



Spherical Wrist Manipulator Local Planner for Redundant Tasks in Collaborative Environments

 ,
, 
 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Aim and Organization of the Work
2. Materials and Methods
2.1. Local Planning for Redundant Collaborative Tasks: Theoretical Formulation
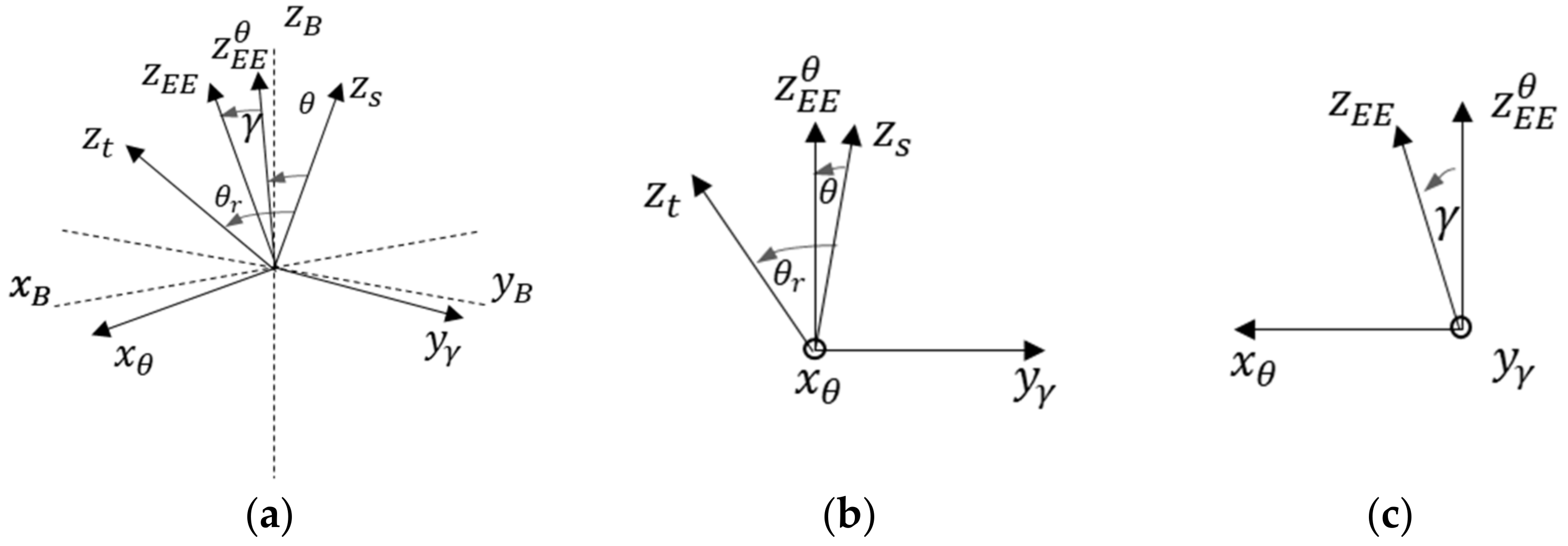
2.1.1. Task Parametrization: Separation of the Redundant Axis
Singularity Handling
