
Edge-Machine-Learning-Assisted Robust Magnetometer Based on Randomly Oriented NV-Ensembles in Diamond

 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
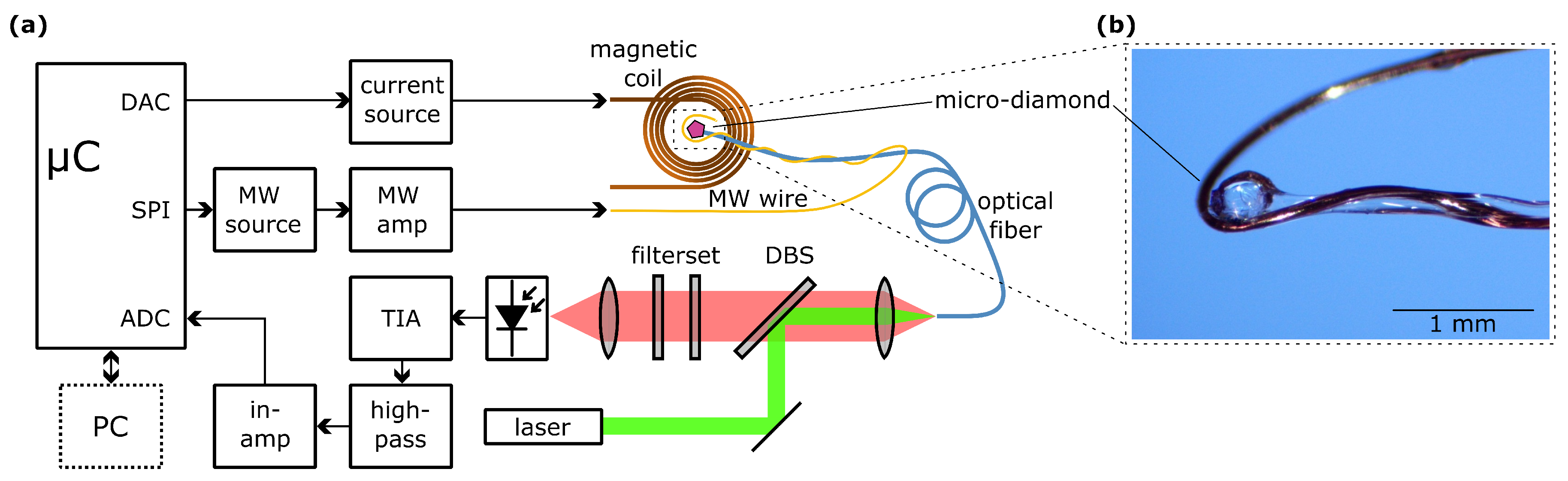
2.1. Experimental Setup
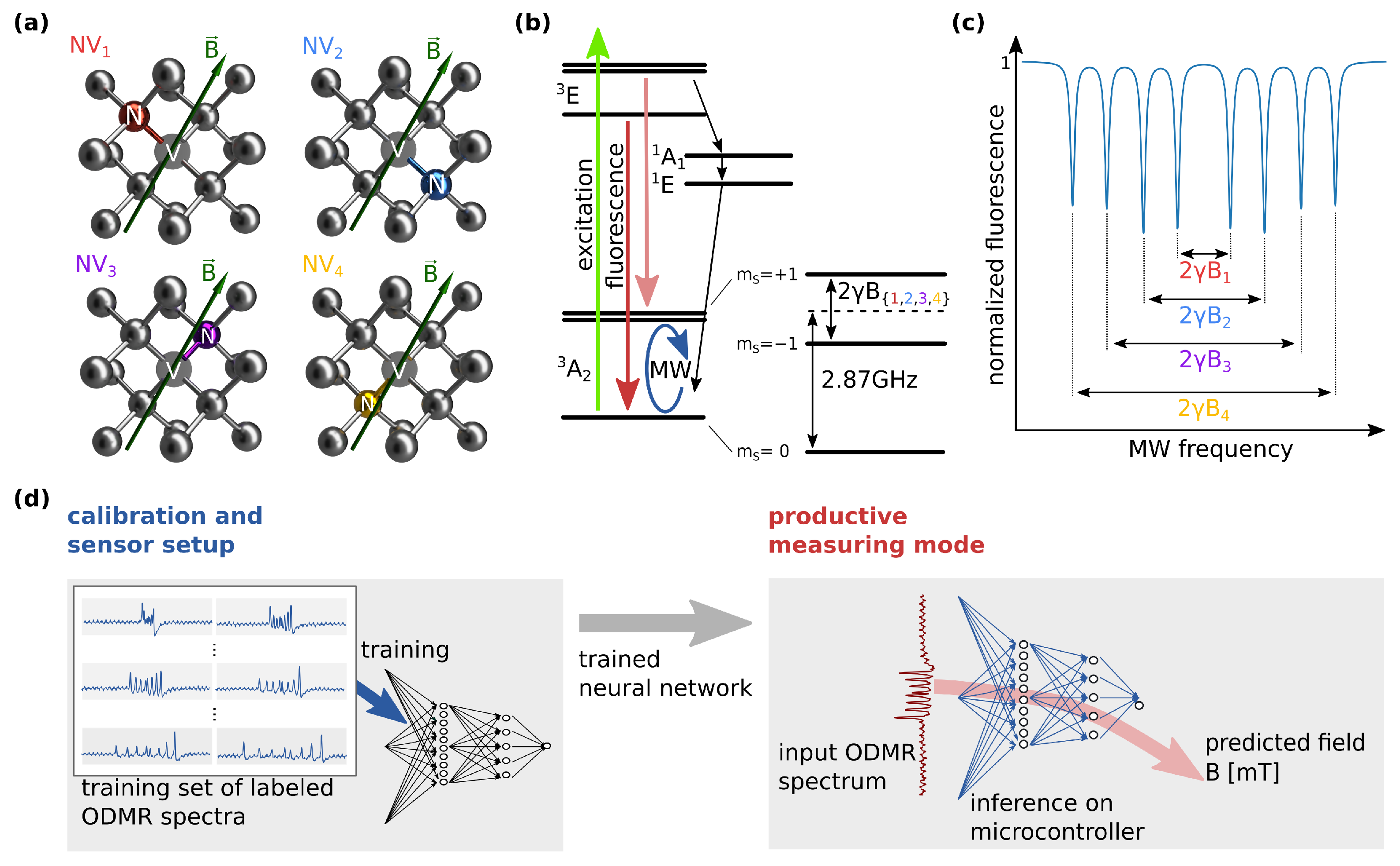
2.1.1. Diamond Sample
2.1.2. Optical Setup
2.1.3. Electronic Measurement Setup
2.2. Edge Machine Learning for ODMR Spectrum Analysis
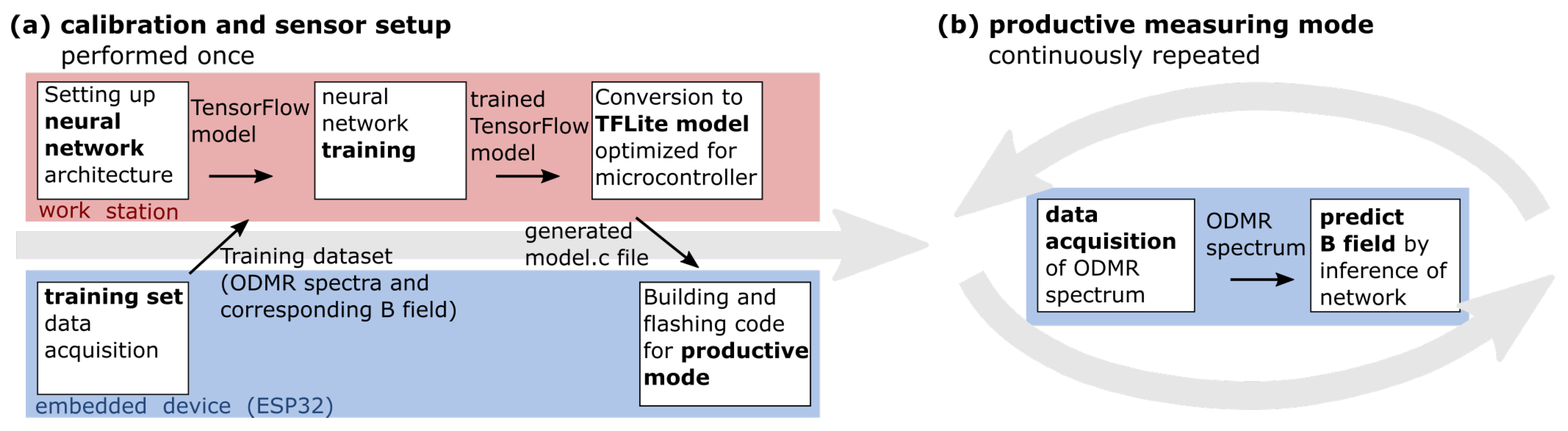
2.2.1. Conceptional Approach
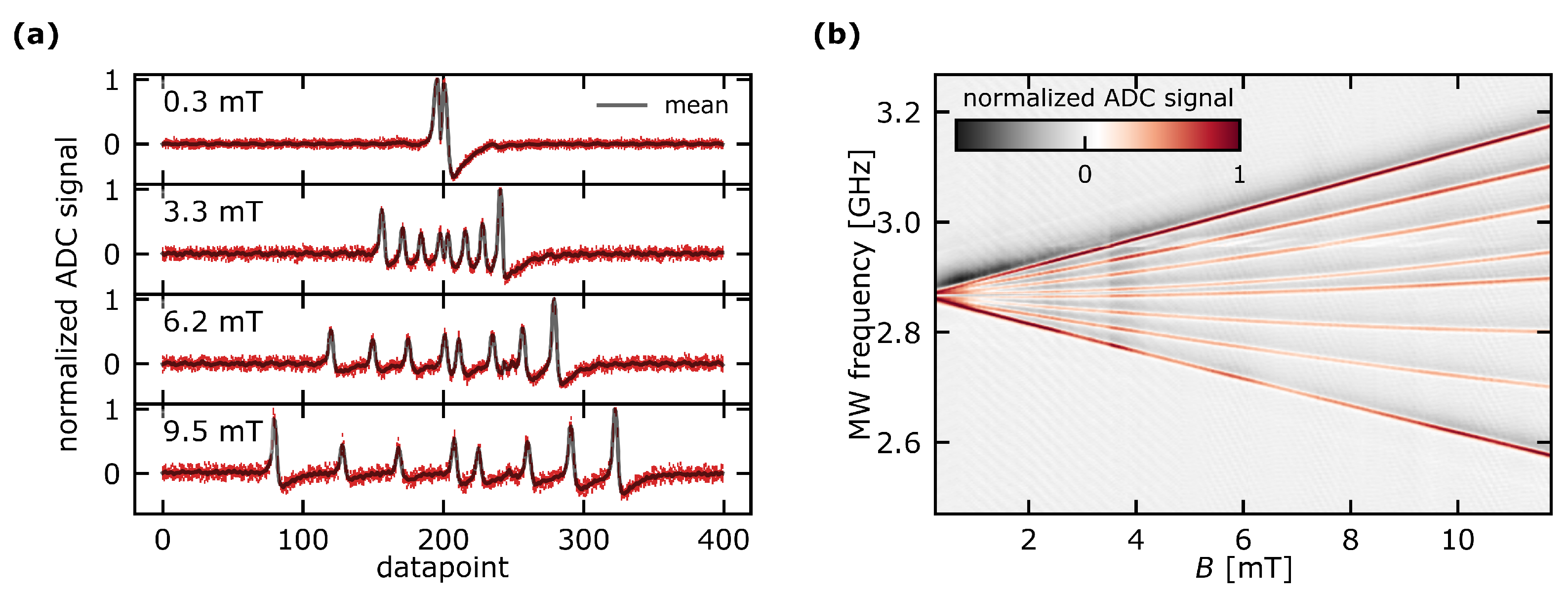
2.2.2. Training Set Acquisition
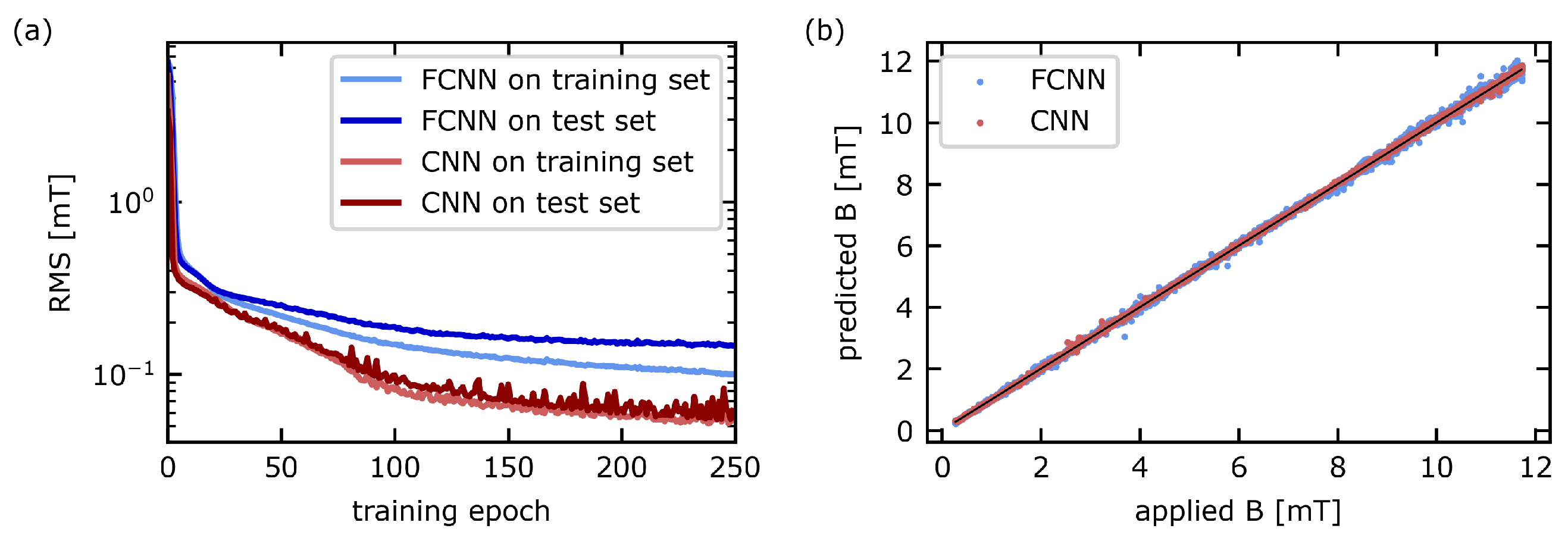
2.2.3. Neural Network Architecture
2.2.4. Neural Network Training
2.2.5. Deployment to the Embedded Device and Productive Mode
2.3. Sensor Performance
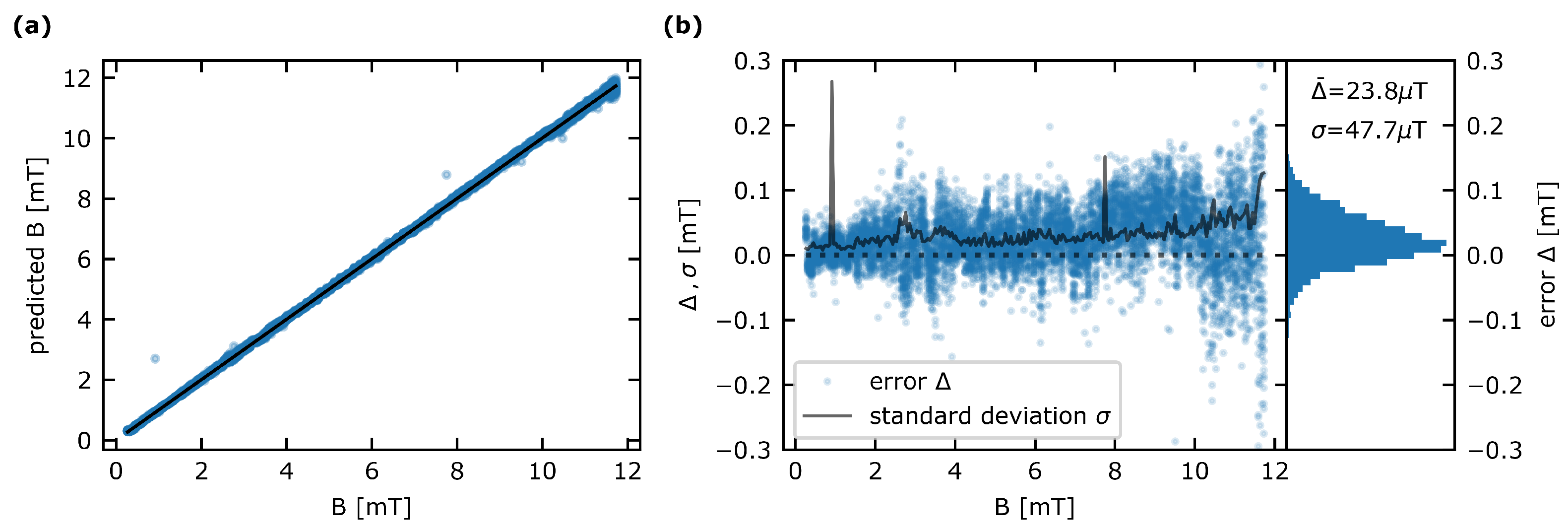
2.3.1. Sensitivity and Accuracy
2.3.2. Repetition Rate of Magnetic Field Measurements
3. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ODMR | Optically detected magnetic resonance |
| FCNN | Fully connected neural network |
| CNN | Convolutional neural network |
| CW | Continuous wave |
| MW | Microwave |
| NV | Nitrogen vacancy |
| ADC | Analog-to-digital converter |
| DAC | Digital-to-analog converter |
| TIA | Transimpedance amplifier |
