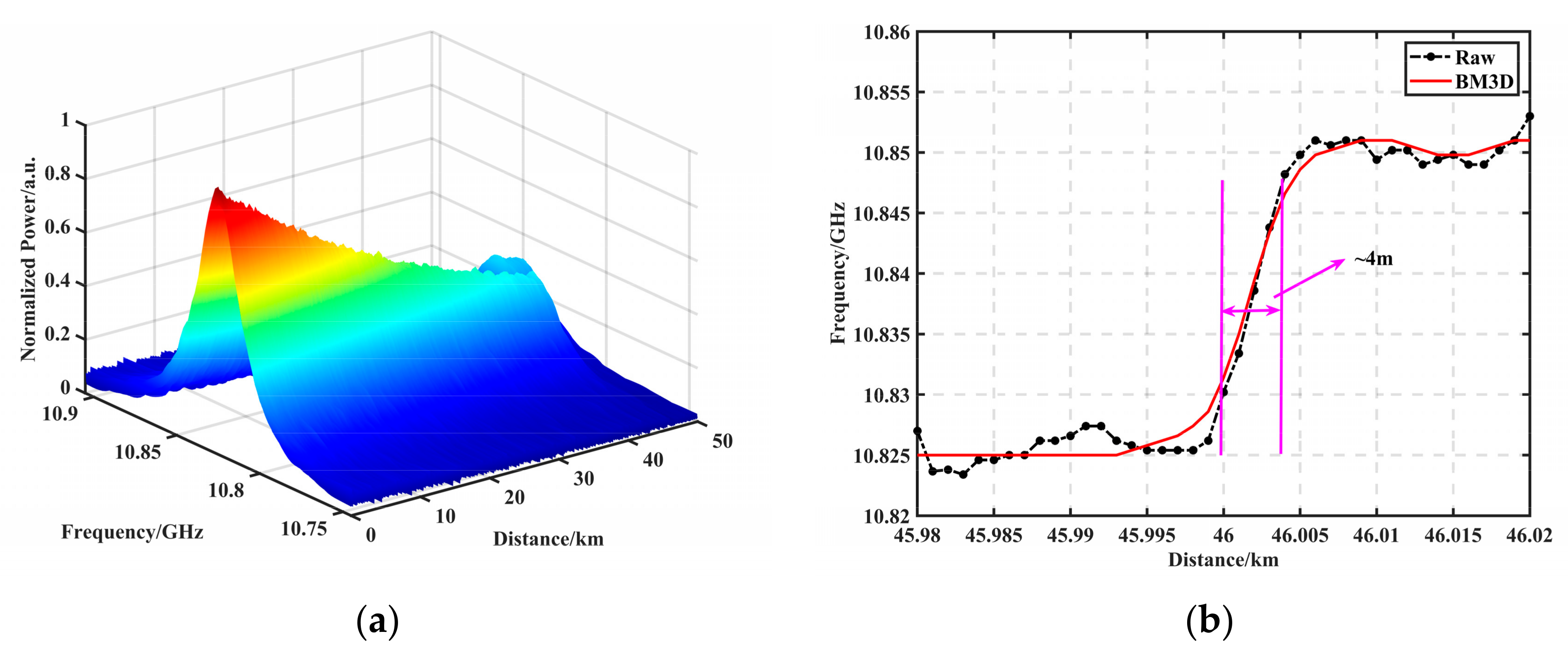
3.2. Analysis of Spatial Resolution and Computational Complexity of BM3D Filtering
3.3. Sobel Feature Extraction Performance Analysis
4. Demonstration Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, R.; Zhu, Y.; Tian, L.; Zhou, L.; Liu, W.; Cheng, L. On-situ monitoring of sleet-thawing for OPGW based on long distance BOTDR. Optoelectron. Lett. 2021, 17, 226–230. [Google Scholar] [CrossRef]
- Cai, L.; Han, T.; Wang, J.; Xue, J.; Xu, F.; Zhou, M.; Fan, Y. Experimental analysis of the strands breaking characteristics of optical fibre composite overhead ground wire due to simulating lightning strike. IET Gener. Transm. Distrib. 2020, 14, 2922–2929. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, Z.; Li, Y.; Yan, Z.; Zhai, T.; Li, L.; Xiao, Z. Distributed Transmission Line Ice-Coating Recognition System Based on BOTDR Temperature Monitoring. J. Light. Technol. 2021, 39, 3967–3973. [Google Scholar] [CrossRef]
- Dong, Y. High-Performance Distributed Brillouin Optical Fiber Sensing. Photonic Sens. 2021, 11, 69–90. [Google Scholar] [CrossRef]
- Nie, T.; Li, J.; Ding, Y.; Zhang, Z.; Li, B.; Dong, W. Fast extraction for Brillouin frequency shift in BOTDA system. Opt. Quantum Electron. 2021, 53, 73. [Google Scholar] [CrossRef]
- Gao, L.; Han, C.; Xu, Z.; Jin, Y.; Yan, J. Experimental Study on Deformation Monitoring of Bored Pile Based on BOTDR. Appl. Sci. 2019, 9, 2435. [Google Scholar] [CrossRef]
- Soto, M.A.; Thévenaz, L. Modeling and evaluating the performance of Brillouin distributed optical fiber sensors. Opt. Express 2013, 21, 31347. [Google Scholar] [CrossRef]
- Bado, M.F.; Casas, J.R. A review of recent distributed optical fiber sensors applications for civil engineering structural health monitoring. Sensors 2021, 21, 1818. [Google Scholar] [CrossRef]
- Zhang, Y.; Fu, G.; Liu, Y.; Bi, W.; Li, D. A novel fitting algorithm for Brillouin scattering spectrum of distributed sensing systems based on RBFN networks. Opt.—Int. J. Light Electron Opt. 2013, 124, 718–721. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, C.; Fu, X.; Li, D.; Jia, W.; Bi, W. An improved Newton algorithm based on finite element analysis for extracting the Brillouin scattering spectrum features. Measurement 2014, 51, 310–314. [Google Scholar] [CrossRef]