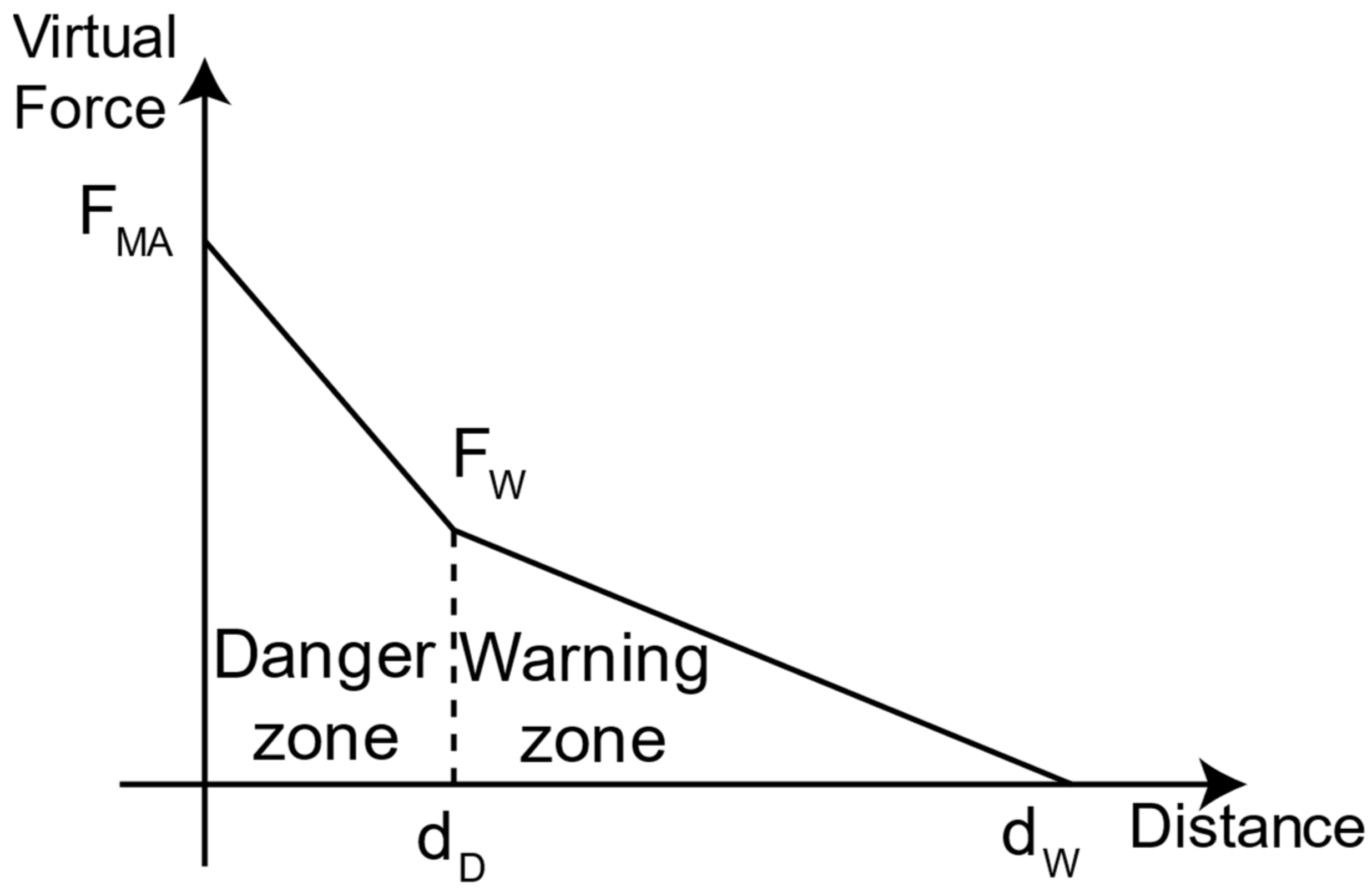
2.1.2. Disturbance Computation for Collision Avoidance
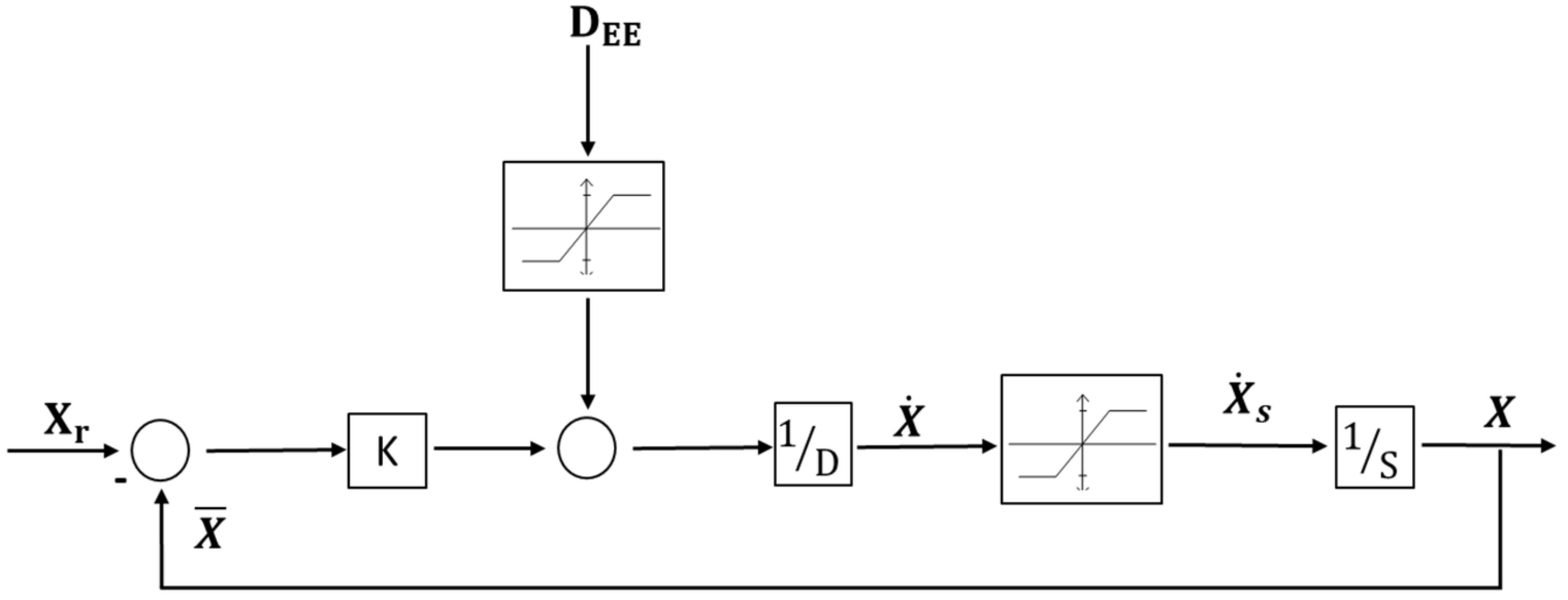
2.1.3. Control Law
2.2. Validation Methodology of the Theoretical Formulation: Simulations
2.2.1. Simulator
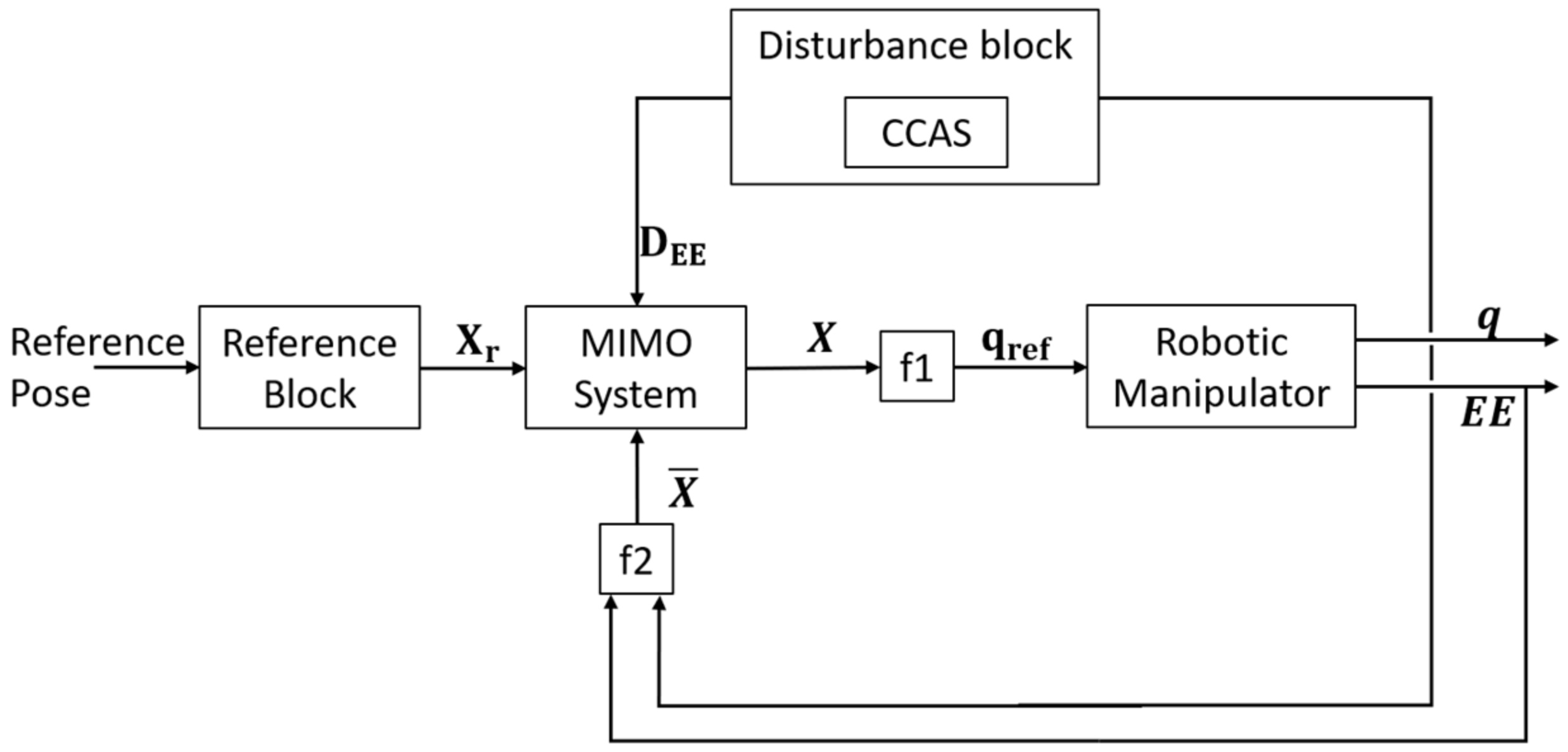
Simulator Architecture
Collision and Proximity Simulator
Simulator Parameters
2.2.2. Validation Scenarios
Periodic Signal
Sequence of Step Signals
Close-Obstacle Collision Avoidance
3. Results
3.1. Time Domain Analysis Results
3.2. Frequency Domain Analysis Results
3.3. Close-Obstacle Collision Avoidance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IRB 120 ABB’s 6 Axis Robot—For Flexible and Compact Production; ABB Robotics: Zurich, Switzerland, 2021; Available online: https://new.abb.com/products/robotics/industrial-robots/irb-120 (accessed on 31 October 2022).