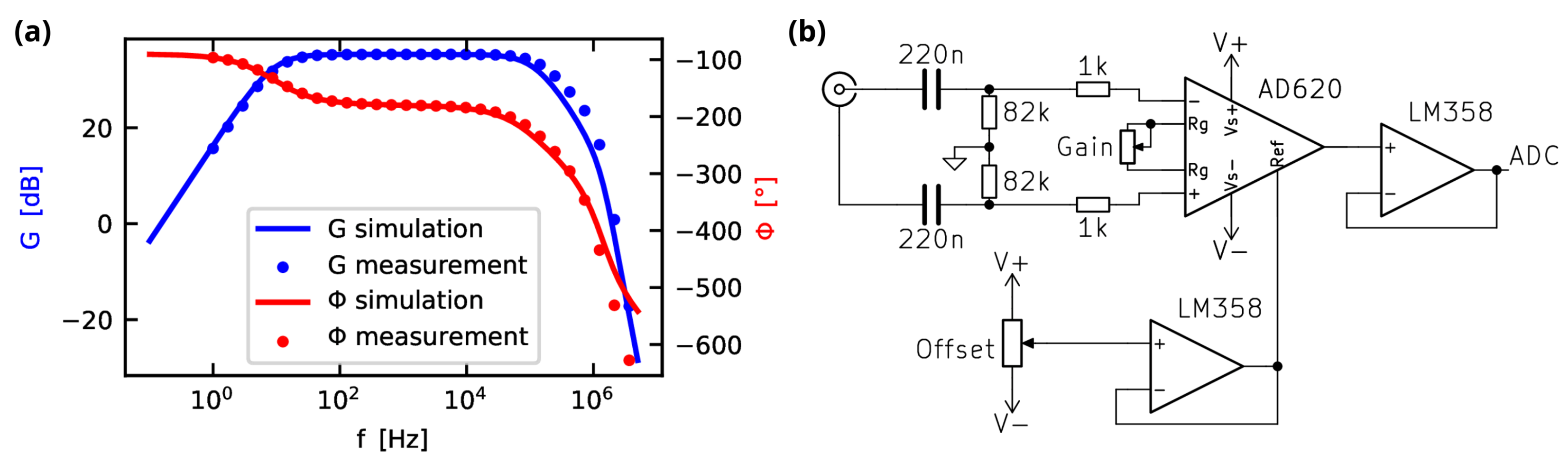
Appendix A. Electronics
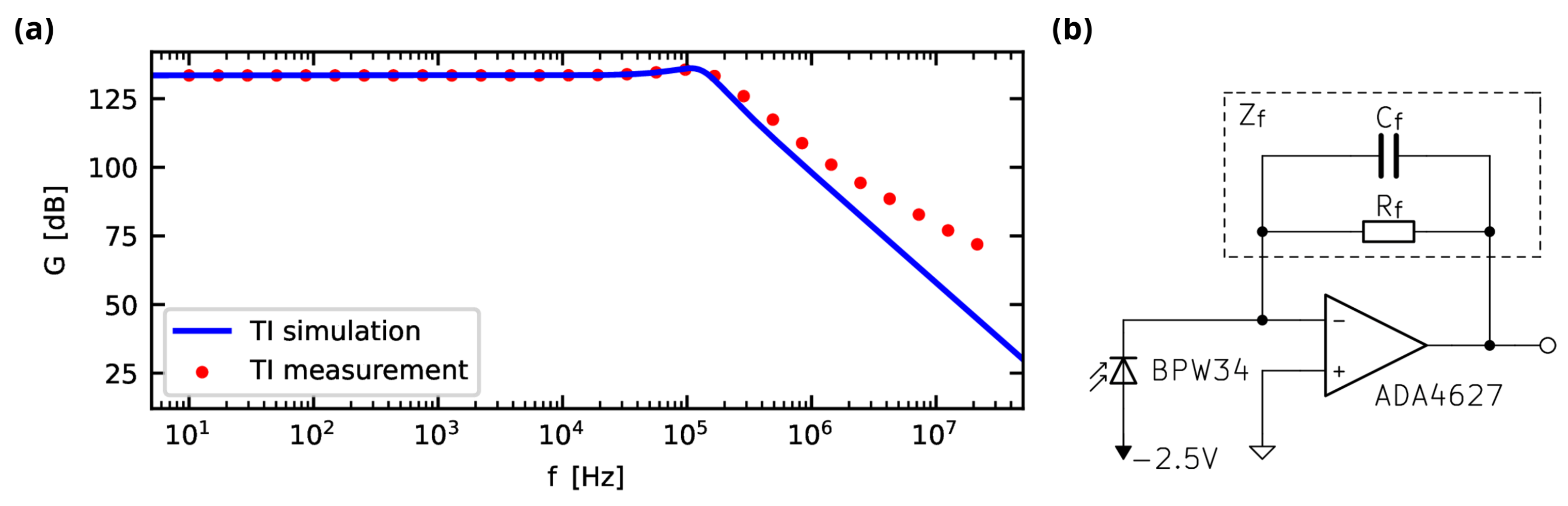
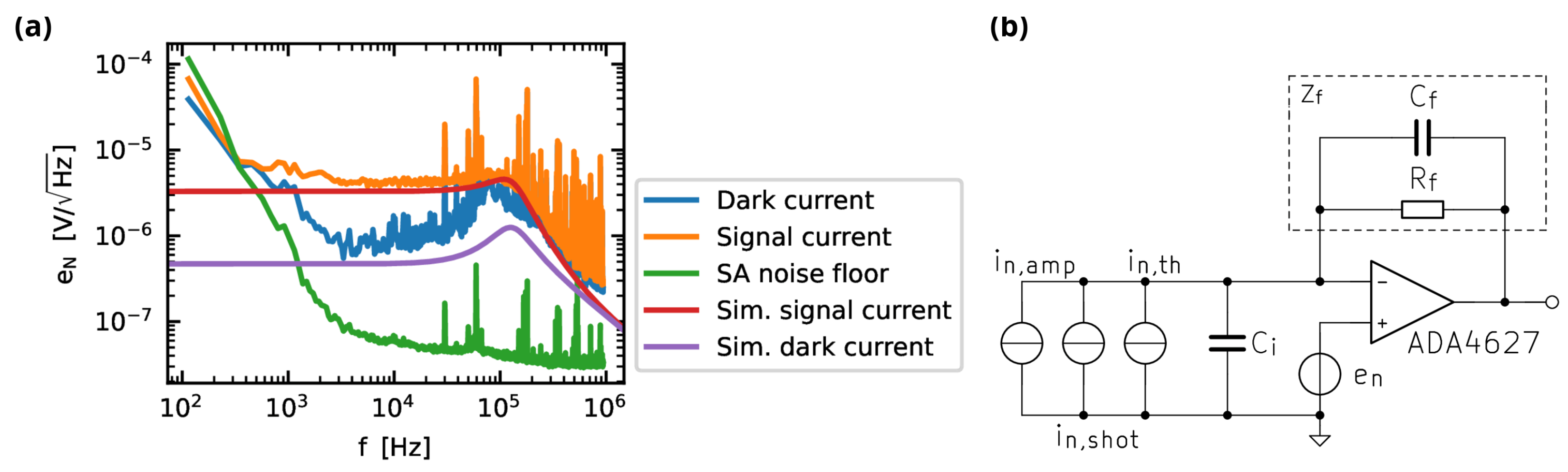
Appendix A.1. Transimpedance Amplifier


Appendix A.2. Inverting Buffer

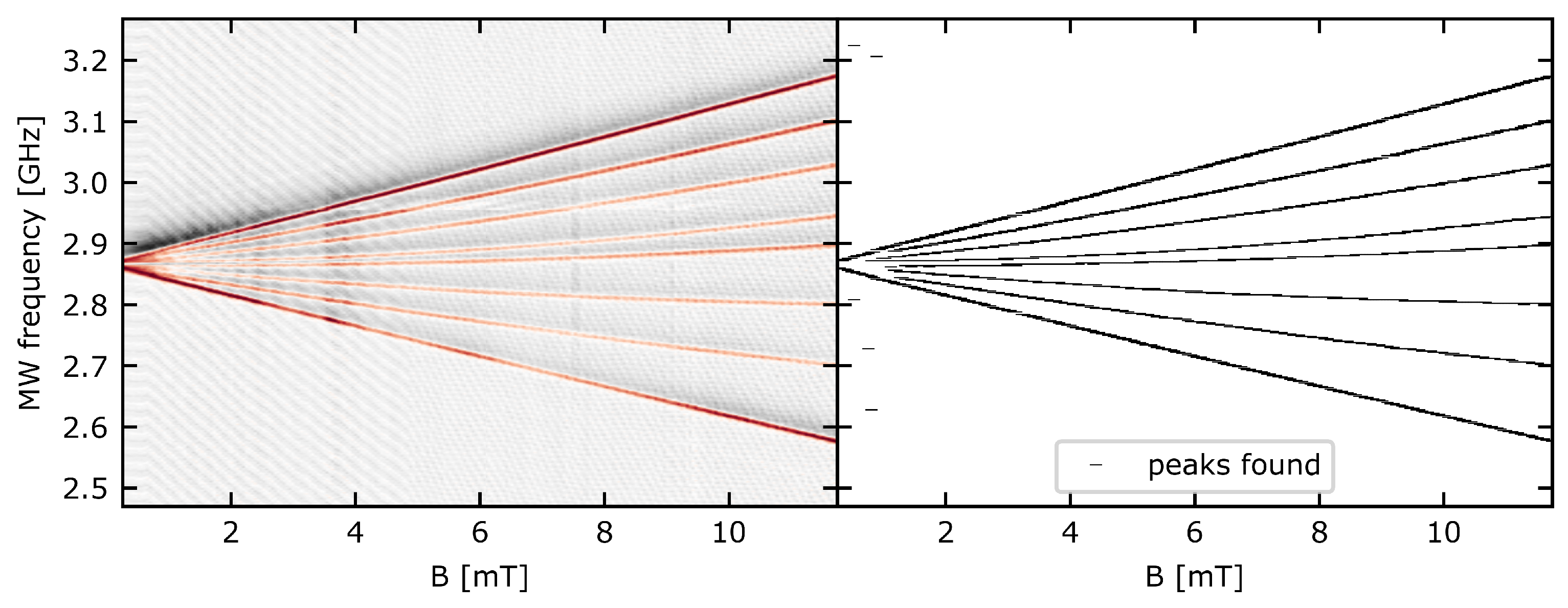
Appendix B. Deduction of Magnetic Field Magnitude in ODMR Spectra with Automated Peak Finding

References
- Stürner, F.M.; Brenneis, A.; Buck, T.; Kassel, J.; Rölver, R.; Fuchs, T.; Savitsky, A.; Suter, D.; Grimmel, J.; Hengesbach, S.; et al. Integrated and Portable Magnetometer Based on Nitrogen-Vacancy Ensembles in Diamond. Adv. Quantum Technol. 2021, 4, 2000111. [Google Scholar] [CrossRef]
- Clevenson, H.; Pham, L.M.; Teale, C.; Johnson, K.; Englund, D.; Braje, D. Robust high-dynamic-range vector magnetometry with nitrogen-vacancy centers in diamond. Appl. Phys. Lett. 2018, 112, 252406. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Yu, H.; Zhu, Y.; Qin, X.; Rong, X.; Duan, C.K.; Du, J. A hybrid magnetometer towards femtotesla sensitivity under ambient conditions. Sci. Bull. 2021, 66, 127–132. [Google Scholar] [CrossRef]
- Zhou, T.X.; Stöhr, R.J.; Yacoby, A. Scanning diamond NV center probes compatible with conventional AFM technology. Appl. Phys. Lett. 2017, 111, 163106. [Google Scholar] [CrossRef]
