

Iterative-Based Impact Force Identification on a Bridge Concrete Deck




Abstract
:1. Introduction
- It is shown that introducing a low-pass filter to the Landweber-based impact reconstruction can improve the reconstruction precision. The idea behind this introduction relies on the fact that ill-posedness of the reconstruction problem leads to sensitivity to measurement noises. Therefore, as will be discussed, filtering the high-frequency contents in the response signal can benefit the regularization problem and hence the reconstruction precision.
- A standardized accuracy error metric is utilized that improves the evaluation of the reconstruction validity. This metric regards both the correlation and peak error and hence can lead to more accurate evaluation than some other error metrics exploited in the literature.
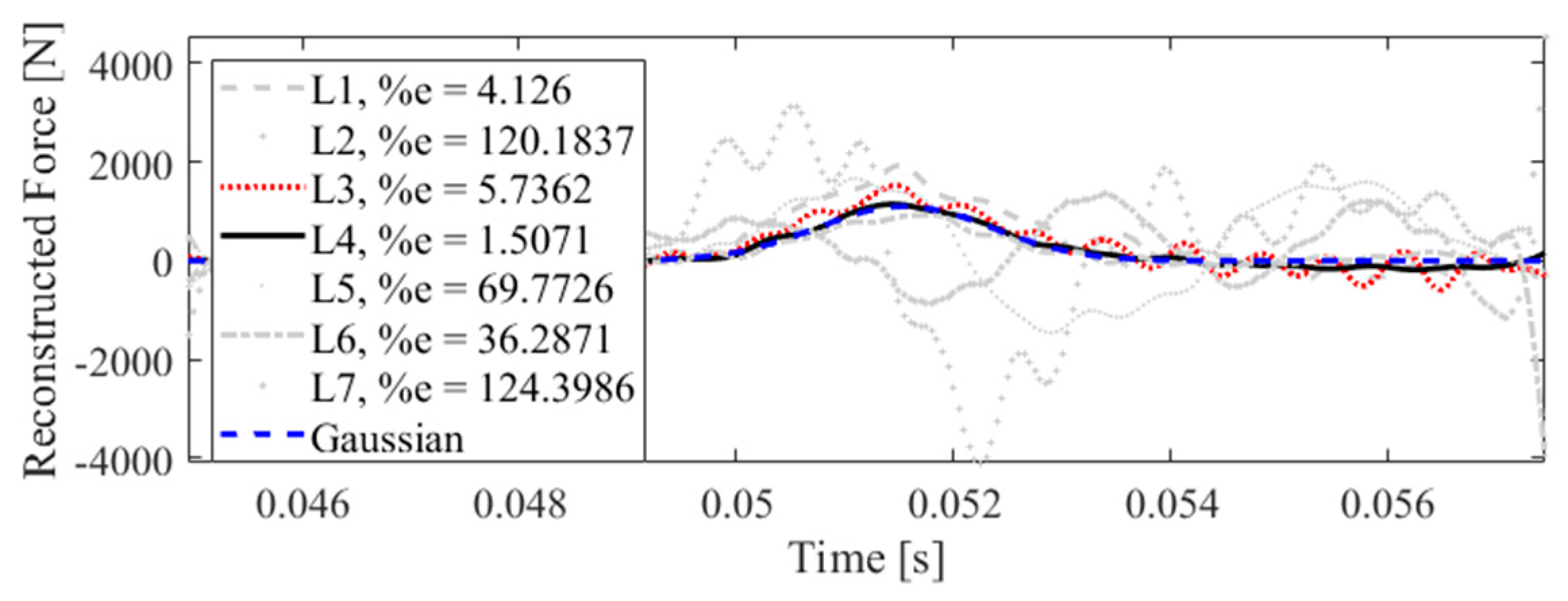
- The impact localization can be performed in an automated manner by using a proposed Gaussian profile. This idea relies on the fact that the overall