- Zhao, L.; Li, Y.; Xu, Z. A fast and high accurate initial values obtainment method for Brillouin scattering spectrum parameter estimation. Sens. Actuators A Phys. 2014, 210, 141–146. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, C.; Fu, X.; Liu, W.; Bi, W. Spectrum parameter estimation in Brillouin scattering distributed temperature sensor based on cuckoo search algorithm combined with the improved differential evolution algorithm. Opt. Commun. 2015, 357, 15–20. [Google Scholar] [CrossRef]
- Farahani, M.A.; Castillo-Guerra, E.; Colpitts, B.G. A Detailed Evaluation of the Correlation-Based Method Used for Estimation of the Brillouin Frequency Shift in BOTDA Sensors. IEEE Sens. J. 2013, 13, 4589–4598. [Google Scholar] [CrossRef]
- Azad, A.K.; Khan, F.N.; Alarashi, W.H.; Guo, N.; Lau, A.P.T.; Lu, C. Temperature extraction in Brillouin optical time-domain analysis sensors using principal component analysis based pattern recognition. Opt. Express 2017, 25, 16534. [Google Scholar] [CrossRef]
- Wu, H.; Wang, L.; Guo, N.; Shu, C.; Lu, C. Brillouin Optical Time-Domain Analyzer Assisted by Support Vector Machine for Ultrafast Temperature Extraction. J. Light. Technol. 2017, 35, 4159–4167. [Google Scholar] [CrossRef]
- Zhu, H.; Yu, L.; Zhang, Y.; Cheng, L.; Zhu, Z.; Song, J.; Zhang, J.; Luo, B.; Yang, K. Optimized Support Vector Machine Assisted BOTDA for Temperature Extraction with Accuracy Enhancement. IEEE Photonics J. 2020, 12, 1–14. [Google Scholar] [CrossRef]
- Farahani, M.A.; Wylie, M.T.V.; Castillo-Guerra, E.; Colpitts, B.G. Reduction in the Number of Averages Required in BOTDA Sensors Using Wavelet Denoising Techniques. J. Light. Technol. 2013, 13, 1134–1142. [Google Scholar] [CrossRef]
- Soto, M.A.; Ramírez, J.A.; Thévenaz, L. Intensifying the response of distributed optical fibre sensors using 2D and 3D image restoration. Nat. Commun. 2016, 7, 10870. [Google Scholar] [CrossRef]
- Qian, X.; Jia, X.; Wang, Z.; Zhang, B.; Xue, N.; Sun, W.; He, Q.; Wu, H. Noise level estimation of BOTDA for optimal non-local means denoising. Appl. Opt. 2017, 56, 4727. [Google Scholar] [CrossRef]
- Tian, C.; Fei, L.; Zheng, W.; Xu, Y.; Zuo, W.; Lin, W. Deep learning on image denoising: An overview. Neural Netw. 2020, 131, 251–275. [Google Scholar] [CrossRef]