- Rondin, L.; Tetienne, J.P.; Spinicelli, P.; Dal Savio, C.; Karrai, K.; Dantelle, G.; Thiaville, A.; Rohart, S.; Roch, J.F.; Jacques, V. Nanoscale magnetic field mapping with a single spin scanning probe magnetometer. Appl. Phys. Lett. 2012, 100, 153118. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.; Grinolds, M.S.; Pham, L.M.; Le Sage, D.; Luan, L.; Walsworth, R.L.; Yacoby, A. Nanoscale magnetometry with NV centers in diamond. MRS Bull. 2013, 38, 155–161. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Guo, H.; Zhao, R.; Du, F.; Li, Z.; Wang, L.; Wu, D.; Chen, Y.; Tang, J.; Liu, J. High-sensitivity three-axis vector magnetometry using electron spin ensembles in single-crystal diamond. IEEE Magn. Lett. 2019, 10, 8101104. [Google Scholar] [CrossRef]
- Schloss, J.M.; Barry, J.F.; Turner, M.J.; Walsworth, R.L. Simultaneous broadband vector magnetometry using solid-state spins. Phys. Rev. Appl. 2018, 10, 034044. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Hou, X.; Ge, F.; Zhang, X.; Ji, Y.; Li, H.; Qian, P.; Wang, Y.; Xu, N.; Du, J. Calibration-free vector magnetometry using nitrogen-vacancy center in diamond integrated with optical vortex beam. Nano Lett. 2020, 20, 8267–8272. [Google Scholar] [CrossRef]
