
High-Range and High-Linearity 2D Angle Measurement System for a Fast Steering Mirror

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
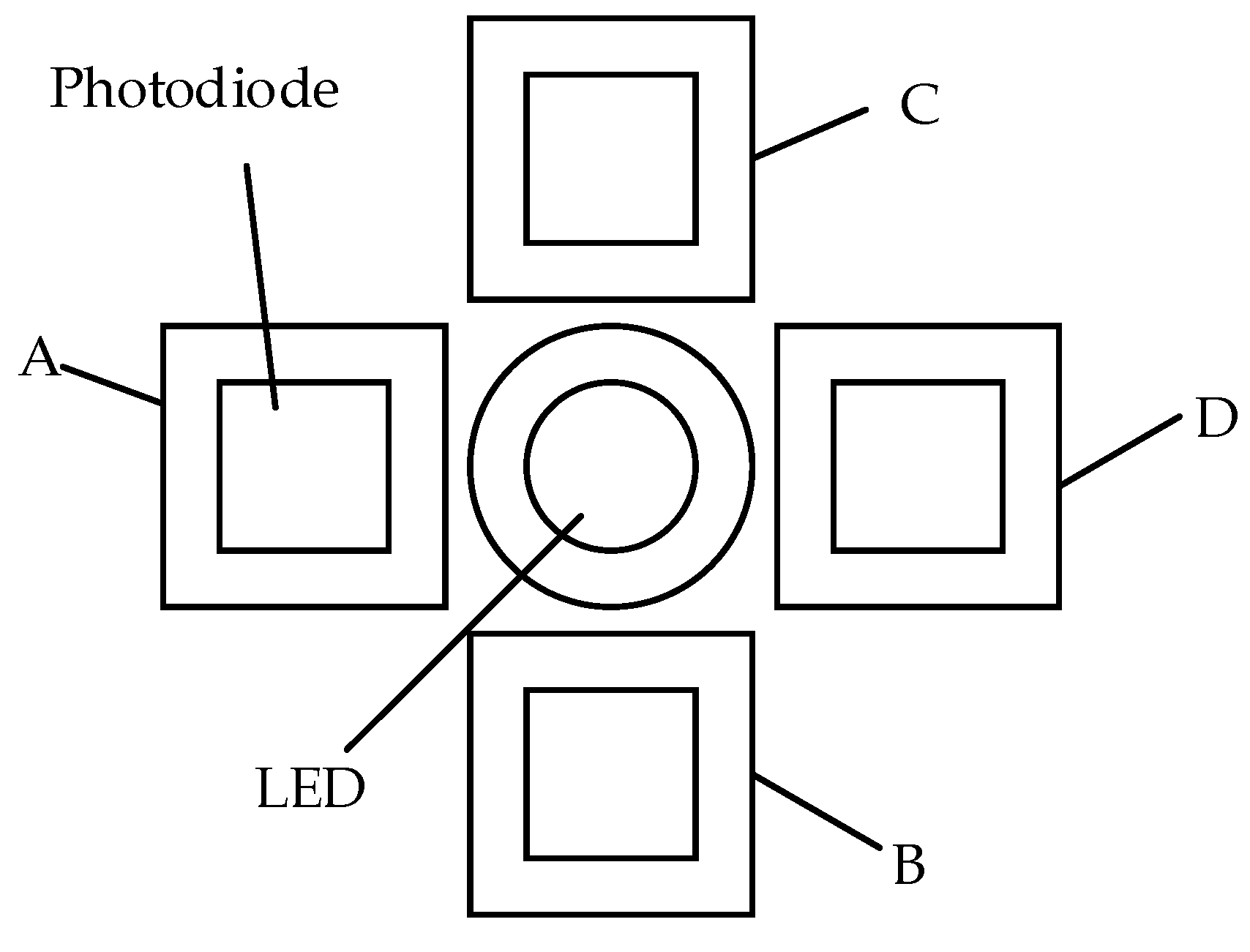
2. Deflection Angle Detection Principle
3. Establishment of a Theoretical Model for the Angle Measurement System
3.1. Diffuse Reflection Theory
3.2. Diffuse Reflection Model of Angle Measurement System
4. Experiments and Results
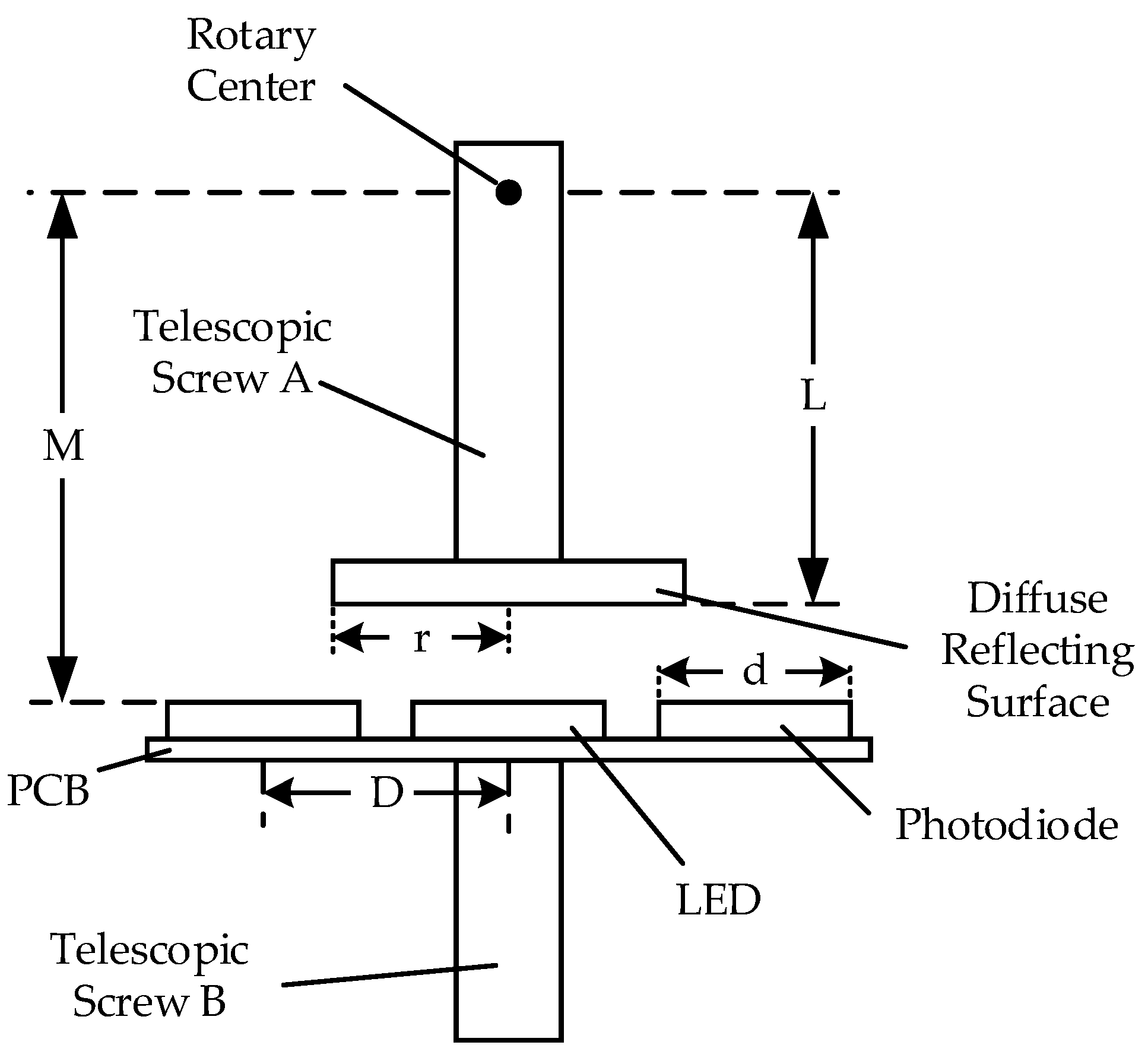
4.1. Experimental Structure of the Angle Measurement System
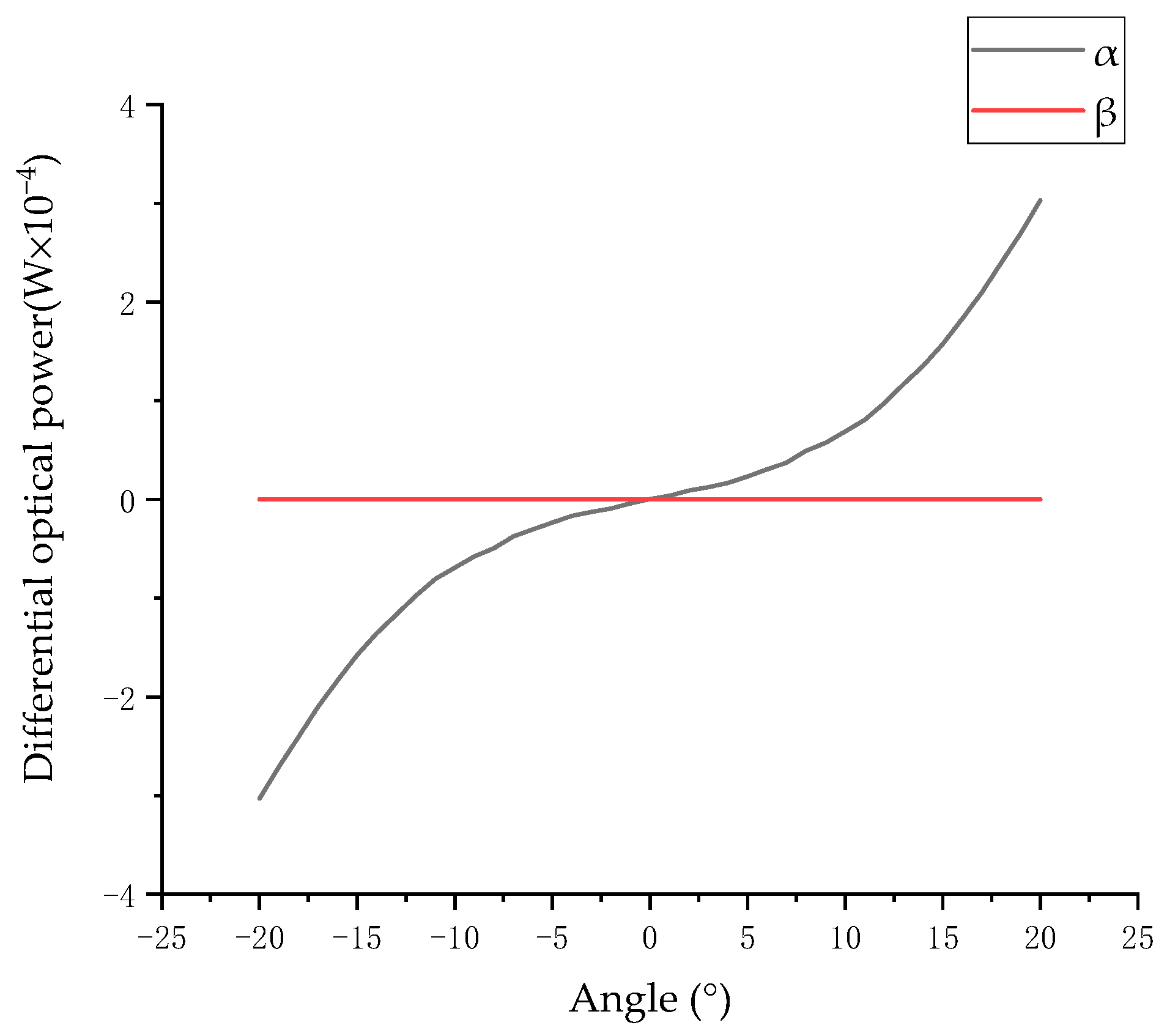
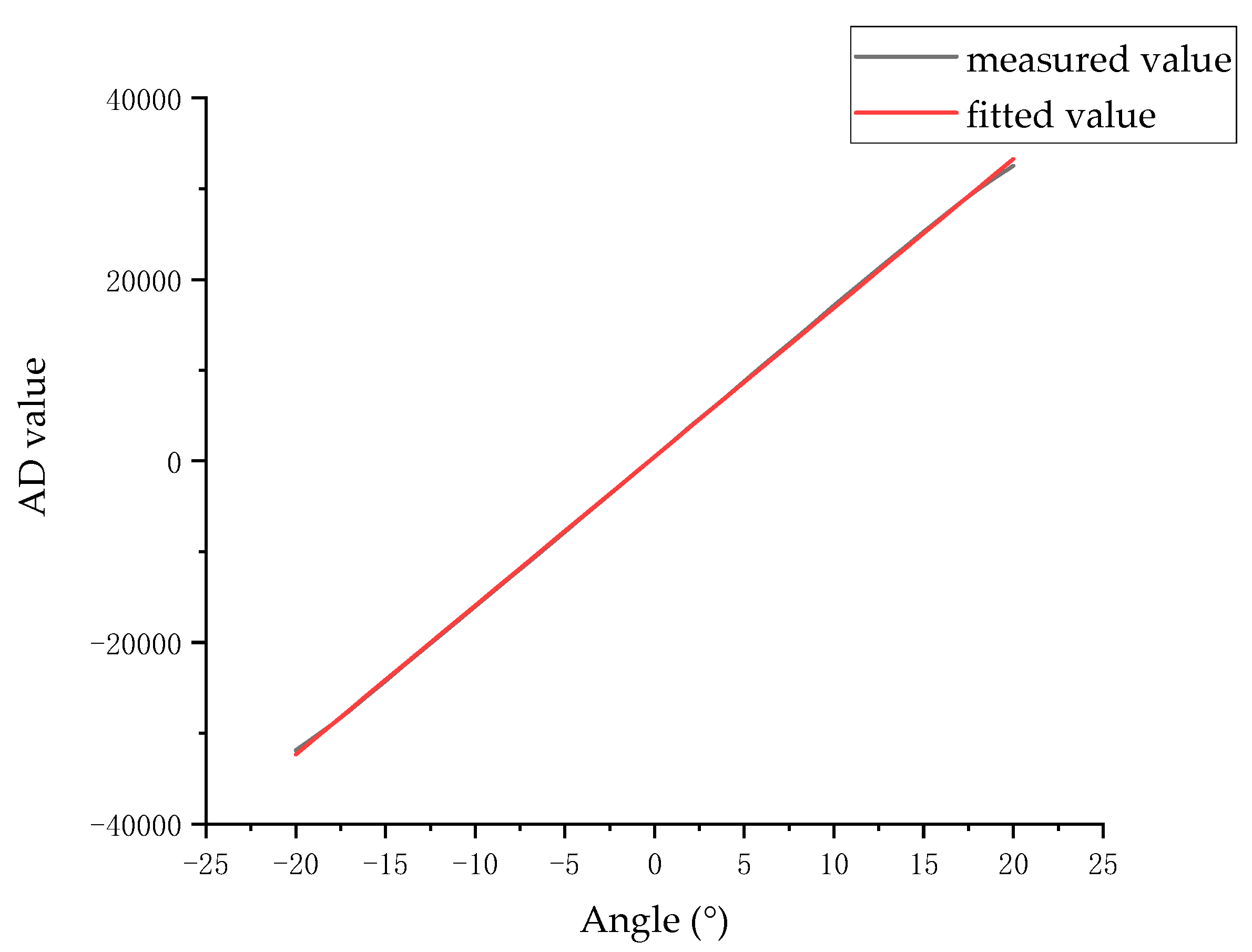
4.2. Results and Analysis of the Deflection Angle Measurement System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shinshi, T.; Shimizu, D.; Kodeki, K.; Fukushima, K. A Fast Steering Mirror Driven by Voice Coil Motors and Supported by Magnetic Suspension. In Proceedings of the 23rd International Conference on Mechatronics Technology (ICMT), Salerno, Italy, 23–26 October 2019. [Google Scholar]
- Wang, L.; Liu, X.L.; Wang, C.Y. Modeling and design of fast steering mirror in image motion compensation for backscanning step and stare imaging systems. Opt. Eng. 2019, 58, 9. [Google Scholar] [CrossRef]