- Cao, Z.; Guo, N.; Li, M.; Yu, K.; Gao, K. Back propagation neutral network based signal acquisition for Brillouin distributed optical fiber sensors. Opt. Express 2019, 27, 4549. [Google Scholar] [CrossRef] [PubMed]
- Chang, Y.; Wu, H.; Zhao, C.; Shen, L.; Fu, S.; Tang, M. Distributed Brillouin frequency shift extraction via a convolutional neural network. Photonics Res. 2020, 8, 690. [Google Scholar] [CrossRef]
- Wu, H.; Guo, N.; Feng, D.; Yin, G.; Zhu, T. Enhancing Spatial Resolution of BOTDR Sensors using Image Deconvolution. Opt. Express 2022, 30, 19652. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Jiang, N.; Han, X. Denoising of BOTDR Dynamic Strain Measurement Using Convolutional Neural Networks. Sensors 2023, 23, 1764. [Google Scholar] [CrossRef]
- Abubakar, A.; Zhao, X.; Li, S.; Takruri, M.; Bastaki, E.; Bermak, A. A Block-Matching and 3-D Filtering Algorithm for Gaussian Noise in DoFP Polarization Images. IEEE Sens. J. 2018, 18, 7429–7435. [Google Scholar] [CrossRef]
- Wu, H.; Wang, L.; Zhao, Z.; Guo, N.; Shu, C.; Lu, C. Brillouin optical time domain analyzer sensors assisted by advanced image denoising techniques. Opt. Express 2018, 26, 5126–5139. [Google Scholar] [CrossRef]
- Tian, R.; Sun, G.; Liu, X.; Zheng, B. Sobel Edge Detection Based on Weighted Nuclear Norm Minimization Image Denoising. Electronics 2021, 10, 655. [Google Scholar] [CrossRef]
- Elharrouss, O.; Hmamouche, Y.; Idrissi, A.K.; El Khamlichi, B.; El Fallah-Seghrouchni, A. Refined edge detection with cascaded and high-resolution convolutional network. Pattern Recognit. 2023, 138, 109361. [Google Scholar] [CrossRef]
- Li, J.; Zhou, W.; Zhang, Y.; Dong, W.; Zhang, X. A Novel Method of the Brillouin Gain Spectrum Recognition Using Enhanced Sobel Operators Based on BOTDA System. IEEE Sens. J. 2019, 19, 4093–4097. [Google Scholar] [CrossRef]
- Li, X.; Chang, Q.; Li, Y.; Miyazaki, J. Multi-Directional Sobel Operator Kernel on Gpus. SSRN Electron. J. 2022, 177, 160–170. [Google Scholar] [CrossRef]
- Chen, X.; Yu, H.; Huang, W. A high accurate fitting algorithm for Brillouin scattering spectrum of distributed sensing systems based on LSSVM networks. In Proceedings of the 2021 International Conference on Electronic Information Engineering and Computer Science (EIECS), Changchun, China, 23 September 2021. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | SNR of Raw Data/dB | Improvement in SNR/dB | Reduction in RMSE/MHz | Spatial Resolution/m | Fiber Length/km | i5 16G Processing Time/s | i9 128G Processing Time/s |