- Tsukamoto, M.; Ogawa, K.; Ozawa, H.; Iwasaki, T.; Hatano, M.; Sasaki, K.; Kobayashi, K. Vector magnetometry using perfectly aligned nitrogen-vacancy center ensemble in diamond. Appl. Phys. Lett. 2021, 118, 264002. [Google Scholar] [CrossRef]
- C. Sánchez, E.; Pessoa, A.; Amaral, A.; de S. Menezes, L. Microcontroller-based magnetometer using a single nitrogen-vacancy defect in a nanodiamond. AIP Adv. 2020, 10, 025323. [Google Scholar] [CrossRef] [Green Version]
- Mariani, G.; Umemoto, A.; Nomura, S. A home-made portable device based on Arduino Uno for pulsed magnetic resonance of NV centers in diamond. AIP Adv. 2022, 12, 065321. [Google Scholar] [CrossRef]
- Barson, M.S.; Peddibhotla, P.; Ovartchaiyapong, P.; Ganesan, K.; Taylor, R.L.; Gebert, M.; Mielens, Z.; Koslowski, B.; Simpson, D.A.; McGuinness, L.P.; et al. Nanomechanical sensing using spins in diamond. Nano Lett. 2017, 17, 1496–1503. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gruber, A.; Drabenstedt, A.; Tietz, C.; Fleury, L.; Wrachtrup, J.; Borczyskowski, C.v. Scanning confocal optical microscopy and magnetic resonance on single defect centers. Science 1997, 276, 2012–2014. [Google Scholar] [CrossRef] [Green Version]