shape of an impact force can be considered similar to a Gaussian profile. Even in the presence of damage, some local fluctuations will be added to this global impact profile [31,32]. We believe that the proposed Gaussian profile matches the global shape and impact force more precisely compared with the half-sine signal employed in the literature [33,34].
2. Identification of the Impact Force
- Phase 1: localizing the impact force;
- Phase 2: reconstruction of the impact force time–history.
2.1. Impact Force Location
2.2. Impact Force Time–History
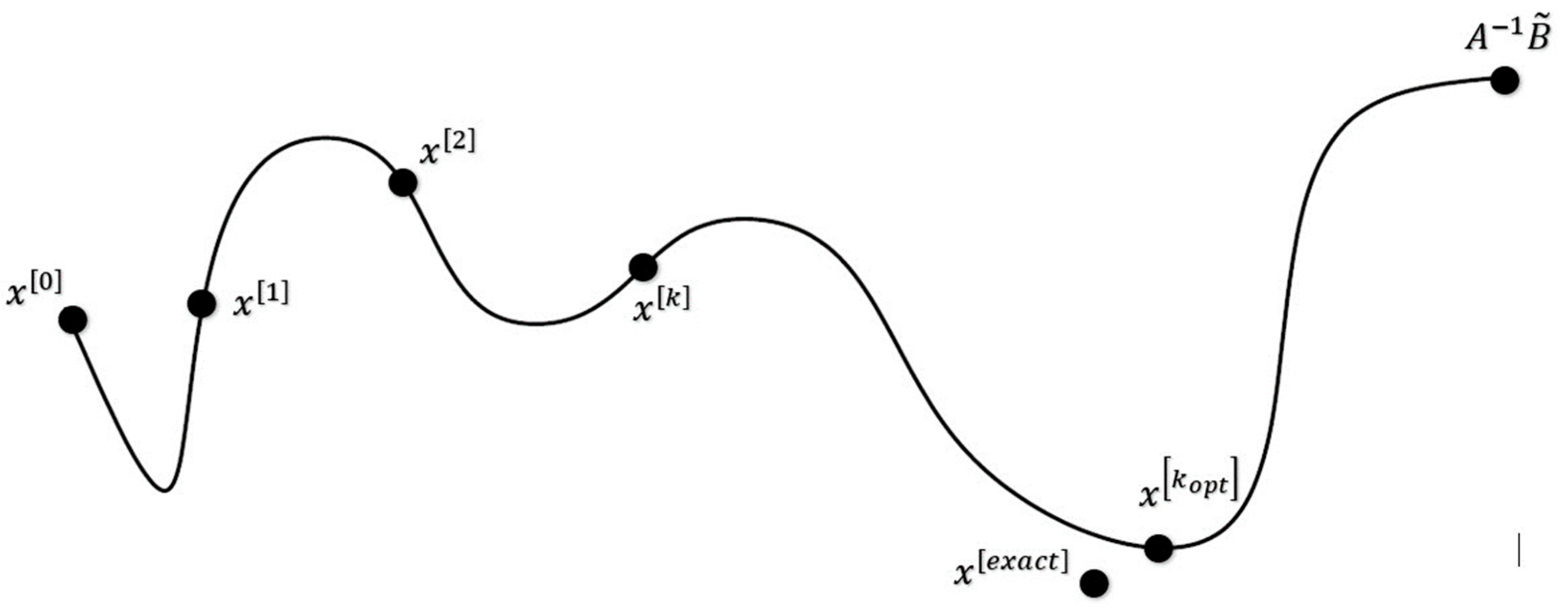
2.3. Landweber Regularization
- Direct approach, including Tikhonov and TSVD methods;
- Iterative approach, such as Landweber and Krylov subspace methods.
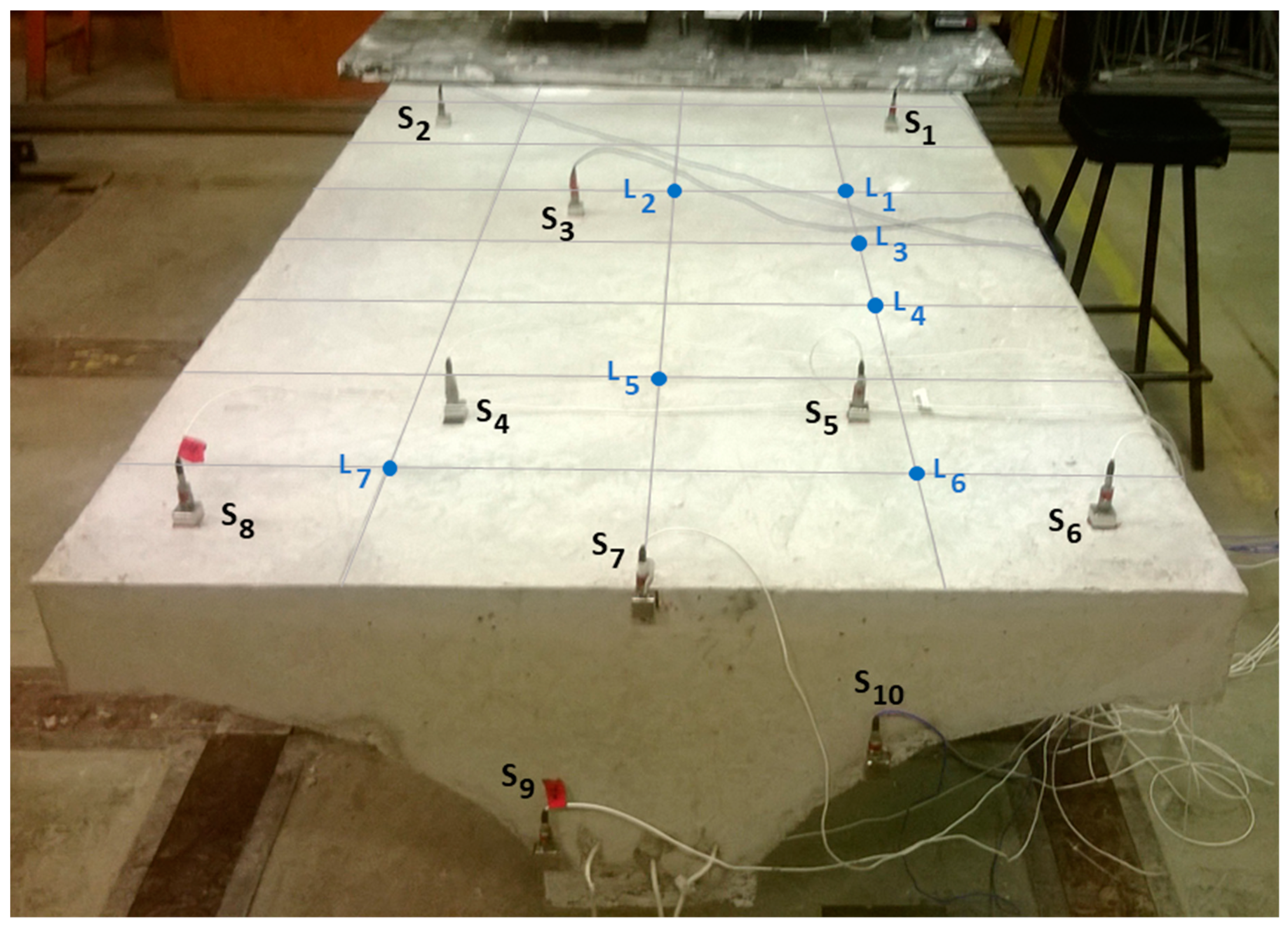
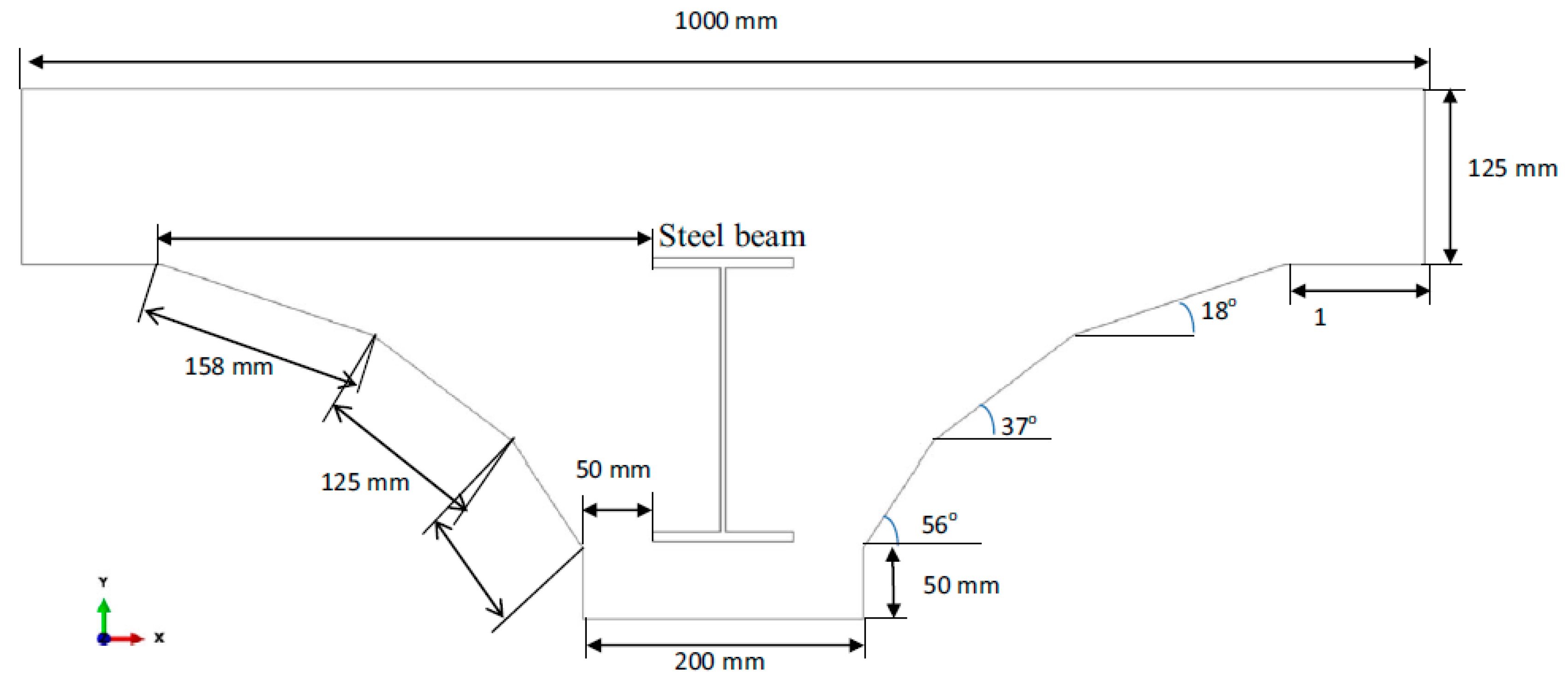
3. Experimental Setup
4. Results and Discussion
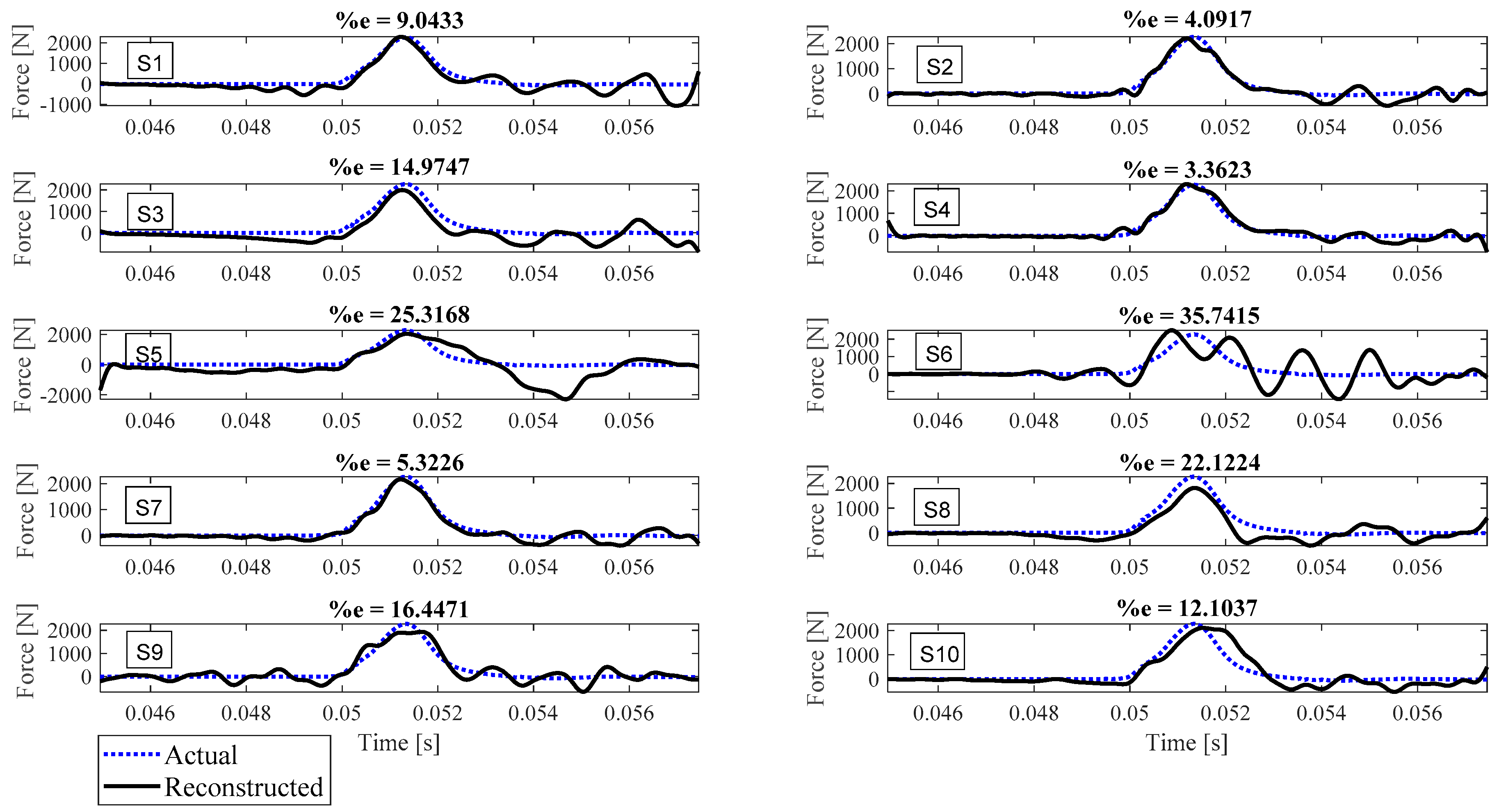
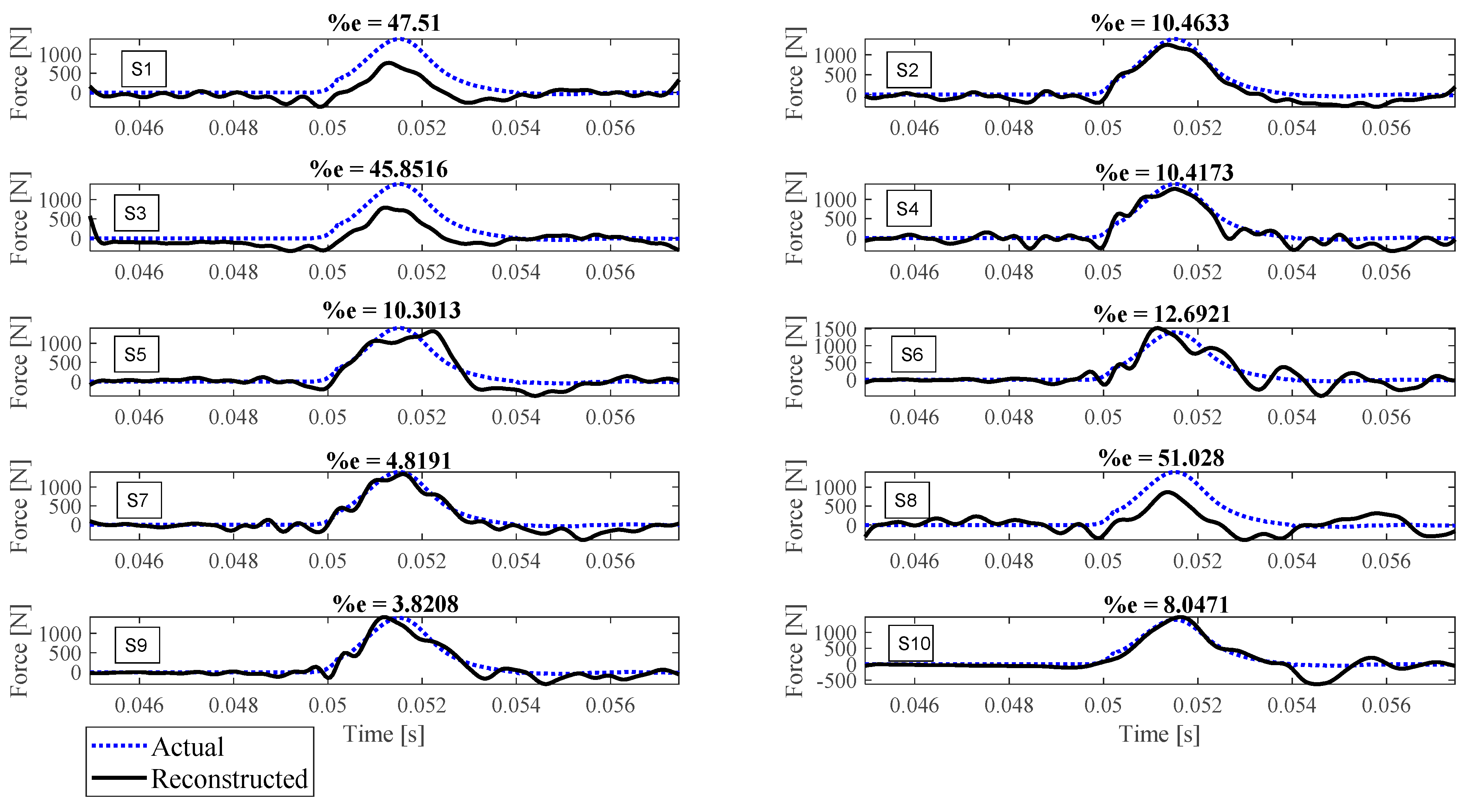
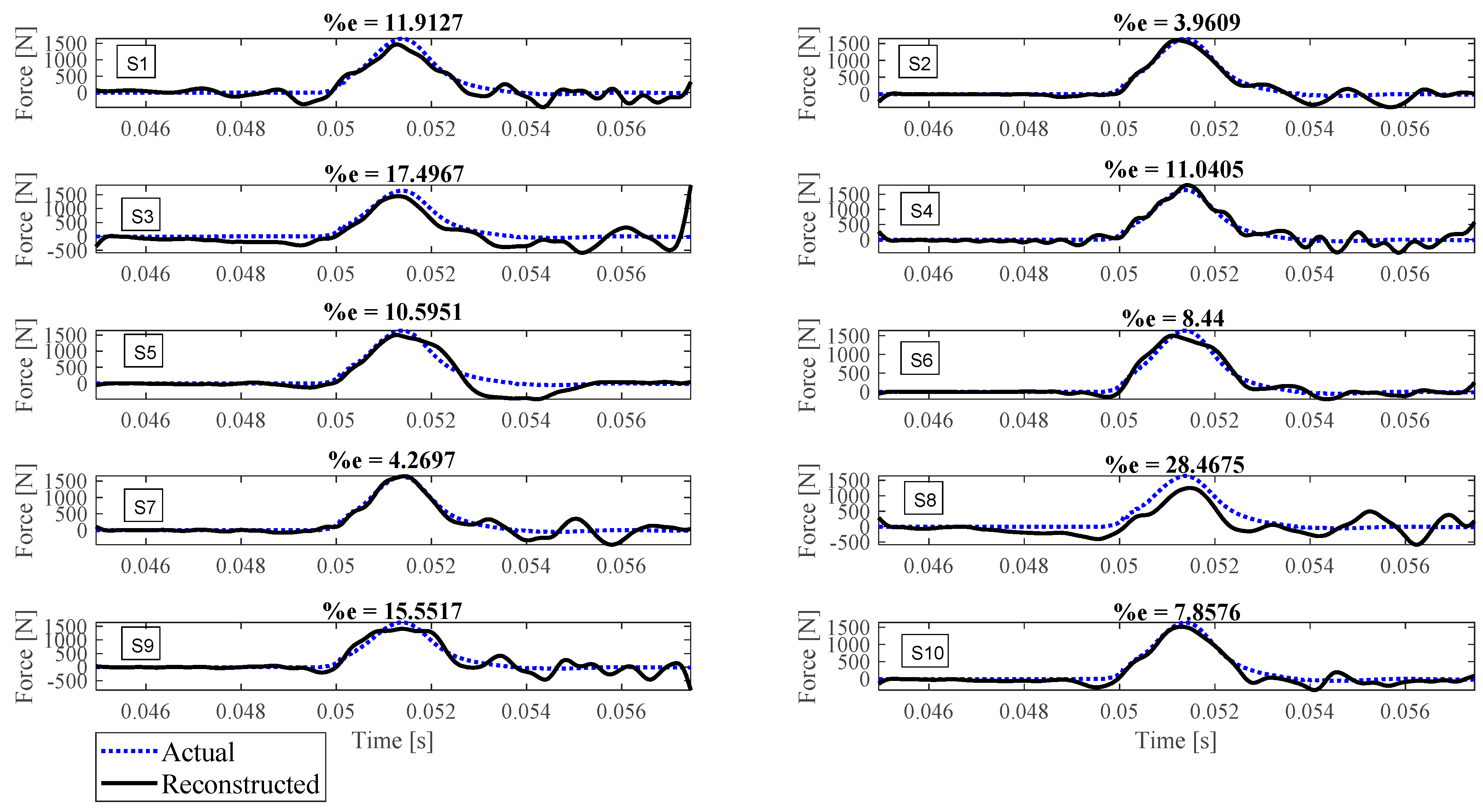
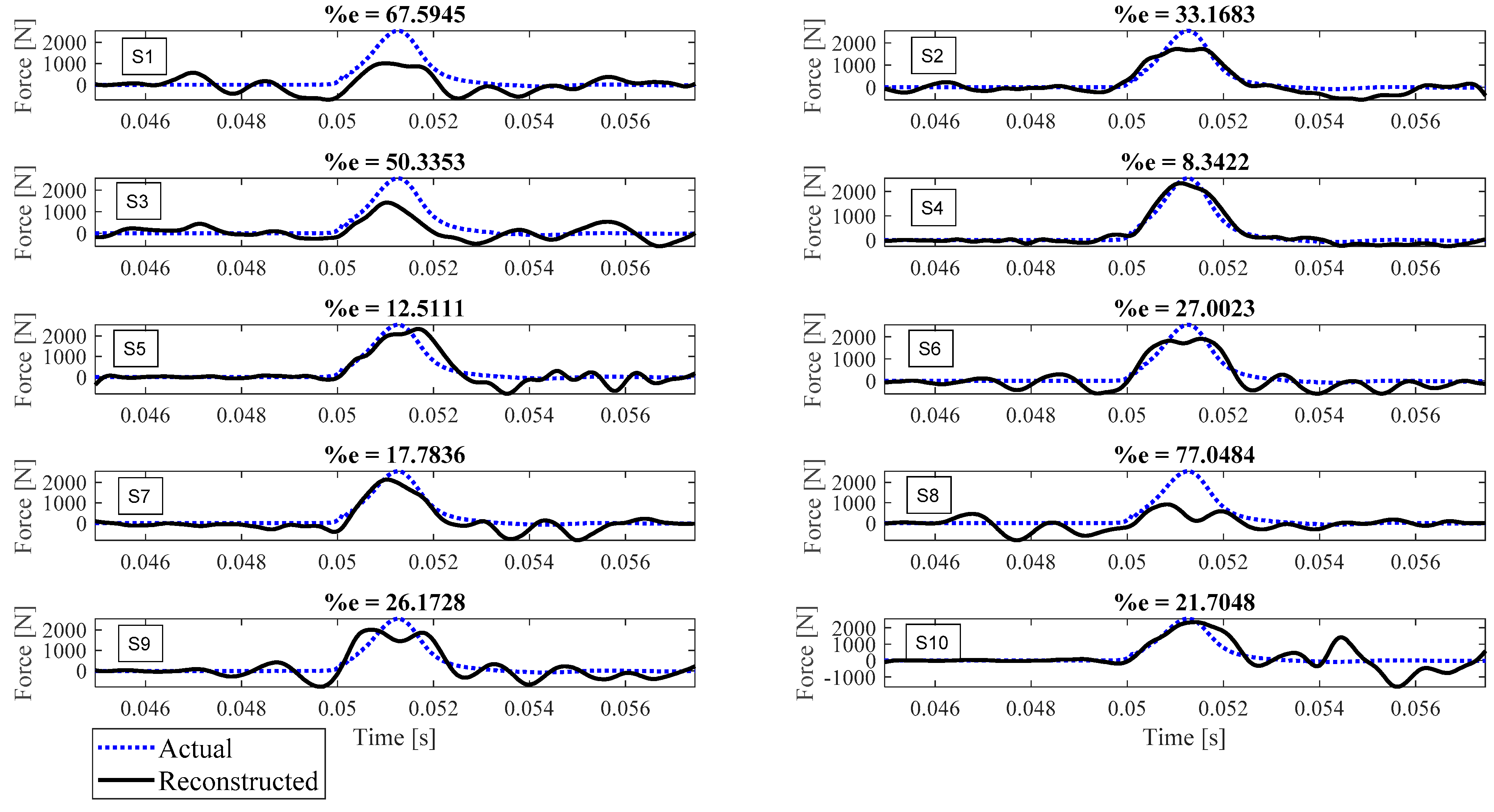