- Xiantao, L.; Li, B.T.; Wang, L.; Li, J.Z.; Zhou, Z.M.; Li, C.; Zhang, B. Negative Effect Compensation of Disturbance for High-Precision Voice Coil Fast Steering Mirror. Math. Probl. Eng. 2022, 2022, 13. [Google Scholar] [CrossRef]
- Bohkman, E.; Burnashev, M.; Filatov, Y.; Pavlov, P. Implementation of the dynamic laser goniometer for noncontact measurement of angular movement. Opt. Eng. 2016, 55, 5. [Google Scholar] [CrossRef]
- Bokhman, E.; Burnashev, M.; Filatov, Y.; Pavlov, P. Results of implementation of the dynamic laser goniometer for non-contact measurement of angular movement. In Proceedings of the Conference on Electro-Optical Remote Sensing, Photonic Technologies, and Applications IX, Toulouse, France, 21–22 September 2015. [Google Scholar]
- Chen, W.; Chen, S.H.; Luo, D. Design and experimental investigations of a two-dimensional laser scanner based on piezoelectric actuators. Opt. Eng. 2015, 54, 6. [Google Scholar] [CrossRef]
- El-Gohary, M.; McNames, J. Human Joint Angle Estimation with Inertial Sensors and Validation with A Robot Arm. IEEE Trans. Biomed. Eng. 2015, 62, 1759–1767. [Google Scholar] [CrossRef] [PubMed]