- Doherty, M.; Dolde, F.; Fedder, H.; Jelezko, F.; Wrachtrup, J.; Manson, N.; Hollenberg, L. Theory of the ground-state spin of the NV- center in diamond. Phys. Rev. B 2012, 85, 205203. [Google Scholar] [CrossRef] [Green Version]
- Dolde, F.; Fedder, H.; Doherty, M.W.; Nöbauer, T.; Rempp, F.; Balasubramanian, G.; Wolf, T.; Reinhard, F.; Hollenberg, L.C.; Jelezko, F.; et al. Electric-field sensing using single diamond spins. Nat. Phys. 2011, 7, 459–463. [Google Scholar] [CrossRef]
- Wang, P.; Yuan, Z.; Huang, P.; Rong, X.; Wang, M.; Xu, X.; Duan, C.; Ju, C.; Shi, F.; Du, J. High-resolution vector microwave magnetometry based on solid-state spins in diamond. Nat. Commun. 2015, 6, 6631. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ozawa, H.; Tahara, K.; Ishiwata, H.; Hatano, M.; Iwasaki, T. Formation of perfectly aligned nitrogen-vacancy-center ensembles in chemical-vapor-deposition-grown diamond (111). Appl. Phys. Express 2017, 10, 045501. [Google Scholar] [CrossRef]
- Tetienne, J.P.; Hingant, T.; Martínez, L.; Rohart, S.; Thiaville, A.; Diez, L.H.; Garcia, K.; Adam, J.P.; Kim, J.V.; Roch, J.F.; et al. The nature of domain walls in ultrathin ferromagnets revealed by scanning nanomagnetometry. Nat. Commun. 2015, 6, 6733. [Google Scholar] [CrossRef] [Green Version]