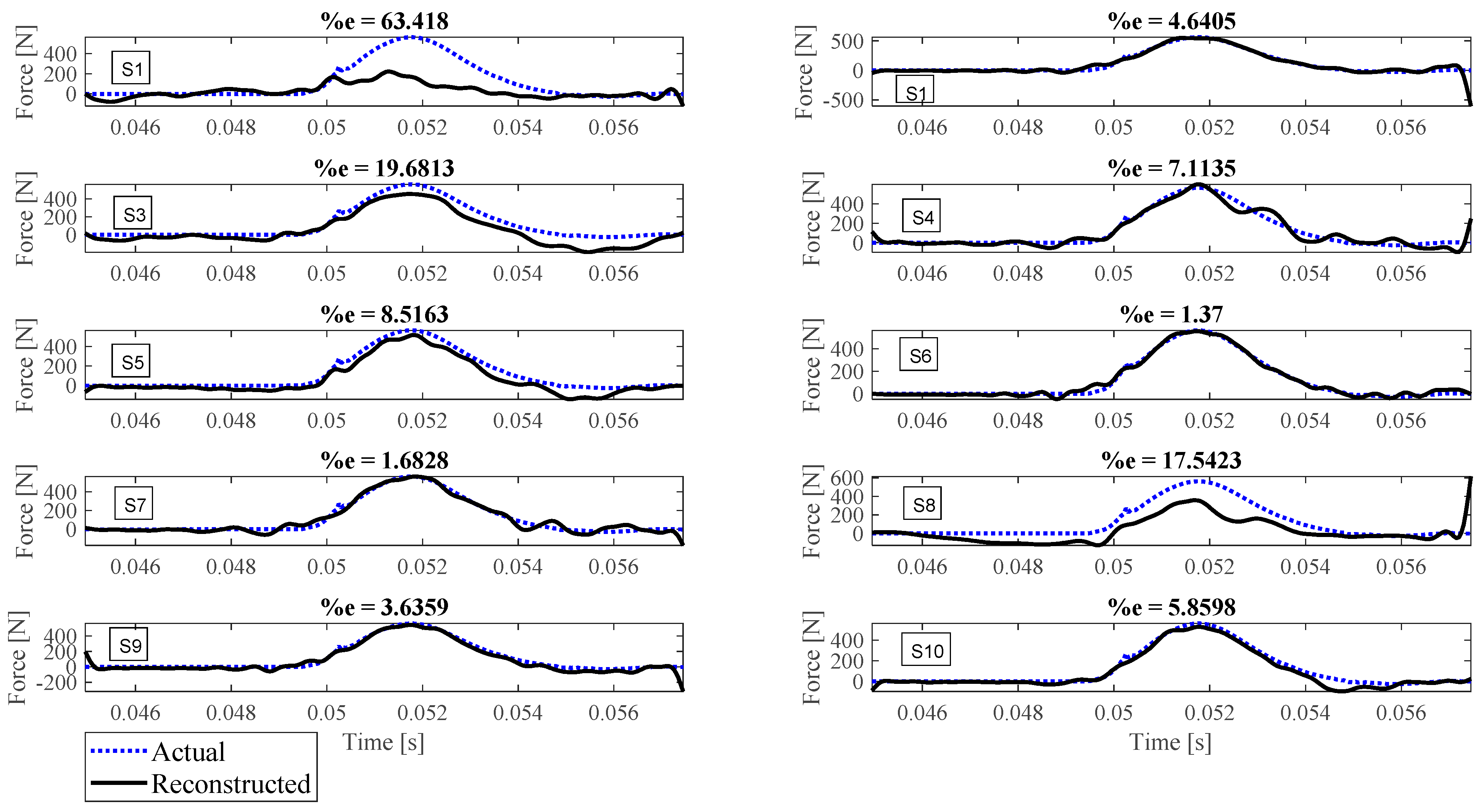
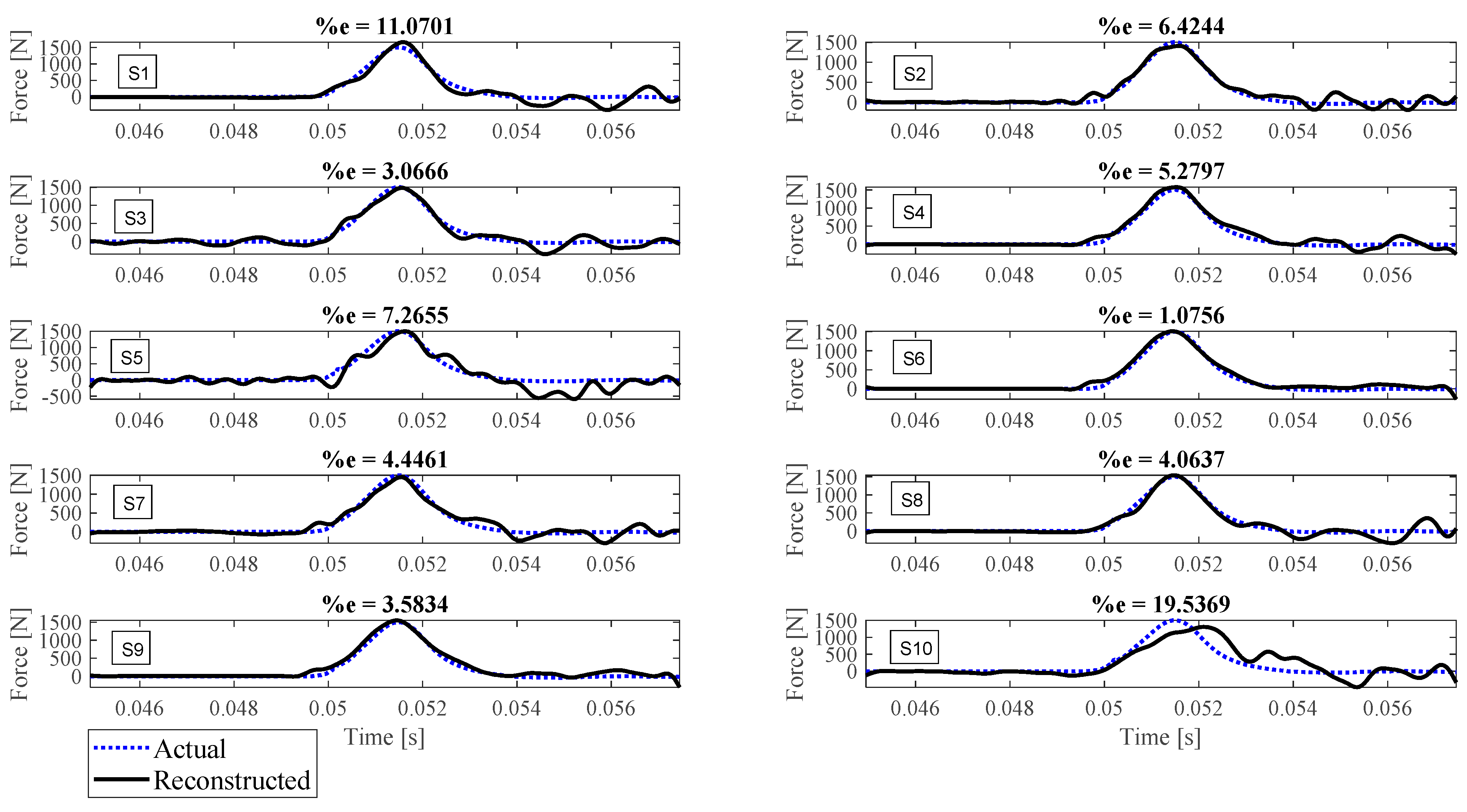
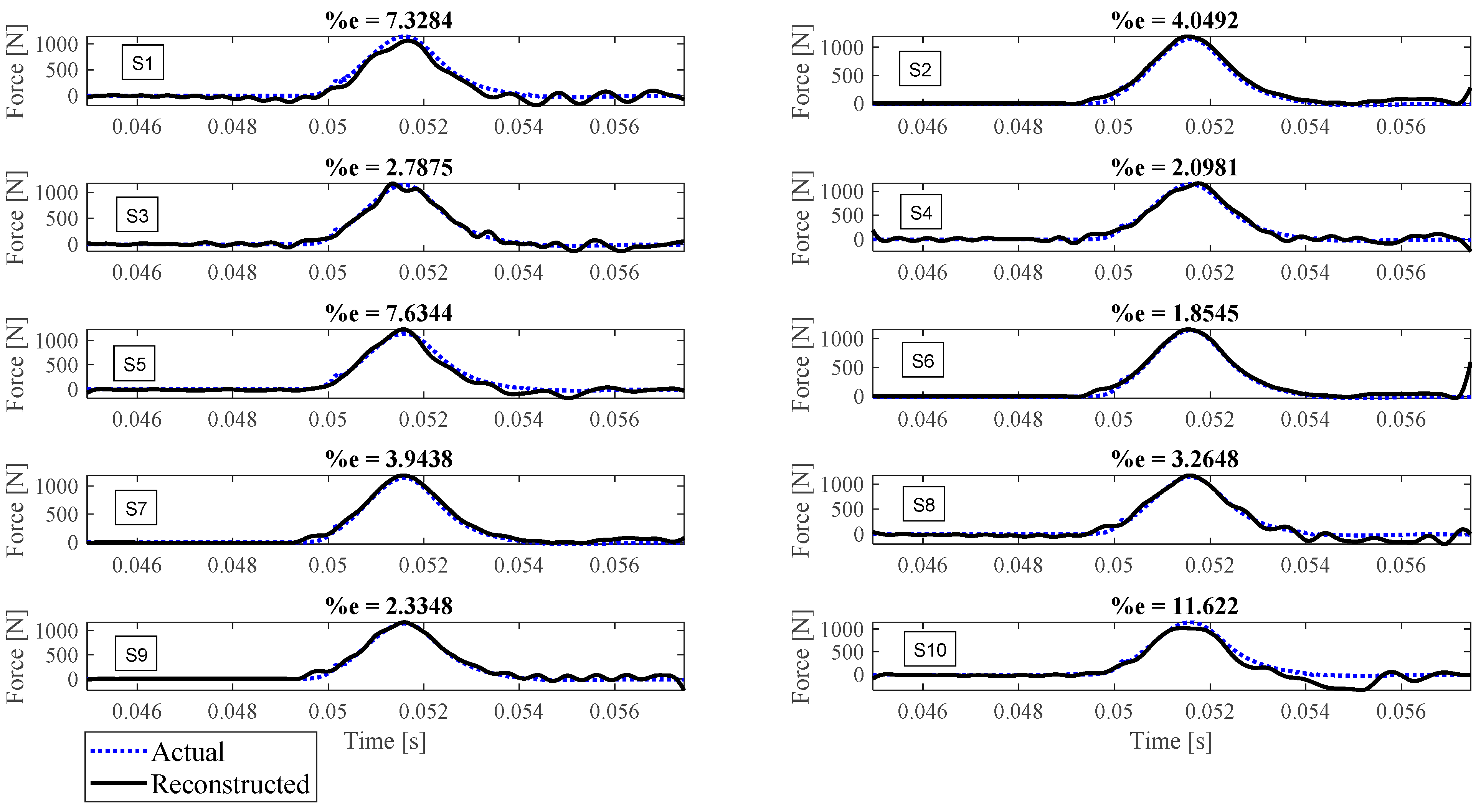
4.1. Discussion on Impact Force Reconstruction
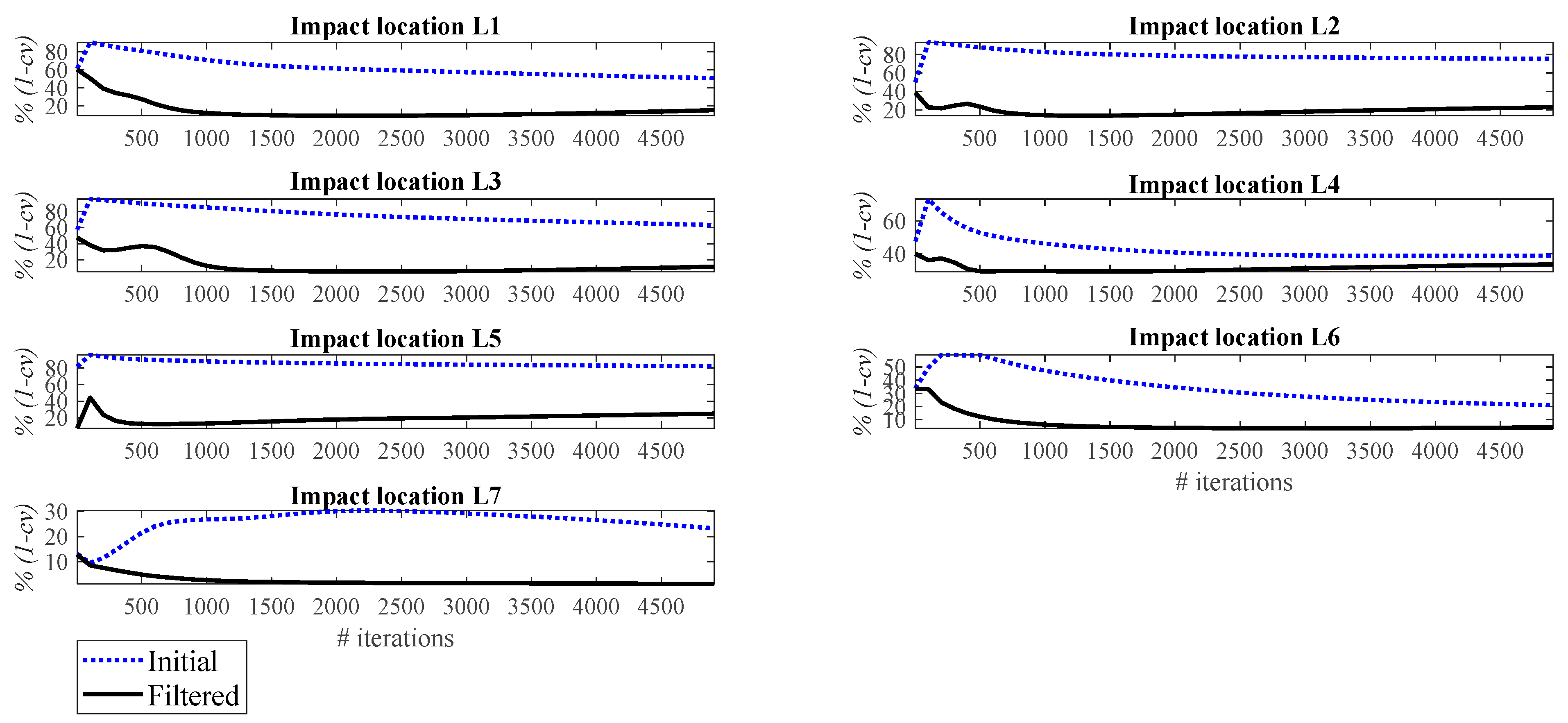
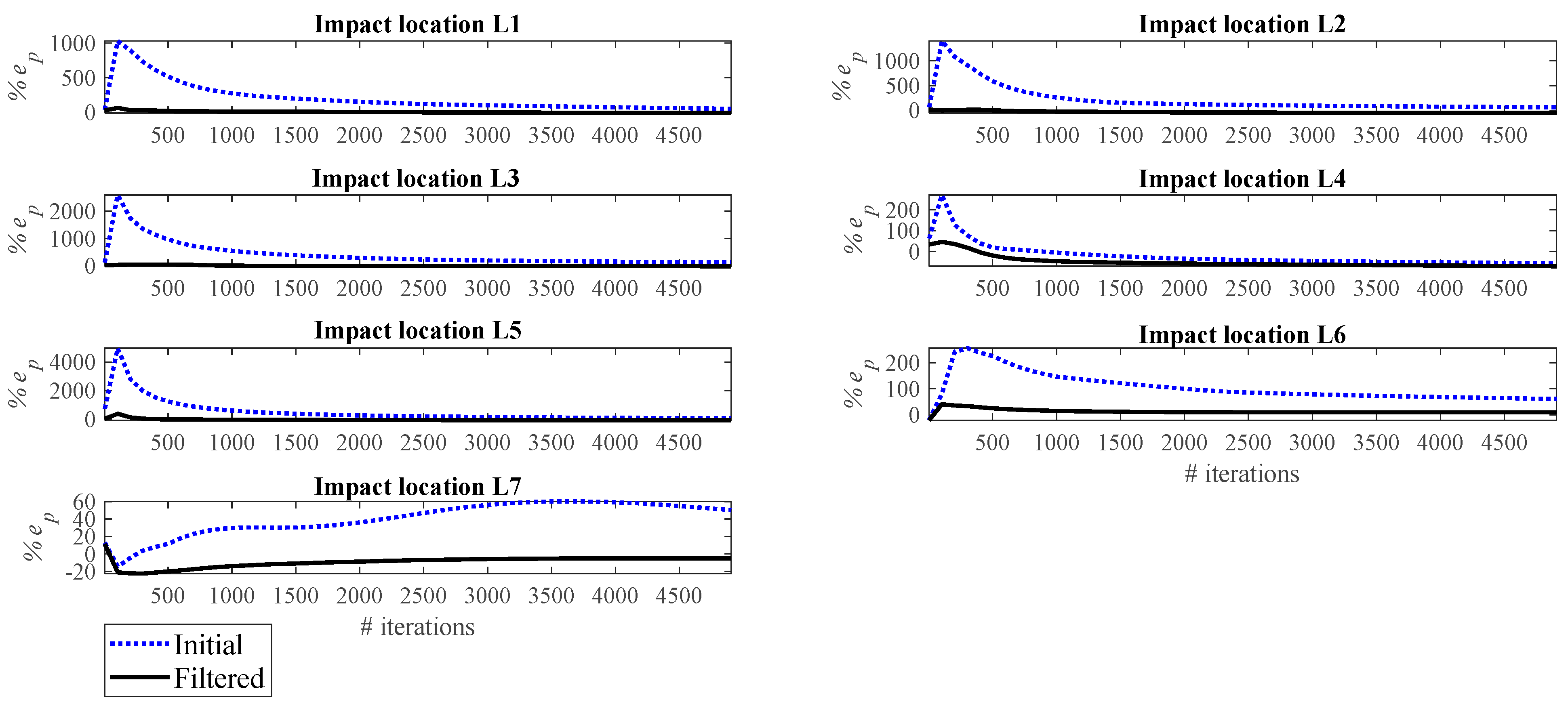
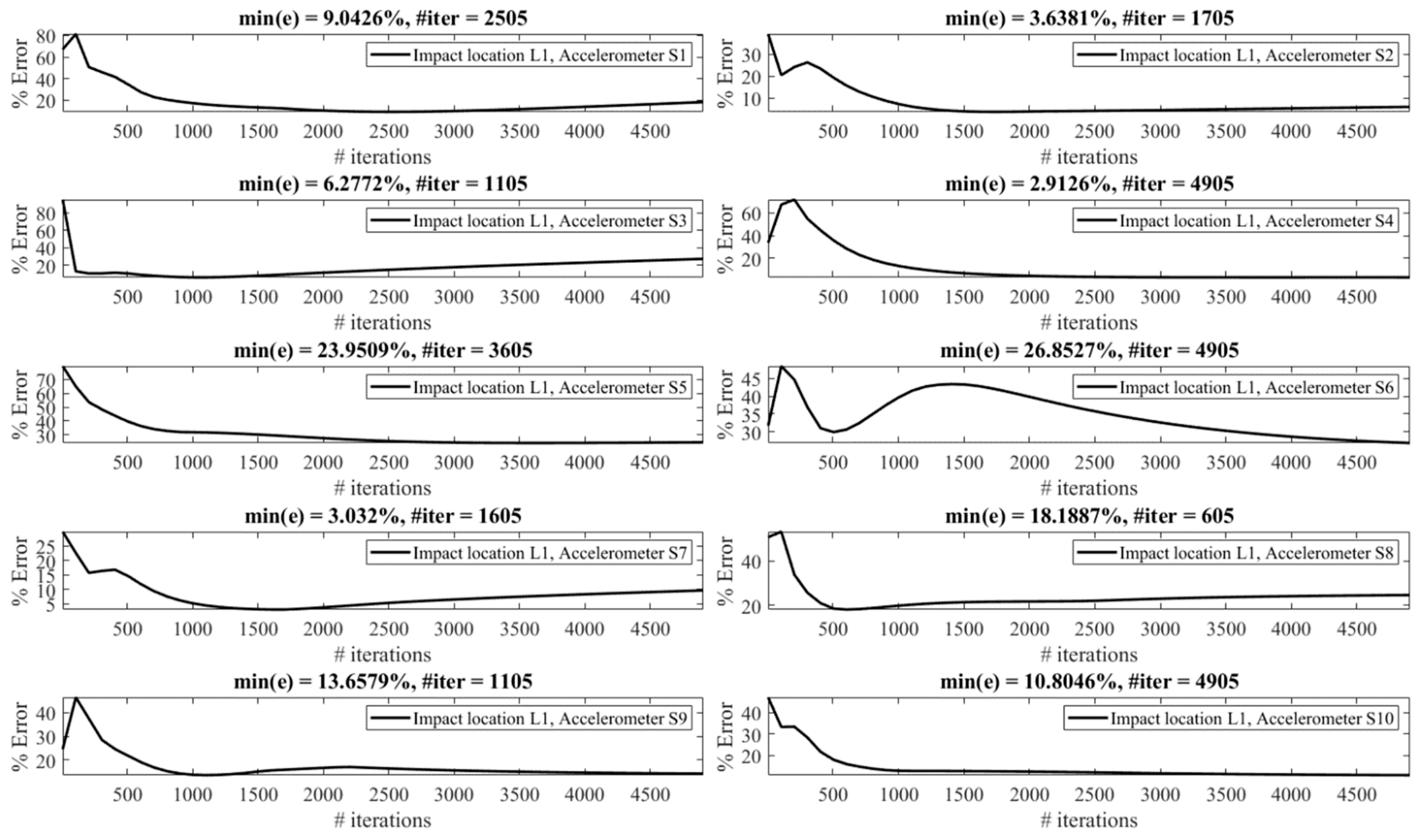
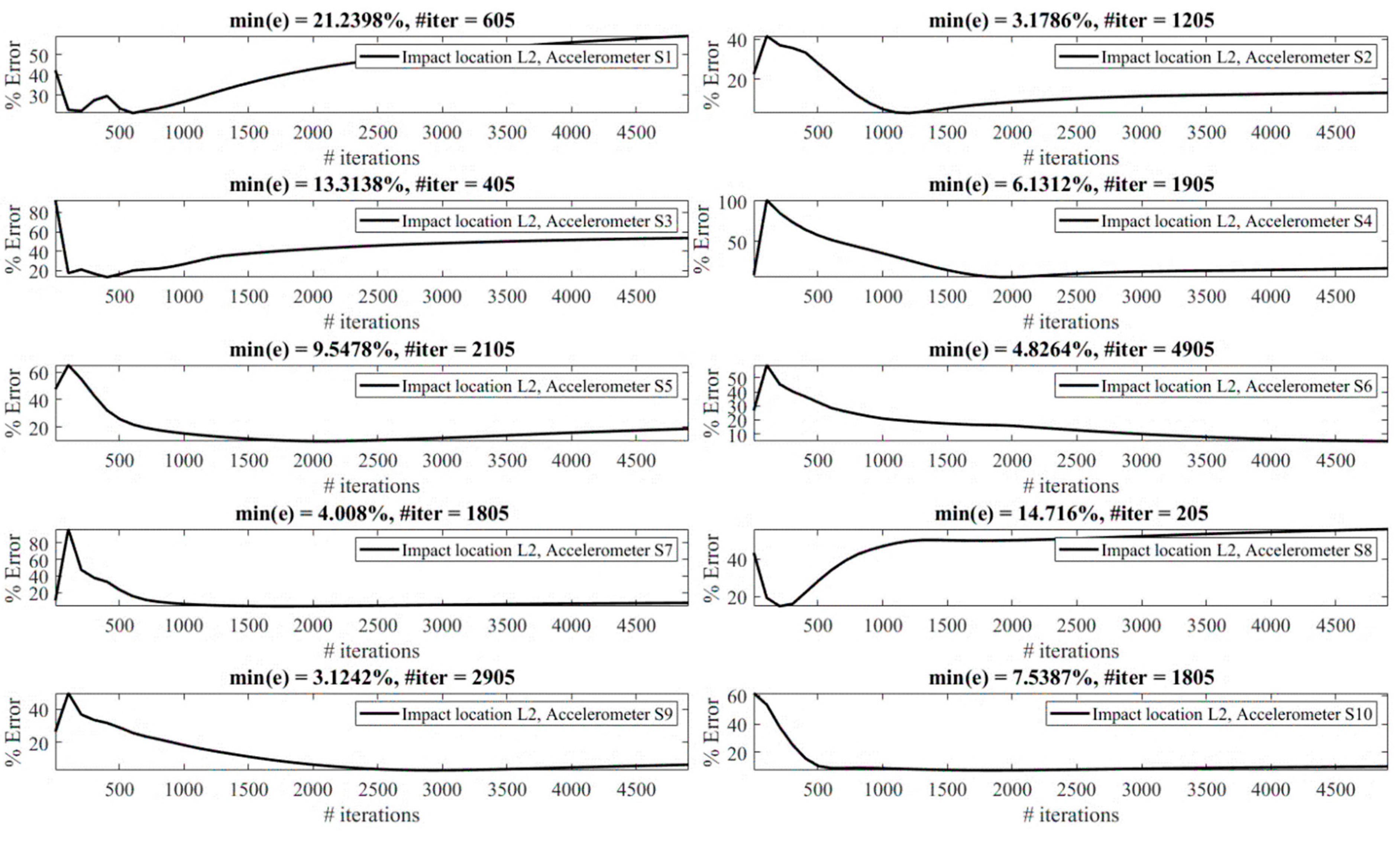
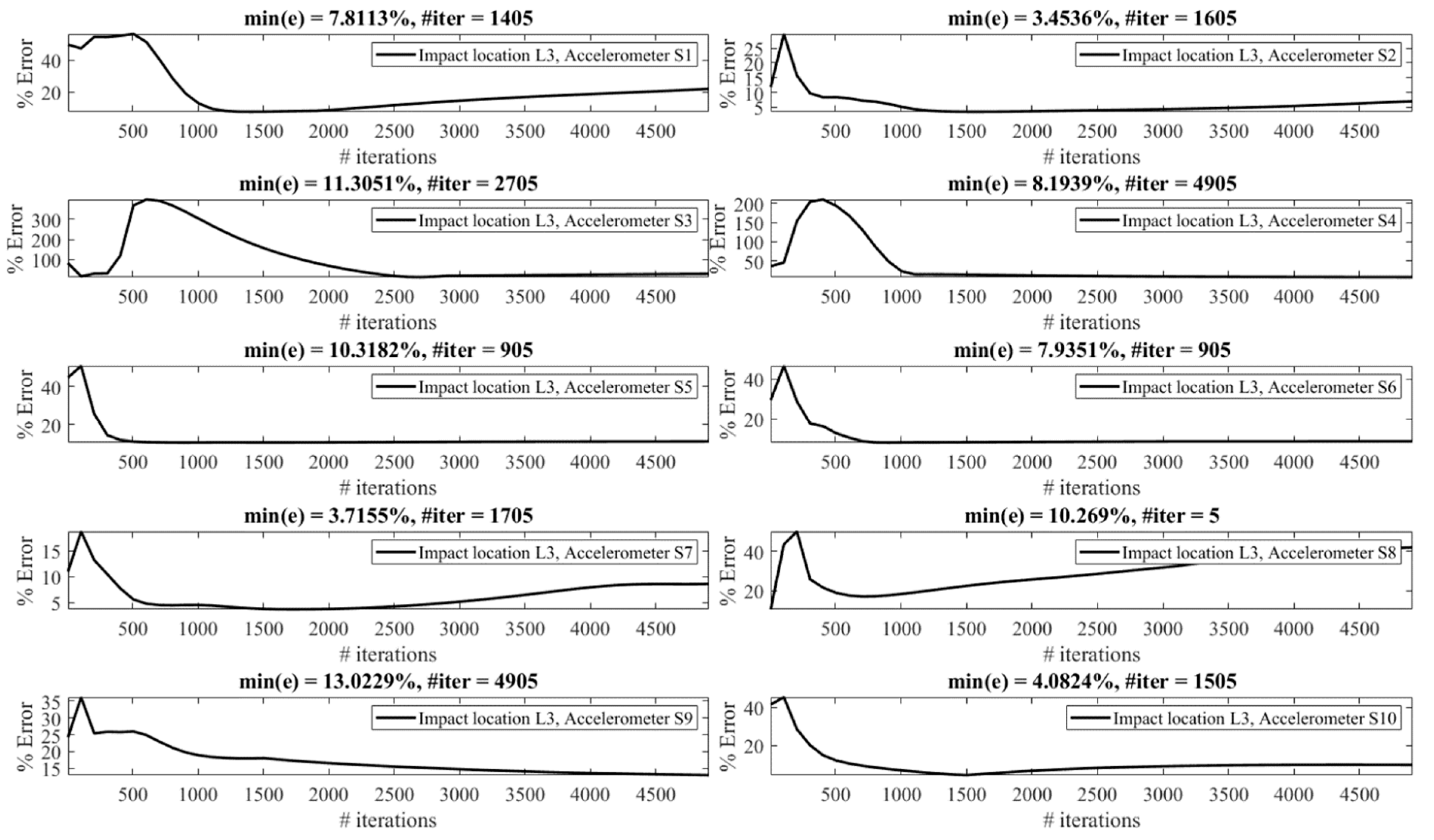
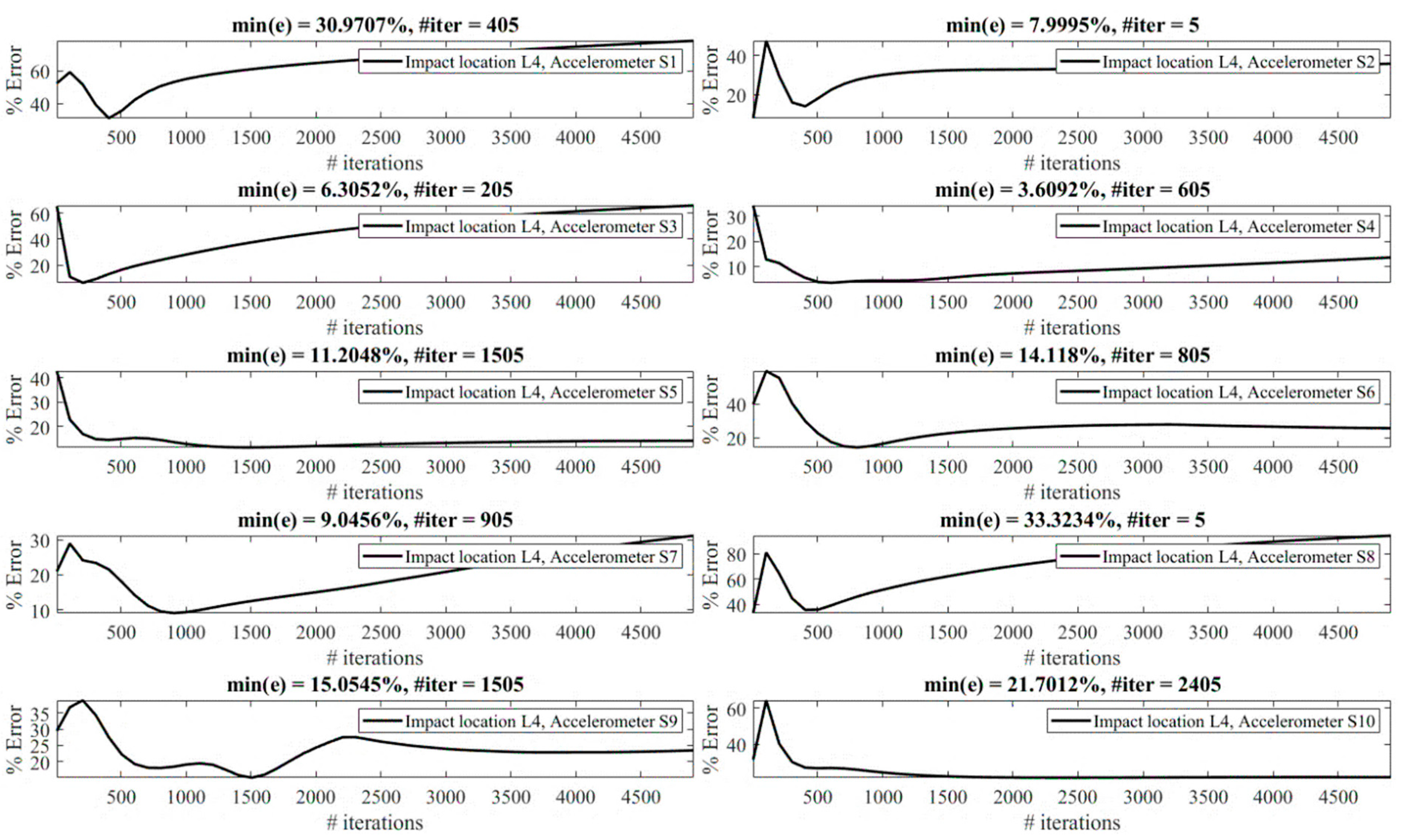
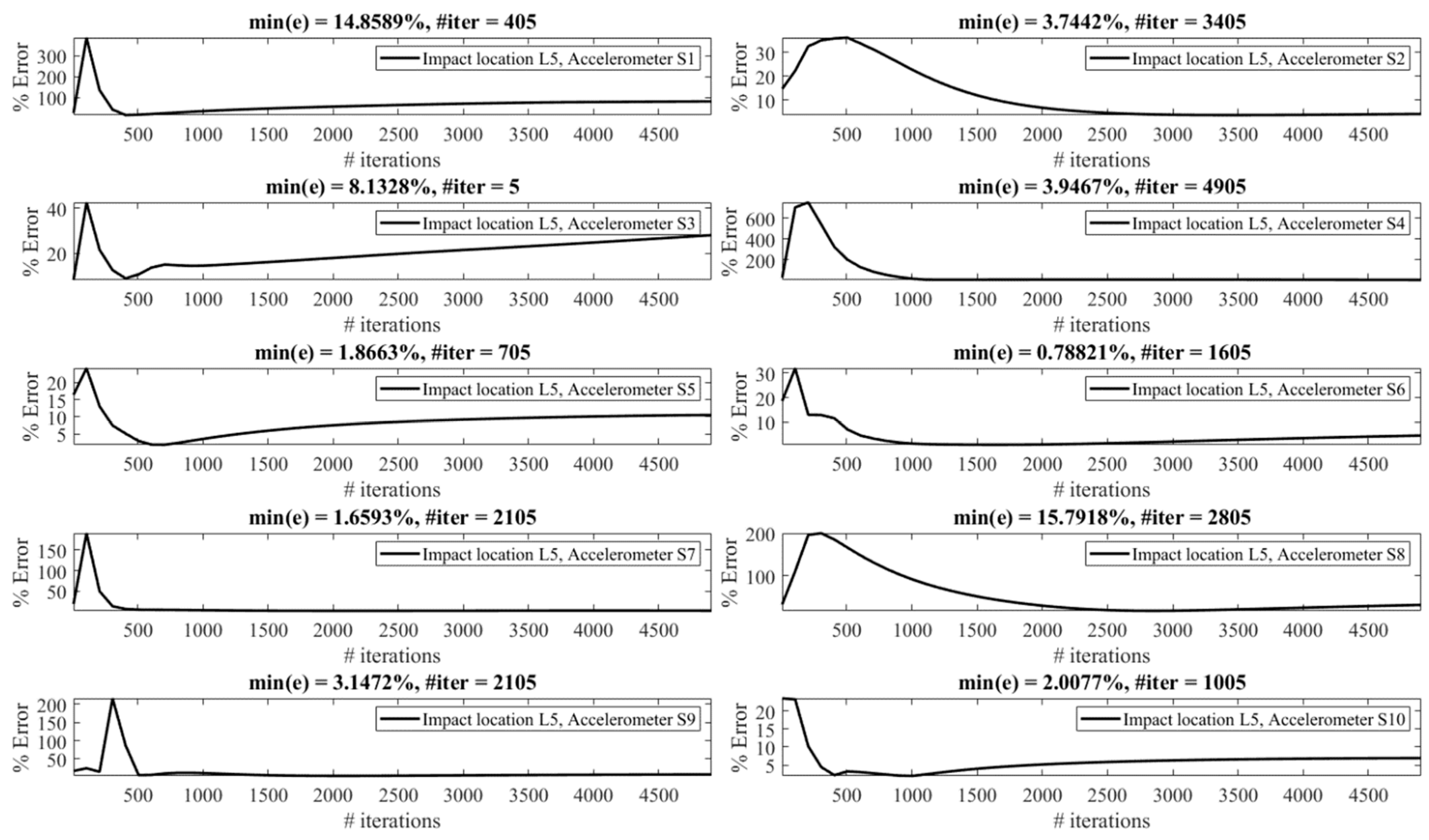
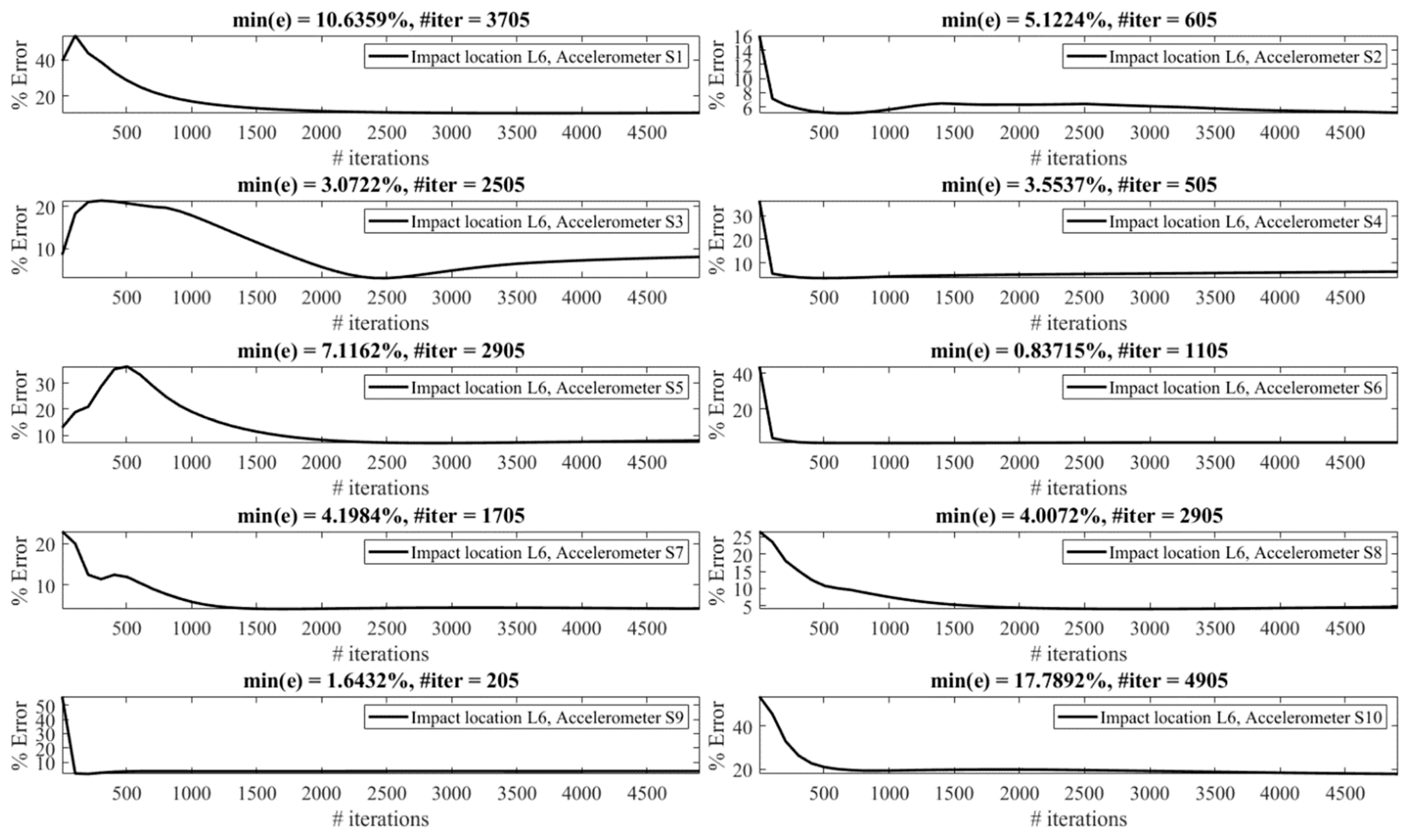