- Fan, M.W.; Huang, L.H.; Li, M.; Rao, C.H. A fast high voltage driver for the piezoelectric fast steering mirror. In Proceedings of the 20th International Symposium on High Power Laser Systems and Applications (HPLS and A), Chengdu, China, 25–29 August 2014. [Google Scholar]
- Jia, X.D.; Wan, Q.H.; Yu, H.; Lu, X.R.; Zhao, C.H. Small-sized visual angular displacement measurement technology. Measurement 2019, 135, 406–412. [Google Scholar] [CrossRef]
- Konyakhin, I.; Hoang, V.P.; Artemenko, Y.; Li, R.P.; Smekhov, A. Optic-electronic system for measuring the three-dimensional angular deformation of pipe sections at large constructions. In Proceedings of the Conference on Optical Measurement Systems for Industrial Inspection IX, Munich, Germany, 22–25 June 2015. [Google Scholar]
- Padma, S.; Umesh, S.; Pant, S.; Srinivas, T.; Asokan, S. Fiber Bragg Grating based Tunable Sensitivity Goniometer. In Proceedings of the Conference on Photonic Instrumentation Engineering III, San Francisco, CA, USA, 17–18 February 2016. [Google Scholar]
- Rezende, A.; Alves, C.; Marques, I.; Silva, M.A.; Naves, E. Polymer Optical Fiber Goniometer: A New Portable, Low Cost and Reliable Sensor for Joint Analysis. Sensors 2018, 18, 4293. [Google Scholar] [CrossRef] [PubMed]
- Vikas, V.; Crane, C.D. Joint Angle Measurement Using Strategically Placed Accelerometers and Gyroscope. J. Mech. Robot. 2016, 8, 7. [Google Scholar] [CrossRef]