|---|---|---|---|---|---|---|---|
| BM3D | 0.90 | 20.99 | 4.00 | 4 | 50 | 243.22 | 63.83 |
| 3.67 | 20.70 | 2.74 | |||||
| 6.77 | 20.34 | 2.68 | |||||
| 9.75 | 19.35 | 1.54 | |||||
| NLM | 0.90 | 16.96 | 3.49 | 8 | 50 | 161.64 | 46.18 |
| 3.67 | 16.42 | 2.22 | |||||
| 6.77 | 15.72 | 1.40 | |||||
| 9.75 | 15.03 | 0.57 | |||||
| WD | 0.90 | 12.09 | 3.10 | 12 | 50 | 6.75 | 2.12 |
| 3.67 | 12.15 | 1.31 | |||||
| 6.77 | 12.05 | 1.19 | |||||
| 9.75 | 12.10 | 0.52 | |||||
| Gaus | 0.90 | 10.81 | 2.33 | 15 | 50 | 5.31 | 1.46 |
| 3.67 | 10.85 | 1.18 | |||||
| 6.77 | 10.70 | 1.12 | |||||
| 9.75 | 10.82 | 0.31 | |||||
| Mean | 0.90 | 9.66 | 1.99 | 15 | 50 | 4.98 | 1.52 |
| 3.67 | 9.67 | 0.99 | |||||
| 6.77 | 9.65 | 1.02 | |||||
| 9.75 | 9.64 | 0.26 | |||||
| Median | 0.90 | 5.29 | 1.04 | 15 | 50 | 4.14 | 1.11 |
| 3.67 | 5.27 | 0.85 | |||||
| 6.77 | 5.07 | 0.59 | |||||
| 9.75 | 5.03 | 0.12 |
| Algorithm | Average Error/MHz | Processing Time/s |
|---|---|---|
| LM | 3.2 | 351.81 |
| LSSVM | 2 | 229.55 |
| Sobel | 0.2 | 1.12 |
| Algorithm | 12 km SNR/dB | 12 km RMSE/MHz | Spatial Resolution/m | Processing Time/s |
|---|---|---|---|---|
| ave-100 | 1.07 | 119.04 | 8 | 2.41 |
| ave-50,000 | 19.45 | 2.26 | 5 | 618.74 |
| BM3D + Sobel | 21.36 | 0.12 | 4.5 | 16.75 |
| NLM | 17.41 | 0.64 | 8 | 12.13 |
| WD | 13.05 | 0.91 | 10 | 1.34 |
| Gaus | 10.86 | 2.25 | 15 | 1.01 |
| Mean | 9.84 | 2.97 | 15 | 0.95 |
| Median | 6.32 | 3.11 | 15 | 0.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Yu, H. Fast Feature Extraction Method for Brillouin Scattering Spectrum of OPGW Optical Cable Based on BOTDR. Sensors 2023, 23, 8166. https://doi.org/10.3390/s23198166
Chen X, Yu H. Fast Feature Extraction Method for Brillouin Scattering Spectrum of OPGW Optical Cable Based on BOTDR. Sensors. 2023; 23(19):8166. https://doi.org/10.3390/s23198166
Chicago/Turabian StyleChen, Xiaojuan, and Haoyu Yu. 2023. "Fast Feature Extraction Method for Brillouin Scattering Spectrum of OPGW Optical Cable Based on BOTDR" Sensors 23, no. 19: 8166. https://doi.org/10.3390/s23198166
APA StyleChen, X., & Yu, H. (2023). Fast Feature Extraction Method for Brillouin Scattering Spectrum of OPGW Optical Cable Based on BOTDR. Sensors, 23(19), 8166. https://doi.org/10.3390/s23198166