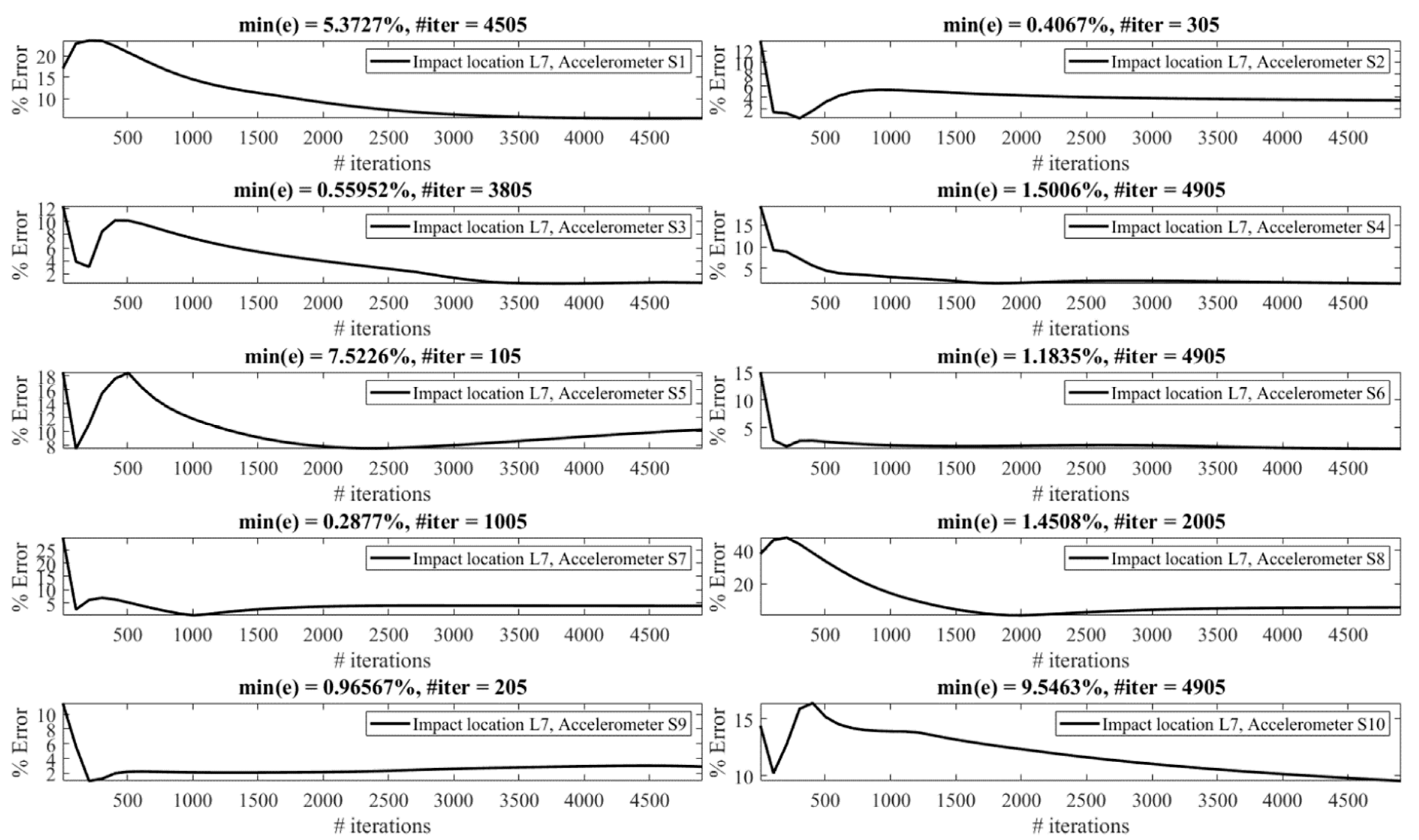
4.2. Discussion on Landweber Regularization
- Scenario 1: Pre-made tests can be exploited to obtain the optimal value of the number of iterations for each combination of the impact location and measurement point, as performed in this section. Consequently, the most precise reconstruction can be achieved, which can benefit applications that rely on high reconstruction accuracy.
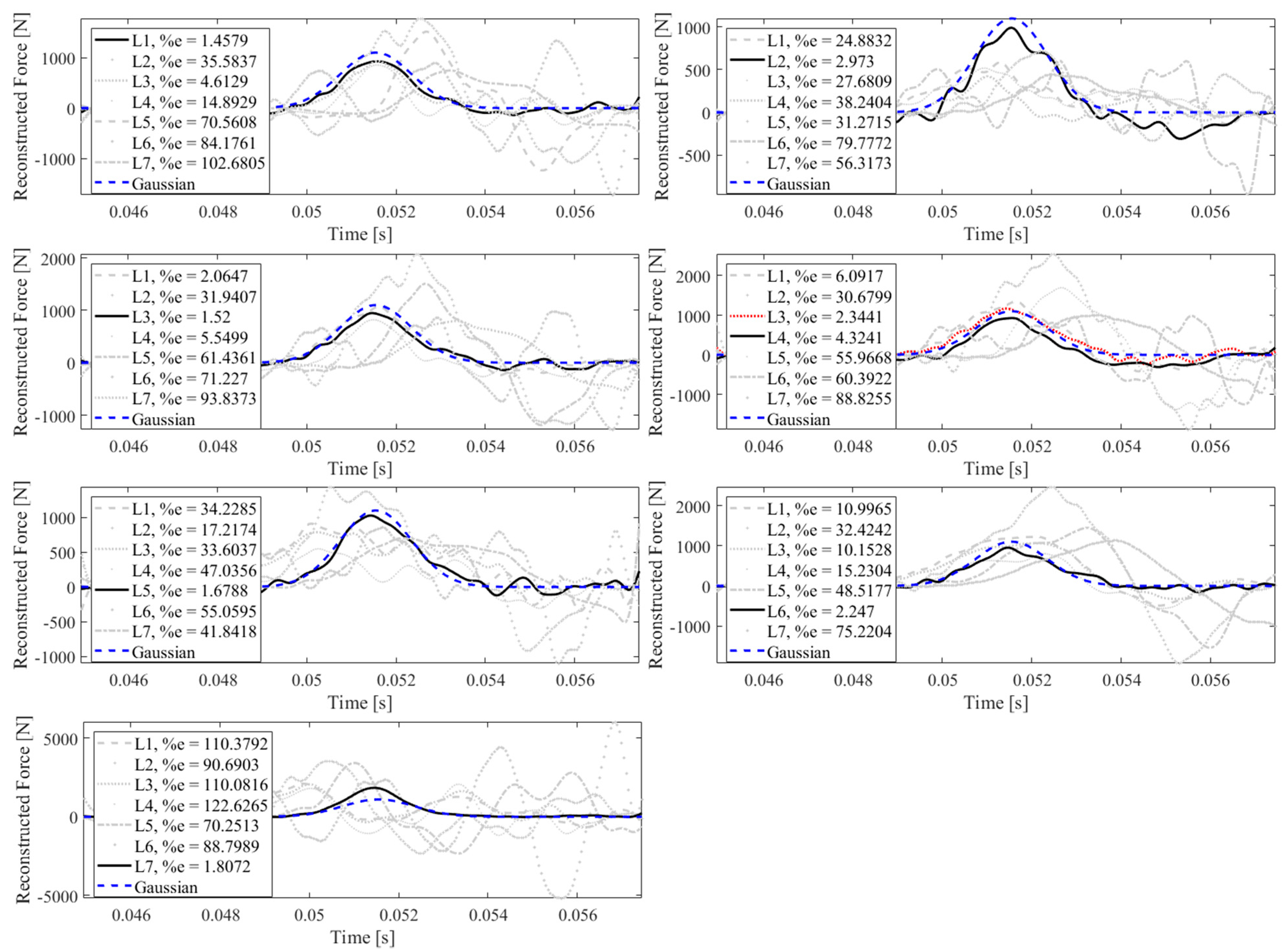
- Scenario 2: A specific iteration number can be employed for all possible combinations of the impact location and measurement point, as performed in Section 4.1. Roughly speaking, this can be conducted especially when there is a relative enough number of sensors available. More precisely, as presented in Table 1, for each impact location there exists at least one sensor that yields the reconstruction error of less than 10%. Although it might not be the most accurate reconstruction possible, this level of accuracy is acceptable in many applications.