- Tsukamoto, M.; Ito, S.; Ogawa, K.; Ashida, Y.; Sasaki, K.; Kobayashi, K. Accurate magnetic field imaging using nanodiamond quantum sensors enhanced by machine learning. Sci. Rep. 2022, 12, 13942. [Google Scholar] [CrossRef]
- Liao, Y.W.; Li, Q.; Yang, M.; Liu, Z.H.; Yan, F.F.; Wang, J.F.; Zhou, J.Y.; Lin, W.X.; Tang, Y.D.; Xu, J.S.; et al. Deep-Learning-Enhanced Single-Spin Readout in Silicon Carbide at Room Temperature. Phys. Rev. Appl. 2022, 17, 034046. [Google Scholar] [CrossRef]
- Dushenko, S.; Ambal, K.; McMichael, R.D. Sequential Bayesian experiment design for optically detected magnetic resonance of nitrogen-vacancy centers. Phys. Rev. Appl. 2020, 14, 054036. [Google Scholar] [CrossRef] [PubMed]
- Fujisaku, T.; So, F.T.K.; Igarashi, R.; Shirakawa, M. Machine-Learning Optimization of Multiple Measurement Parameters Nonlinearly Affecting the Signal Quality. ACS Meas. Sci. Au 2021, 1, 20–26. [Google Scholar] [CrossRef]
- Verhelst, M.; Murmann, B. Machine learning at the edge. NANO-CHIPS 2030 2020, 293–322. [Google Scholar] [CrossRef]