- Svenska Institutet för Standarder. Robots for Industrial Environments-Safety Requirements; Svenska Institutet för Standarder: Stockholm, Sweden, 2006. [Google Scholar]
- Matthias, B. ISO/TS 15066; Collaborative Robots Present Status. International Organization for Standardization: Geneva, Switzerland, 2016.
- Haddadin, S.; Albu-Schäffer, A.; Hirzinger, G. Requirements for Safe Robots: Measurements, Analysis and New Insights. Int. J. Robot. Res. 2009, 28, 1507–1527. [Google Scholar] [CrossRef] [Green Version]
- Hentout, A.; Aouache, M.; Maoudj, A.; Akli, I. Human–robot interaction in industrial collaborative robotics: A literature review of the decade 2008–2017. Adv. Robot. 2019, 33, 764–799. [Google Scholar] [CrossRef]
- Mazzocchi, T.; Diodato, A.; Ciuti, G.; De Micheli, D.M.; Menciassi, A. Smart sensorized polymeric skin for safe robot collision and environmental interaction. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 837–843. [Google Scholar] [CrossRef]
- Zinn, M.; Roth, B.; Khatib, O.; Salisbury, J.K. A New Actuation Approach for Human Friendly Robot Design. Int. J. Robot. Res. 2004, 23, 379–398. [Google Scholar] [CrossRef]
- O’Neill, J.; Lu, J.; Dockter, R.; Kowalewski, T. Practical, stretchable smart skin sensors for contact-aware robots in safe and collaborative interactions. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 26–30 May 2015; pp. 624–629. [Google Scholar] [CrossRef]
- García, J.G.; Robertsson, A.; Ortega, J.G.; Johansson, R. Sensor Fusion for Compliant Robot Motion Control. IEEE Trans. Robot. 2008, 24, 430–441. [Google Scholar] [CrossRef]
- Lavalle, S.M. PLANNING ALGORITHMS. Available online: http://planning.cs.uiuc.edu/ (accessed on 31 October 2022).
- Khatib, O. Real-Time Obstacle Avoidance for manipultors and mobile robots. In Autonomous Robot Vehicles; Springer: New York, NY, USA, 1986; pp. 396–404. [Google Scholar]
- Haddadin, S.; Urbanek, H.; Parusel, S.; Burschka, D.; Rossmann, J.; Albu-Schäffer, A.; Hirzinger, G. Real-time reactive motion generation based on variable attractor dynamics and shaped velocities. In Proceedings of the IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, IROS 2010—Conference Proceedings, Taipei, Taiwan, 18–22 October 2010; pp. 3109–3116. [Google Scholar] [CrossRef] [Green Version]
- Xiao, W.; Huan, J. Redundancy and optimization of a 6R robot for five-axis milling applications: Singularity, joint limits and collision. Prod. Eng. 2012, 6, 287–296. [Google Scholar] [CrossRef]
- Lukić, B.; Petrič, T.; Žlajpah, L.; Jovanović, K. KUKA LWR Robot Cartesian Stiffness Control Based on Kinematic Redundancy. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2020; Volume 980, pp. 310–318. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Rocco, P.; Robertsson, A.; Johansson, R. Exploiting task redundancy in industrial manipulators during drilling operations. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 128–133. [Google Scholar] [CrossRef]
- Guo, Y.; Dong, H.; Ke, Y. Stiffness-oriented posture optimization in robotic machining applications. Robot. Comput. Manuf. 2015, 35, 69–76. [Google Scholar] [CrossRef]
- Cafarelli, A.; Mura, M.; Diodato, A.; Schiappacasse, A.; Santoro, M.; Ciuti, G.; Menciassi, A. A computer-assisted robotic platform for Focused Ultrasound Surgery: Assessment of high intensity focused ultrasound delivery. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, Milan, Italy, 25–29 August 2015; pp. 1311–1314. [Google Scholar] [CrossRef]
- Su, H.; Sandoval, J.; Makhdoomi, M.; Ferrigno, G.; De Momi, E. Safety-Enhanced Human-Robot Interaction Control of Redundant Robot for Teleoperated Minimally Invasive Surgery. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, QLD, Australia, 21–25 May 2018; pp. 6611–6616. [Google Scholar] [CrossRef]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer Science & Business Media: Berlin, Germany, 2008; Available online: https://link.springer.com/content/pdf/bfm:978-3-319-32552-1/1.pdf (accessed on 1 November 2022).