4.3. Discussion on Impact Localization
4.4. Discussion on Sensor Placement
4.5. Discussion on Real-World Applicability
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sadeghi, F.; Mousavi, M.; Zhu, X.; Rashidi, M.; Samali, B.; Gandomi, A.H. Damage Detection of Composite Beams via Variational Mode Decomposition of Shear-Slip Data. J. Struct. Eng. 2023, 149, 04022226. [Google Scholar] [CrossRef]
- Martucci, D.; Civera, M.; Surace, C. Bridge monitoring: Application of the extreme function theory for damage detection on the I-40 case study. Eng. Struct. 2023, 279, 115573. [Google Scholar] [CrossRef]
- Barke, D.; Chiu, W.K. Structural health monitoring in the railway industry: A review. Struct. Health Monit. 2005, 4, 81–93. [Google Scholar] [CrossRef]
- Vagnoli, M.; Remenyte-Prescott, R.; Andrews, J. Railway bridge structural health monitoring and fault detection: State-of-the-art methods and future challenges. Struct. Health Monit. 2018, 17, 971–1007. [Google Scholar] [CrossRef]
- Li, Q.; He, Y.; Zhou, K.; Han, X.; He, Y.; Shu, Z. Structural health monitoring for a 600 m high skyscraper. Struct. Des. Tall Spec. Build. 2018, 27, e1490. [Google Scholar] [CrossRef]
- Zhou, K.; Li, Q.S.; Zhi, L.H.; Han, X.L.; Xu, K. Investigation of modal parameters of a 600-m-tall skyscraper based on two-year-long structural health monitoring data and five typhoons measurements. Eng. Struct. 2023, 274, 115162. [Google Scholar] [CrossRef]
- Wei, Y.; Xie, P.; Zhang, L. Tikhonov regularization and randomized GSVD. SIAM J. Matrix Anal. Appl. 2016, 37, 649–675. [Google Scholar] [CrossRef]
- Park, Y.; Reichel, L.; Rodriguez, G.; Yu, X. Parameter determination for Tikhonov regularization problems in general form. J. Comput. Appl. Math. 2018, 343, 12–25. [Google Scholar] [CrossRef]
- Wu, Z.; Bian, S.; Xiang, C.; Tong, Y. A new method for TSVD regularization truncated parameter selection. Math. Probl. Eng. 2013, 2013, 161834. [Google Scholar] [CrossRef]
- Aucejo, M.; De Smet, O. An optimal Bayesian regularization for force reconstruction problems. Mech. Syst. Signal Process. 2019, 126, 98–115. [Google Scholar] [CrossRef]
- Li, Q.; Lu, Q. A revised time domain force identification method based on Bayesian formulation. Int. J. Numer. Methods Eng. 2019, 118, 411–431. [Google Scholar] [CrossRef]
- Golub, G.H.; Von Matt, U. Generalized cross-validation for large-scale problems. J. Comput. Graph. Stat. 1997, 6, 1–34. [Google Scholar] [CrossRef]
- Hansen, P.C. Analysis of discrete ill-posed problems by means of the L-curve. SIAM Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Schmidt, M. Least squares optimization with L1-norm regularization. CS542B Proj. Rep. 2005, 504, 195–221. [Google Scholar]
- Huang, X.; Yang, X.; Zhao, J.; Xiong, L.; Ye, Y. A new weighting k-means type clustering framework with an l2-norm regularization. Knowl.-Based Syst. 2018, 151, 165–179. [Google Scholar] [CrossRef]
- Kaltenbacher, B.; Neubauer, A.; Scherzer, O. Iterative Regularization Methods for Nonlinear Ill-Posed Problems; de Gruyter: Berlin, Germany, 2008. [Google Scholar] [CrossRef]
- Kilmer, M.E.; O’Leary, D.P. Choosing regularization parameters in iterative methods for ill-posed problems. SIAM J. Matrix Anal. Appl. 2001, 22, 1204–1221. [Google Scholar] [CrossRef]
- Hanke, M. Accelerated Landweber iterations for the solution of ill-posed equations. Numer. Math. 1991, 60, 341–373. [Google Scholar] [CrossRef]
- Haltmeier, M.; Leitao, A.; Scherzer, O. Kaczmarz methods for regularizing nonlinear ill-posed equations I: Convergence analysis. Inverse Probl. Imaging 2007, 1, 289. [Google Scholar] [CrossRef]
- Li, H.; Haltmeier, M. The averaged Kaczmarz iteration for solving inverse problems. SIAM J. Imaging Sci. 2018, 11, 618–642. [Google Scholar] [CrossRef]
- Chung, J.; Gazzola, S. Flexible Krylov methods for \ell_p regularization. SIAM J. Sci. Comput. 2019, 41, S149–S171. [Google Scholar] [CrossRef]
- Hanke, M. Conjugate Gradient Type Methods for Ill-Posed Problems; Chapman and Hall/CRC: Boca Raton, FL, USA, 2017. [Google Scholar] [CrossRef]
- Huang, Y.; Jia, Z. Some results on the regularization of LSQR for large-scale discrete ill-posed problems. Sci. China Math. 2017, 60, 701–718. [Google Scholar] [CrossRef]
- Jia, Z. Regularization properties of Krylov iterative solvers CGME and LSMR for linear discrete ill-posed problems with an application to truncated randomized SVDs. Numer. Algorithms 2020, 85, 1281–1310. [Google Scholar] [CrossRef]
- Brianzi, P.; Favati, P.; Menchi, O.; Romani, F. A framework for studying the regularizing properties of Krylov subspace methods. Inverse Probl. 2006, 22, 1007. [Google Scholar] [CrossRef]
- Zhao, X.L.; Huang, T.Z.; Gu, X.M.; Deng, L.J. Vector extrapolation based Landweber method for discrete ill-posed problems. Math. Probl. Eng. 2017, 2017, 1375716. [Google Scholar] [CrossRef]
- Vonesch, C.; Unser, M. A fast thresholded landweber algorithm for wavelet-regularized multidimensional deconvolution. IEEE Trans. Image Process. 2008, 17, 539–549. [Google Scholar] [CrossRef]
- Zhang, H.; Cheng, L.Z. Projected Landweber iteration for matrix completion. J. Comput. Appl. Math. 2010, 235, 593–601. [Google Scholar] [CrossRef]
- Liang, L.; Xu, Y. Adaptive Landweber method to deblur images. IEEE Signal Process. Lett. 2003, 10, 129–132. [Google Scholar] [CrossRef]
- Chang, X.; Yan, Y.; Wu, Y. Study on solving the ill-posed problem of force load reconstruction. J. Sound Vib. 2019, 440, 186–201. [Google Scholar] [CrossRef]
- Kalhori, H.; Alamdari, M.M.; Ye, L. Automated algorithm for impact force identification using cosine similarity searching. Measurement 2018, 122, 648–657. [Google Scholar] [CrossRef]
- Atobe, S.; Sugimoto, S.; Hu, N.; Fukunaga, H. Impact damage monitoring of FRP pressure vessels based on impact force identification. Adv. Compos. Mater. 2014, 23, 491–505. [Google Scholar] [CrossRef]
- Kalhori, H.; Tashakori, S.; Halkon, B. Experimental Study on Impact Force Identification on a Multi-Storey Tower Structure Using Different Transducers. Vibration 2021, 4, 101–116. [Google Scholar] [CrossRef]
- Kalhori, H.; Ye, L.; Mustapha, S. Inverse estimation of impact force on a composite panel using a single piezoelectric sensor. J. Intell. Mater. Syst. Struct. 2017, 28, 799–810. [Google Scholar] [CrossRef]
- Hansen, P.C. Discrete Inverse Problems: Insight and Algorithms; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010. [Google Scholar]
- Kalhori, H.; Ye, L.; Mustapha, S.; Li, J.; Li, B. Reconstruction and analysis of impact forces on a steel-beam-reinforced concrete deck. Exp. Mech. 2016, 56, 1547–1558. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Position | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | ||
| Impact location | L1 | 9.04 | 4.09 | 14.97 | 3.36 | 25.32 | 35.74 | 5.32 | 22.12 | 16.45 | 12.10 |
| L2 | 47.51 | 10.46 | 45.85 | 10.42 | 10.30 | 12.69 | 4.82 | 51.03 | 3.82 | 8.05 | |
| L3 | 11.91 | 3.96 | 17.50 | 11.04 | 10.60 | 8.44 | 4.27 | 28.47 | 15.55 | 7.86 | |
| L4 | 67.59 | 33.17 | 50.34 | 8.34 | 12.51 | 27.00 | 17.78 | 77.05 | 26.17 | 21.70 | |
| L5 | 63.42 | 4.64 | 19.68 | 7.11 | 8.52 | 1.37 | 1.68 | 17.54 | 3.64 | 5.86 | |
| L6 | 11.07 | 6.42 | 3.07 | 5.28 | 7.27 | 1.08 | 4.45 | 4.06 | 3.58 | 19.54 | |
| L7 | 7.33 | 4.05 | 2.79 | 2.10 | 7.63 | 1.85 | 3.94 | 3.26 | 2.33 | 11.62 | |
| Sensor Position | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | ||
| Impact location | L1 | 9.04 | 3.64 | 6.28 | 2.91 | 23.95 | 26.85 | 3.03 | 18.19 | 13.66 | 10.80 |
| L2 | 21.24 | 3.18 | 13.31 | 6.13 | 9.55 | 4.83 | 4.01 | 14.72 | 3.12 | 7.54 | |
| L3 | 7.81 | 3.45 | 11.31 | 8.19 | 10.32 | 7.94 | 3.72 | 10.27 | 13.02 | 4.08 | |
| L4 | 30.97 | 8.00 | 6.31 | 3.61 | 11.20 | 14.12 | 9.05 | 33.32 | 15.05 | 21.70 | |
| L5 | 14.86 | 3.74 | 8.13 | 3.95 | 1.87 | 0.79 | 1.66 | 15.79 | 3.15 | 2.01 | |
| L6 | 10.64 | 5.12 | 3.07 | 3.55 | 7.12 | 0.84 | 4.20 | 4.01 | 1.64 | 17.79 | |
| L7 | 5.37 | 0.41 | 0.56 | 1.50 | 7.52 | 1.18 | 0.29 | 1.45 | 0.97 | 9.55 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rashidi, M.; Tashakori, S.; Kalhori, H.; Bahmanpour, M.; Li, B. Iterative-Based Impact Force Identification on a Bridge Concrete Deck. Sensors 2023, 23, 9257. https://doi.org/10.3390/s23229257
Rashidi M, Tashakori S, Kalhori H, Bahmanpour M, Li B. Iterative-Based Impact Force Identification on a Bridge Concrete Deck. Sensors. 2023; 23(22):9257. https://doi.org/10.3390/s23229257
Chicago/Turabian StyleRashidi, Maria, Shabnam Tashakori, Hamed Kalhori, Mohammad Bahmanpour, and Bing Li. 2023. "Iterative-Based Impact Force Identification on a Bridge Concrete Deck" Sensors 23, no. 22: 9257. https://doi.org/10.3390/s23229257
APA StyleRashidi, M., Tashakori, S., Kalhori, H., Bahmanpour, M., & Li, B. (2023). Iterative-Based Impact Force Identification on a Bridge Concrete Deck. Sensors, 23(22), 9257. https://doi.org/10.3390/s23229257