- Yu, H.; Jia, X.D.; Wan, Q.H.; Zhao, C.H.; Sun, Y. High-resolution angular measurement arithmetic based on pixel interpolations. Measurement 2020, 149, 5. [Google Scholar] [CrossRef]
- Fan, Y.; Ma, W.L.; Jiang, P.; Huang, J.L.; Chen, K.W.; Pan, N.A. Improving Angular Accuracy of a Scanning Mirror Based on Error Modeling and Correction. Sensors 2019, 19, 367. [Google Scholar] [CrossRef]
- Lin, D.; Wu, Y.M.; Zhu, F. Research on Precision Tracking on Fast Steering Mirror and Control Strategy. In Proceedings of the International Conference on Power and Energy Engineering (ICPEE), Ottawa, ON, Canada, 13–15 September 2017. [Google Scholar]
- OIM101-One Inch FSM. Available online: https://www.opticsinmotion.net/OIM101%20INFO%20Update%2010-08-10.pdf (accessed on 10 August 2010).
- Wu, X.; Chen, S.; Chen, W.; Yang, M.; Fu, W. Large angle and high linearity two-dimensional laser scanner based on voice coil actuators. Rev. Sci. Instrum. 2011, 82, 105103. [Google Scholar] [CrossRef] [PubMed]
- Ni, Y.X.; Wu, J.B.; San, X.G.; Gao, S.J.; Ding, S.H.; Wang, J.; Wang, T. Deflection angle detecting system for the large-angle and high-linearity fast steering mirror using quadrant detector. Opt. Eng. 2018, 57, 9. [Google Scholar] [CrossRef]