- Plastiras, G.; Terzi, M.; Kyrkou, C.; Theocharidcs, T. Edge Intelligence: Challenges and Opportunities of Near-Sensor Machine Learning Applications. In Proceedings of the 2018 IEEE 29th International Conference on Application-Specific Systems, Architectures and Processors (ASAP), Milano, Italy, 10–12 July 2018; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Merenda, M.; Porcaro, C.; Iero, D. Edge machine learning for AI-enabled IoT devices: A review. Sensors 2020, 20, 2533. [Google Scholar] [CrossRef] [PubMed]
- David, R.; Duke, J.; Jain, A.; Janapa Reddi, V.; Jeffries, N.; Li, J.; Kreeger, N.; Nappier, I.; Natraj, M.; Wang, T.; et al. TensorFlow lite micro: Embedded machine learning for TinyML systems. Proc. Mach. Learn. Syst. 2021, 3, 800–811. [Google Scholar] [CrossRef]
- Warden, P.; Situnayake, D. TinyML: Machine Learning with TensorFlow Lite on Arduino and Ultra-Low-Power Microcontrollers; O’Reilly Media: Sebastopol, CA, USA, 2019. [Google Scholar]
- Ray, P.P. A review on TinyML: State-of-the-art and prospects. J. King Saud Univ.—Comput. Inf. Sci. 2022, 34, 1595–1623. [Google Scholar] [CrossRef]
- Adámas Nanotechnologies, Fluorescent Microdiamonds. Available online: https://www.adamasnano.com/fluorescent-agents/ (accessed on 24 July 2022).