- Chiurazzi, M.; Garozzo, G.G.; Dario, P.; Ciuti, G. Novel Capacitive-Based Sensor Technology for Augmented Proximity Detection. IEEE Sens. J. 2020, 20, 6624–6633. [Google Scholar] [CrossRef]
- Chiurazzi, M.; Diodato, A.; Vetrò, I.; Alcaide, J.O.; Menciassi, A.; Ciuti, G. Intrinsically Distributed Probabilistic Algorithm for Human–Robot Distance Computation in Collision Avoidance Strategies. Electronics 2020, 9, 548. [Google Scholar] [CrossRef] [Green Version]
- Takaya, K.; Asai, T.; Kroumov, V.; Smarandache, F. Simulation environment for mobile robots testing using ROS and Gazebo. In Proceedings of the 2016 20th International Conference on System Theory, Control and Computing, ICSTCC 2016—Joint Conference of SINTES 20, SACCS 16, SIMSIS 20—Proceedings, Sinaia, Romania, 13–15 October 2016; pp. 96–101. [Google Scholar] [CrossRef]
- Balamurugan, B.; Maheswari, K.G.; Skariah, A.; Malathi, V.; Nalinipriya, G. Acceleration of bullet physics physical simulation library using GPU and demonstration on a set-Top box platform. In Proceedings of the ACM International Conference Proceeding Series, Udaipur, India, 4–5 March 2016. [Google Scholar] [CrossRef]
- Xia, J.; Jiang, Z.; Liu, H.; Cai, H.; Wu, G. A Novel hybrid safety-control strategy for a manipulator. Int. J. Adv. Robot Syst. 2014, 11, 2014. [Google Scholar] [CrossRef]
- Huber, J.E.; Fleck, N.A.; Ashby, M.F. The selection of mechanical actuators based on performance indices. Proc. R. Soc. Lond. 1997, 453, 2185–2205. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Bascetta, L.; Rocco, P. Achieving Humanlike Motion: Resolving Redundancy for Anthropomorphic Industrial Manipulators. IEEE Robot. Autom. Mag. 2013, 20, 131–138. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Rocco, P. Reactive motion planning and control for compliant and constraint-based task execution. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2748–2753. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chiurazzi, M.; Alcaide, J.O.; Diodato, A.; Menciassi, A.; Ciuti, G. Spherical Wrist Manipulator Local Planner for Redundant Tasks in Collaborative Environments. Sensors 2023, 23, 677. https://doi.org/10.3390/s23020677
Chiurazzi M, Alcaide JO, Diodato A, Menciassi A, Ciuti G. Spherical Wrist Manipulator Local Planner for Redundant Tasks in Collaborative Environments. Sensors. 2023; 23(2):677. https://doi.org/10.3390/s23020677
Chicago/Turabian StyleChiurazzi, Marcello, Joan Ortega Alcaide, Alessandro Diodato, Arianna Menciassi, and Gastone Ciuti. 2023. "Spherical Wrist Manipulator Local Planner for Redundant Tasks in Collaborative Environments" Sensors 23, no. 2: 677. https://doi.org/10.3390/s23020677
APA StyleChiurazzi, M., Alcaide, J. O., Diodato, A., Menciassi, A., & Ciuti, G. (2023). Spherical Wrist Manipulator Local Planner for Redundant Tasks in Collaborative Environments. Sensors, 23(2), 677. https://doi.org/10.3390/s23020677