- Hung, S.K.; Chung, Y.H.; Chen, C.L.; Chang, K.H. Optoelectronic Angular Displacement Measurement Technology for 2-Dimensional Mirror Galvanometer. Sensors 2022, 22, 872. [Google Scholar] [CrossRef]
- Shan, M.G.; Min, R.; Zhong, Z.; Wang, Y.; Zhang, Y.B. Differential reflective fiber-optic angular displacement sensor. Opt. Laser Technol. 2015, 68, 124–128. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, B.; Lv, Y.; Liu, L.; Liu, Y. High-Range and High-Linearity 2D Angle Measurement System for a Fast Steering Mirror. Sensors 2023, 23, 9192. https://doi.org/10.3390/s23229192
Du B, Lv Y, Liu L, Liu Y. High-Range and High-Linearity 2D Angle Measurement System for a Fast Steering Mirror. Sensors. 2023; 23(22):9192. https://doi.org/10.3390/s23229192
Chicago/Turabian StyleDu, Boshi, Yong Lv, Lishuang Liu, and Yang Liu. 2023. "High-Range and High-Linearity 2D Angle Measurement System for a Fast Steering Mirror" Sensors 23, no. 22: 9192. https://doi.org/10.3390/s23229192
APA StyleDu, B., Lv, Y., Liu, L., & Liu, Y. (2023). High-Range and High-Linearity 2D Angle Measurement System for a Fast Steering Mirror. Sensors, 23(22), 9192. https://doi.org/10.3390/s23229192