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. arXiv 2015. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. Available online: https://docs.scipy.org/doc/scipy/reference/generated/scipy.signal.find_peaks.html (accessed on 15 November 2022). [CrossRef]
- Chipaux, M.; Tallaire, A.; Achard, J.; Pezzagna, S.; Meijer, J.; Jacques, V.; Roch, J.F.; Debuisschert, T. Magnetic imaging with an ensemble of nitrogen-vacancy centers in diamond. Eur. Phys. J. D 2015, 69, 166. [Google Scholar] [CrossRef] [Green Version]
- Zheng, D.; Ma, Z.; Guo, W.; Niu, L.; Wang, J.; Chai, X.; Li, Y.; Sugawara, Y.; Yu, C.; Shi, Y.; et al. A hand-held magnetometer based on an ensemble of nitrogen-vacancy centers in diamond. J. Phys. D Appl. Phys. 2020, 53, 155004. [Google Scholar] [CrossRef]
- Patel, R.; Zhou, L.; Frangeskou, A.; Stimpson, G.; Breeze, B.; Nikitin, A.; Dale, M.; Nichols, E.; Thornley, W.; Green, B.; et al. Subnanotesla Magnetometry with a Fiber-Coupled Diamond Sensor. Phys. Rev. Appl. 2020, 14, 044058. [Google Scholar] [CrossRef]
- Sewani, V.K.; Vallabhapurapu, H.H.; Yang, Y.; Firgau, H.R.; Adambukulam, C.; Johnson, B.C.; Pla, J.J.; Laucht, A. Coherent control of NV-centers in diamond in a quantum teaching lab. Am. J. Phys. 2020, 88, 1156–1169. [Google Scholar] [CrossRef]
- Bucher, D.B.; Craik, D.P.L.A.; Backlund, M.P.; Turner, M.J.; Dor, O.B.; Glenn, D.R.; Walsworth, R.L. Quantum diamond spectrometer for nanoscale NMR and ESR spectroscopy. Nat. Protoc. 2019, 14, 2707–2747. [Google Scholar] [CrossRef] [PubMed]
- Hobbs, P.C. Photodiode Front Ends: The Real Story. Opt. Photon. News 2001, 12, 44–47. [Google Scholar] [CrossRef] [Green Version]
- Staacke, R.; John, R.; Wunderlich, R.; Horsthemke, L.; Knolle, W.; Laube, C.; Glösekötter, P.; Burchard, B.; Abel, B.; Meijer, J. Isotropic Scalar Quantum Sensing of Magnetic Fields for Industrial Application. Adv. Quantum Technol. 2020, 3, 2000037. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Number of Trainable Parameters | Root-Mean-Square Error on Test Set | Size of Generated Model |
|---|---|---|---|
| FCNN | 6236 | 0.1392 mT | 164 KB |
| CNN | 5928 | 0.0636 mT | 167 KB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Homrighausen, J.; Horsthemke, L.; Pogorzelski, J.; Trinschek, S.; Glösekötter, P.; Gregor, M. Edge-Machine-Learning-Assisted Robust Magnetometer Based on Randomly Oriented NV-Ensembles in Diamond. Sensors 2023, 23, 1119. https://doi.org/10.3390/s23031119
Homrighausen J, Horsthemke L, Pogorzelski J, Trinschek S, Glösekötter P, Gregor M. Edge-Machine-Learning-Assisted Robust Magnetometer Based on Randomly Oriented NV-Ensembles in Diamond. Sensors. 2023; 23(3):1119. https://doi.org/10.3390/s23031119
Chicago/Turabian StyleHomrighausen, Jonas, Ludwig Horsthemke, Jens Pogorzelski, Sarah Trinschek, Peter Glösekötter, and Markus Gregor. 2023. "Edge-Machine-Learning-Assisted Robust Magnetometer Based on Randomly Oriented NV-Ensembles in Diamond" Sensors 23, no. 3: 1119. https://doi.org/10.3390/s23031119
APA StyleHomrighausen, J., Horsthemke, L., Pogorzelski, J., Trinschek, S., Glösekötter, P., & Gregor, M. (2023). Edge-Machine-Learning-Assisted Robust Magnetometer Based on Randomly Oriented NV-Ensembles in Diamond. Sensors, 23(3), 1119. https://doi.org/10.3390/s23031119